輪腿式機器人運動學分析及其步態規劃
2023-11-28 12:43:48陳耀軒周子堯王崢宇
起重運輸機械 2023年21期
陳耀軒 周子堯 王崢宇 梅 杰,2 陳 昆,2
1 武漢理工大學交通與物流工程學院 武漢 430063 2 武漢理工大學智能制造與控制研究所 武漢 430063
0 引言
目前,智能機器人領域的發展呈現多元化、智能化等趨勢,機器人產業得到極大發展,各種可移動機器人陸續被研制出來協助人們的生產和生活,使用移動機器人替代人類在各領域工作的研究也吸引了諸多學者的關注[1]。按照移動機器人結構的不同,可將其分為輪式、腿式、履帶式機器人等[2]。面對較為復雜的路面,傳統的依靠單一移動模式的機器人逐漸難以滿足需求。因此,復合式地面移動機器人成為重點研究熱點[3]。目前,輪腿式結構主要有3 種,輪子安裝在機器人腿的末端,輪腿步態轉換依靠末端輪子的收放;輪子與機器人腿結構分開,輪腿步態轉換依靠各機構獨自運行[4];輪腿混合機構,該機構具有輪式與腿式機器人的部分特征,輪腿步態不嚴格區分。這3 種輪腿機器人結構提高了機器人在非結構特種環境下的運動性能。輪腿式機器人兼具輪式機器人的快速性、平穩性以及腿式機器人的高越障性,可以隨外界環境調整自己的運動姿態,已經成為移動機器人領域一個充滿活力、具有挑戰性的前沿發展方向[5]。
本文設計了一種多功能、可實現構型切換、可搭載末端夾取裝置的輪腿式機器人,該輪腿機器人擁有4 條肢體,每條肢體都是由關節模塊和碳纖維連接板組成的三自由度機械腿,通過仿真和試驗分析來驗證其穩定性。
1 機器人機械結構設計
1.1 軀體結構設計
輪腿機器人軀體部分主要由碳纖維板和亞克力板構成,在機殼前端頭部安裝有雙目相機,在后端裝有軀體輪;軀體內部布置有電池組、上位機和下位機,分別用于控制整機和軀體輪。軀體內部構造如圖1 所示。
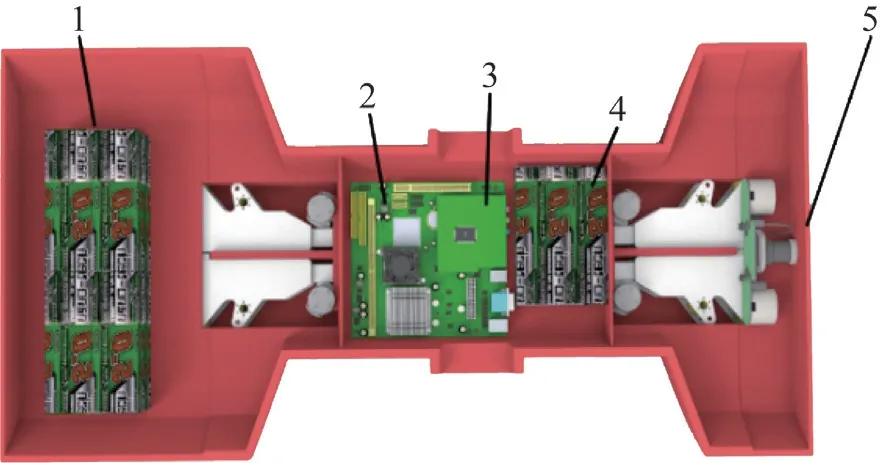
圖1 輪腿機器人軀體內部構造
1.2 輪腿結構設計
本項目設計了3 關節腿部機構,由2 個俯仰關節和一個偏擺關節組成。機器人的前腿在此基礎上于肢體末端增加了另外2 個自由度用于足末端夾取裝置的收放旋轉,使該機器人具有充足的靈活性,可實現構型切換和使用末端夾取裝置進行作業。前后腿腿部結構如圖2。
在行進過程中,關節1 向外偏擺以使腿關節有足夠的空間進行變形,關節3 根據下位機的指令輸出特定角度的俯仰運動以使輪腿部分抬起,關節2 可配合關節3進行俯仰運動邁開輪腿,并通過角度的調節使腿足維持豎直,關節3 再進行俯仰運動使腿足部分抓住地面,關節1 向內側收回即可完成一個運動周期。其中,末端夾取裝置可安裝在前足端上側,連接穩定的同時也方便隨時拆卸。
2 機器人肢體運動性能分析
本項目旨在解決特種場景下機器人的工作問題,項目采用了串聯的三連桿輪腿式結構,每條腿存在3 個自由度。但在實際運動過程中,并不需要所有關節都參與,只是涉及到部分關節結構的運作和調整。經分析,對機器人行進過程中四足腿式構形的步態規劃可簡化為單腿的1 個側擺運動和2 個俯仰運動,4 腿左右對稱分布,情況類似。
因此,可以利用機器人學中D-H 建模法對之進行建模,格局關節布置方式可達相關的D-H 參數,進而建立Matlab 姿態仿真調試模型[6]如圖3 所示。
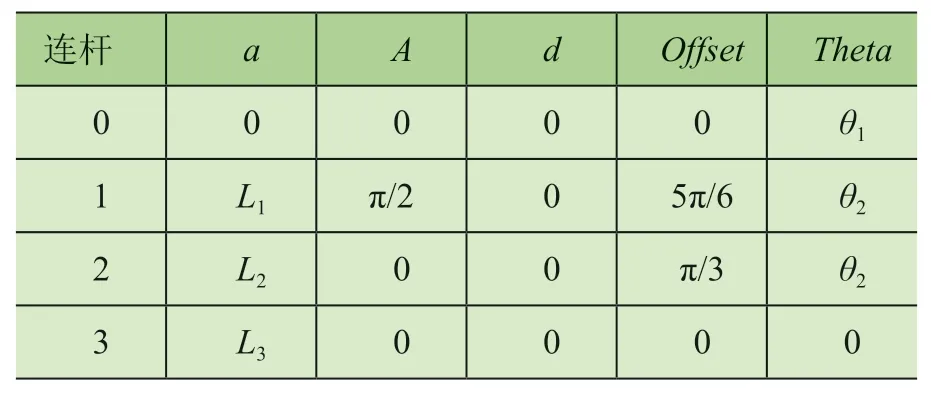
表1 連桿及其參數
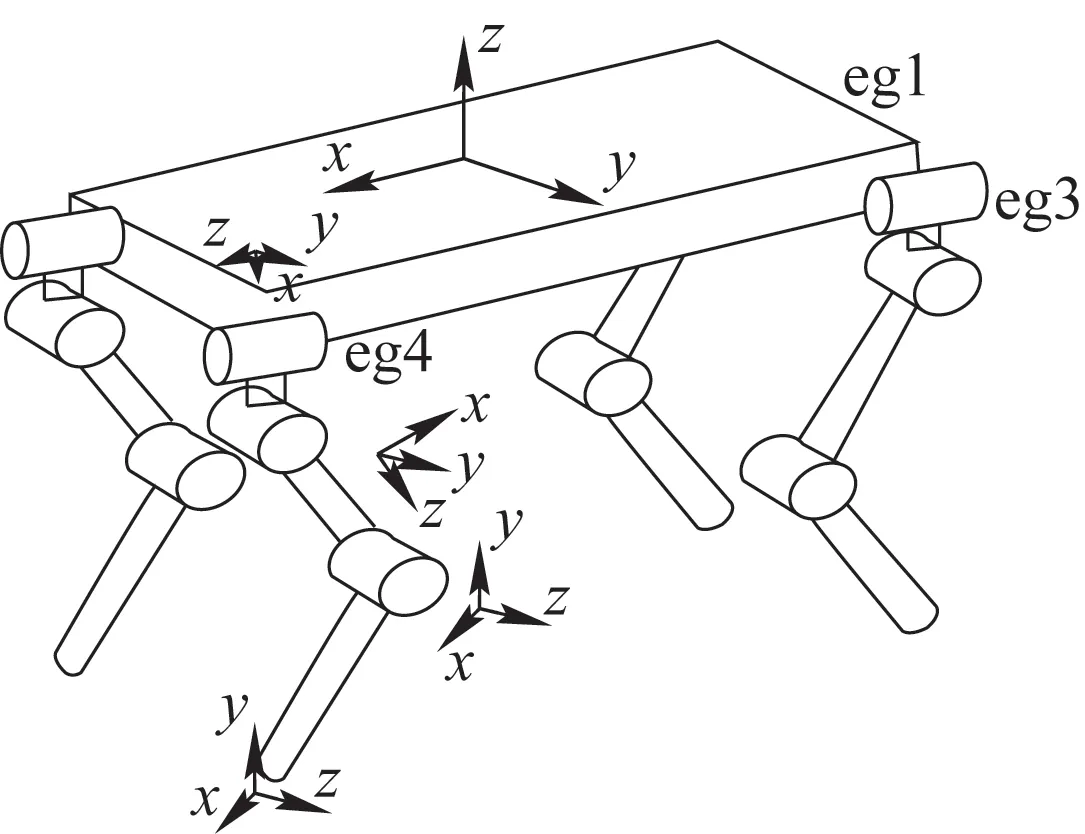
圖3 Matlab 姿態仿真調試模型
求得腿式機構中單腿運動學正解(B、T為D-H 參數決定的坐標變換矩陣)
運動學逆解是實現步態規劃的基礎,根據求得的各關節角作為機器人的位置驅動。運用解析法求機器人運動學逆解,經過一系列矩陣運算和變量代換得到的逆運動學結果為
3 機器人仿真分析
3.1 步態規劃分析
四足動物的步態是指各個腿之間具有固定相位關系的行走模式,不同的動物由于自身條件的限制,如腿長、腿的位置、神經控制方式等,其步態也會變得不一樣。如雙足動物的行走、奔跑,四足動物的行走(以下簡稱Walk)、對角小跑(以下簡稱Trot)。本項目以LF(左前腿)、RF(右前腿)、RB(右后腿)、LB(左后腿)分別替代四足動物的4 條腿,然后可以根據其步態的特點得出它們各自的相位關系。步態是實現仿生四足機器人運動性能的基礎規劃,步態的協調性、連續性與可調整性直接決定著仿生四足機器人運動性能的優劣[7]。
足內關系是步態的一部分,在研究四足動物的足間協調規律后,本文研究了同一條腿之間髖關節與膝關節之間的相位關系。為了簡化控制難度,提出了以下必要性假設:
1)膝關節的運動不影響四足機器人的步長,步長只由髖關節決定,并且膝關節運動的主要目的是提高抬腿的足末端高度,使得步態圓滑,機器人抬腿、落地流暢,不會出現搓地、絆腳的問題;
2)軀體內部器件質量分布均勻,機器人中心與幾何中心重合,且在運動過程中,腿部動作的擺動對機器人重心位置的影響忽略不計;
3)當機器人正常運動時,支腿足末端與地面的接觸面簡化為點。
通過觀察四足機器人的行走協調,總結出了具有普遍意義的四足機器人組內髖關節與膝關節協調規律:
1)在四足機器人在正常行走過程中,同一條腿的膝關節與髖關節存在著固定的相位函數關系;
2)當步態處于擺動相時,膝關節與髖關節同步運動,髖關節擺動的前階段,膝關節往身體內曲腿,當運動到擺動中點時,膝關節曲腿角度到最大,運動到擺動后期時,膝關節開始伸腿展開,當運動到擺動終點時間,膝關節恢復原位。
3)當處于支撐相時,髖關節往后擺動推動軀體,而膝關節保持原狀態不動。
基于上述髖關節與膝關節的運動規律,引入半波函數(膝關節處腿部擺動相時,按波形運動,支撐相時不運動),可以得知膝關節的控制曲線表示為
式中:Ah、Ak分別為髖關節和膝關節驅動波形的幅值,即使運動周期中的最大轉動角度;θk(t)為關節的驅動信號關于時間的函數,可計算得出髖關節與膝關節的波形圖;sgn(ψ)為標志函數。
假設sgn(ψ)是一個正弦函數,版波函數膝關節規劃函數符合四足機器人的步態規律,且曲線圓滑、可調節性高,可以有效解決絆腳、搓地等問題。
3.1.1 基于中央模式發生器的步態分析
生物的節律步態是生物神經節律控制機理產生的一種自激振蕩、相位互鎖的運動模式,由生物低級神經中樞的中樞模式發生器(Central Pattern Generator,CPG)產生的節律信號控制。CPG 是節律運動的中心控制器,不僅需要產生節律信號,控制執行器進行運動,還需要根據反饋信號進行識別,及時修改生成新的信號,使四足機器人能夠穩定行走。
本文采用Hopf 振蕩器來建立四足機器人的CPG 模型。根據足間與足內的拓撲關系可以構建出四足機器人的分層拓撲關系圖見圖4。
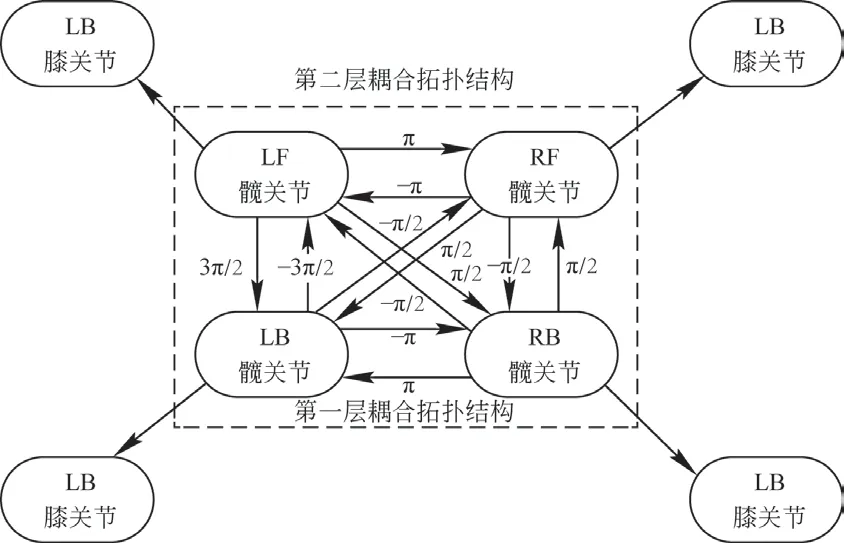
圖4 足間與足內的拓撲關系
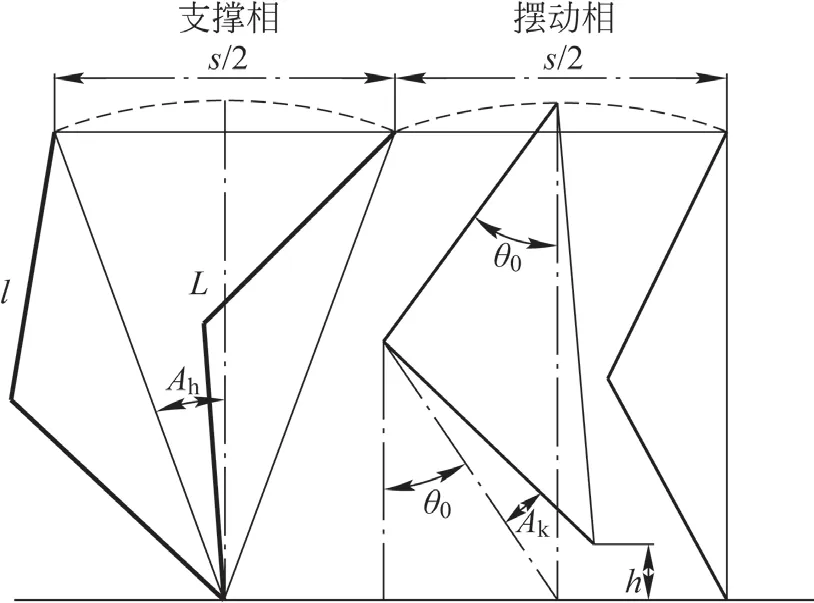
圖5 四足機器人單腿運動圖解
單個Hopf 振蕩器的數學表達式為
根據上文給定的拓撲關系構建的8 路(髖關節4 路、膝關節4 路)Hopf 振蕩器的狀態方程,可以利用積分器對該微分方程進行求解,無需利用龍格庫塔數值解法或者是牛頓法求解微分方程。
式中:xi為振蕩器的輸出,用作骸關節角度控制信號,即θhi=xi;右端第二項為振蕩器間耦合項;為i和j振蕩器之間的相對相位;R()為旋轉矩陣,描述了各振蕩器之間的相s位耦合關系。
坐標變換陣或是步態權重矩陣利用坐標變換原理,可使不同腿、關節之間的信號相位可以按照步態矩陣θij(i=j=4,表示腿間相位關系)給定的相位關系生成。
綜上可知,四足機器人鶻關節擺動幅Ah可統一表示為
此膝關節的擺動幅值Ak為
Hopf 步態參數如表2 所示。
當四足機器人采用Walk 步態,且β=0.75,φRH=0.25,行走速度為0.3 m/s,步態周期為0.8 s,足端最大離地高度為0.02 m 時,計算求得機器人鶻關節擺動幅值為11.99°,膝關節擺動幅值為8.18°;當四足機器人采用Trot 步態,且β=0.5,φRH=0,行走速度為0.6 m/s,步態周期為0.4 s,足端最大離地高度為0.02 m 時,計算求得機器人鶻關節擺動幅值為7.96°,膝關節擺動幅值為8.18°。
在上述仿真參數設置下,利用 Matlab/Simulink 對所建立的CPG 控制系統進行數值仿真。當輪腿機器人采用Walk 步態時的關節控制曲線如圖6 所示,圖中LF、RF、RH、LH 分別為機器人的左前腿、右前腿、右后腿和左后腿。從圖6 可以看出,CPG 控制模型所輸出的控制曲線很快都能達到穩定振蕩,鶻關節控制曲線嚴格符合Walk 態的相位關系,各腿之間的相位差為1/4 周期,膝關節控制曲線滿足同腿膝鶻關節的運動關系,且反映前肘后膝式的關節配置形式。
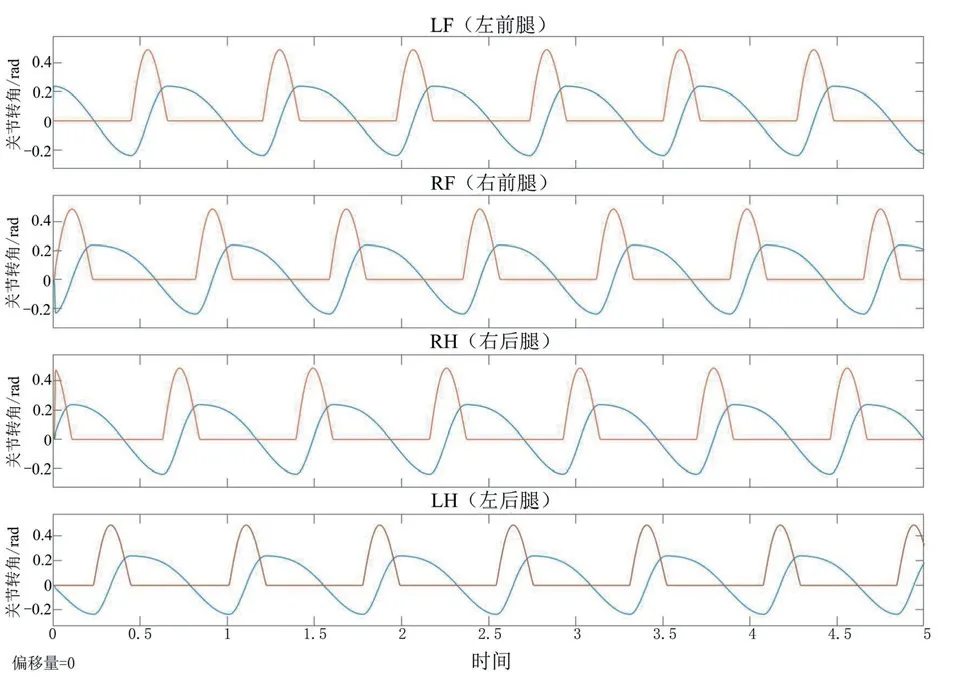
圖6 Walk 步態關節控制曲線
當輪腿機器人采用Trot 步態時的關節控制曲線如圖7 所示,骸關節控制曲線嚴格符合Trot 步態的相位關系,LF、RH 腿同相,RF、LH 腿同相。
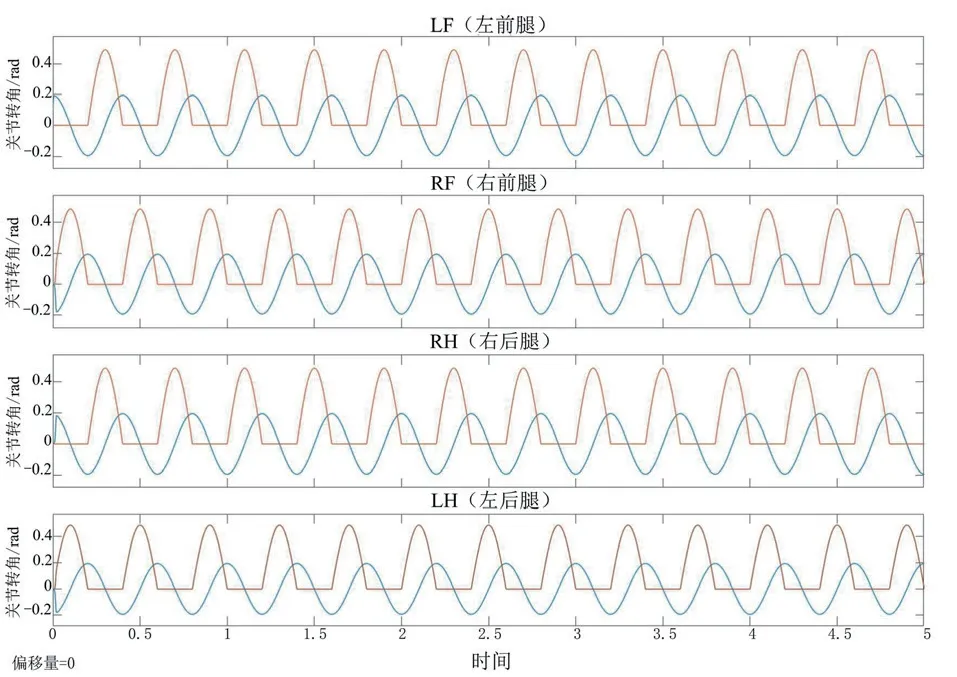
圖7 Trot 步態關節控制曲線
3.2 基于Simulink 的機器人控制信號輸出仿真
由于利用Simulink 的基本模塊運算速度慢,移植性差,不能有效地進行開發步態與ADAMS 聯合仿真,本項目組利用Simulink 的m-Function 模塊對上述模型進行改進,將模型中的大多數運算都替換成移植性與兼容性更高的Fcn 模塊(見圖8),實驗表明,更換后能顯著提高運行速度與控制的實時性。所以本項目組利用Fcn 代替Simulink 復雜模塊。
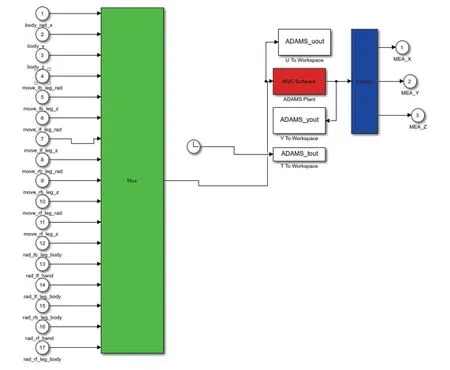
圖8 Fcn 模塊
3.3 機器人可操作性分析
機器人肢體的工作空間指在各關節轉角范圍內,肢體末端夾取裝置或足端可以到達的位置點的集合,反映了肢體的靈活性和可操作性。本文采用基于蒙特卡羅法的數值方法求解肢體工作空間,取大量的采樣點進行計算,通過正運動學求解,得到相應的末端位置,繪制大量末端位置點即可可視化機器人肢體的工作空間,其算法流程如圖9 所示。
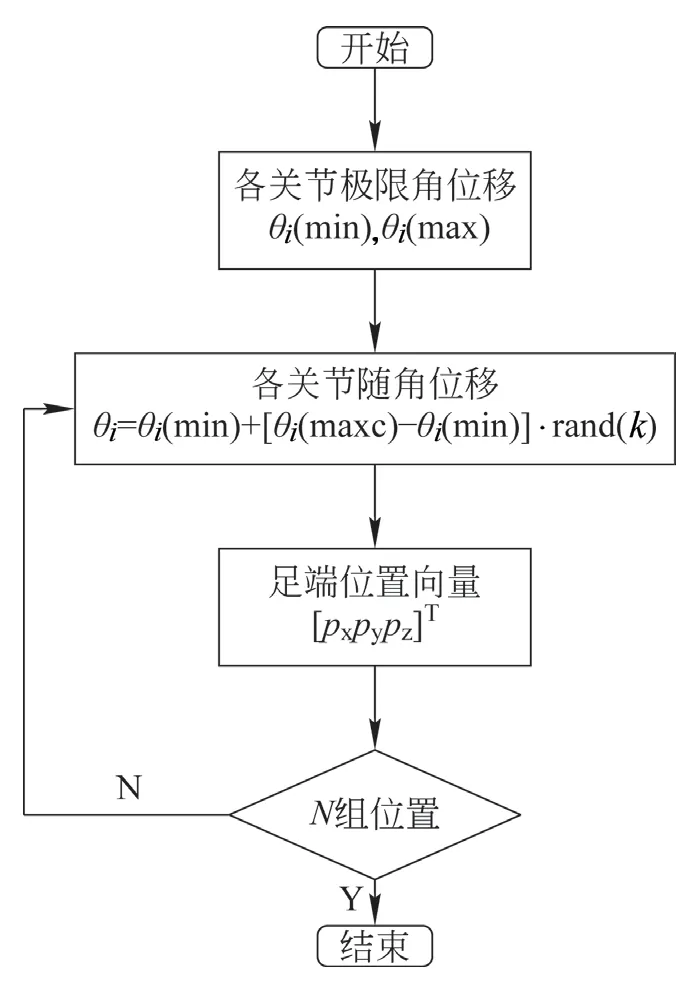
圖9 肢體工作空間算法流程圖
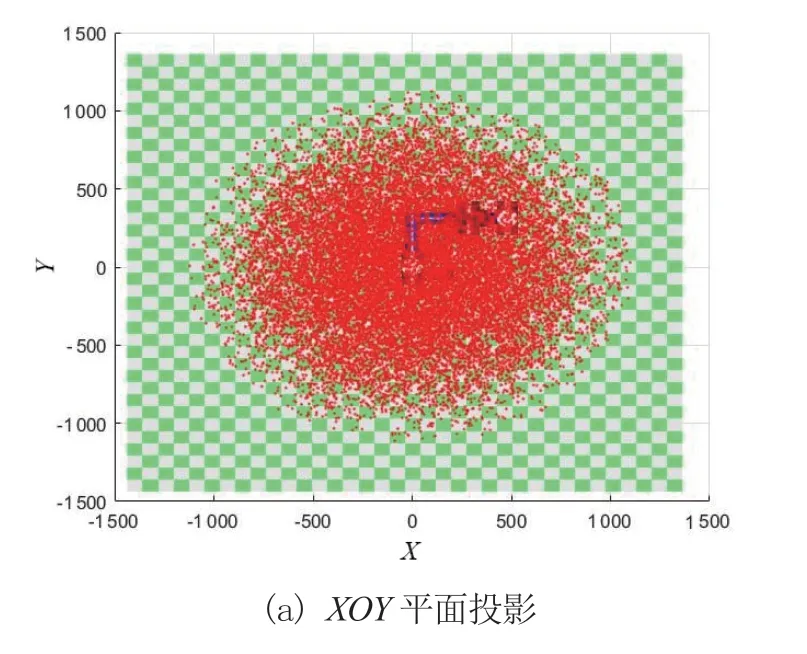
借助Matlab 軟件的計算和繪圖功能,取20 000 個隨機點,繪制肢體的工作空間如圖10 所示,可以得到X、Y、Z在空間坐標范圍分別為(-1 122.03,1 099.26)、(-1 111.86,1 122.87)、(-1 119.55,989.14)。肢體工作空間在不同平面內的投影和在三維空間中的集合可以為后續足式構型機器人步態的規劃以及足端軌跡曲線空間約束的確定提供參考。
4 結論
1)通過分析現有輪腿式和多模式機器人結構特點,提出了單肢具有三自由度的可重構輪腿式機器人的基本構型,并對機器人軀干布局、肢體構型、關節模塊以及足端抓取裝置進行了設計。
2)為適應不同的工況,提出了輪式移動構型、輪式操作構型和足式移動構型3 種工作構型,并對不同構型的特點進行了分析,對構型間的切換進行了規劃。對輪式構型機器人的2 種構型的特點和適用場景進行了分析;
3)對足式構型機器人的Walk 步態、Trot 步態、Pace 步態和Gallop 步態進行了仿真分析,并利用Matlab/Simulink 對所建立的 CPG 控制系統進行數值仿真,做出各種步態的關節運動曲線。
