慣性傳感器地面弱力測量系統熱設計
2023-12-01 06:00:46任麗敏陳立恒
中國光學 2023年6期
任麗敏,陳立恒 ,孟 旭,王 智
(1.中國科學院長春光學精密機械與物理研究所,吉林 長春 130033;2.中國科學院大學,北京 100049;3.中國科學院大學材料與光電研究中心,北京 100049;4.中國科學院大學 杭州高等研究院 基礎物理與數學科學學院,杭州 310024)
1 引言
空間引力波探測“太極計劃”[1-2]是由中國科學院牽頭提出的空間激光干涉引力波探測計劃,旨在探測頻率為0.1 mHz~1 Hz 的引力波信號[3]。慣性傳感器地面弱力測量試驗是中國空間引力波探測“太極計劃”發展規劃中的重要任務之一,其目的是通過在地面實驗室環境中搭建超高溫度穩定性熱環境,以滿足慣性傳感器敏感結構的溫度穩定性需求,驗證空間慣性傳感器的在軌工作性能。在引力波探測的低頻領域(毫赫茲及以下),溫度噪聲能以多種方式影響慣性傳感器的探測靈敏度。溫度及溫度梯度波動產生的溫度噪聲可能會淹沒被測信號。為了保證慣性傳感器的探測靈敏度,理論分析認為,在0.1 mHz~1 Hz 的測量頻帶內,“太極3 號”衛星慣性傳感器敏感結構的溫度穩定性要求優于10-5K/Hz1/2。因此,在慣性傳感器地面試驗中需要對測量系統進行熱設計,以保護慣性傳感器地面弱力測量試驗不受溫度噪聲的影響[4]。
目前,國內外已有較多有關精密熱控制的相關研究。在“LISA 探路者”衛星熱診斷系統的地面測試中,Lobo 等人提出了“絕熱體”系統概念。該系統可在實驗室環境下實現10-6K/Hz1/2的溫度穩定性[5]。Higuchi 等人研發了一種用于模塊化重力參考傳感器(MGRS)地面驗證測試的熱測試設備,在0.1 mHz~0.1 Hz 頻段內,該設備可提供優于30 μK/Hz1/2的熱穩定性[6]。“天琴1 號”衛星核心載荷區域采用高精度鉑電阻溫度傳感器和精密的熱設計,實現了每軌±3 mK 的溫度穩定性[7]。“太極1 號”衛星采用了“恒溫籠”的熱控制策略以及三級控溫方式,實現了衛星核心區域在軌飛行±5 mK/1 000 s 的溫度穩定性[8-9]。
當前,針對地面試驗的高精度、高穩定性溫度控制國外研究較多,國內大多以空間相機和空間載荷為主,相關研究較少。針對空間慣性傳感器地面弱力測量系統體積龐大,難以實現高精度、高穩定性熱控制這一問題,本文根據慣性傳感器地面弱力測量系統所處熱環境及內部熱功耗情況,結合國內外相關研究成果,對其進行了詳細的熱設計。然后,根據環境基準溫度水平定義了兩種熱分析工況,對整體結構進行了熱仿真分析。最后,通過熱仿真分析結果驗證了熱設計的合理性。
2 慣性傳感器地面弱力測量系統概述
2.1 系統組成
空間慣性傳感器在軌工作時,其核心部件測試質量(TM)在空間微重力環境下始終保持自由落體狀態。在地面試驗中,由于受到重力和大地脈動的影響,導致慣性傳感器無法完全正常工作。同時,空間慣性傳感器分辨率非常高,量程又遠小于重力加速度[10],因此采用了懸絲扭秤系統來抑制地球重力對測量的影響。慣性傳感器地面弱力測量系統結構如圖1 所示,測量系統整體安裝在結構尺寸為Φ2 500 ×3 800 mm 的立式圓柱體環境模擬器中,整個試驗過程均在真空環境下進行。
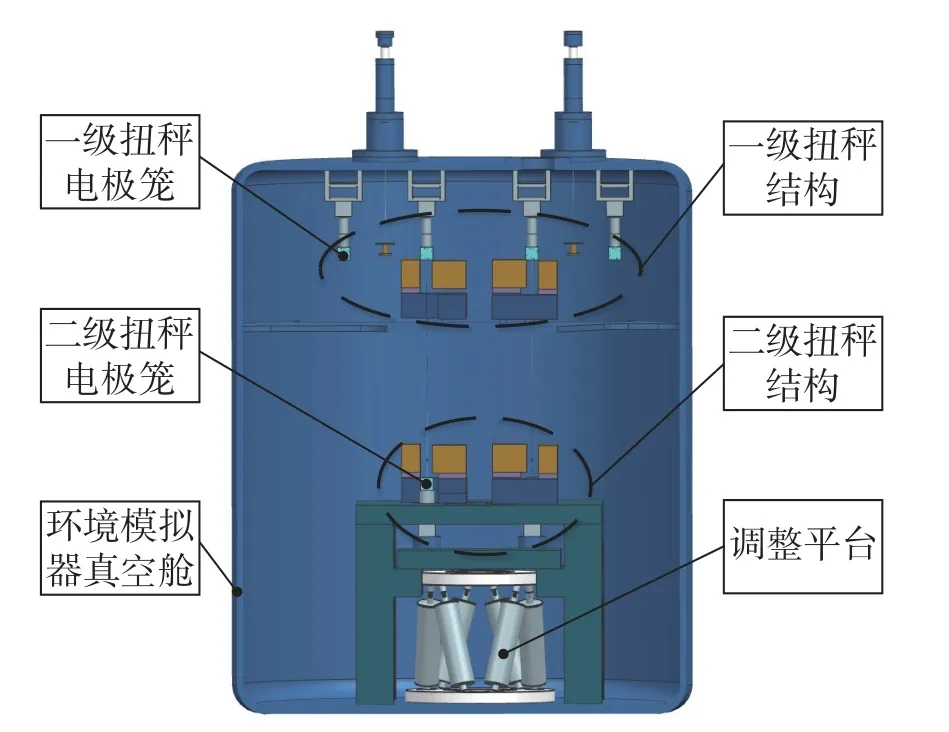
圖1 慣性傳感器地面弱力測量系統結構Fig.1 Overall structure of the ground weak force measurement system for inertial sensor
測量系統主要由一級扭秤結構、二級扭秤結構、五自由度調整平臺等部分組成。其敏感結構主要包括一級扭秤電極籠、二級扭秤電極籠及光學干涉儀平臺。環境模擬器系統主要包括真空艙、分子泵、離子泵等。
2.2 熱環境分析
為了減少環境擾動對慣性傳感器地面弱力測量系統的干擾,在地下10 m 的密閉實驗室環境中對測量系統及環境模擬器進行地面測試。
弱力測量試驗中影響弱力測量系統溫度穩定性的因素主要包括實驗室環境溫度的波動、內部熱源的發熱。密閉實驗室將為測量系統提供(289.15±0.5) K~(293.15±0.5) K 的環境溫度邊界,測量系統及熱控結構的內部熱源主要包括:離子泵、分子泵和五自由度調整平臺,各部分內熱源的發熱功耗如表1 所示,離子泵和分子泵在地面試驗過程中持續工作,五自由度調整平臺僅在最初1 小時內進行工作。
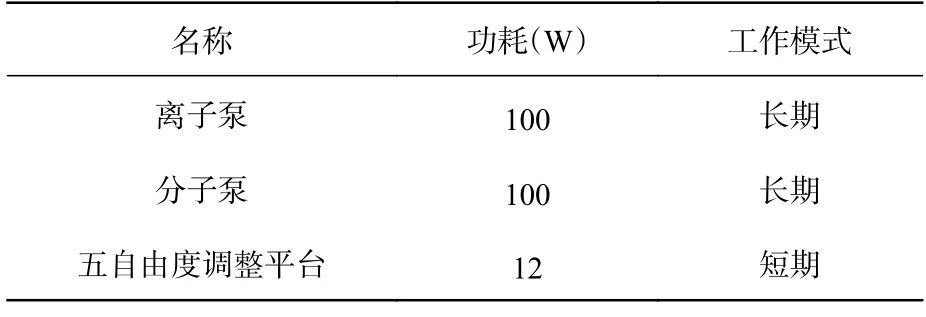
表1 測量系統內各熱源發熱功耗Tab.1 Thermal power consumptions of heat sources in measuring system
圖2 為測量系統敏感結構傳熱路徑示意圖,其描繪了實驗室熱環境及內部熱源與測量系統敏感結構之間的傳熱路徑。實驗室熱環境與隔熱層、隔熱層與真空艙之間通過空氣自然對流、熱輻射及熱傳導等方式進行熱量交換,而真空艙與測量系統組件及測量系統組件間的熱交換方式僅包括熱輻射及熱傳導。
3 慣性傳感器地面弱力測量系統熱設計
在真空試驗環境中,測試質量(TM)周圍的溫差波動會產生輻射計效應、輻射壓力效應、不對稱出氣效應[11]等溫度效應。這些溫度效應產生的熱噪聲是影響慣性傳感器測量靈敏度的重要干擾源。
為了滿足慣性傳感器的測量靈敏度需求,熱控設計指標要求慣性傳感器地面弱力測量系統敏感結構工作基準溫度為(293.15± 0.5)K。試驗過程中,在0.1 mHz~1 Hz 目標頻段內,要求測量系統的敏感結構溫度穩定性優于10-4K/Hz1/2。
在密閉實驗室環境中,環境的熱噪聲以高斯白噪聲形式作為溫度邊界輸入。為了降低環境溫度噪聲和內熱源對測量系統溫度穩定性的影響,采用了“主動熱控和被動熱控相結合”的熱控制方法,對測量系統進行整體熱設計,提出針對慣性傳感器地面弱力測量系統的詳細熱控方案,以滿足熱設計指標需求。
3.1 被動熱控系統設計
測量系統的熱控模型如圖3 所示。為了滿足慣性傳感器地面弱力測量系統高精度、高穩定性的熱控需求,采用了“三級熱控”結構進行整體熱設計。其中:一級熱控結構為密閉實驗室;二級熱控結構為鋁蜂窩板和聚苯乙烯板組成的隔熱層;三級熱控結構為環境模擬系統真空艙。

圖3 慣性傳感器地面弱力測量系統熱控結構示意圖Fig.3 Schematic diagram of the thermal control structure of the ground weak force measurement system for inertial sensor
3.1.1 一級熱控結構
密閉實驗室長、寬、高分別為7 000 mm、7 000 mm、5 000 mm。實驗室溫控系統將為整個實驗室環境提供289.15~293.15 K 的溫度邊界,同時環境溫度波動值小于等于±0.5 K。實驗室溫控系統將隔絕外部環境的溫度波動。同時,密閉環境將抑制空氣流動,減少二級熱控結構與環境的對流換熱,進一步降低測量系統整體溫度波動。
3.1.2 二級熱控結構
二級熱控結構由復合多層結構組成:內、外兩層由厚度為25 mm 的航空鋁蜂窩板組成,中間夾層為25 mm 厚的聚苯乙烯泡沫板,三層結構通過膠接方式復合形成一個整體熱隔離層,同時,在隔熱板連接處進行涂膠密封處理。鋁蜂窩板不僅保證了隔熱層的結構剛度,而且與板材相比,蜂窩狀結構可以更好地使環境溫度波動衰減。在此基礎上,聚苯乙烯泡沫層進一步降低溫度波動水平,尤其是在較低頻率范圍內,聚苯乙烯材料具有更強的隔熱效果。隔熱層整體外部結構輪廓尺寸為:5 000 mm×5 000 mm×4 300 mm,隔熱層與實驗室地面采用了4 個小平面進行隔熱安裝,安裝平面之間增加了20 mm 厚聚酰亞胺隔熱墊,并采用鈦合金螺栓進行固定,以減少二級熱控結構與實驗室地面之間的熱傳導。同時對二級熱控結構外層鋁蜂窩板外表面做拋光處理,保持紅外發射率ε≤0.1,減少二級熱控結構與實驗室環境的輻射換熱,進一步降低環境溫度波動對測量系統溫度穩定性的影響。
3.1.3 三級熱控結構
三級熱控結構(空間環境模擬器真空艙)為Φ 2 500×3 800 mm 的圓柱形不銹鋼真空罐,其壁厚為32 mm。真空艙內部熱沉表面涂覆黑漆以增大其紅外發射率,同時真空艙自身較大的熱容也會進一步減小溫度波動,進而為測量系統提供更好的溫度均勻性。真空艙采用“三點式”安裝方式,利用鈦合金螺栓直接與實驗室地面安裝平臺進行固定安裝,真空艙與安裝平臺之間采用200 mm厚度的聚酰亞胺隔熱墊隔熱安裝,以減少真空艙與安裝平臺之間的傳導換熱。環境模擬器配套設備分子泵和離子泵具有較大的長期發熱功耗,為了避免其對測量系統溫度水平與溫度穩定性的影響,采用恒溫水槽對分子泵和離子泵進行水冷散熱,保證泵體基準溫度為293.15 K,泵體溫度波動水平小于等于0.1 K。
3.1.4 測量系統熱控
在試驗過程中,測量系統組件處于真空狀態,其與真空艙的熱交換方式為熱傳導和熱輻射。測量系統一級扭秤電極籠通過懸掛支架、六自由度調整機構及調整架過渡板與真空艙進行傳導換熱。一級扭秤電極籠與測量系統中的可視組件及真空艙進行輻射換熱。一級扭秤懸掛支架與真空艙之間采用10 mm 厚度聚酰亞胺隔熱墊隔熱安裝,同時采用鈦合金螺栓進行固定,以隔絕真空艙與一級扭秤敏感結構之間的熱傳導。五自由度調整臺與弱力測量支撐平臺之間同樣采用聚酰亞胺隔熱墊進行隔熱安裝,以減少二級扭秤敏感結構與真空艙的熱傳導,最大限度減少環境溫度波動對測量系統溫度穩定性的影響。五自由度調整臺工作時間較短且功耗較小,測量系統的整體溫度水平將保持在可接受范圍內。慣性傳感器地面弱力測量系統熱控結構及測量系統部分結構材料選擇如表2 所示。
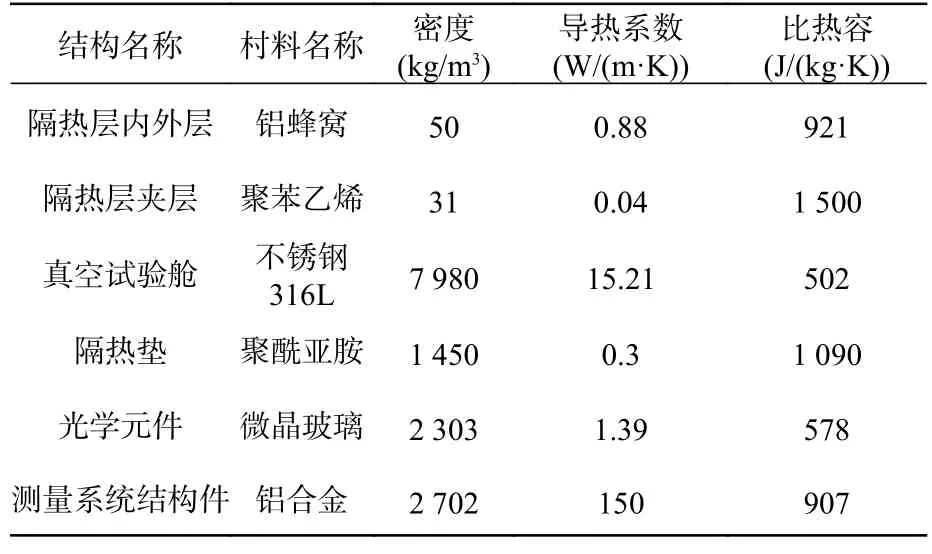
表2 熱控結構及測量系統部分結構材料表Tab.2 List of structural materials of thermal control structure and measuring system
3.2 主動熱控系統設計
慣性傳感器地面弱力測量系統的目標工作溫度為293.15 K,溫度穩定性要求為10-4K/Hz1/2。密閉實驗室環境的基準溫度水平為289.15~293.15 K。當慣性傳感器地面弱力測量系統溫度水平低于293.15 K 時,需采用主動加熱方式進行溫度補償,使其基準溫度達到目標溫度。同時由于實驗室溫控系統的控溫精度有限,在低頻范圍內,特別是在頻率遠低于0.1 mHz 的情況下,被動熱控措施的熱隔離效果將明顯變差,因此,需要采用主動熱控制系統提高測量系統整體控溫精度[12]。
3.2.1 主動熱控措施
采用上文提到的主動熱控措施,在二級熱控結構隔熱層內表面的側面與頂面進行主動加熱補償。考慮主動加熱回路的加熱面積較大,且溫度均勻性要求較高,因此選用片狀聚酰亞胺薄膜型電加熱器對二級熱控結構進行分區加熱。運用比例積分微分(PID)控制算法,通過控制各加熱回路的電壓來調節加熱片的加熱功率,對二級熱控結構內層鋁蜂窩板的溫度波動進行快速細微調控,使其基準溫度滿足測量系統的目標溫度需求,同時降低環境溫度波動水平。
對二級熱控結構建立溫度變化模型,當主動加熱回路不工作時,第二級熱控結構內表面溫度變化曲線為:
其中,Tnoise表示環境噪聲。
在該試驗方案中,通過簡化傳熱模型,得到單位時間溫度增量ΔT與加熱片輸入電壓之間的關系:
其中:ΔT為單位時間內二級熱控結構溫度增量;U為加熱片加熱回路電壓(變量);R為加熱片電阻;cp1為二級熱控結構材料的比熱容;cp2為加熱片比熱容;m1為二級熱控結構質量;m2為加熱片質量;95%為熱仿真中的設定參數,為考慮熱量耗散后用于地面弱力測量系統加熱升溫的熱量比例。
由此可得,二級熱控結構內層溫度隨時間的變化關系為:
3.2.2 PID 控制算法
溫度控制具有大慣性、大時滯、參數時變、過程非線性等特點,傳統的溫控方法難以滿足如此高精度的控溫需求。本文采用PID 控制算法。PID 控制算法的控溫原理如圖4 所示。
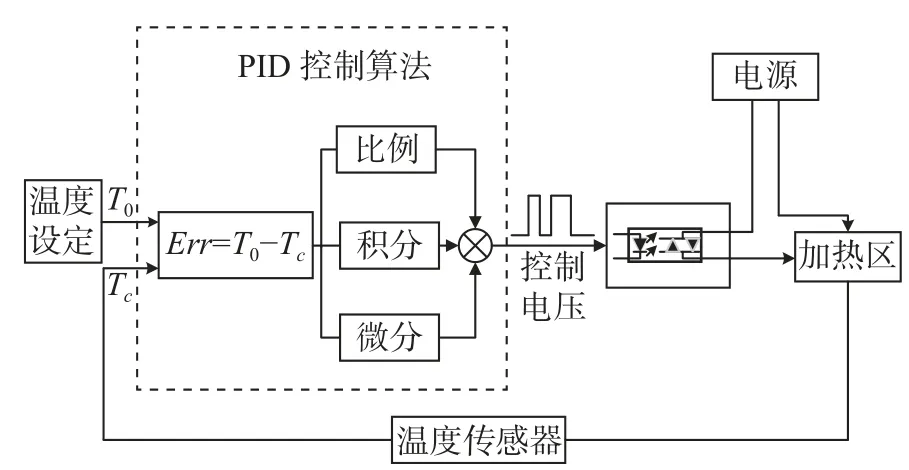
圖4 PID 控制原理圖Fig.4 Schematic diagram of PID control principle
在對慣性傳感器地面弱力測量系統進行主動熱控制時,采用位置式PID 控制算法。控制系統直接輸出控制量,控制系統的原理可表示為[13-15]:
式中:Kp是比例系數;TI是積分常量;TD是微分時間常數;Ts是采樣時間;e(t)是t時刻設定溫度與實際測量溫度的差值;T0是被控對象的目標溫度;Tc是被控對象實際測量溫度;u(t)是t時刻主動補償加熱功耗。
在慣性傳感器地面弱力測量系統主動熱控回路中,采用功率限幅設計,當控制量u(t)大于功率限幅時,則u(t)以功率限幅值輸出,當u(t)?0 時,則取u(t)=0。
PID 控制算法的參數整定是通過調整控制器的參數Kp、TI、TD,使得控制回路的動態特性滿足溫度控制指標要求,以達到理想的控制目標。本文采用了試湊法對PID 控制算法進行參數整定,通過觀察過程曲線的變化修改參數,直到獲得理想的控制回路的動態特性[14]。試湊時一般根據各參數的特點,對參數實行先比例、后積分、再微分的步驟進行整定,最終選取PID 控制參數Kp=50,TI=0.001,TD=150。
4 熱控系統仿真分析
為了驗證慣性傳感器地面弱力測量系統熱設計的正確性與合理性,采用有限元分析法(FEA)對測量系統和熱控結構進行熱仿真分析。根據仿真結果,不斷優化和調整熱控方案,以實現最佳熱設計方案。
4.1 熱分析模型
在本研究中,利用UG/NX 有限元分析軟件建立了測量系統與熱控結構的整體熱分析模型,如圖5 所示。
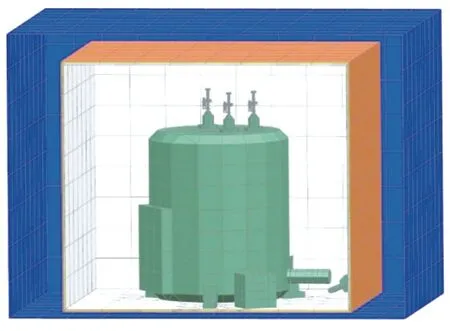
圖5 慣性傳感器地面弱力測量系統有限元模型Fig.5 Finite element model of the ground weak force measurement system for inertial sensor
為了提高熱分析效率,在不影響傳熱路徑的情況下對熱分析模型進行了如下簡化:
(1) 對薄壁結構的組件使用殼體單體進行簡化,單元厚度按照體積等效厚度計算;模型共劃分了32 762 個單元。
(2) 在建模過程中,采用熱耦合簡化了部件之間的熱傳導,熱分析模型中共建立了74 個熱耦合。
根據能量守恒定律,建立了集總參數模型,慣性傳感器地面弱力測量系統熱平衡方程:
其中:Q為系統的內部能量增量;Qcv為對流換熱量;Qcd為傳導換熱量;Qr為輻射換熱量;Qh為內熱源產生的熱量;其單位均為W。整體結構熱分析模型由一系列的單元和節點組成。假設熱模型單元的質量和熱容量集中在單元節點上,則任意節點i的熱平衡方程可以表示為:
其中:Cp,i和mi表示節點i的比熱容和質量;Qe,i表示節點i與環境的熱量交換:Qi表示節點i自身產生的熱量;Dij表示節點i與節點j之間的傳導換熱系數;Eij表示節點i與節點j之間的輻射換熱系數;Ti,Tj分別表示節點i,j的溫度;m,n分別表示與節點i進行傳導換熱和輻射換熱的節點數量。節點i與環境的熱量交換可以表示為:
其中:σ為斯特藩-玻耳茲曼(Steven-Boltzmann)常數;F表示輻射角系數;ε、Ai、ΔTi分別表示節點i的紅外發射率、表面積和節點與環境的溫度差;h表示對流換熱系數。
4.2 熱分析工況
測量系統敏感結構的溫度穩定性主要受密閉實驗室環境溫度、內熱源以及主動熱控加熱回路的影響,同時實驗室環境的空氣對流換熱強度、各級熱控結構表面的熱屬性等因素都將對其造成影響。
熱仿真考慮實驗室環境溫度邊界的兩種極端情況,將實驗室基準溫度為289.15 K 和293.15 K時分別定義為低溫工況和高溫工況。同時為了驗證主動熱控系統的有效性,對高溫工況無主動熱控措施下的弱力測量系統進行了熱仿真分析。實驗室環境溫度邊界以高斯白噪聲形式作為輸入,噪聲曲線在每一采樣點處的溫度值均服從高斯分布,其溫度均值μ為密閉實驗室基準溫度,其標準差σ≤0.5/3,即保證實驗室溫度邊界的溫度值分布在(μ-0.5,μ+0.5)中的概率為99.74%,圖6(a)、6(b)(彩圖見期刊電子版)分別表示高溫工況和低溫工況時實驗室的溫度邊界曲線。

圖6 實驗室溫度邊界曲線。(a)高溫工況;(b)低溫工況Fig.6 Laboratory temperature boundary curve.(a) High temperature condition;(b) low temperature condition
在熱仿真過程中,除了實驗室環境溫度邊界輸入條件不同外,其他初始設定條件均相同。一級熱控結構實驗室墻壁表面的熱特性設置為ε1=0.8;二級熱控結構拋光鋁合金表面的熱特性設置為ε2=0.1;二級熱控結構內表面及真空艙外表面的熱特性ε3=0.2;真空艙內部熱沉的熱特性為ε4=0.92。在一級熱控結構與二級熱控結構之間,以及二級熱控結構與真空艙之間設置自然對流換熱,對流換熱系數為h=10 W/(m2·(°C))。同時,主動熱控系統設置控溫目標為293.15 K,PID 控制器控制參數Kp=50,TI=0.001,TD=150。若在上述兩種工況下慣性傳感器地面弱力測量系統的溫度穩定性能滿足相關要求,則表明在前述任意溫度邊界條件下該熱控措施均能滿足地面弱力測量熱設計需求。
4.3 熱分析結果
根據上述高溫工況和低溫工況的定義,在主動熱控與被動措施兩種條件下對兩種工況進行了瞬態熱分析和計算,并針對一級扭秤電極籠溫度穩定性結果進行分析。高溫工況和低溫工況時,實驗室流體環境與測量系統初始溫度分別設定為293.15 K 和289.15 K。
圖7(a)所示為高溫工況下熱分析計算中一級扭秤電極籠的溫度變化曲線。由于三級被動熱控結構具有良好的隔熱效果,同時主動熱控系統提供了溫度補償,一級扭秤電極籠在熱仿真分析開始625 000 s 后逐漸趨于平衡。圖7(b)所示為一級扭秤電極籠在瞬態分析平衡后24 h 內的溫度曲線,從曲線中可以看出一級扭秤電極籠平均溫度為293.147 447K,其最大溫度變化值ΔTh=1.2×10-5K。同時對平衡后24 h 內的溫度曲線進行了頻域轉換,具體如圖8 所示,一級扭秤電極籠在24 h 內溫度變化的均方根譜密度(振幅譜密度,ASD)表征了一級扭秤電極籠在頻域內的溫度穩定性。從曲線中可以看出,在0.1 mHz~1 Hz 的測量頻帶內,一級扭秤電極籠溫度穩定性優于10-4K/Hz1/2。
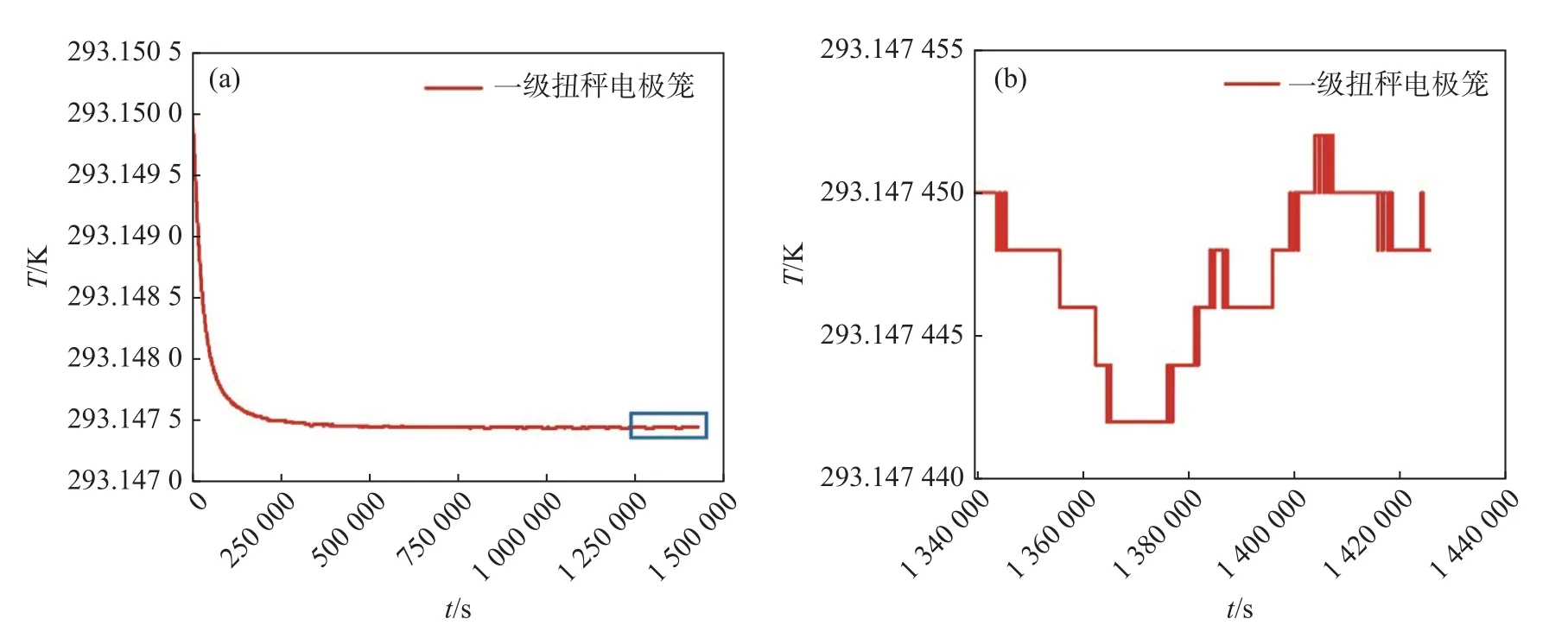
圖7 高溫工況敏感結構溫度變化曲線。(a)一級扭秤電極籠整體溫度變化曲線;(b)一級扭秤電極籠24 h 溫度變化曲線Fig.7 Temperature curves of the sensitive component under high temperature condition.(a) Overall temperature change curve and (b) the temperature change curve in 24 h of the electrode housing of primary torsion balance
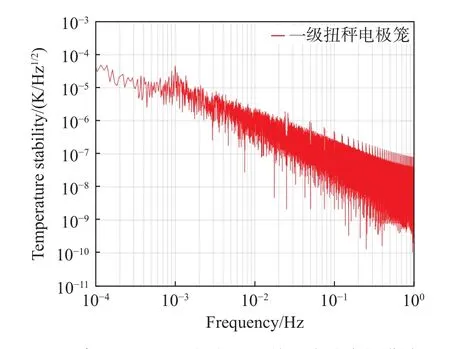
圖8 高溫工況一級扭秤電極籠溫度穩定性曲線Fig.8 Temperature stability curve of the electrode housing of primary torsion balance under high temperature condition
圖9(a)所示為低溫工況下熱分析計算中一級扭秤電極籠的溫度變化曲線。在主動熱控制系統的加熱補償作用下,一級扭秤電極籠溫度水平由低溫工況初始溫度值不斷上升,并最終達到了平衡狀態。圖9(b)所示為一級扭秤電極籠在瞬態分析平衡后24 h 內的溫度曲線,從圖9(b)可以看出一級扭秤電極籠平均溫度為292.943 001 K,其最大溫度變化值ΔTc=1.6×10-5K。同時,對平衡后24 h 內的溫度曲線進行頻域轉換。圖10為一級扭秤電極籠在24 h 內溫度變化的振幅譜密度。從圖10 可以看出,在0.1 mHz~1 Hz 的測量頻帶內,一級扭秤電極籠溫度穩定性優于10-4K/Hz1/2,滿足熱控指標需求。上述熱分析結果表明,在不同的熱分析工況下,熱控制系統均能夠保證慣性傳感器地面弱力測量系統的敏感結構溫度穩定性。
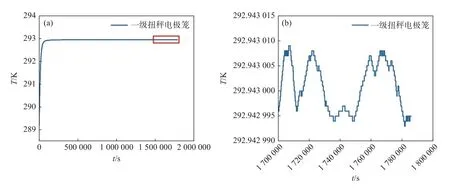
圖9 低溫工況敏感結構溫度曲線。(a) 一級扭秤電極籠整體溫度變化曲線;(b) 一級扭秤電極籠24 h 溫度變化曲線Fig.9 Temperature curves of the sensitive component under low temperature condition.(a) Overall temperature change curve and (b) the temperature change curve in 24 h of the electrode housing of primary torsion balance

圖10 低溫工況一級扭秤電極籠溫度穩定性曲線Fig.10 Temperature stability curve of the sensitive component under low temperature condition
在高溫工況時無主動熱控條件下熱仿真計算中一級扭秤電極籠的溫度變化曲線如圖11(a)所示。在僅有被動措施的條件下,一級扭秤電極籠溫度水平由初始值逐漸下降并最終達到了平衡狀態。圖11(b)所示為一級扭秤電極籠在瞬態分析平衡后24 h 內的溫度曲線。從圖中可以看出一級扭秤電極籠平均溫度為293.099 884 K,其最大溫度變化值ΔTc=4.33×10-4K。同時對平衡后24 h 內的溫度曲線進行了頻域轉換,如圖12 所示為一級扭秤電極籠在24 h 內溫度變化的振幅譜密度。從圖12 可以看出,在0.1 mHz~1 Hz 的測量頻帶內,一級扭秤電極籠溫度穩定性優于5×10-3K/Hz1/2。對比上述熱分析結果可以看出,在被動熱控措施的基礎上增加主動熱控措施,可以更有效地抑制慣性傳感器敏感結構的溫度波動,使系統獲得更高的溫度穩定性。
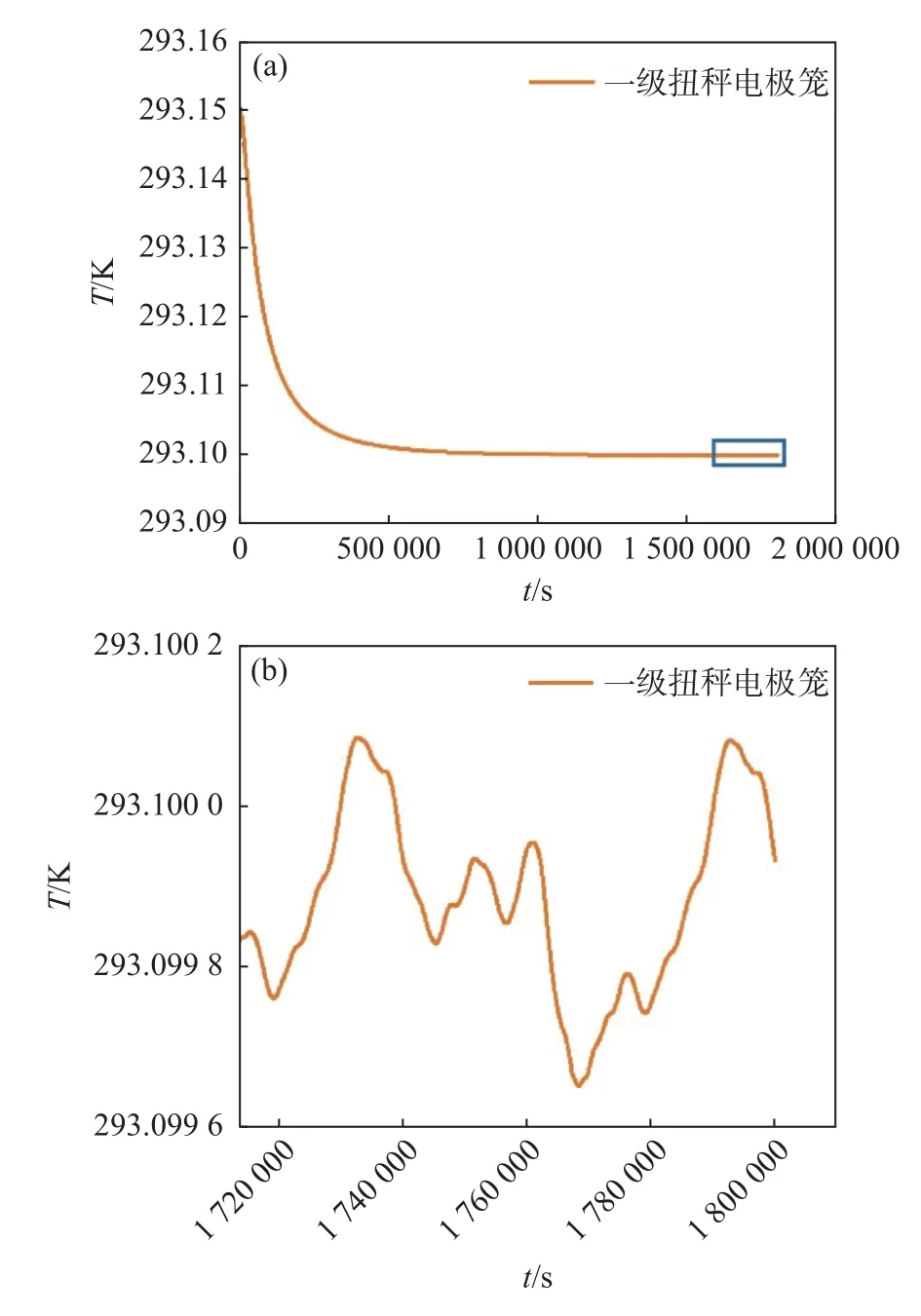
圖11 高溫工況無主動熱控條件下敏感結構溫度曲線。(a) 一級扭秤電極籠整體溫度變化曲線;(b) 一級扭秤電極籠24 h 溫度變化曲線Fig.11 Temperature curve of sensitive component under high temperature condition without active thermal control.(a) Overall temperature change curve and(b) temperature change curve in 24 h of the electrode housing of primary torsion balance
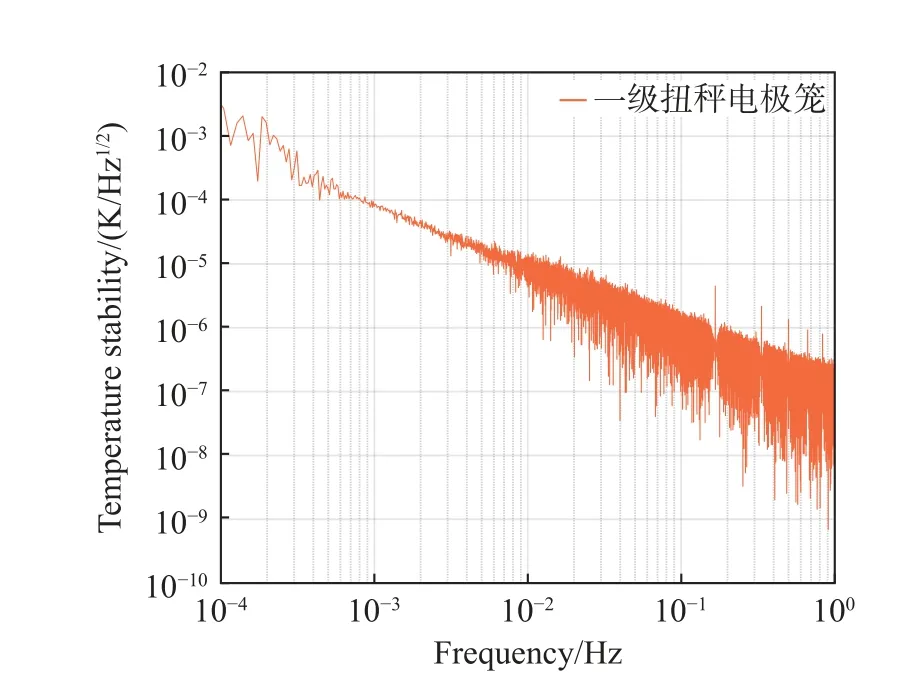
圖12 高溫工況無主動熱控條件下一級扭秤電極籠溫度穩定性曲線Fig.12 Temperature stability curve of the sensitive component under high temperature condition without active thermal control
5 結論
本文根據慣性傳感器地面弱力測量系統的工作環境和溫度穩定性需求,充分利用導熱、隔熱、散熱等被動熱控措施,輔以PID 算法控制的補償電加熱回路,設計了一套基于分級結構和PID 控制算法相結合的高精度熱控制系統。考慮慣性傳感器地面弱力測量系統所處的熱環境,利用熱仿真軟件針對其高溫工況和低溫工況兩種極端條件進行了瞬態分析計算,并將一級扭秤電極籠平衡后24 h 的溫度曲線進行頻域轉換。分析結果表明,不同的工況下,在0.1 mHz~1 Hz 目標頻段內,慣性傳感器地面弱力測量系統敏感結構溫度穩定性均優于10-4K/Hz1/2。結果表明該熱控制系統能滿足慣性傳感器地面弱力測量系統的控溫需求,驗證了熱設計的合理性。本研究為慣性傳感器地面弱力測量試驗的高精度、高穩定性熱控需求提供了解決方案,同時對相關地面設備的精密熱控研究也具有一定的參考價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
哲學評論(2021年2期)2021-08-22 01:53:34
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中華詩詞(2019年7期)2019-11-25 01:43:04
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
影視與戲劇評論(2016年0期)2016-11-23 05:26:01

- 中國光學的其它文章
- InGaAs/AlGaAs quantum well intermixing induced by Si impurities under multi-variable conditions
- Orbital-angular-momentum spectra in coherent optical vortex beam arrays with hybrid states of polarization
- The influence of the number of coupling regions on the output of the ding-shaped microring resonator
- A sliding-mode control of a Dual-PMSMs synchronization driving method
- Polarization-multiplexing of a laser based on a bulk Yb:CALGO crystal
- Compact voice coil deformable mirror with high wavefront fitting precision