深大基坑自動化監測及智能預警平臺
2023-12-08 14:37:12何烈民崔春雨王思瑞張乾青郭慧強高鵬
科學技術與工程 2023年31期
何烈民, 崔春雨, 王思瑞, 張乾青, 郭慧強, 高鵬
(1. 山東省路橋集團有限公司, 濟南 250014; 2. 山東大學,巖土與結構工程研究中心, 濟南 250061)
隨著城市空間日趨緊張,城市建設不斷向高空和地下爭取空間[1],基坑開挖規模、深度和復雜程度也不斷增大[2]。近年來基坑事故頻發,不僅帶來了經濟損失,也威脅到了作業人員的安全[3-5],對基坑穩定性分析提出了更高的要求。針對基坑穩定性分析現有主要方法包括以下三種:①理論分析法[6-7],該方法較為方便,但由于地下巖土體的復雜性,理論計算通常不能較好地反映基坑的實際受力與變形情況。②數值模擬法[8-9],現階段已有許多研究人員通過數值模擬的方法進行基坑穩定性分析。數值模擬計算中存在因參數選取或本構關系選取不準確而導致計算結果與實際情況不相符的問題。③現場監測法[10-11],基坑現場監測是判斷基坑穩定性和預測基坑變形發展趨勢最直觀、最有效的方法。通過對現場數據的分析,可為基坑開挖的合理性提供依據。
深基坑現場監測中傳統人工監測方法易存在監測不及時、精度低、監測數據少、不能提供實時監測數據等問題。基坑自動化、智能化監測以其高精度、實時性等優點已成為基坑穩定性分析中高效的方法[12],基坑智能化監測已成為熱點研究問題。曹權等[13]采用多組自動全站儀測站與計算機終端相聯系,組成了高效率、高精度的地鐵隧道監測系統;申文靜[14]將建筑信息模型(building information modeling,BIM)與物聯網(internet of things,IoT)技術相結合,提高了監測預警信息的完整性與交互性,并克服了監測數據滯后的缺點;梁玄等[15]采用TCA2003全站儀自由設站基坑水平監測系統實現了基坑水平位移的監測;吳振君等[16]利用地理信息系統(geographic information system,GIS)可視化技術實現了區域內多個基坑地質條件、監測數據、監測儀器等資料的采集;徐文杰等[17]提出了數字基坑系統理念,并開發出非線性預測功能;樊延祥等[18]通過開發Revit提出了基于條件信息熵的綜合評價方法,對基坑某區域進行了綜合風險評估。
現應用載有全球導航衛星系統的基坑位移監測儀器對基坑的坑外地表沉降進行監測,采用固定式測斜儀、鋼筋計、表面應變計結合無線智能采集儀對樁體水平位移和支撐軸力進行監測,開發了基坑智能預警平臺。相關研究成果可為基坑穩定性分析及預測提供新方法,對類似工程具有指導意義。
1 工程背景
本工程為湖北省武漢市江岸區諶家磯大道地下通道,地下通道整體均采用明挖方式施工,長度2.21 km,基坑深度0.9~24.6 m。由于該基坑工程因深度不同,采用了三種不同的支護形式。S2+200~S2+325區間為放坡開挖,掛網噴射混凝土,S2+325~S4+330.7區間為φ850型鋼水泥土攪拌墻(SMW工法樁)+內支撐、鉆孔灌注樁+三軸攪拌止水帷幕+內支撐和鉆孔灌注樁+銑削深層攪拌技術(cutter soil mixing,CSM)落地式止水帷幕。支撐類型按深度不同設置2~4道支撐,其中第一、三道采用混凝土支撐,第二、四道采用鋼支撐。基坑代表性支護剖面如圖1所示。
地勘報告顯示,基坑開挖深度范圍內主要為黏土、粉質黏土,下伏基巖為泥質粉砂巖、白云巖、鈣質粉砂巖和鈣質礫巖。地下水類型主要為上層滯水、孔隙承壓水、基巖裂隙水和巖溶水。上層滯水主要賦存于沿線填土層中,上層滯水水位在1.2~3.4 m,孔隙承壓水水位隨長江季節性水位變化而變化,基巖裂隙水與巖溶水埋藏較深對本工程影響不大。基坑土層物理力學參數如表1所示。
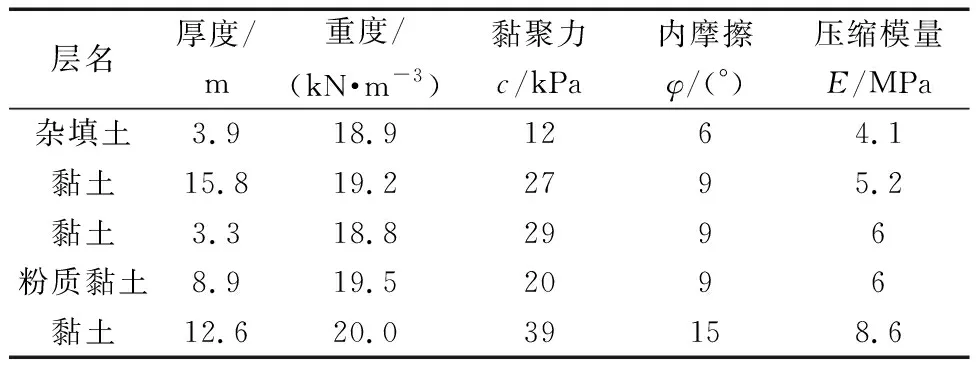
表1 基坑土層物理力學參數Table 1 Physical and mechanical parameters of foundation pit soil layer
2 自動化監測內容及方法
根據工程現場情況選取有代表性的三處斷面開展監測工作,監測項目包括:樁體水平位移監測、坑外地表沉降監測和支撐軸力監測,監測斷面信息如表2所示。
監測斷面具體位置如圖2所示,其中坑外地表沉降分別在距坑邊5 m、10 m和15 m處設置監測點,對應圖1中每個斷面處的3個點位。
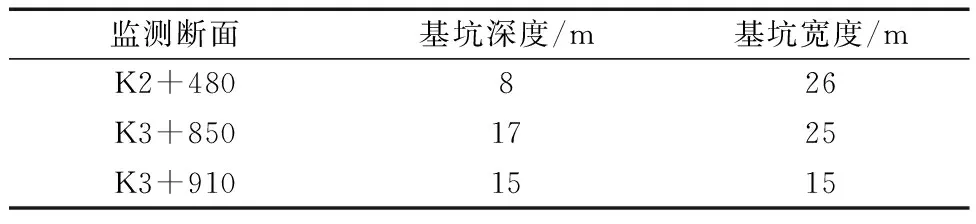
表2 監測斷面信息Table 2 Monitoring section information
2.1 監測元件
2.1.1 樁體水平位移監測
采用JTM-U6000K型固定式垂直測斜儀與JTM-G7600A型高精度測斜管監測基坑圍護結構樁體的水平位移(見圖3)。JTM-U6000K型固定式垂直測斜儀的綜合分辨率為0.001°工作溫度為-25~+85 ℃,極限工作溫度為-55~+125 ℃。
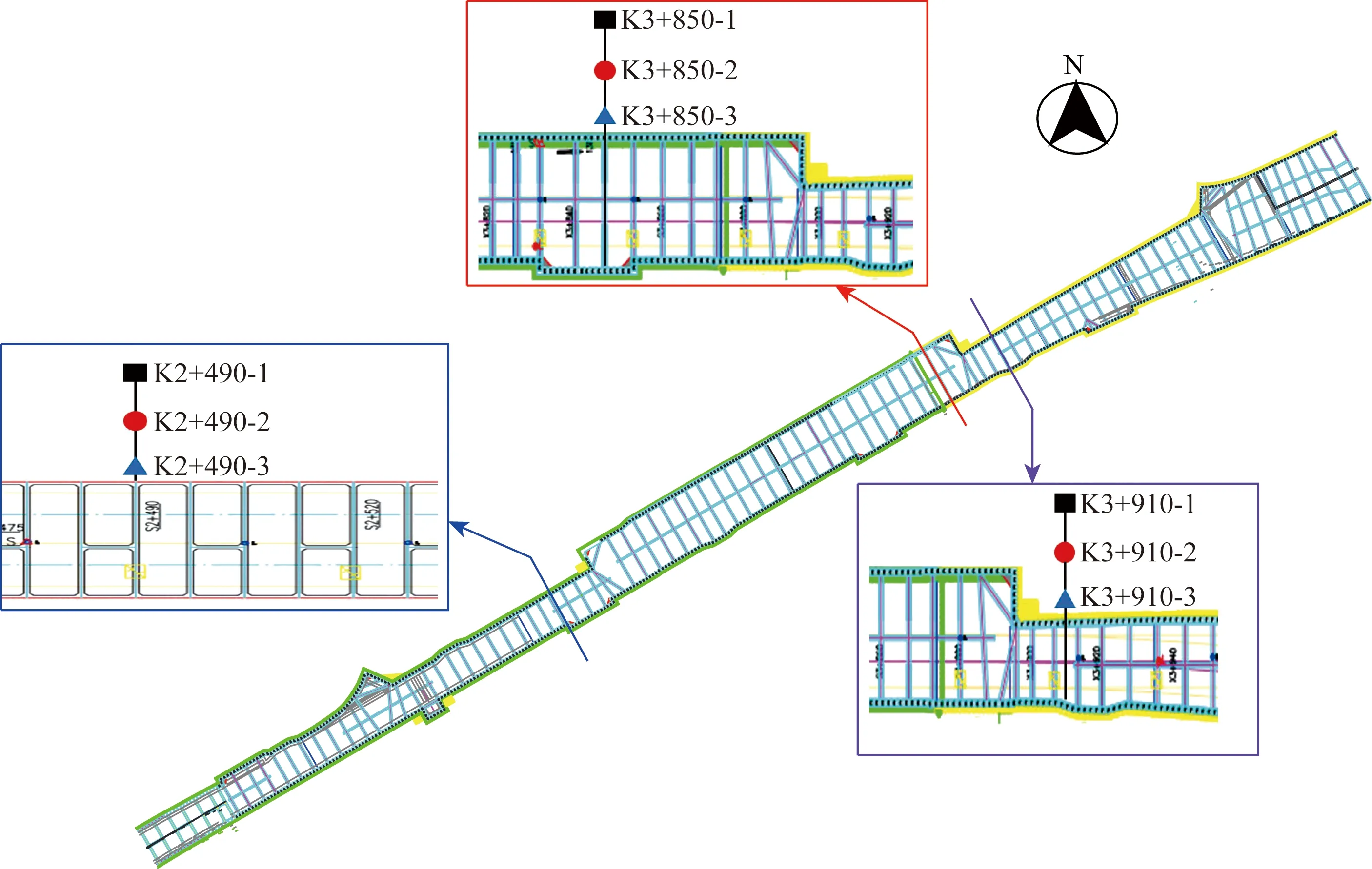
圖2 監測斷面示意圖Fig.2 Diagram of monitoring plane
2.1.2 坑外地表沉降監測
坑外地表沉降監測儀器為司南-A300型全球導航衛星系統(global navigation satellite system,GNSS)接收機如圖4(a)所示。該接收機基于GNSS高精度定位技術及低功耗高精度GNSS芯片,融合微機電系統(microelectro mechanical systems,MEMS)傳感器技術、窄帶通信技術等,可自動切換工作模式,減少監測站系統功耗和運維成本。為監測工作的正常運行,司南-A300型普適型GNSS接收機需與控制器、電池、太陽能板、混凝土底座、立柱、避雷針配合使用,如圖4(b)所示。
2.1.3 支撐軸力監測
由于基坑內支撐采用兩種材料形式,針對支撐材料的不同,混凝土支撐與鋼支撐分別采用鋼筋計與表面應變計進行支撐軸力的監測,如圖5所示。
2.2 采集裝置
采用無線智能采集儀進行數據的自動采集,如圖6所示。該采集儀自帶存儲芯片,可將采集到的數據可方便和安全地存儲在采集器的內存中。在固定式測斜儀、鋼筋計等監測元件與采集儀進行連接之后,相關數據首先傳輸至采集儀中儲存。

圖5 支撐軸力監測元件Fig.5 Axial force monitoring equipment

圖6 無線智能采集儀Fig.6 Wireless intelligent acquisition device
無線智能采集儀內部采用模塊化設計,將不同監測元件接入不同的采集模塊,綜合采集各類傳感器數據。考慮到采集儀自身的耗電功率較小,選擇太陽能供電方式適用于現場復雜條件下的數據采集。數據采集之后,統一由內置4G/LTE傳輸終端傳輸到上位機并進行遠程處理。
3 基坑智能預警平臺
自動化監測可實時采集大量數據,對基坑未來發展趨勢的做出判斷。開發了基于動態變形預測的智能預警平臺,智能預警平臺將工程數據可視化,通過圖表、圖形、地圖等視覺元素,將數據中所蘊含的信息展現出來;并通過動態預測模型推算未來變形狀態,在潛在災害出現苗頭時提前知曉,及時調整施工方案。
3.1 基坑智能預警平臺框架
平臺的整體框架通過不同的信息感知模式,將獲取的信息經過有效的信息傳輸與加工,接入智能預警平臺的數據庫中,如圖7所示。
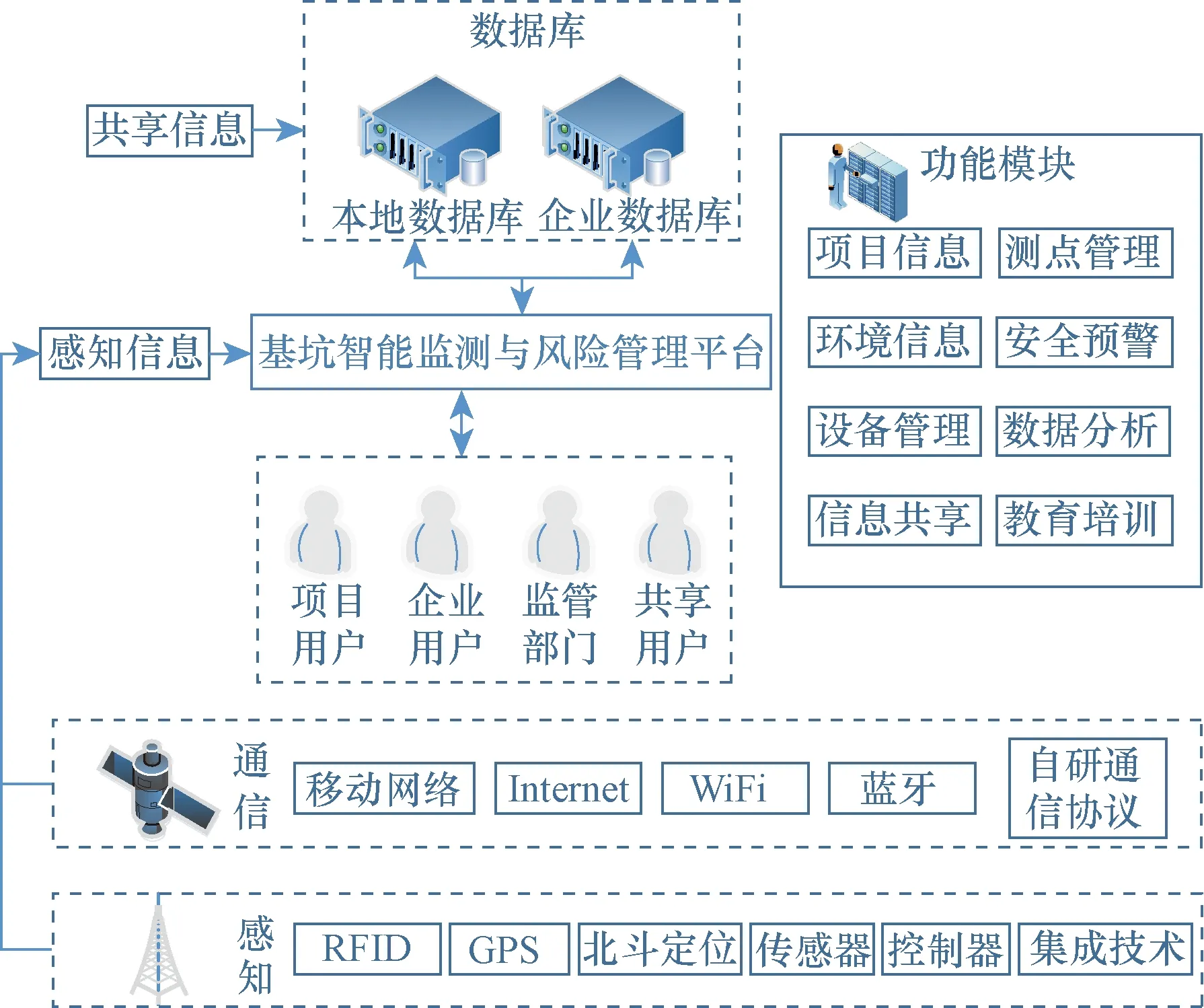
圖7 智能預警平臺整體框架Fig.7 Framework of intelligent early warning platform
3.2 智能預警平臺的實現
智能預警平臺的邏輯架構實現過程如圖8所示。使用采集裝置將測斜、水位、雨量以及鋼筋應力、裂縫等數據,通過消息列隊傳輸協議(message queuing telemetry transport, MQTT)或者遠距離無線電組網(long range radio, LoRa)傳輸到云端服務器;同時GNSS表面位移設備經過解算軟件計算后,也將數據通過超文本傳輸協議(http)傳輸給云端服務器。采用SpringCloud微服務架構對每個業務單獨開發、分布式部署,并將數據傳遞給EMQ (Erlang/Enterprise/Elastic MQTT Broker,基于 Erlang/OTP 平臺開發的開源物聯網 MQTT 消息服務器)數據中心處理,數據中心會查詢出平臺上已經配置好的傳感器計算公式,通過公式將原始數據計算成對應的物理量存儲到Postgresql數據庫中,通過圖表、圖形的形式在數據大屏展示出來。將基坑自身參數、支護結構、開挖方案等樣本分類,載入MATLAB中對模型進行網格訓練,得到輸出結果,再結合實際監測值進行參數反算以獲得更為準確的預測值,最終建立動態預測模型。
基坑智能預警平臺操作系統為Windows 10 64位專業版,測試瀏覽器為Google Chrome。針對于編寫現代Web和云應用的跨平臺源代碼編輯器,可在桌面上運行,并且可用于Windows, macOS和Linux。
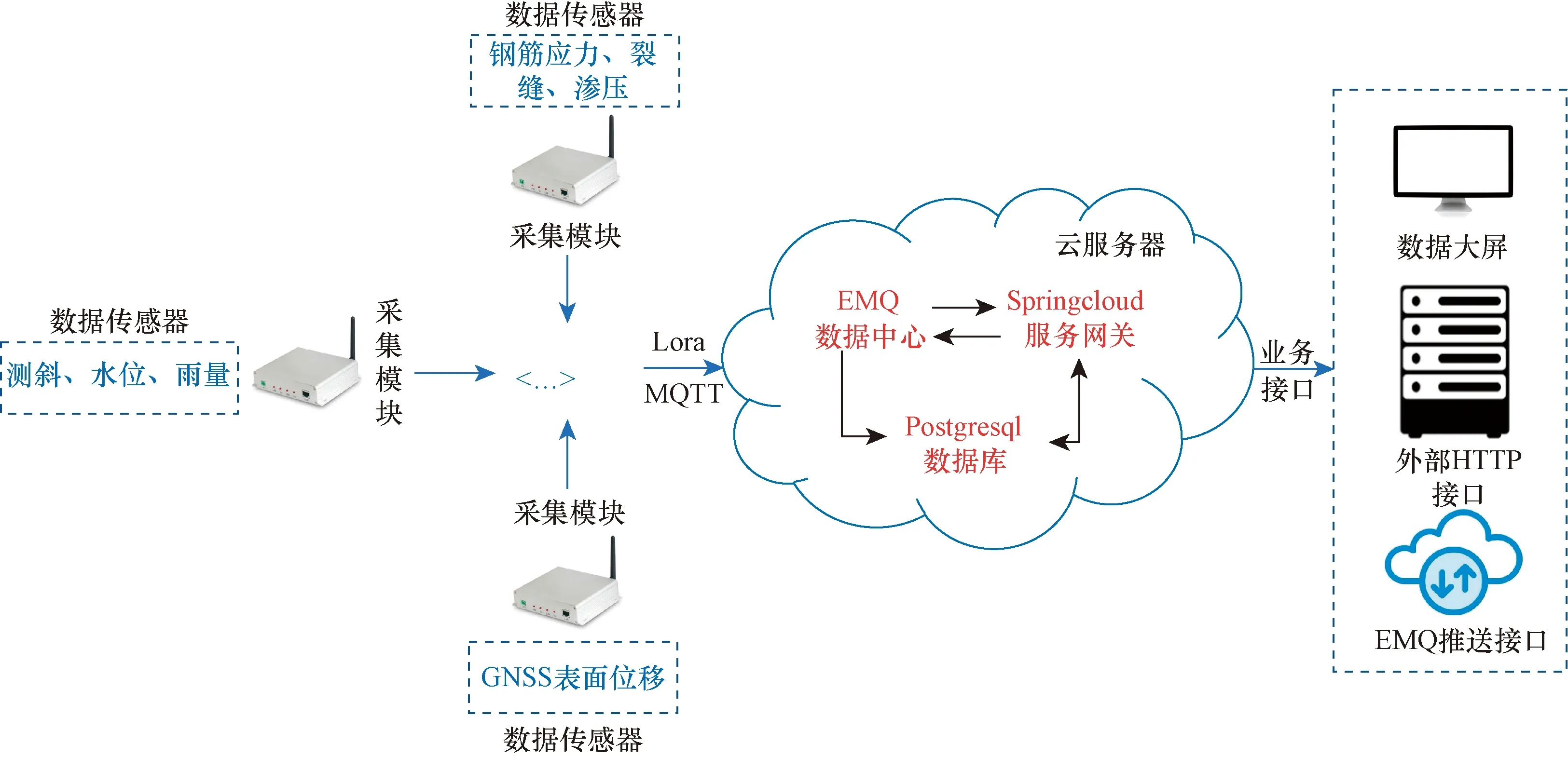
圖8 智能預警平臺邏輯架構Fig.8 Logical structure of intelligent early warning platform
前端開發工具為Visual Studio Code,系統前端工程采用vue框架來實現,后端開發工具為IntelliJ IDEA 2017.3.6×64。
3.3 基坑智能預警平臺的應用
本項目所采用智能化監測平臺的設計層面監測內容包含樁體水平位移自動化監測,坑外地表沉降自動化監測,支撐軸力自動化監測等內容。通過日期區間的選擇,對應的累計變化量與預測曲線等信息會展示在彈出的界面中,通過點擊具體彈窗界面可查看詳細信息。預測曲線與預警閾值可為施工方提供參考,可根據預測的走向對施工方案做出適當調整。
4 基坑監測數據分析
4.1 樁體水平位移監測結果分析
本項目基坑采用分層開挖模式,開挖完一層后會施加一道支撐直至坑底。K2+490N、K3+850N、K3+910N三個樁位處的樁體水平位移隨基坑開挖變化情況如圖9所示。
由圖9可知,支護樁沿深度方向水平位移呈現出“兩頭小,中間大”的變形趨勢,最大水平位移在0.4倍樁體位置處。支撐施作后,樁頂水平位移受到限制,隨開挖進行最大位移出現位置不斷下移。對比K2+490N與K3+850N樁體水平位移變化情況可知,開挖結束后K2+490N與K3+850N的最大位移分別為7.18 mm、24.89 mm,K3+850N開挖深度約為K2+480的2倍,最大位移為K2+480N的3.47倍。對比K3+850N與K3+910N樁體水平位移變化情況可知,開挖結束時K3+910N最大位移為17.72 mm,K3+850N基坑寬度為K3+910N的1.67倍,最大位移為K3+910N的1.4倍。綜上,樁體水平位移隨開挖深度、開挖寬度的增加而增大,隨支撐道數增加而減少。
4.2 坑外地表沉降監測結果分析
各個斷面坑外地表沉降監測結果如圖10所示。
由圖10可知,K2+490N斷面在第一個開挖階段三個監測點位的最大沉降量分別為1.39、2.33、3.63 mm,開挖結束后的最大沉降量分別為19.91、24.96、15.12 mm。K3+850N斷面處在最后兩個開挖步時,不同點處沉降量出現明顯差異,距坑邊5 m處在最后開挖階段沉降變化不明顯,最終沉降量為16.43 mm,距坑邊10、15 m處地表沉降變化幅度較大,直至開挖結束最大沉降為28.7、27.03 mm。K3+910N斷面變化趨勢與K3+850N斷面基本一致,最終三個點位達到的最大沉降為25.98、27.02、17.53 mm。綜上,監測點位處地表沉降隨基坑開挖深度增加而增大,地表最大沉降在距坑邊10 m位置處。
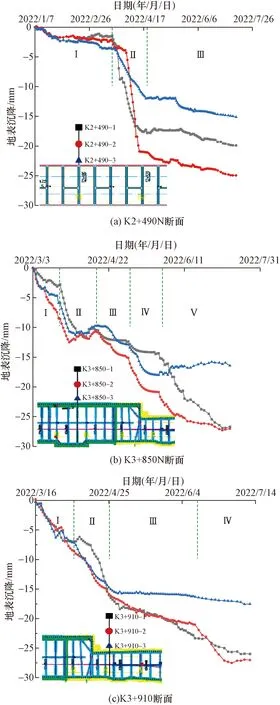
圖10 坑外地表沉降監測結果Fig.10 Monitoring results of ground settlement
4.3 支撐軸力監測結果分析
各個斷面第一道混凝土支撐和第二道鋼支撐軸力的監測數據如圖11所示。
由圖11可知,在第一道混凝土支撐施作完成后,K2+480N、K3+850N和K3+910N斷面處混凝土支撐軸力隨基坑開挖深度增加而線性增加,混凝土支撐最大軸力實測值分別為2 175、2 701和2 449 kN。施作鋼支撐后混凝土支撐軸力隨開挖深度的增加近似呈線性增加,但增加速率因受鋼支撐影響有所降低,軸力最大值分別為2 709、3 314、2 978 kN,增長速率分別降低了45.7%、91.9%、78.1%。開挖結束第二道鋼支撐實測最大軸力為611、892、725 kN。綜上,支撐軸力隨基坑開挖深度的增加而線性增大,支撐增加會降低其軸力增長速率。
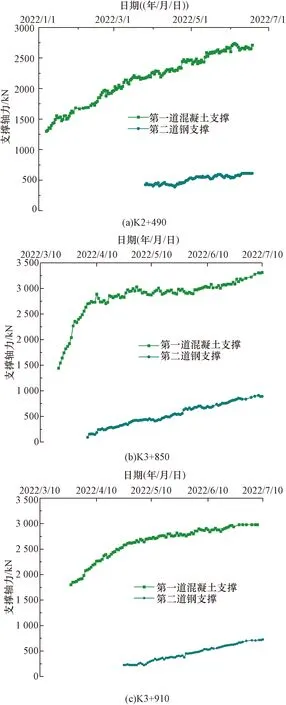
圖11 支撐軸力監測結果Fig.11 Monitoring results of axial force
5 結論
針對深基坑現場監測中人工監測不及時、精度低、數據少等問題,以武漢某深基坑工程為依托,利用自動化監測與采集設備獲得了基坑變形、受力等監測數據,利用前端開發工具Visual Studio Code和后端開發工具IntelliJ構建了深基坑自動化監測與智能預警云平臺。得到如下主要研究結論。
(1)自動化監測設備所采集的數據數值精確,可有效避免人工監測所產生的誤差,并能根據監測需求自行設置監測頻率,可實時采集監測數據。
(2)深大基坑自動化監測及智能預警平臺實現了基坑施工全過程中自動化監測、智能動態預測與風險評估。該平臺可用于指導基坑現場作業。
(3)支護樁最大水平位移在0.4倍支護樁長位置處,地表沉降隨基坑開挖深度增加而增大,支撐軸力隨基坑開挖深度增加而線性增大且軸力增長速率隨支撐施加而降低。
猜你喜歡
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
表面工程與再制造(2019年6期)2019-08-24 06:40:04
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
