基于MPC 的分布式驅動越野車輛原地轉向控制研究
2023-12-08 04:18:20譚雨豪劉澤軒
汽車工程學報 2023年6期
付 翔, 譚雨豪, 劉澤軒, 周 軍
(1.武漢理工大學 汽車工程學院,武漢 430070;2.中國人民解放軍63969部隊,南京 210000)
分布式驅動車輛已成為新能源汽車動力系統領域的研究熱點[1],相較于傳統驅動車輛,分布式驅動車輛具有響應快速、各輪獨立可控的優點,通過差扭或差速轉向,可以大大減小車輛的轉彎半徑,特殊情況下可以實現原地轉向,實現0 轉彎半徑,稱之為中心轉向。具有原地轉向功能的越野車輛,可以使車輛在街道、橋頭或特殊地形等狹窄地面條件下進行轉向和調頭[2],具備更加靈活的驅動形式,擁有更強的越野機動性。
目前,國內外學者根據不同的原地轉向機理針對不同類型運載工具設計了多種原地轉向方式。考慮不同運載工具的工況需求,其原地轉向機理的側重點也有不同。周福陽等[3]設計了一種農用柔性底盤,通過原地姿態切換的方式偏置轉向軸,改變輪胎布置方式實現原地中心轉向和原地縱橫行切換。改變車輪的布置方式最容易實現原地中心轉向,但存在車身結構復雜,原地轉向時需要車身姿態轉換,過程繁瑣等問題。孔寧寧等[4]基于Adams設計了一種安全閥搬運自動導向車,利用萬向輪慣性原理實現車輛原地轉向,在小型底盤上容易實現,但基于萬向輪結構的原地轉向原理的強度不契合越野車輛,其穩定性達不到越野車輛的需求。康亞彪等[5]對野外無人車輛原地轉向進行了動力學分析,推導出原地轉向所需的阻力矩、驅動力矩和功率,并通過計算模型進行了驗證,結果表明輪轂電機分布式驅動車輛具有實現原地中心轉向的理論基礎。白鴻飛[6]在無人駕駛分布式電驅動試驗車設計與程序開發中通過改變輪胎布置方式實現原地中心轉向和較小轉向半徑轉向。采用輪轂電機分布式驅動的方式進行原地轉向,但是也改變了輪胎布置方式,原地轉向時存在模式切換復雜,機動性不高等問題。張曉瑩等[7]設計了一種六輪電動輪鉸接車的原地轉向,通過驅動轉向油缸使鉸接車輛達到最大鉸接角,實現鉸接車原地轉向過程。通過改變底盤布置減小轉向半徑,但是存在底盤特殊、應用面比較窄的問題。綜合以上原地轉向的相關研究,原地轉向的現有方法較多,但對于越野車輛,暫無特別適配的原地轉向模式。本文立足于越野車輛,基于傳統底盤布置,進行分布式驅動越野車輛原地轉向控制研究。
同時,分布式驅動車輛能通過靈活的電子控制策略對車輪轉矩或轉速進行控制,因此對分布式驅動車輛控制算法進行研究,有利于實現車輛原地轉向的功能。本文意在通過控制左右側車輪反轉實現原地轉向,旨在盡可能減小車輛轉彎半徑直至為0,以提高車輛轉向機動性能。HOU Rufei等[8]基于分布式驅動車輛提出了一種適合于道路附著力的分級轉向穩定性控制策略,針對每個電動機轉矩的權重因子設計為適應每個車輪的不同附著力,仿真結果表明,該策略能提高車輛行駛的穩定性。肖祥慧等[9]提出了一種基于模型預測控制器的輪轂電機轉矩分配控制系統,綜合分析并保證分布式驅動車輛穩定性所需的輪轂電機轉矩約束條件,對4 個輪轂電機進行實時控制,執行設計的最優轉矩分配方案。胡金芳等[10]為了改善分布式驅動轉向機動性能,對于高速轉向行駛穩定性的需求,通過二次規劃方法優化分配各車輪驅動力矩,根據車速和穩定性參數制定模糊規則來決策兩種模式的協調系數,并仿真驗證了有效性。XIE Ju 等[11]針對分布式驅動自主電動汽車的路徑跟蹤問題,提出了利用橫擺力矩對跟蹤偏差補償和車輛穩定性進行協調控制的方法,以提高跟蹤精度和車輛穩定性。縱觀以上研究成果,目前研究人員對分布式驅動控制方面已有較深認識,但是大多數研究都集中在車輛的穩定性控制,對原地轉向這種特殊工況的研究不夠深入,缺乏較成熟的控制體系。對于分布式驅動車輛原地轉向研究,應從車輛控制的安全性、穩定性、以及橫擺力矩決策和轉矩分配等方面考慮,開發其控制算法,安全有效地實現其原地轉向功能。
模型預測控制(Model Predictive Control,MPC)通過反饋回路優化方法,可以實現控制目標和被控對象的連續控制,適用于解決非線性、在線約束和多輸入多輸出問題,目前在車輛控制領域應用廣泛[12]。李旭等[13]提出了一種改進的基于模糊控制框架的變采樣時間MPC 策略,該策略在復雜工況下能提高系統的響應速度,且具備較好的舒適性和安全性。莊元強等[14]提出一種基于非線性模型預測控制算法轉矩協調控制策略。該策略可以改善車輛行駛穩定性,確保車輪滑移率維持在穩定的范圍內,提高車輛驅動、制動的穩定性。本文利用MPC算法的在線優化和對非線性控制問題的求解以及解決純滯后問題的獨特優勢,契合越野車輛原地轉向需求。
本文分析了原地轉向機理、結合車輛特性分析并建立了車輛原地轉向系統模型,搭建了分布式驅動車輛原地轉向分層控制策略,上層結合MPC 和PI滑模算法,設計了基于質心位置和方向誤差的橫擺力矩決策跟蹤器,下層控制器基于二次規劃,以輪胎附著利用率為優化目標分配四輪轉矩。通過搭建硬件在環仿真平臺,驗證所設計的控制策略。
1 原地轉向動力學分析
通過分析研究對象的系統特性,明確控制對象特點,建立了符合控制需求的車輛動力學模型。通過探究輪轂電機分布式驅動車輛特性與原地轉向運動的聯系,明確輪轂電機分布式驅動車輛在結構和控制層面的優勢。
研究對象為一輛四輪轂電機分布式驅動車輛,可通過控制左右側車輪向相反方向運動實現原地轉向。輪轂電機分布式驅動車輛的原地轉向過程主要是依據差速轉向的方式,即通過施加外力使左右兩側車輪產生不同方向的速度,從而利用兩側車輪速度差實現原地轉向,當車輛進行原地轉向時,最理想的狀態為車輛的轉彎半徑和轉向中心的偏移量為0。
1.1 整車動力學模型
忽略車輛的垂向、俯仰和側傾運動,車輛在大地坐標系X-Y上運動,以車身坐標系x-y來描述車輛運動[15],如圖2所示,建立縱向、橫向和四個車輪旋轉動力學的七自由度模型,易推導出如下的車輛動力學方程[16]。
式中:m為整車質量;vx和vy為縱向和橫向速度;ωr為車輛橫擺角速度;Fxi為第i個車輪受到的縱向力;Fyi為第i個車輪受到的側向力;Iz為車輛繞z軸的轉動慣量;B為輪距;lf表示前軸到質心的距離;lr表示后軸到質心的距離;γ為車身橫擺角。
如圖2所示,每個車輪的旋轉動力學方程為:
式中:J為車輪的轉動慣量;ωw為車輪的轉角加速度;Tdi為車輪驅動轉矩;Tri為第i個車輪在行駛過程中由于彈性滯后引起的滾動阻力;Fxi為第i個車輪的縱向驅動力;r為車輪半徑;Tb為制動轉矩。
在車輪轉向過程中,各輪胎垂向載荷由側向和縱向加速度引起的載荷轉移決定,4 個車輪的垂向載荷可以表示為:
式(3)中,縱向和橫向的加速度ax和ay由式(4)得到。
車輛進行原地轉向時,由于縱向速度接近0,車輪會處于滑移狀態,此時側偏角和縱向側滑率都存在,輪胎在完全滑移的條件下,輪胎變形如圖3所示。
在側偏角和縱向滑移率都存在的情況下,基于輪胎摩擦圓理論和以拋物線分布的地面法向力的輪胎聯合模型,可得出車輪所受合力為[17]:
式中:μ是輪胎胎面基底與路面間的摩擦系數;σ是總滑移率;σm是完全滑動可達到的最大滑移值;θ是輪胎參數和地面法向力函數常數;k是每單位面積的輪胎側向剛度。
總滑移率與側向滑移率σy和縱向滑移率σx有關,如式(7)所示。
則縱向力和側向力可由式(8)給出:
式(4) 中的σx和σy可 由 式(10) ~(11)得到。
式中:ωw為車輪轉速;reff為有效半徑;Vx為車輛縱向速度;α為車輪側偏角。
1.2 原地轉向機理分析
由圖2 可知,車輛在轉向過程中產生的總轉向阻力矩為:
滾動阻力Ffi的計算如式(13)所示。
式中:f為滾動阻力系數。
總的驅動力矩為:
代入整車參數即可求得各力矩的值。
為了后續控制策略的設計,計算整車最大橫擺角加速度,如式(15)所示。
由上述式子可知,在驅動力矩與轉向阻力矩相等時,車輛達到穩定轉向狀態,驅動力矩小于轉向阻力矩時,車輛無法轉向,驅動力矩大于轉向阻力矩時,在車輛轉向過程中存在轉向角加速度,當兩側車輪反向時,即可進行原地轉向。
2 原地轉向控制策略設計
如圖4 所示,原地轉向模式采用一鍵切換模式,為了便于對功能的更新和子控制器的拓展,本文對控制器采用了分層控制結構。四輪獨立驅動越野車輛原地轉向控制策略由上層期望橫擺力矩決策層和下層橫擺力矩分配層構成。
上層控制器包括期望控制輸入決策器和期望控制輸入跟蹤器,基于MPC 控制器,以車輛當前質心位置X、Y、γ為狀態量,盡可能小的質心偏移量χ(x,y,γ),ey=Y-Yr,ex=X-Xr為控制目標,設計期望的橫擺角速度ωrd,將橫擺角速度實際值和期望值誤差作為滑模控制器輸入,上節計算得出的整車最大橫擺角加速度作為限值,防止側向加速度出現失穩的情況,計算輸出實現車輛原地轉向的橫擺力矩。下層控制器以輪胎附著力利用率為優化目標,電機系統以及輪胎附著力極限為約束,優化分配上層控制器輸出的橫擺力矩,輪轂電機依據下層控制器的優化轉矩調整轉矩,從而形成作用在車輛上的直接橫擺力矩,實現原地轉向功能。
2.1 上層期望橫擺力矩決策
2.1.1 基于MPC的控制變量期望值計算
MPC 控制器的整體架構主要分為3 步:建立系統模型并預測系統未來狀態;設計目標函數;根據約束條件求解最優化問題[18-19]。
由圖1 可知,在地面固定坐標系XOY下,車輛運動學方程為:
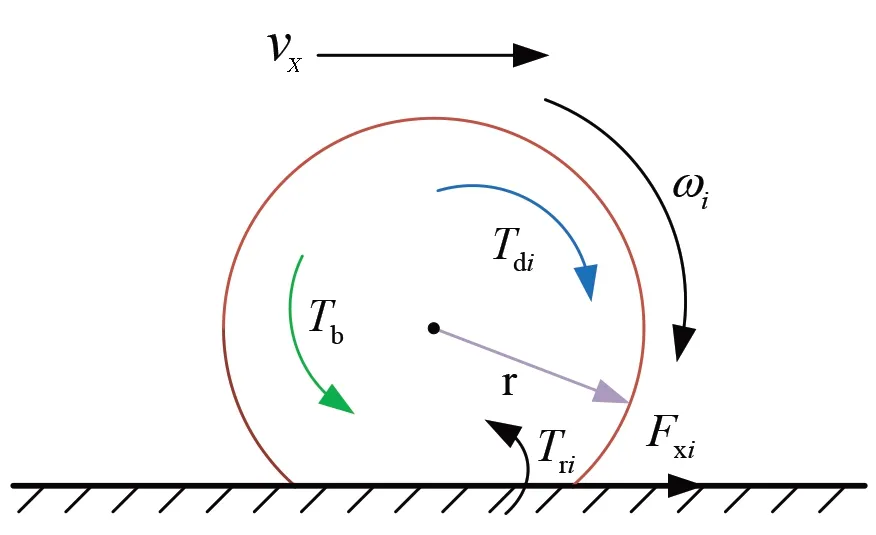
圖2 車輪動力學分析

圖3 存在側偏角下的輪胎變形
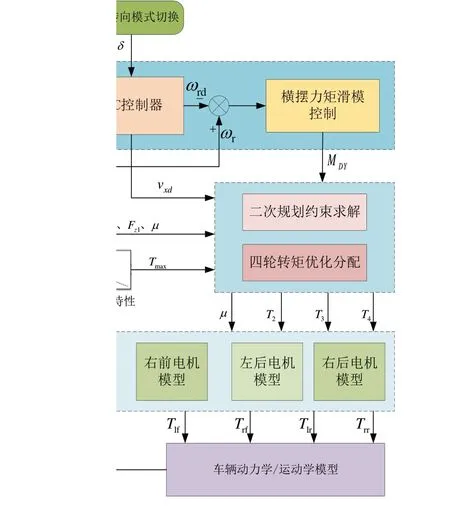
圖4 原地轉向分層控制結構
根據式(16),將系統看作一個輸入為u(v,ωr)和狀態量為χ(x,y,γ)的控制系統,其一般形式為
對式(16)在參考軌跡點進行泰勒展開并忽略高階項,得到原地轉向車輛誤差模型為:
為使駕駛員對轉向過程中的期望橫擺角速度進行實時控制,在MPC 控制器中加入了方向盤轉角輸入,通過方向盤轉角控制原地轉向過程中的期望橫擺角,以達到駕駛員在環的目的。期望橫擺角γr和方向盤角度的關系見式(19),式中δ為駕駛員當前的方向盤轉角輸入;δmax為最大的方向盤轉角,γmax為最大的期望橫擺角,此處為2pi;為保證固定方向盤轉角輸入下的期望橫擺角速度不變,即橫擺角的誤差在固定轉角下保持一定,在等式中加入當前時刻的橫擺角γ。
同時,考慮原地轉向的有效性,車輛的轉向半徑應足夠小,期望的質心偏移量應接近于0,即xr= 0,yr= 0。
利用前向歐拉法對式(17)進行離散化處理。
將位置誤差和控制誤差整合為一個新的狀態量,如式(21)所示。
得到下一時刻關于控制增量的狀態空間表達式為[20]:
對得到的基于控制增量的狀態空間表達式進行迭代,可得系統未來的預測方程為:
將問題轉化為帶有控制量極限約束和控制增量約束的二次規劃問題[21],如式(24)所示:
式中:Np,Nc分別表示輸出預測范圍和控制范圍,且Np>Nc;ρ為權重因子;ε為松弛因子;Q和R為一定維度的加權矩陣;Δut、Δumin、Δumax分別為t時刻的控制增量和控制增量的上下限;ut、umin、umax為t時刻的控制量及其上下限;目標函數中第1 個總和反映了目標跟蹤的期望性能,第2 個總和反映了對控制量的約束。
定義系統輸出量參考值為:
為防止車輛側向加速度過大而產生失穩現象,對期望橫擺角速度設置上下限值
對式(24)進行求解,得到控制時域內一系列縱向車速和橫擺角速度的控制增量,其第1 個樣本Δu*t為實際作用于系統的最佳控制增量,由此得到的當前時刻狀態反饋控制律為:
u(t)即為當前時刻為實現車輛原地轉向所需的期望車速及期望橫擺角速度。
2.1.2 基于PI滑模控制器的橫擺力矩決策
設計滑模控制器來計算跟蹤上述期望橫擺角速度所需的橫擺力矩值,滑模控制是一種應用廣泛的非線性控制,能處理系統的不確定性[22]。為了提高系統的魯棒性和跟蹤性能,在系統表示中加入了橫擺角速度的積分項,設置滑模面函數為:
式中K為滑模面函數參數,對式(28)求導得到:
采用等速趨近律,如式(30)所示。
式中:ζ為趨近律常數,表明系統的狀態點以何種速率接近滑模面。
為削弱滑模控制中的抖振現象,用飽和函數sat(s)代替sgn(s),如式(31)所示。
式中:H為邊界層厚度。
聯立式(28)~(31)以及整車動力學模型,得到附加橫擺力矩值為:
2.2 基于二次規劃的下層橫擺力矩優化分配模型
基于輪胎摩擦圓理論,輪胎與地面接觸面內的水平合力總是小于其垂直載荷與摩擦系數的乘積,輪胎的附著率η由式(33)表示[23]。
由于在實際情況下,側向力不可控,將式(33)簡化為:
為使各輪的附著性能得到充分利用,選取輪胎利用率方差和四輪利用率之和最小作為優化目標,如式(35)所示。
式中:ηi為各個輪胎的利用率;ηave為各個輪胎利用率的平均值;λ為優化目標加權系數。
以四輪縱向力為控制量,將式(35)改寫成標準二次規劃問題形式:
式中:控制量x=[Fx1Fx2Fx3Fx4]T。
引入以下約束條件。
1)等式約束
為使原地轉向過程中的質心偏移量較小,其縱向加速度應接近于0,即縱向合力為0,綜合考慮橫擺力矩的約束,得到轉矩分配等式約束為:
2)不等式約束
四輪的驅動力大小主要受輪胎摩檫力和電機所能提供的最大轉矩有關,所以有:
式中:i0為減速器減速比,Tlim由式(39)決定:
ni為當前電機轉速,nb為電機基速。
采用內點法求解上述二次規劃問題,求解各個車輪的最優驅動力,進而得到電機的輸出轉矩。
3 控制策略仿真驗證
為驗證所提出的原地轉向控制策略的有效性,搭建了dSPACE 硬件在環仿真平臺來模擬實車環境,設置路面附著系數為0.85,對不同方向盤轉角輸入的車輛進行了原地轉向仿真測試。
3.1 車輛參數及試驗仿真平臺
在Matlab/Simulink 軟件運行環境內,通過dSPACE 公司ModelDesk 標準化建模工具內置模型庫,搭建越野車整車動力學、轉向系統、懸架系統、制動系統等模型,并參照實際樣車搭載的輪轂電機驅動系統,高壓鋰電池等多種動力總成部件的輸出特性及臺架測試數據,構建高精度的執行器模型。為實現精確模擬實際執行器的輸出效果與行駛工況,同時有效降低開發成本,將混合動力越野車輛模型燒寫至人-車-路閉環車載原型開發系統SCALEXIO制器板卡DS1401內。
利用實時代碼生成接口(Real Time Interface,RTI)把前述在Matlab/Simulink 軟件環境下設計策略模型自動編譯為可定制化處理的實時運行代碼,并燒寫至快速原型控制器MicroAutoBox2 中的數據處理器板卡DA1006內。在搭載英飛凌TC1782系列芯片作為主控單元的整車控制器中,存儲、燒寫了C 語言形式的嵌入式代碼,進一步通過配置各控制器的CAN 通訊、ADC、PWM 等接口的底層驅動程序,以滿足控制策略模型在環與整車控制器硬件在環的測試條件。
在上位機PC 中,通過dSPACE 公司的實時仿真管理軟件ControlDesk 對測試閉環中Simulink 模型的控制變量與特征參數進行在線調節,結合仿真動畫演示軟件MotionDesk 實現高效監控仿真測試過程、試驗數據的記錄與分析,大幅提升控制模型與控制策略仿真驗證的測試效率與可靠性。最后,基于dSPACE 的硬件在環仿真驗證平臺搭建結果如圖5所示。
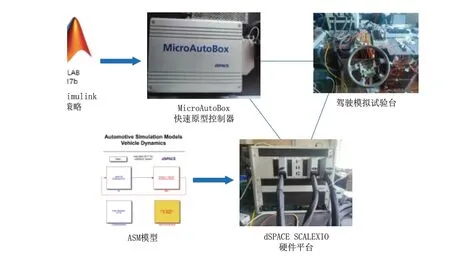
圖5 dSPACE硬件在環仿真平臺
車輛和輪轂電機總成的主要參數見表1~2。

表1 整車參數
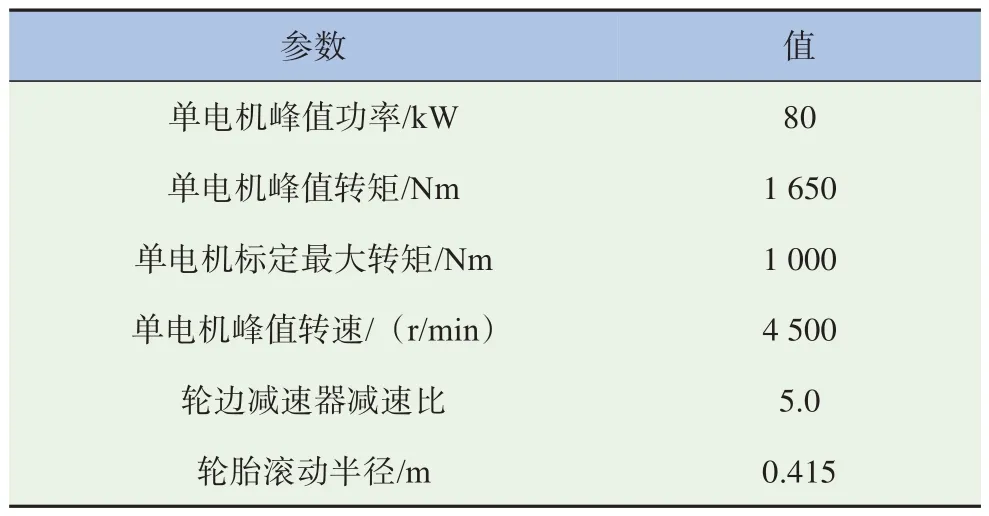
表2 電動輪總成參數表
3.2 方向盤角階躍輸入仿真
圖6 為不同方向盤轉角階躍下,車輛原地轉向一周的仿真結果圖。

圖6 方向盤角階躍輸入仿真結果
對整車原地轉向過程進行分析,當駕駛員轉動方向盤時,MPC控制器根據當前駕駛員意圖迅速決策出期望的橫擺角速度,PI滑模控制器計算出跟蹤所需要的橫擺力矩,各電機輸出轉矩瞬間增大,此時,由兩側輪胎縱向力差形成的驅動力矩大于由側向力形成的轉向阻力矩,車輛出現橫擺角加速度,整車進行原地轉向,隨著橫擺角速度接近期望值,各電機轉矩降低,直至橫擺角速度等于期望橫擺角速度,驅動力矩和轉向阻力矩平衡,橫擺角速度保持穩態不再變化。
階躍仿真表明,根據圖6 中各參數的變化情況,轉向初期,電機輸出轉矩瞬間增大,車輪最大驅動力矩達到4 310 Nm,隨著橫擺角速度接近期望值,各電機轉矩迅速降低,計算得到橫擺角速度穩態時,整車的驅動力矩和轉向阻力矩為30 182 Nm,同時,采用二次規劃的下層轉矩分配方法,在實現原地轉向功能的同時,以最優的輪胎利用率為目標,對各輪分配轉矩進行動態調整。整個原地轉向過程符合預期,側向加速度在較小范圍內,在實現原地轉向的過程中,并未出現明顯失穩情況,且在原地轉向過程中,除開始原地轉向時略有增大,轉向后期的波動不超過0.02,認為是比較穩定的轉向過程。各輪轉速正常,無失穩現象發生。且期望橫擺角速度也是在一定范圍內根據質心位置而有較小的波動。經計算,轉向中心的偏移量最大為3.446 m,最大轉向半徑為0.09 m,相比于傳統轉向極大地提升了車輛的轉向機動性。
3.3 方向盤動態輸入仿真
動態輸入仿真如圖7 所示,為方向盤轉角連續輸入的仿真結果,由圖可知,所設計的分層控制器可以根據方向盤轉角的變化下決策出不同的期望橫擺角速度,并具有較好的跟蹤效果。在MPC 橫擺角速度決策器加入駕駛員意圖后,期望橫擺角速度隨著駕駛員輸入方向盤轉角動態變化,駕駛員可以實時對原地轉向過程中的橫擺角速度進行實時控制。動態仿真表明,其側向加速度在車輛開始原地轉向時略有增大,轉向后期的波動小于0.05,也認為是穩定的轉向過程,并未出現失穩。相比于階躍輸入仿真,動態輸入仿真隨著方向盤轉角減小,期望橫擺角速度下降,各輪轉矩從4 000 Nm降低至2 000 Nm,過程中的橫擺角速度跟隨精確,也未出現失穩,轉向過程平穩。整個原地轉向過程中,轉向中心偏移量最大為2.890 m,比階躍輸入略小,最大轉向半徑為0.157 m,比階躍輸入的最大轉向半徑略大,轉向軌跡與階躍輸入仿真的原地轉向軌跡較為相似,滿足車輛在狹小地形進行轉向的條件。

圖7 方向盤轉角連續輸入仿真結果
4 結論
1)分析了原地轉向時車輛的動力學特性,建立了車輛原地轉向運動學模型,研究了原地轉向的轉向機理,并結合仿真結果進行了轉向過程分析。
2)針對原地轉向過程中的整車轉向中心偏移問題,設計了基于原地轉向中心理想軌跡以及期望橫擺角速度的模型預測控制算法,從硬件在環仿真結果可知,該算法使整車在方向盤轉角動態輸入過程中,轉向中心偏移量最大為2.890 m,最大轉向半徑為0.157 m,提高了車輛在狹窄路面下的通過能力。
3)考慮駕駛員在車輛原地轉向過程中對車輛轉向速度的可控性,在模型預測算法中加入了方向盤轉角控制,使車輛可以精確識別駕駛員意圖,同時基于PI滑模的橫擺力矩跟蹤器,可以使車輛橫擺角速度快速響應,并在期望的橫擺角速度處保持穩態,跟蹤效果比較好,整個原地轉向過程具有較好的魯棒性和穩定性,駕駛員可以對原地轉向過程中的橫擺角速度進行實時控制。由dSPACE 硬件在環仿真試驗結果可知,本文控制算法可以穩定且有效地實現車輛原地轉向功能,滿足越野車輛對高速轉向機動性的要求。
