面向飛行器電磁散射特征診斷的近場頻域成像算法
2023-12-08 08:38:14賈高偉
國防科技大學(xué)學(xué)報(bào) 2023年6期
關(guān)鍵詞:模型
賈高偉,陰 鵬,邵 帥
(國防科技大學(xué) 空天科學(xué)學(xué)院, 湖南 長沙 410073)
飛行器的雷達(dá)隱身性能,已經(jīng)成為先進(jìn)飛機(jī)的重要指標(biāo)。[1]
無人飛行器沒有飛行員座艙、生命維持系統(tǒng)的約束,其機(jī)身結(jié)構(gòu)尺寸可以更小,結(jié)構(gòu)形式可以更為靈活,結(jié)構(gòu)材料也可以更為多元化。鑒于飛行器結(jié)構(gòu)樣式與材料構(gòu)成與雷達(dá)隱身性能密切相關(guān),無人飛行器在結(jié)構(gòu)和材料方面具有的靈活性,使得無人飛行器相對于有人機(jī)具有更大的隱身性能優(yōu)化空間。但也須重視,無人飛行器具備的更為先進(jìn)的復(fù)合材料、更為精細(xì)的外形結(jié)構(gòu)使得基于縮比模型的測量與評估精度變差,而外場全尺寸實(shí)物測試存在成本高昂、保密性差、精度受限、易受天氣影響等特點(diǎn),不利于無人飛行器保持成本低廉、研發(fā)周期短等優(yōu)勢。因此,在室內(nèi)或者室外的較小區(qū)域內(nèi)開展全尺寸無人飛行器的近場測量,成為無人飛行器雷達(dá)散射特征分析的重要趨勢[1-2]。綜合上述分析得知,飛行器的極低雷達(dá)散射截面(radar cross section, RCS)設(shè)計(jì)與研制以及更為復(fù)雜工況下的RCS評估均需要近場測量技術(shù)的支撐。
事實(shí)上RCS是在遠(yuǎn)場條件下衡量目標(biāo)電磁散射特性的物理量。在近距離開展RCS測量,電磁波不滿足遠(yuǎn)場條件,此時(shí)的測量被稱之為近場RCS測量。近場測試的核心技術(shù)是將近場測量數(shù)據(jù)轉(zhuǎn)換(亦稱外推)為遠(yuǎn)場數(shù)據(jù),并得到RCS。從機(jī)理上看,數(shù)據(jù)外推一般可分為兩種技術(shù)路線:基于成像原理的外推技術(shù)和基于成像結(jié)果的外推技術(shù)[3]。基于成像結(jié)果的外推技術(shù)處理流程簡潔,且可獲得雷達(dá)圖像用于散射特征診斷,是當(dāng)前研究熱點(diǎn)。從實(shí)現(xiàn)過程看,它可以包含兩個(gè)階段,首先是近場成像,然后是基于成像結(jié)果的RCS外推。
在基于遠(yuǎn)場假設(shè)(即平面波假設(shè))的成像中,根據(jù)回波信號(hào)模型,回波數(shù)據(jù)可直接看作圖像的譜域采樣。因此成像過程可直接經(jīng)坐標(biāo)變換或插值后利用逆傅里葉變換實(shí)現(xiàn)。具體地,若以ISAR二維成像模式為例,以目標(biāo)中心為原點(diǎn)建立極坐標(biāo)系,某一散射點(diǎn)的RCS可以表示為σ(ρ,φ),ρ為目標(biāo)相關(guān)圓心距離,φ為角度。一般地,成像過程可以表述為:
(1)
式中,f是輻射頻率,θ是成像積累角,EF(f,θ)是遠(yuǎn)場回波數(shù)據(jù),ξ(f,θ,ρ,φ)為成像因子。由式(1)可知,像σ(ρ,φ)與回波EF(f,θ)之間滿足傅里葉變換關(guān)系,即σ(ρ,φ)?EF(f,θ)。
近場條件下,受球面波幾何特征的影響,成像問題變得復(fù)雜。回波信號(hào)模型中相位與目標(biāo)坐標(biāo)位置不再是簡單的由波數(shù)決定的線性關(guān)系。因此回波數(shù)據(jù)不能直接看成圖像的譜域采樣,而需經(jīng)過更多的相位補(bǔ)償和插值操作。但終究能夠通過近場回波數(shù)據(jù)EN(f,θ)得到目標(biāo)的像σ(ρ,φ)。這樣通過像σ(ρ,φ)就建立了近場回波與遠(yuǎn)場回波之間的聯(lián)系[3]。
基于上述介紹可知,近場成像的結(jié)果十分重要,直接影響RCS的外推,且近場成像結(jié)果能夠以圖像的形式直觀地展示目標(biāo)強(qiáng)散射點(diǎn),在飛行器的設(shè)計(jì)、研制、定型、生產(chǎn)與使用過程中均具有重要意義。
結(jié)合成像理論可知,雷達(dá)天線相對目標(biāo)的運(yùn)動(dòng)軌跡決定了成像算法的選擇。當(dāng)雷達(dá)天線相對于目標(biāo)做直線運(yùn)動(dòng)時(shí),傳統(tǒng)的SAR成像算法[4],如尺度變標(biāo)算法(chirp scaling algorithm, CSA)、頻率變標(biāo)算法(frequency scaling algorithm, FSA)以及距離徙動(dòng)算法(range migration algorithm, RMA)等均考慮了球面波前的影響,因而可以直接應(yīng)用于近場條件下的精確成像。
但當(dāng)掃描方式不是直線軌跡時(shí),如轉(zhuǎn)臺(tái)成像,則上述算法均不再適用。轉(zhuǎn)臺(tái)成像是指雷達(dá)收發(fā)天線不動(dòng),目標(biāo)放置在轉(zhuǎn)臺(tái)上并沿方位向旋轉(zhuǎn),該模式使用方便,易于實(shí)現(xiàn)對目標(biāo)360°全方位的電磁散射測量,是評估飛行器電磁散射特性的常用測量模式。按照目標(biāo)距離天線位置的不同,轉(zhuǎn)臺(tái)成像又可分為近場條件和遠(yuǎn)場條件兩類典型模式。
針對遠(yuǎn)場條件下的轉(zhuǎn)臺(tái)成像,高效率的成像算法包括距離多普勒算法(range Doppler algorithm, RDA)和極坐標(biāo)格式算法(polar format algorithm, PFA)。RDA適用于小轉(zhuǎn)角成像,在觀測時(shí)間內(nèi)散射點(diǎn)的走動(dòng)不超過一個(gè)分辨單元的情況下[5],所獲得的頻率域目標(biāo)信號(hào)的極坐標(biāo)數(shù)據(jù)可近似被認(rèn)為是直角坐標(biāo)網(wǎng)格上的數(shù)據(jù),對距離和方位向的數(shù)據(jù)分別進(jìn)行傅里葉變換即可得到目標(biāo)的雷達(dá)圖像。PFA對RD算法成像性能進(jìn)行了拓展,不再將小角度的極坐標(biāo)數(shù)據(jù)近似為直角坐標(biāo)上的數(shù)據(jù),而是通過極坐標(biāo)采樣將數(shù)據(jù)插值到具有均勻柵格的直角坐標(biāo)系中,再利用二維傅里葉變換得到目標(biāo)圖像[6]。
針對近場條件下的轉(zhuǎn)臺(tái)成像,現(xiàn)有的成像算法大多是時(shí)域算法。包括時(shí)域相關(guān)(time domain correlation, TDC)法、后向投影算法(back projection algorithm, BPA)等[4],時(shí)域成像算法通常能夠適用各類成像幾何模型,但其不足是計(jì)算量大,成像用時(shí)長,對成像處理器要求高。頻域處理算法方面,Soumekh提出了一種基于系統(tǒng)核函數(shù)共軛轉(zhuǎn)置的波前重建算法[7]。該算法是基于傅里葉變換及匹配濾波的成像算法,其成立的理論條件是系統(tǒng)核函數(shù)滿足正交性,能夠?qū)崿F(xiàn)斜距平面頻譜向地平面頻譜的精確投影。但當(dāng)雷達(dá)輻射信號(hào)為寬帶信號(hào)且成像場景較觀測半徑更大時(shí),基于系統(tǒng)核函數(shù)共軛轉(zhuǎn)置的頻譜投影會(huì)帶來相位誤差,導(dǎo)致成像失敗。概括地說,針對近場條件下的轉(zhuǎn)臺(tái)成像,現(xiàn)有的頻域成像方法仍不成熟,急需新的成像方法在確保成像質(zhì)量的前提下提高成像效率,這對快速完成相關(guān)飛行器的雷達(dá)散射特征診斷具有重要意義。
本文基于轉(zhuǎn)臺(tái)成像幾何模型,以線性調(diào)頻信號(hào)為輻射信號(hào),建立了近場成像通用回波模型,基于駐定相位原理得到回波二維頻譜解析形式,分析了近場條件下轉(zhuǎn)臺(tái)成像頻域處理的難點(diǎn),并結(jié)合工程實(shí)際,提出了近似處理方法。本文的工作著重分析近場條件下的轉(zhuǎn)臺(tái)成像頻域算法,暫不涉及RCS校正與外推。
1 轉(zhuǎn)臺(tái)成像通用模型
1.1 轉(zhuǎn)臺(tái)成像幾何模型與通用回波模型
轉(zhuǎn)臺(tái)成像中目標(biāo)放置于轉(zhuǎn)臺(tái)之上,雷達(dá)收發(fā)機(jī)及天線固定,雷達(dá)天線相位中心(antenna phase center, APC)對應(yīng)轉(zhuǎn)臺(tái)中心的下視角為θZ。根據(jù)雷達(dá)運(yùn)動(dòng)-目標(biāo)不動(dòng)與雷達(dá)不動(dòng)-目標(biāo)運(yùn)動(dòng)的等效性,該成像模型如圖1所示。
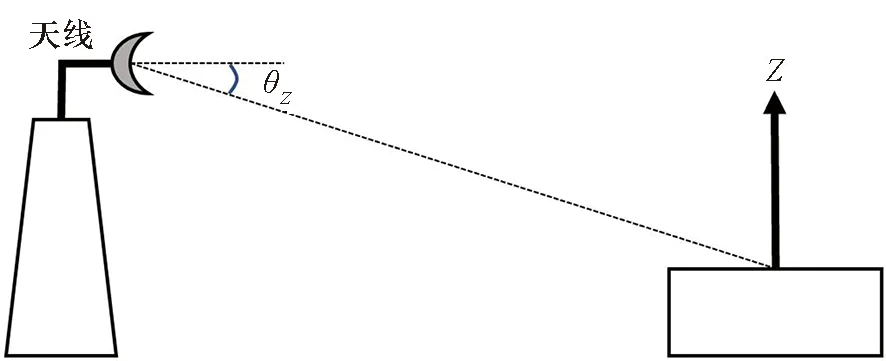
圖1 轉(zhuǎn)臺(tái)成像結(jié)構(gòu)示意圖Fig.1 Structural diagram of rotating imaging
對于飛行器目標(biāo)而言,其電磁散射來自局部效應(yīng)的散射中心,且多散射中心的矢量合成散射場和雷達(dá)散射截面同理論計(jì)算得到的散射場以及雷達(dá)散射截面吻合較好[8]。本文開展的成像算法分析同樣基于散射點(diǎn)模型,考慮的成像策略是在一定角度內(nèi)相干積累并假定在該積累角范圍內(nèi)散射點(diǎn)具有恒定的散射特性。成像算法致力于實(shí)現(xiàn)成像結(jié)果中散射點(diǎn)正確的空間位置分布與良好的聚焦質(zhì)量。相關(guān)的成像幾何模型定義為:
圖2中H代表APC相對于轉(zhuǎn)臺(tái)的高度,R代表雷達(dá)APC與轉(zhuǎn)臺(tái)中心的水平距離,等效為APC運(yùn)動(dòng)半徑,Ra代表轉(zhuǎn)臺(tái)上放置目標(biāo)的最大半徑。設(shè)雷達(dá)APC相對轉(zhuǎn)臺(tái)中心的旋轉(zhuǎn)角為θ,相對于轉(zhuǎn)臺(tái)中心O,雷達(dá)APC的三維極坐標(biāo)為(R,θ,H),可以定義xr=Rcosθ,yr=Rsinθ,則APC的笛卡爾坐標(biāo)為(xr,yr,H)。不失一般性,設(shè)定轉(zhuǎn)臺(tái)上某散射點(diǎn)P坐標(biāo)為(r,φ,0),可以等價(jià)表示為(x,y,0),其中x=rcosφ,y=rsinφ。

圖2 具體的近場轉(zhuǎn)臺(tái)成像幾何模型Fig.2 Detailed imaging geometry model of near-field rotating imaging
基于圖2所示成像幾何模型,可以得到雷達(dá)APC同目標(biāo)P之間的瞬時(shí)斜距為:
(2)
設(shè)雷達(dá)發(fā)射信號(hào)為線性調(diào)頻(linear frequency modulated, LFM)信號(hào):
(3)

(4)

1.2 回波頻譜特性解析分析
對式(4)沿方位觀測角θ進(jìn)行傅里葉變換,可以得到:
S(k,ξ)
exp(-jξθ)dθ
(5)
式中,ξ為方位角度域波數(shù),為簡便計(jì),下文均稱之為角度波數(shù)。
針對式(5),基于駐定相位原理,可以通過求解式(6)來獲取對應(yīng)的駐定相位點(diǎn)[10-11]。
(6)


(7)

(8)
由此可知,轉(zhuǎn)臺(tái)成像回波對應(yīng)兩個(gè)駐定相位點(diǎn),其頻譜由兩部分組成,這同圓周SAR的信號(hào)頻譜是相似的[11],這也是轉(zhuǎn)臺(tái)成像在頻域?qū)崿F(xiàn)的難點(diǎn)所在。將由式(7)、式(8)求解得到的駐定相位點(diǎn)代入式(5),可以得到轉(zhuǎn)臺(tái)成像模式下雷達(dá)回波頻譜在(k,ξ)域的表示形式為:
S(a,b,k,ξ)=SⅠ(a,b,k,ξ)+SⅡ(a,b,k,ξ)
(9)
式中,SⅠ(a,b,k,ξ)和SⅡ(a,b,k,ξ)分別為不同駐定相位點(diǎn)對應(yīng)的子頻譜[11]。
(10)
針對SⅠ(a,b,k,ξ)和SⅡ(a,b,k,ξ),可以分別構(gòu)造對應(yīng)的水平面頻譜形式:SⅠg(a,b,k,ξ)和SⅡg(a,b,k,ξ),記為:
(11)
結(jié)合圓周SAR成像方面的研究成果[10],將斜距平面對應(yīng)的頻譜轉(zhuǎn)換為水平面頻譜是關(guān)鍵環(huán)節(jié),后續(xù)的成像處理可以通過頻域處理高效率完成。一種樸素的處理思想是對SⅠ(a,b,k,ξ)和SⅡ(a,b,k,ξ)分別進(jìn)行相位補(bǔ)償ΩⅠ(a,b,k,ξ)和ΩⅡ(a,b,k,ξ),即可得到SⅠg(a,b,k,ξ)和SⅡg(a,b,k,ξ)。
將SⅠg(a,b,k,ξ)與SⅡg(a,b,k,ξ)通過因式分解,總的頻譜形式Sg(R,r,k,ξ)可以重寫為:
Sg(R,r,k,ξ)
=SⅠg(a,b,k,ξ)+SⅡg(a,b,k,ξ)


(12)
但在實(shí)際的相位補(bǔ)償處理操作中,需要獲知相位項(xiàng)ΩⅠ(a,b,k,ξ)和ΩⅡ(a,b,k,ξ)的解析表達(dá)式。以ΩⅠ(a,b,k,ξ)為例,理論上它的取值等于SⅠ(a,b,k,ξ)與SⅠg(a,b,k,ξ)的相位差,對比觀察式(10)和式(11)可知,ΩⅠ(a,b,k,ξ)項(xiàng)與目標(biāo)半徑r以及角波數(shù)ξ有關(guān),那么ΩⅠ(a,b,k,ξ)項(xiàng)的補(bǔ)償將是距離及角度空變的,精確的相位補(bǔ)償效率將很低。一種工程化的處理思路是針對飛行器的近場成像,重點(diǎn)考慮成像幾何模型的特殊性,引入近似條件,簡化處理流程。
結(jié)合圖1,常規(guī)飛行器一般是縱橫向較大,高度向較小,雷達(dá)APC與轉(zhuǎn)臺(tái)高度差不大,即H值通常較小[12];飛行器結(jié)構(gòu)復(fù)雜,一般不滿足散射中心各向同性且無遷移現(xiàn)象,其RCS具有明顯的方位空變性。本文分析的前提是散射點(diǎn)在一定成像積累角度內(nèi)具有恒定的散射特性。若成像積累角過大,則散射特性恒定的假設(shè)不再成立[13-14],因此有必要約束成像的積累角。
上述關(guān)于成像幾何模型特殊性的描述可以等價(jià)為:θz較小且成像積累角Θ較小。在這樣的成像約束下,結(jié)合美國Howland公司[15]以及意大利IDS公司開發(fā)的RCS近場測量系統(tǒng)[16],設(shè)定飛行器近場成像幾何模型參數(shù),如表1所示。
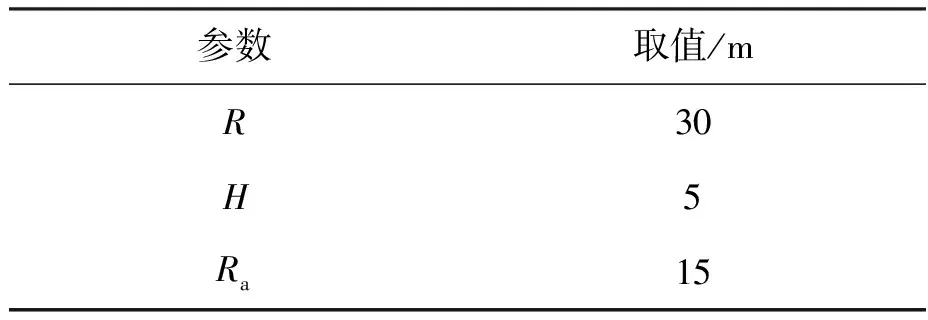
表1 成像參數(shù)設(shè)定
結(jié)合表1,當(dāng)雷達(dá)波中心頻率為0.6 GHz時(shí),補(bǔ)償函數(shù)ΩⅠ(a,b,k,ξ)和ΩⅡ(a,b,k,ξ)對應(yīng)的相位值如圖3所示。由圖3可知,在360°全孔徑范圍內(nèi),補(bǔ)償函數(shù)ΩⅠ(a,b,k,ξ)和ΩⅡ(a,b,k,ξ)變化范圍大,非線性特點(diǎn)明顯,不利于進(jìn)行泰勒級數(shù)展開或者高次函數(shù)擬合,因此針對ΩⅠ(a,b,k,ξ)和ΩⅡ(a,b,k,ξ)的精確補(bǔ)償是困難的。相應(yīng)地,一種直觀的處理辦法是通過子孔徑處理限制相位誤差,即設(shè)定子孔徑寬度θsub(等同于成像積累角Θ),在子孔徑內(nèi),如果相位補(bǔ)償函數(shù)對應(yīng)的相對誤差小于π/4,則可以忽略相位補(bǔ)償函數(shù)對成像的影響,并不再補(bǔ)償。直觀地理解,即是將斜距平面譜S(a,b,k,ξ)近似為水平面頻譜Sg(a,b,k,ξ),從而忽略了頻譜的投影處理。

圖3 補(bǔ)償函數(shù)相位隨角度波數(shù)的變化趨勢Fig.3 Phase of compensation function variations according to angular wavenumber
以表1為基礎(chǔ),在0.6~35 GHz的頻率范圍內(nèi),以相位相對變化值不超過π/4為約束,可以得到不同頻段條件下適合的子孔徑寬度選定范圍,如圖4所示。圖4中,橫坐標(biāo)為允許采用的子孔徑寬度,縱坐標(biāo)對應(yīng)不同的雷達(dá)中心頻率,圖中黃色區(qū)域代表子孔徑寬度的可行域。直觀地,當(dāng)雷達(dá)中心頻率低時(shí),所允許的子孔徑寬度更大,當(dāng)雷達(dá)中心頻率增高,對應(yīng)的子孔徑寬度不斷減小。

圖4 針對不同頻段可采用的子孔徑頻段寬度Fig.4 Acceptable width of sub-aperture according to different wavebands
基于上述處理思路形成本文的成像策略,即采用子孔徑處理(等效為小轉(zhuǎn)角)獲得雷達(dá)圖像,并通過處理一系列子孔徑數(shù)據(jù),評估飛行器全方位的散射特性。
2 頻域算法處理流程
結(jié)合第1節(jié)的理論分析,總結(jié)得到近場頻域處理流程如圖5所示。
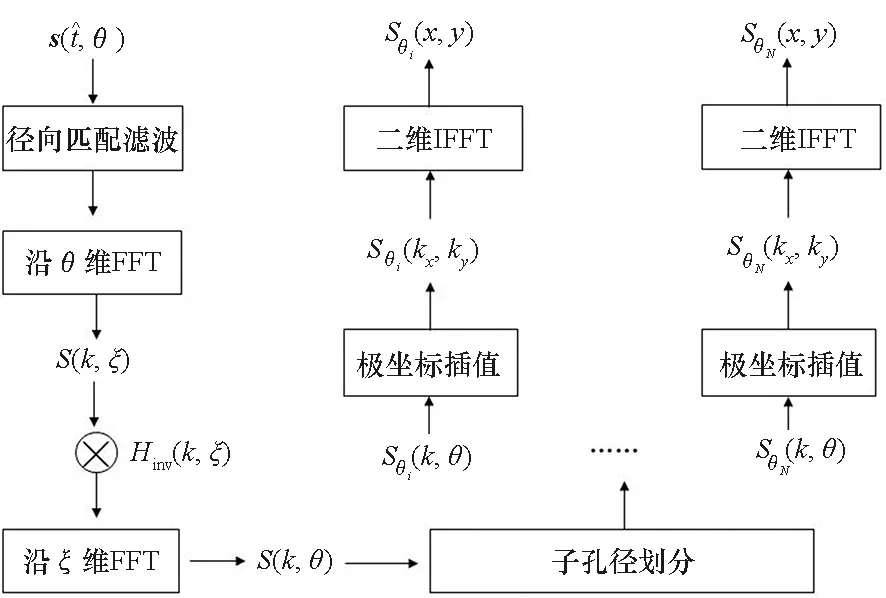
圖5 本文算法的成像處理流程Fig.5 Imaging procedure of the proposed method
(13)
經(jīng)Hinv(k,ξ)補(bǔ)償后,式(12)演變得到:
S′g(R,r,k,ξ)

(14)
將S′g(R,r,k,ξ)關(guān)于ξ進(jìn)行逆快速傅里葉變換(inverse fast Fourier transform, IFFT)[11],得到方位時(shí)域信號(hào):
S(k,θ)=A·exp(j2krcosθZcosθcosφ)·
exp(j2krcosθZsinθsinφ)
(15)
對S(k,θ)進(jìn)行子孔徑劃分,得到Sθi(k,θ),θi(i∈[1,N])對應(yīng)不同的子孔徑積累角(不同的轉(zhuǎn)角區(qū)間);隨后進(jìn)行式(16)所示極坐標(biāo)插值得到Sθi(kx,ky)=exp(jkxrcosφ)exp(jkyrsinφ);再經(jīng)過二維IFFT得到子孔徑圖像;通過對序列子孔徑圖像的后續(xù)處理,可得到不同轉(zhuǎn)角區(qū)間對應(yīng)的飛行器近場成像結(jié)果。
(16)
值得特意說明的是,在實(shí)際的應(yīng)用中,應(yīng)考慮近場測量中天線方向圖引起的錐削現(xiàn)象,否則將引入較大的幅值誤差[17-18]。鑒于本文關(guān)注于高效精確成像算法,暫不涉及RCS外推與校正,因此文中的分析未考慮天線方向圖的影響。
3 數(shù)值分析
在表1所示成像參數(shù)的基礎(chǔ)上,設(shè)定如表2所示的典型成像參數(shù),開展仿真數(shù)據(jù)的成像分析。

表2 典型成像參數(shù)設(shè)定
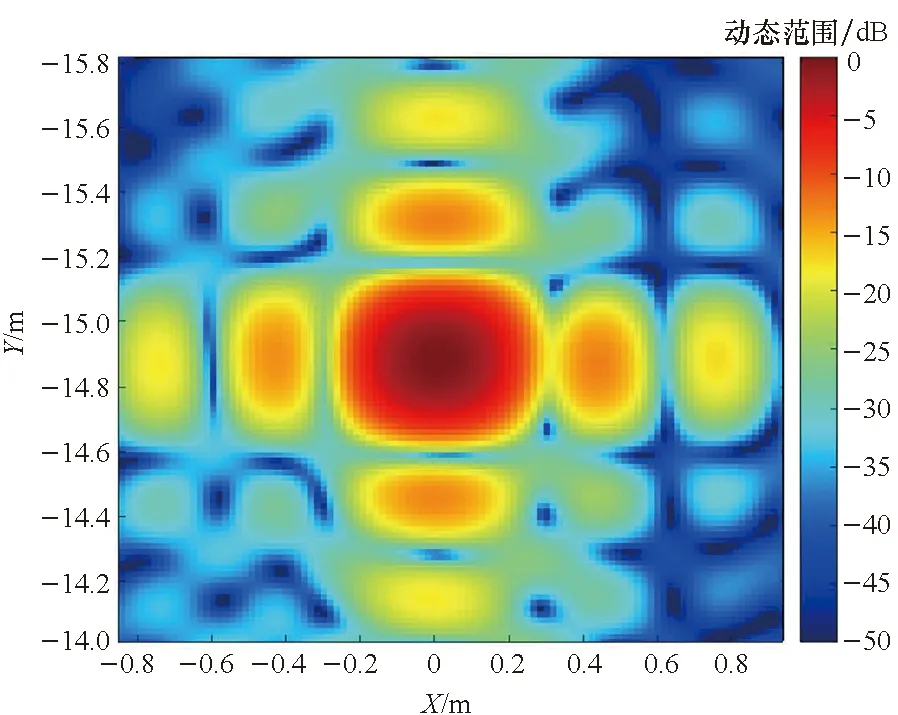
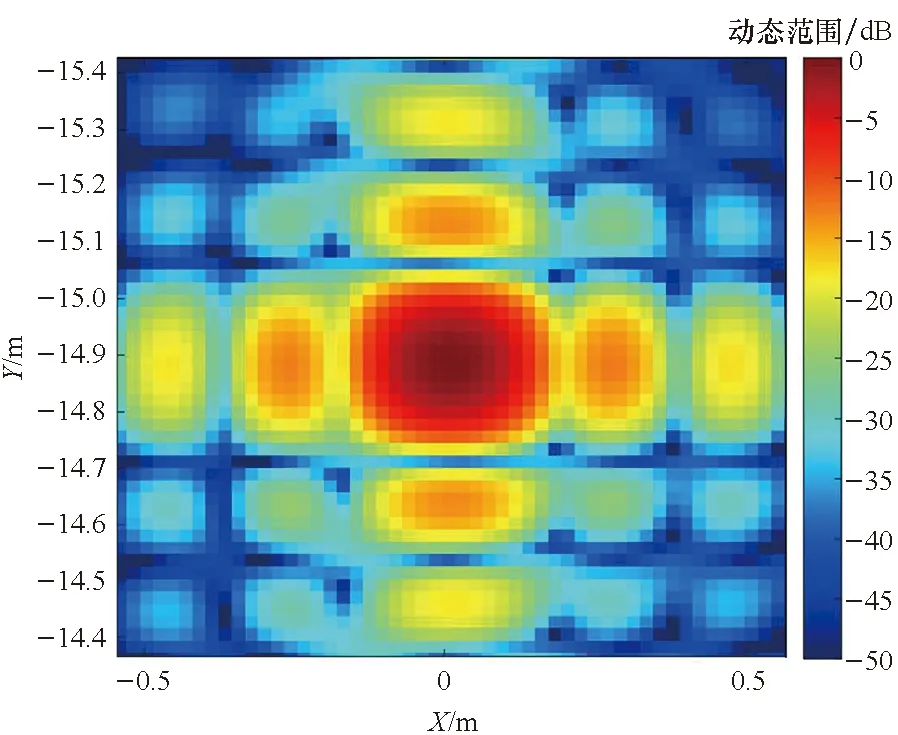
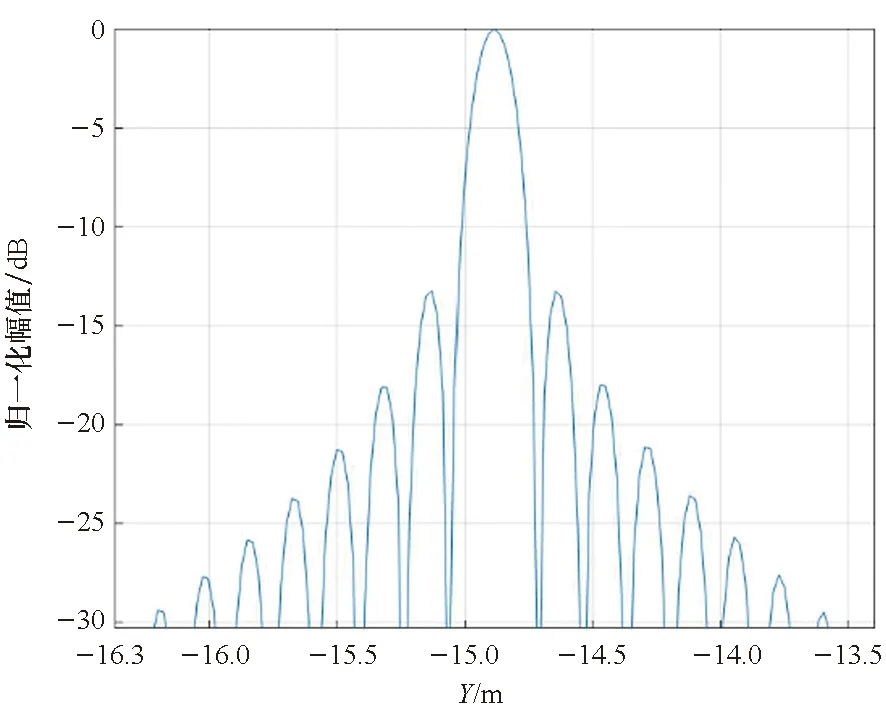
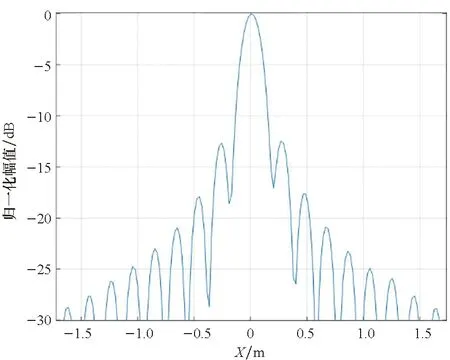
鑒于人們習(xí)慣于對徑向與橫向呈正交狀態(tài)的圖像進(jìn)行評估,表2中4類模式的轉(zhuǎn)角區(qū)間均以90°為中心,并采用PFA和BPA對比不同算法的成像結(jié)果。邊緣散射點(diǎn)對應(yīng)最大的成像半徑。圖6展示了模式1對應(yīng)的成像結(jié)果,圖6(a)表示利用本文算法處理得到的散射點(diǎn)成像結(jié)果;圖6(b)對應(yīng)PFA處理得到的成像結(jié)果;圖6(c)代表圖6(a)中邊緣點(diǎn)(0 m,-15 m)對應(yīng)的點(diǎn)散布函數(shù)分布;圖6(d)為圖6(a)中邊緣點(diǎn)(0 m,-15 m)對應(yīng)的BPA成像結(jié)果;圖6(e)為圖6(a)的頻譜支撐域;圖6(f)和(g)分別表示圖6(c)所示點(diǎn)散布函數(shù)沿橫向(Y)和徑向(X)的剖面圖。

(a) 本文方法得到的結(jié)果(a) Result produced by the proposed algorithm
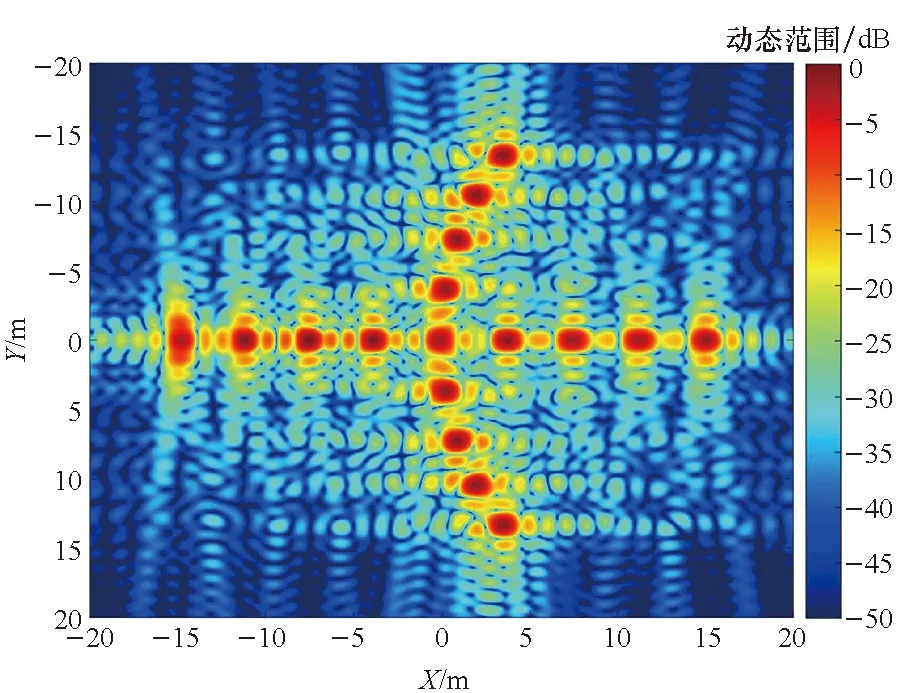
(b) PFA處理得到的成像結(jié)果(b) Imaging result produced by the PFA
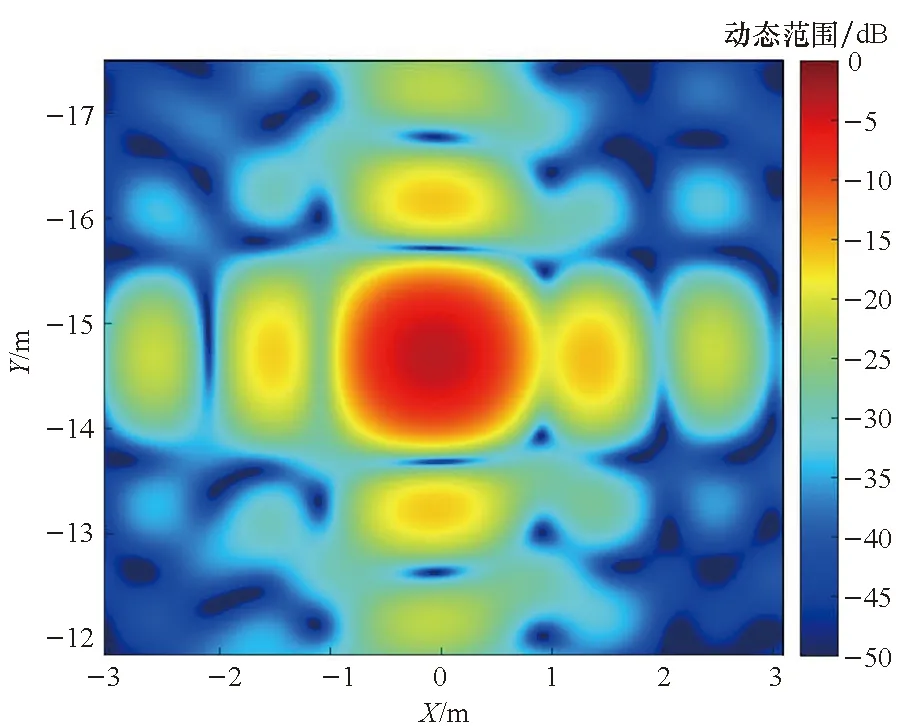
(c) 點(diǎn)目標(biāo)成像結(jié)果的放大展示(c) Enlarged display of point target imaging result
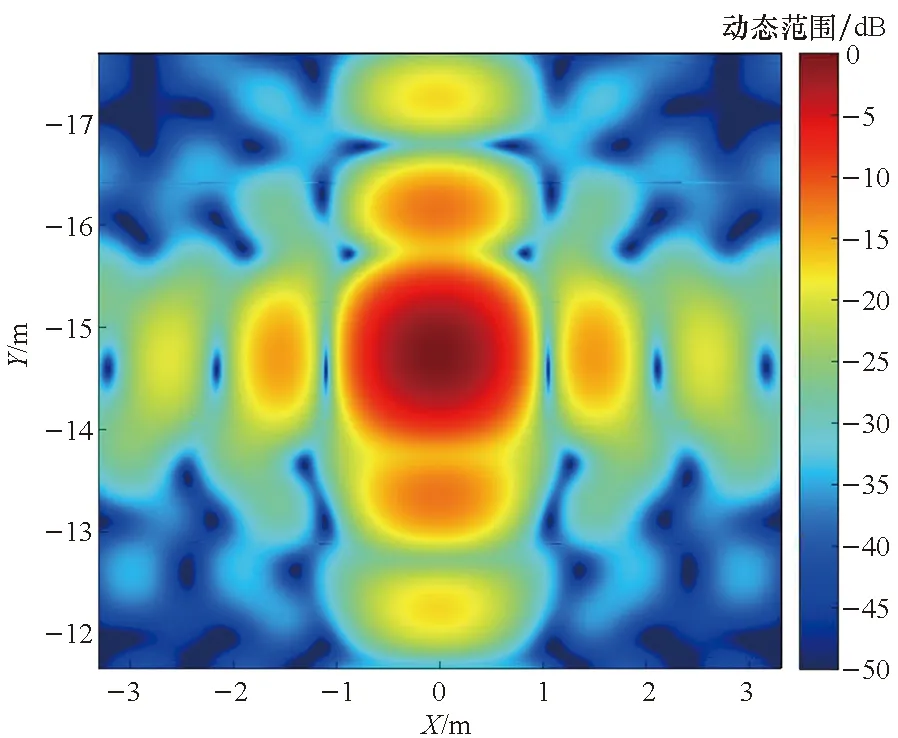
(d) 針對圖6
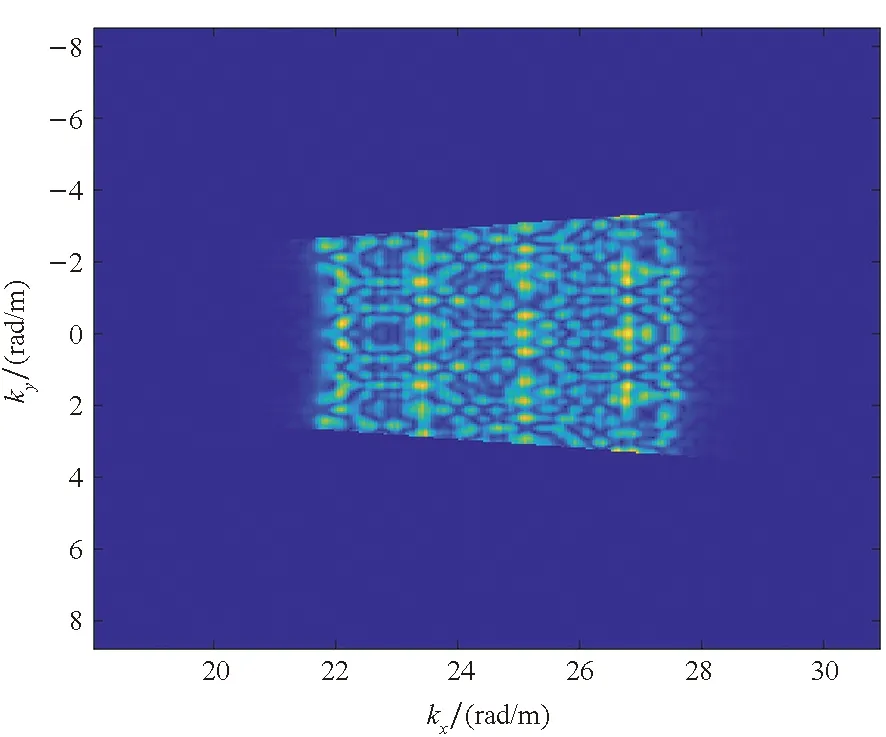
(e) 子孔徑數(shù)據(jù)對應(yīng)的頻譜形狀(e) Spectrum shape according to the sub-aperture data
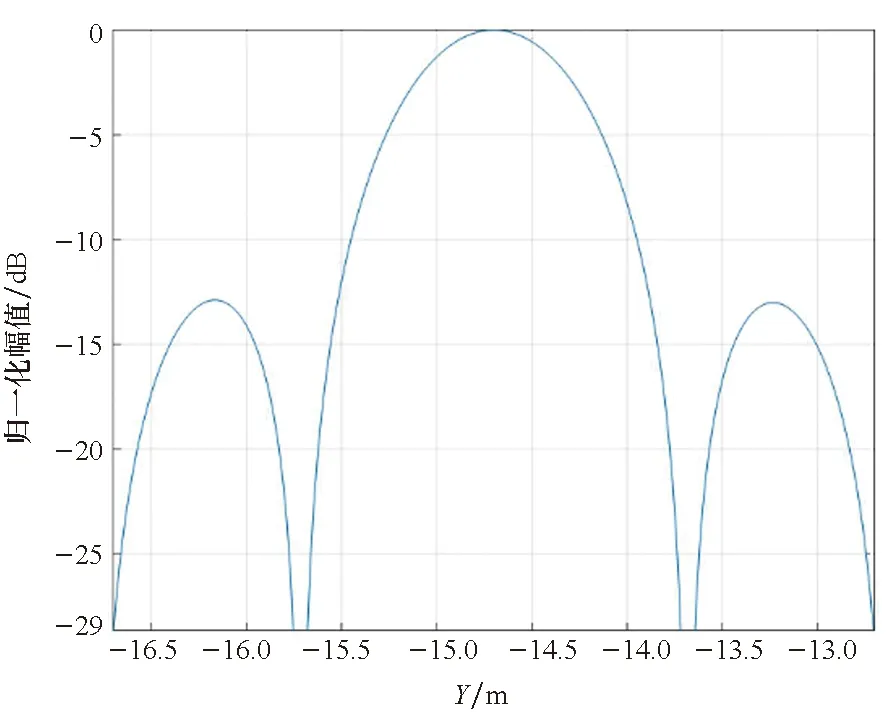
(f) 沿Y方向的剖面圖(f) Profile in direction of Y

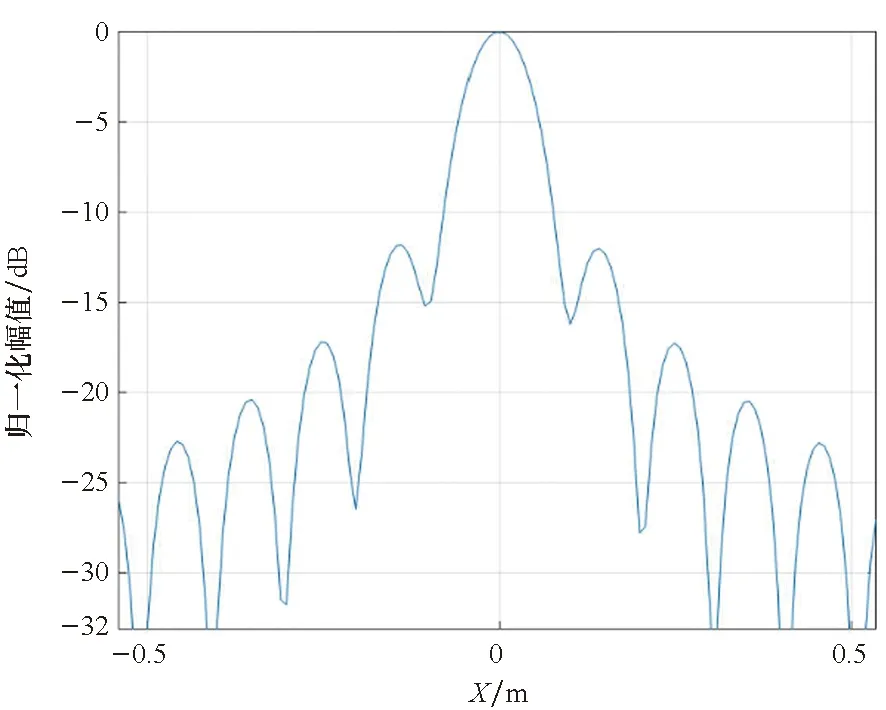
(g) 沿X方向的剖面圖
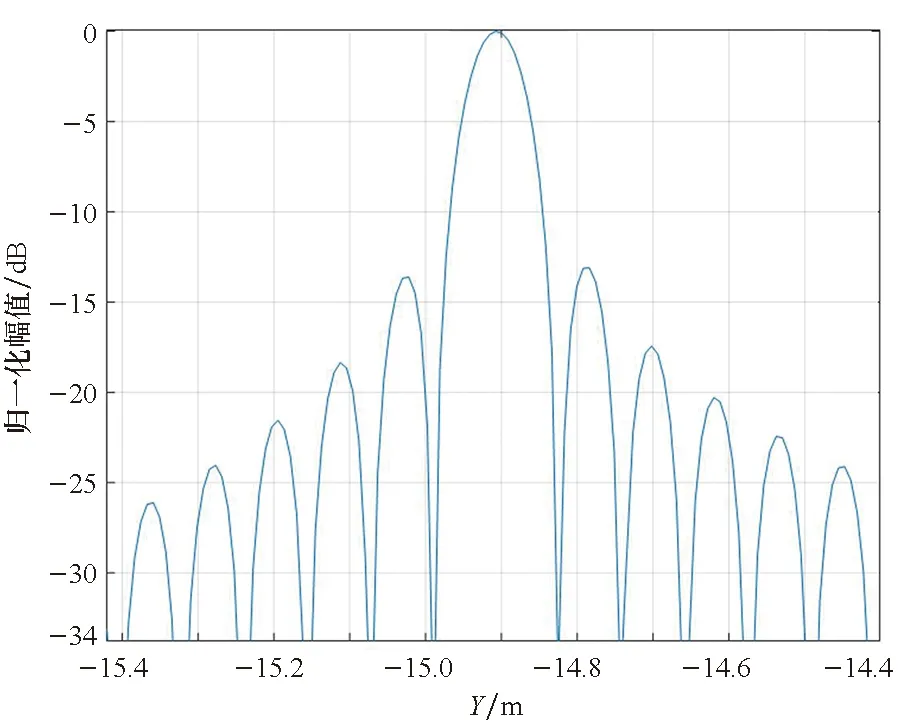
類似地,圖7、圖8、圖9分別展示了模式2、模式3、模式4對應(yīng)的成像結(jié)果。

(a) 本文方法得到的結(jié)果(a) Result produced by the proposed algorithm
(b) 點(diǎn)目標(biāo)成像結(jié)果的放大展示(b) Enlarged display of point target imaging result
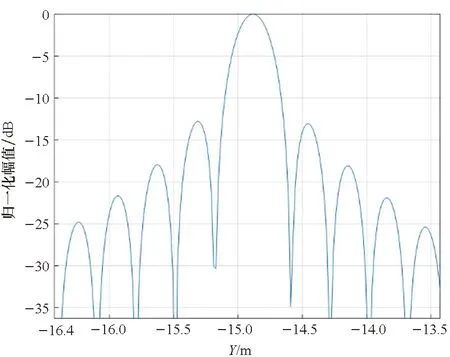
(c) 沿Y方向的剖面圖(c) Profile in direction of Y
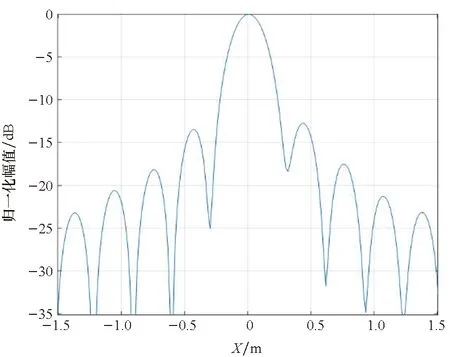
(d) 沿X方向的剖面圖

(a) 本文方法得到的結(jié)果(a) Result produced by the proposed algorithm
(b) 點(diǎn)目標(biāo)成像結(jié)果的放大展示(b) Enlarged display of point target imaging result
(c) 沿Y方向的剖面圖(c) Profile in direction of Y
(d) 沿X方向的剖面圖

(a) 本文方法得到的結(jié)果(a) Result produced by the proposed algorithm

(b) 點(diǎn)目標(biāo)成像結(jié)果的放大展示(b) Enlarged display of point target imaging result
(c) 沿Y方向的剖面圖(c) Profile in direction of Y
(d) 沿X方向的剖面圖(d) Profile in direction of X圖9 模式4對應(yīng)成像結(jié)果Fig.9 Imaging results according to model 4
針對圖6~9所示剖面圖,統(tǒng)計(jì)分辨率、峰值旁瓣比等成像質(zhì)量參數(shù),如表3所示。
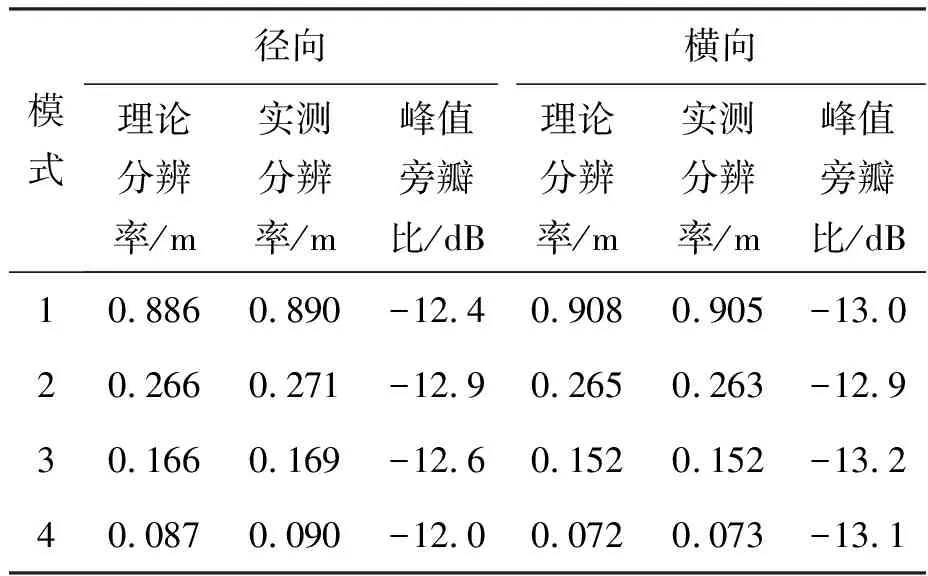
表3 成像結(jié)果的詳細(xì)分析
由圖6(a)與圖6(b)對比可知,隨著觀測半徑的增大,PFA成像質(zhì)量下降,并存在明顯的位置偏移,這同PFA需滿足遠(yuǎn)場條件的前提是吻合的;由圖6(c)和圖6(d)對比可知,本文方法得到的成像結(jié)果與BPA基本一致;表3所示成像量化分析證實(shí)本文方法處理得到的成像結(jié)果同理論值吻合。仿真成像分析證實(shí)了成像流程的可行性和魯棒性。
觀察圖6~9,總體上看,在子孔徑成像策略下,點(diǎn)散布函數(shù)基本上是二維可分離的sinc函數(shù),這從頻譜支撐域的形狀上也可以看出。但也應(yīng)注意到有所差異:
首先,點(diǎn)散布函數(shù)的Y向剖面圖中,右側(cè)第一旁瓣略高,主瓣與第一旁瓣之間的谷峰電平較理想值高,該現(xiàn)象同采樣間隔、插值精度、近似引入的相位誤差以及頻譜支撐域的形狀是否為規(guī)則的矩形均相關(guān),但圖示結(jié)果在實(shí)際應(yīng)用中是可接受的。
其次,在散射點(diǎn)的定位方面,與理想值之間存在較小的偏差,偏差的引入主要由插值處理造成且通常為固定偏差,當(dāng)偏差值小于分辨率時(shí)可以忽略它的影響,也可以進(jìn)行一致性的校正。
4 結(jié)論
結(jié)合全尺寸飛行器在室內(nèi)或者室外較小區(qū)域進(jìn)行雷達(dá)散射特征診斷的迫切需要,本文通過簡要對比,分析了近場成像的特點(diǎn),介紹了近場成像算法的研究現(xiàn)狀。針對轉(zhuǎn)臺(tái)成像模型,以獲得近場雷達(dá)圖像為目的,建立了適用于飛行器電磁散射特征診斷的近場成像通用模型,分析了近場測量回波的頻譜形式,理論上闡述了轉(zhuǎn)臺(tái)成像模式下頻域成像處理的難點(diǎn)和挑戰(zhàn)。針對近場轉(zhuǎn)臺(tái)成像的典型幾何模型,本文基于散射點(diǎn)在較小角域范圍內(nèi)近似恒定的假設(shè),提出了一種頻域快速成像算法,并分別針對典型波段進(jìn)行數(shù)值仿真分析。良好的成像質(zhì)量證實(shí)了本文所提出的理論分析與成像算法的可行性。需要指出的是,本文的研究,側(cè)重于成像聚焦質(zhì)量和近場雷達(dá)圖像的獲取,未考慮天線方向圖錐削效應(yīng)的影響,以及RCS的標(biāo)定與外推。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19