基于動力學帆船模擬訓練仿真系統的研究*
2023-12-11 12:10:44矯恒安
艦船電子工程 2023年9期
矯恒安 梁 輝 陳 龍 鄧 芳
(青島科技大學機電工程學院 青島 266061)
1 引言
隨著人們對健康生活要求的日益提高,多樣化的體育運動和科學技術應用到生活當中。帆船運動和虛擬現實技在我國社會得到普及和滲透[1],在虛擬現實技術中,仿真水平的保真度越高,系統越具有沉浸感,個人就越有可能感到出現在虛擬環境中[2]。
在帆船仿真領域,Gale T J 開發了一個帆船模擬器可以在實驗室中實現模擬航行任務[3],該模擬器的仿真系統是用C++編寫的模擬程序,利用圖形學軟件投影到屏幕上。Mulder F A 等實驗了運動模擬對虛擬帆船訓練沉浸感的效果影響[4],其仿真系統對波浪行為進行了粗略的實現,沒有顯示出真實的波浪和海風效果,缺乏物理效果渲染。Ouadahi N 等研究了一種與虛擬現實技術結合的模擬訓練設備[5],能夠鍛煉出特定的肌肉群,該模擬器仿真系統是由一個沖浪視頻游戲組成,但該模擬器的設置不是實時控制的,這意味著操作員可能會經歷滯后的效果;Verlinden J C 等開發一種先進帆船模擬器[6],并在其實驗中得出結論,對于專業帆船運動員來說,接近真實的物理環境非常重要。在Unity3D 視景仿真領域,程宇等通過Unity3D 實現水下機器人作業的實時視景仿真[7];還有一些在交通、運輸和體育等方面的應用[8~10]。在帆船運動方面,有一些帆船訓練和體育競技類的游戲,Sail Simulator10、VR Inshore 等,可以滿足一些運動員和航海迷的基本的室內訓練方法和海上航行樂趣。帆船運動仿真的真實性可以有效提高帆船運動的訓練效果和獲得沉浸式體驗。本文設計了一種新型的帆船訓練仿真系統,以OP級帆船對象為例,并基于CFD計算機流體仿真和Unity3D技術實現了一種渲染效果更佳、物理效果更加真實和沉浸感更強的帆船運動仿真系統,經實驗測試該仿真系統的有效性和較強的潛力性。
2 仿真環境的搭建
2.1 帆船模型的創建
2.1.1 物理帆船
本文所選的帆船對象是OP 級帆船(Optimist),使用這種帆船的原因為它是大部分帆船運動員和愛好者的起步訓練的選擇船只。其基本尺寸見表1。

表1 OP級帆船的基本尺寸參數
2.1.2 構建帆船模型
逼真的模型渲染效果會使操作者的獲得沉浸式的體驗。本文使用建模軟件UG12.0 對帆船模型按表1 尺寸設計,導入3DMax軟件進行坐標重置和材質渲染,最后輸出到Unity3D 中。模型的建立和材質渲染如圖1和圖2所示。

圖1 帆船模型
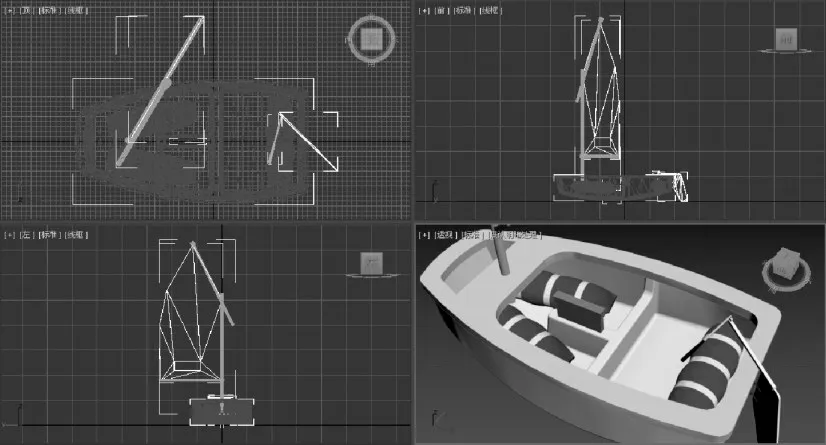
圖2 帆船模型渲染效果圖
2.2 海洋環境的搭建
本文使用Unity3D自帶的地形編輯器搭建海底地形,設置起伏程度、平滑高度和添加地形紋理,實現海底樣貌和海底砂巖材質效果;海洋效果通過掛載海洋腳本的海洋預制件,實現逼真的動態海洋場景。海底地形和海洋效果如圖3和圖4所示。

圖3 海底地形圖

圖4 海洋效果圖
3 OP帆船的仿真運動
3.1 OP帆船空氣動力學分析
帆船前進主要由風對帆翼的作用力[11],帆船前進時受到的風包括真風、視風和阻力風。真風是地面靜止物體受到的風,用Vt表示;帆船運動員感知風稱作視風,用Va表示;阻力風與航向相反;帆船航行速度用Vs表示;帆船逆風前進,帆翼受力如圖5所示。真風Vt與帆船航向Vs夾角記為α,視風Va與帆船航向Vs的夾角記為β;轉帆角φ是帆翼弦線與船體縱軸線的夾角,風攻角αw是視風Va與帆翼弦線的夾角,漂角γ是帆船航向Vs與船體縱軸線夾角。由圖5知:
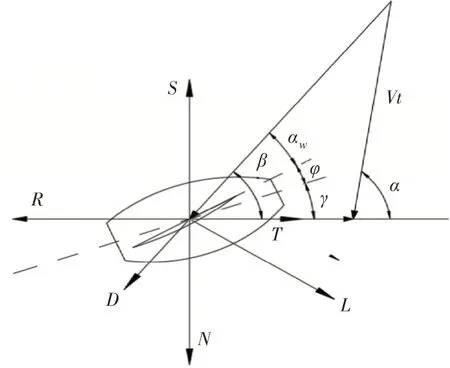
圖5 帆翼受力圖
帆翼受到的空氣作用力F,可根據伯努利原理,將該力可分解為沿視風方向的風阻力D和垂直與視風方向的風升力L,也可分解為沿航向的推力T和垂直于航向的橫向力N;由幾何關系知:
風作用于帆翼使帆船前進,風向改變,作用于帆翼的風阻力和風升力也同時發生改變,帆翼的空氣動力性能一般是由無量綱系數呈現出來的[12]。帆翼的風阻力和風升力與無因次量升力系數CL和阻力系數CD的關系定義為
ρa為空氣密度,VA為風速,A為帆翼面積。
使用數值模擬軟件Fluent 對帆翼的空氣動力性能進行數值分析[13~15],以求得不同攻角下的升力和阻力系數;由于桅桿、橫桿等所受的空氣動力遠小于帆翼的空氣動力,在此忽略桅桿等組件的空氣動力。所選OP 級帆船的帆翼展弦比1.85,拱度比14%。數值模擬使用的湍流模型為Standard k-ε模型,壓力速度耦合算法采用Coupled算法,邊界條件見表2。

表2 邊界條件
通過改變帆翼模型的轉角來獲得不同的攻角下的升力和阻力系數,圖6和圖7為30°攻角下的升力、阻力系數收斂圖;攻角αw∈[0°-180°],帆翼升力、阻力系數的值隨著攻角的變化見表3,負值表示與實際方向相反。

圖6 升力系數收斂圖
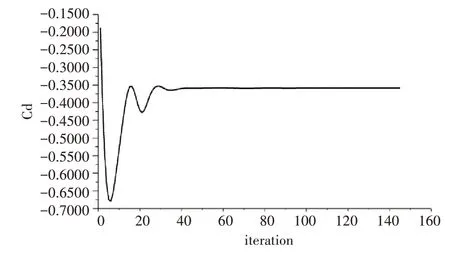
圖7 阻力系數收斂圖
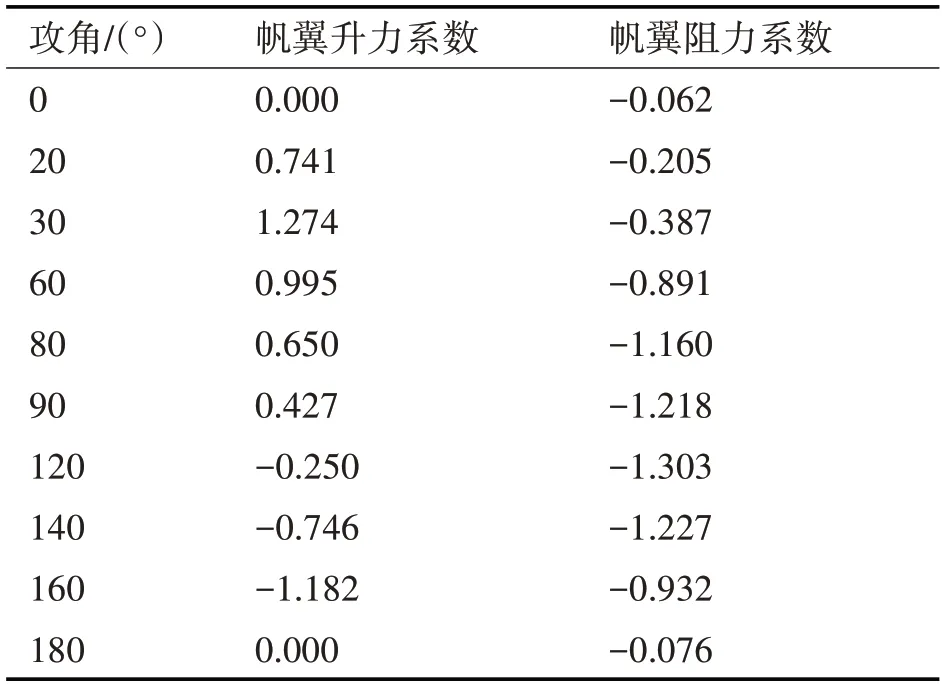
表3 不同攻角下的升力、阻力系數
以阻力系數為橫坐標,升力系數為縱坐標,相對風水平向右,OP 帆船的航向通過坐標原點。將表2 里的離散點通過繪圖工具得到升力系數和阻力系數曲線圖(CL-CD極圖),如圖8所示。沿著該航向做垂線,與CL-CD曲線相切,由此切點可以得到帆船航行時帆翼的推力系數CT和橫向力系數CN。

圖8 CL-CD極圖
根據圖10 可知,OP 帆船航行時,在一定的航向角下,合理的帆翼調整可以得到最大推力,即最大航行速度。過極圖的O點作該極圖的切線,再過O 點作該切線的垂線,可得到一個夾角ε,當帆船的前進方向的夾角小于該夾角時(θ<ε)時,帆船不會前進,該區域也被稱作死角區域。
3.2 OP帆船水體動力學分析
OP 帆船航行所受水阻力作用域為船體、穩向板和船舵,船體所受的總阻力包括空氣阻力和水阻力。相對來說,船體受到的空氣阻力遠小于帆翼受到的空氣阻力或船體受到的水阻力,在此忽略空氣對船體的作用力。當船正浮于水面,并沿船體縱軸線航行,船體受到的阻力RT為興波阻力RW、渦流阻力Re與摩擦阻力Rf之和。
但OP帆船航行時的大部分的情況都存在一定角度的漂角[16]。所以還有橫漂力和誘導阻力作用于船只上,記為RI,升力方向與航行方向相互垂直,誘導阻力與航行方向相反。故船體受到的總阻力R 為橫漂力與誘導阻力之和,受力圖如圖5所示。R與水體動力的關系即:
式中:ρw為水流密度,vw為水流速度,A 為船體特征面積,C為水體的無量綱系數。
帆船前進時,穩向板在水流中的受力類似于帆翼在氣流中的受力。船舵受力原理類似于穩向板,所以還要考慮船舵扭矩Mr對于帆船航行的影響。如圖9所示。Fkl和Fkd與Mr表達式如下:
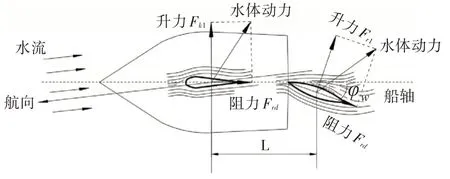
圖9 穩向板和船舵水下受力圖
φw為水流攻角,L為船舵中心到船體中心距離。
3.3 仿真環境OP帆船物理效果的實現
Unity3D仿真環境自帶的物理引擎可以滿足基本的重力效果等,但這遠不夠實現帆船運動訓練的仿真模擬。因此,該系統內的OP 帆船根據虛擬海洋環境中UI 界面設定的風流、水流等因素,并結合當前帆船狀態的帆翼的攻角角度等參數,得到流體的升力系數和阻力系數;根據上述OP 帆船動力學數學模型,實現帆船運動的物理效果,進行航行模擬。
3.4 MVC設計模式
OP 帆船的航行受環境因素、操控方式等多種變量的影響,將虛擬帆船上的各部分組件按照其真實環境所受的空氣動力和水體動力進行分析,使用MVC 設計模式,實現分層和關聯不同組件間的變化,設計模式整體架構如圖10所示。

圖10 MVC設計模式
Model 模塊用于OP 帆船各部分組件的物理效果的實現,不同組件根據輸入的流體系數和攻角等參數單獨實現不同的物理效果。
View 模塊是用于顯示仿真環境和UI 界面,該界面由Canvas 畫布構成,包含多種OP 帆船的控制按鈕等,用于多種天氣效果的切換,并提供多種不同的海上環境和多樣式的體驗。圖11所示分別為黃昏、晴天、大風天氣環境。

圖11 不同天氣下的海洋環境
Control 模塊是用于用戶與仿真系統交互的模塊。實現對OP帆船的運動控制。
4 仿真結果及系統實現
4.1 仿真航行
按照MVC 設計模式,并對OP 帆船進行空氣動力學和水體力學的分析,實現了渲染效果更好、物理效果更加接近現實的帆船仿真系統,船體整體運行狀態如圖12所示。左上角可以看到系統運行時的幀數,用來體現該系統運行時的流暢性;左下角實時的顯示帆船整體的航行狀態,為操作員的下一步操作提供判斷;右下角為小地圖顯示;右上方顯示風向和風速大小。該系統可以根據右上方UI 控件實時的對海浪和海風的進行調整,體驗不同海況下的航行模擬。

圖12 航行示意圖
4.2 對比試驗
通過對一款虛擬航行游戲VR Inshore 進行測試,并對該仿真系統與航行游戲做了比較,如圖14、15所示。可以看出本文提出的模擬器可以在第一人稱視角下進行航行模擬,并將真實環境下的流體參數考慮在內,體驗效果更加真實,海洋環境和帆船模型渲染效果更好,并且帆船控制腳本中還有對帆船的位置、船速以及航線等參數的記錄,這些參數可用來對操作者的表現和決策能力進行測試。航行軌跡如圖13所示。

圖14 航行仿真系統

圖15 虛擬航行游戲
5 結語
基于動力學和Unity3D引擎開發的帆船訓練仿真系統,使得帆船運動模擬更加真實,沉浸感更強。在模擬帆船運動中,由于不定常空氣動力和水動力,基礎模擬的復雜性可能非常繁瑣,在此通過數值分析軟件Fluent進行空氣動力學分析,使得虛擬環境中帆船運動模擬的置信度更高,并以第一人稱視角下進行航行模擬,使得操作員能夠獲得貼近真實環境的體驗感,仿真過程中,可實時的對環境參數進行調整,可得到多種仿真體驗。通過與一款虛擬航行游戲進行對比實驗,該仿真系統體驗效果更真實,沉浸感更強,更有利于帆船運動的訓練和體驗。以后,該系統記錄的航速、航線等參數,可用來對操作者進行身體和技能上的評估測試等。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-11-30 02:58:01
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩詞(2018年11期)2018-03-26 06:41:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年8期)2016-10-09 02:11:50