基于無人駕駛電動拖拉機的自適應跟蹤算法研究
2023-12-11 22:31:20吳正開王家忠郉雅周弋景剛李珊珊趙春明
中國農機化學報 2023年11期
吳正開 王家忠 郉雅周 弋景剛 李珊珊 趙春明

摘要:純跟蹤算法和斯坦利算法均屬于對車輛前輪轉角進行控制的幾何跟蹤方法,具有簡單、直接、控制參數少、容易實現等特點。無人駕駛拖拉機作業時,由于農田作業影響因素眾多,路徑跟蹤往往達不到理想效果,因此,根據純跟蹤算法和斯坦利算法各自特點,搭建權重分配的策略模型,提出一種自適應跟蹤算法。通過優化權重參數,得出最優權重值,并在不同土壤環境、不同速度以及不同重心位置條件下,進行對比仿真試驗。仿真試驗表明,自適應算法應對不同作業工況時具有更好的糾偏能力。采用千尋基站將定位信號發送給車載組合導航接收機,獲得整機的精準定位信息,將試驗地塊坐標錄入到導航系統中,利用工控機規劃出合理的作業路徑,進行田間試驗。田間試驗表明,采用自適應算法,播種作業時橫向偏差均值為0.03 m,地頭轉向時橫向偏差為0.11 m,22行作業橫向偏差均值均在0.05 m之內,滿足作業精度要求。
關鍵詞:無人駕駛;電動拖拉機;路徑跟蹤;自適應模型;權重策略
中圖分類號:S219.4文獻標識碼:A文章編號:20955553 (2023) 11017608
Research on adaptive tracking algorithm based on driverless electric tractor
Wu Zhengkai Wang Jiazhong Xing Yazhou Yi Jinggang Li Shanshan Zhao Chunming
(1. College of Mechanical and Electrical Engineering, Agricultural University of Hebei, Baoding, 071001, China;
2. Hebei Intelligent Agricultural Equipment Technology Innovation Center, Baoding, 071001, China;
3. Tianjin Yidingfeng Power Technology Co., Ltd., Tianjin, 300380, China)
Abstract:Both pure tracking algorithm and Stanley algorithm are geometric tracking methods based on the control of vehicle front wheel angle, which are simple, direct, less control parameters and easy to implement, and are widely used. However, in the operation of unmanned tractor, the path tracking often fails to achieve the ideal effect due to the many influencing factors of farmland operation. In this paper, according to the characteristics of pure tracking algorithm and Stanley algorithm, an adaptive tracking algorithm is proposed, and the control model of the adaptive tracking algorithm is built. Through simulation analysis and optimization of the weight parameters, the optimal weight strategy is obtained. Comparative simulation tests were carried out under different soil environments, different velocities and different positions of the center of gravity. The simulation results show that the adaptive algorithm can realize the adaptive control under different working conditions. The positioning signal was sent to the vehicle integrated navigation receiver by the Chihiro base station, and the precise positioning information of the whole machine was obtained. The coordinates of the test plot were input into the navigation system, and the industrial computer was used to plan a reasonable operation path for the field experiment. The field experiments show that the adaptive algorithm can achieve the mean lateral deviation of 0.03 m in sowing operation and 0.11 m in field head turning. The mean lateral deviation of 22 rows of operations is within 0.05 m, which meets the requirements of operation accuracy.
Keywords:driverless; electric tractor; path tracking; adaptive model; weight strategy
0引言
隨著北斗導航技術的不斷發展,無人駕駛電動拖拉機技術日益成熟,其作業精度是路徑規劃算法和路徑跟蹤方法綜合作用的結果。調研發現,小麥玉米聯作和麻山藥種植對農藝要求較高,在土壤特性復雜多變的農田環境下,由于受拖拉機自身結構、懸掛的剛性和農機具負載變化等許多不確定性因素干擾,給無人駕駛電動拖拉機路徑精確跟蹤帶來極大困難。目前無人駕駛電動拖拉機常見的路徑跟蹤方法,難以滿足播種精度要求。因此,研究適合無人駕駛電動拖拉機的自適應路徑跟蹤方法成為迫切需求。
幾何跟蹤算法是通過對車輛前輪轉角的控制,從而減小橫向偏差,具有簡單、直觀、便于實現的特點。目前,幾何跟蹤算法主要有純跟蹤算法(Pure Pursuit)和斯坦利算法(Stanley)。其中,純跟蹤算法使用了幾何車輛模型的轉向控制法則,對大誤差和不連續路徑魯棒性較好;缺點是在中高速時跟蹤效果不佳,且需要選取合適的預瞄距離[1]。李革等[1]采用動態調整前視距離的方式改進純跟綜算法,應用于水田作業,該算法最大跟蹤偏差可控制在0.159 m內;李逃昌等[2]采用模糊自適應方法改進純跟蹤模型,該算法能夠自適應地確定預瞄距離,試驗測試其路徑跟蹤平均偏差小于5 cm。
相比于純跟蹤算法,斯坦利跟蹤算法的控制效果更側重于控制增益,而規律性尚且不足,其優點是路徑的參考點避免和前視距離相關聯,直接將前輪轉角補償為橫向偏差和航向角偏差[3]。因此,直線跟蹤更精確,其缺點是需要調節合適控制增益來達到理想的路徑跟蹤效果,該算法由斯坦福大學針對汽車路徑跟蹤問題提出[4],但拖拉機整機結構與汽車差異較大,因此需要設計一種適應電動拖拉機的算法。
由于無人駕駛作業機組在大田作業時,存在土壤環境復雜、農機具負載變化等問題,現有的路徑跟蹤方法已不能滿足無人駕駛電動拖拉機的作業需求。因此,本文面向智慧農業的需要,設計一種自適應路徑跟蹤控制模型,并通過MATLAB/Simulink仿真和田間試驗結合的方法,驗證該算法的可行性。
1電動拖拉機作業機組的結構分析
無人駕駛電動拖拉機作業機組主要由無人駕駛電動拖拉機、整車控制系統、液壓系統、播種機等組成,如圖1所示。其整機參數見表1。
1.1拖拉機運動學分析
無人駕駛拖拉機機組播種作業具有低速行駛、轉向角度較小以及微調行駛路徑的特點。假設輪胎與地面不產生橫向力,輪胎不產生橫偏角,則拖拉機遵循阿克曼轉向模型[5],如圖2所示,其內、外輪轉向角關系為
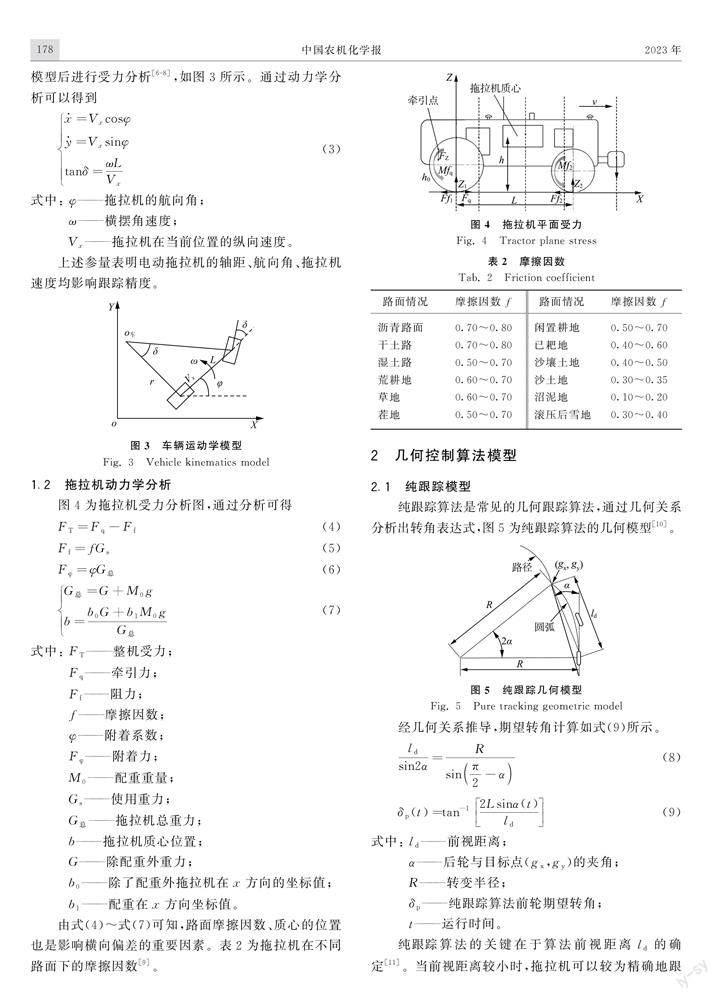
1.2拖拉機動力學分析
由式(4)~式(7)可知,路面摩擦因數、質心的位置也是影響橫向偏差的重要因素。表2為拖拉機在不同路面下的摩擦因數[9]。
2幾何控制算法模型
2.1純跟蹤模型
純跟蹤算法是常見的幾何跟蹤算法,通過幾何關系分析出轉角表達式,圖5為純跟蹤算法的幾何模型[10]。
2.2斯坦利跟蹤模型
2.3自適應模型
農田環境復雜多變,拖拉機具有在直線行駛時進行作業,在轉向時抬起農機具停止作業的特點,因此,播種作業要求拖拉機在直線作業時需要更好的直線跟蹤能力;在轉向時有更好轉向的適應能力。斯坦利方法能有效應對直線行駛時,復雜農田環境對整機行駛造成的顛簸、打滑所產生的行駛偏移[14]。農田作業空間有限,地頭轉向區域較小,造成轉向路徑較為復雜[1516],因此采用純追蹤方法確保較好的轉向性能。圖7為預設路徑及選取路段,在設置仿真條件時,土壤條件為沙土;拖拉機參數設置:車速為1.3 m/s、機具重心位置距前軸為0.5 m,可得到純跟蹤算法和斯坦利算法的Simulink仿真對比結果如圖8、圖9所示。圖中每隔0.20 m取一個路徑點分別選取直線、曲線段50個路徑點擬合曲線進行分析。拖拉機在田間作業時,直線作業時斯坦利算法作業直線度較精確,轉向時純跟蹤算法較精確。
因此,本文結合兩種算法的優勢,將兩種算法的期望轉角加權處理,提出一種自適應跟蹤模型,能夠應對電動拖拉機在田間作業時的各種復雜工況。
本文采用的自適應跟蹤方法原理如圖10所示。
結合兩種路徑跟蹤的特點搭建自適應路徑跟蹤模型,保留原拖拉機動力學模型情況下,加入權重策略模型,最終得到自適應路徑跟蹤仿真模型,如圖11所示。
選取前視距離下連續的3個路徑點,計算路徑點間角度變化情況從而判斷行駛狀況,通過加權的方式將純跟蹤方法與斯坦利方法相結合,可得
經過仿真得到自適應跟蹤算法權重k在不同時刻的變化趨勢,如圖12所示。通過MATLAB中ga求解器[17]對權重k進行優化。
利用搭建好的模型,在車速1.3m/s、沙土地面以及重心位置距前軸0.5m的工況下,三種算法跟蹤精度如圖14所示。仿真結果表明,自適應模型在田間作業時跟蹤效果較好。
3仿真分析
3.1電動拖拉機速度對橫向誤偏的影響
同一臺電動拖拉機,模擬沙土地田間作業,不同跟蹤速度下三種跟蹤算法的橫向偏差如圖15所示。
車速對跟蹤算法的跟蹤偏差具有影響。三種算法均在速度為1.3 m/s作業時表現較好,作業速度為1.5 m/s時橫向偏差波動最大。作業速度1.3 m/s時,純跟蹤算法的平均偏差絕對值在0.025 m左右,斯坦利算法的平均偏差絕對值在0.020 m左右,自適應算法的平均偏差絕對值在0.007 m左右,由此驗證了自適應模型更能適應不同速度下電動拖拉機作業環境。
3.2土壤類型對橫向偏差的影響
設定車速為1.3 m/s時,三種跟蹤模型在沙土地(μ=0.4)、壤土地(μ=0.6)的直線段下跟蹤效果見圖16。
三種算法在壤土地工況下的跟蹤效果不如沙土地,自適應模型更能保證各種土壤類型下的直線度要求。
3.3重心位置對橫向偏差的影響
設定車速為1.3 m/s時,三種跟蹤模型在壤土地工況下跟蹤,不同重心位置下跟蹤效果如圖17所示,圖中a為車輛重心距離前軸的位置。
可見,重心位置參數對拖拉機跟蹤作業的影響較大,3種算法在不同重心位置下作業精度不同,拖拉機重心位置在0.5 m時跟蹤效果較好,并且縱向比較三種算法,自適應模型具有一定自調節能力。
4田間試驗
為驗證自適應路徑跟蹤算法的有效性,進行了田間試驗。試驗在河北省辛集市馬莊鄉保高豐農場進行。選擇了長度和寬度分別約為90 m和30 m的地塊進行播種作業試驗,跟蹤效果如圖18所示。
作業前,將作業區塊信息錄入到導航系統中[1820],采用千尋基站將定位信號經差分后通過通信模塊發送給車載組合導航接收機,獲得定位信息,在確定起始作業路徑點后,遙控拖拉機行駛到地塊各端點記錄定位信息,將地塊大小與形狀等信息錄入到導航系統中,進行路徑規劃,并輸入路徑開始跟蹤。由于土地較小,采用密行播種農藝,其路徑采用跨行播種,共22行。田間試驗效果如圖19所示,跟蹤橫向偏差效果如表3所示。
試驗結果表明,電動拖拉機直線作業時最大偏差不超過0.05 m,平均偏差為0.03 m;轉向時平均偏差為0.11 m,自適應模型具有良好的跟蹤精度。
5結論
1) 由于無人駕駛電動拖拉機播種機組低速作業、轉彎半徑大、對作業直線度要求高的特點,本文搭建純跟蹤算法和斯坦利算法的田間作業跟蹤模型,進行仿真對比,得出純跟蹤算法更具有轉向適應性,斯坦利算法更具有跟蹤精確性的結論。
2) 在兩種算法基礎上,設計了權重分配策略以及轉向策略模型,提出一種適合無人駕駛電動拖拉機的自適應跟蹤算法,更適應拖拉機田間作業時的復雜工況。
3) 綜合考慮土壤類型、電動拖拉機運行速度和重心位置的影響,采用單一變量方式,對比分析三種算法的跟蹤效果,自適應算法模型能夠適應更復雜的工況。
4) 采用本文提出的自適應跟蹤模型進行田間試驗,自主直線作業時平均偏差為0.03 m,轉向時平均偏差為0.11 m,作業精度有較大的提升,滿足作業要求。
參考文獻
[1]李革, 王宇, 郭劉粉, 等. 插秧機導航路徑跟蹤改進純追蹤算法[J]. 農業機械學報, 2018, 49(5): 21-26.Li Ge, Wang Yu, Guo Liufen, et al. Improved pure pursuit algorithm for rice transplanter path tracking [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(5): 21-26.
[2]李逃昌, 胡靜濤, 高雷, 等. 基于模糊自適應純追蹤模型的農業機械路徑跟蹤方法[J]. 農業機械學報, 2013, 44(1): 205-210.Li Taochang, Hu Jingtao, Gao Lei, et al. Agricultural machine path tracking method based on fuzzy adaptive pure pursuit model [J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(1): 205-210.
[3]Snider J M. Automatic steering methods for autonomous automobile path tracking [J]. Robotics Institute, 2011.
[4]Thrun S, Montemerlo M, Dahlkamp H, et al. Stanley: The robot that won the DARPA Grand Challenge [J]. Journal of field Robotics, 2006, 23(9): 661-692.
[5]唐應時, 朱位宇, 朱彪, 等. 基于輪胎磨損的懸架與轉向系統硬點優化[J]. 汽車工程, 2013, 35(7): 640-644, 653.Tang Yingshi, Zhu Weiyu, Zhu Biao, et al. Hard-points optimization of suspension and steering systems based on tire wear [J]. Journal of Automobile Engineering, 2013, 35(7): 640-644, 653.
[6]王啟明, 毛作龍, 張棟林, 等. 基于軌跡預測與模型預測的換道路徑跟蹤控制[J]. 控制工程, 2023, 30(9): 1598-1605.Wang Qiming, Mao Zuolong, Zhang Donglin, et al. Lane changing path tracking control based on trajectory prediction and model prediction [J]. Control Engineering, 2023, 30(9): 1598-1605.
[7]孟宇, 汪鈺, 顧青, 等. 基于預見位姿信息的鉸接式車輛LQR-GA路徑跟蹤控制[J]. 農業機械學報, 2018, 49(6): 375-384.Meng Yu, Wang Yu, Gu Qing, et al. LQR-GA path tracking control for articulated vehicle based on predictive information [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(6): 375-384.
[8]李逃昌, 胡靜濤, 高雷, 等. 一種與行駛速度無關的農機路徑跟蹤方法[J]. 農業機械學報, 2014, 45(2): 59-65.Li Taochang, Hu Jingtao, Gao Lei, et al. Agricultural machine path tracking method irrelevant to travel speeds [J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(2): 59-65.
[9]余志生. 汽車理論(第5版)[M]. 北京: 機械工業出版社, 2009.
[10]王亮, 陳齊平, 羅玉峰, 等. 基于“Pure Pursuit”自動駕駛汽車的路徑跟蹤控制[J]. 汽車零部件, 2021(8): 1-7.Wang Liang, ChenQiping, Luo Yufeng, et al. Track-tracking controls of autonomous vehicle based on pure pursuit [J]. Auto parts, 2021(8): 1-7.
[11]韓科立, 朱忠祥, 毛恩榮, 等. 基于最優控制的導航拖拉機速度與航向聯合控制方法[J]. 農業機械學報, 2013, 44(2): 165-170.Han Keli, Zhu Zhongxiang, Mao Enrong, et al. Joint control method of speed and heading of navigation tractor based on optimal control [J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(2): 165-170.
[12]Zhang Q, Qiu H. A dynamic path search algorithm for tractor automatic navigation [J].Transactions of the ASAE, 2004, 47(2): 639-646.
[13]Thrun S, Montemerlo M, Dahlkamp H, et al. Stanley: The robot that won the DARPA grand challenge [J]. Journal of Field Robotics, 2006, 23(9):661-692.
[14]Kumar A A, Tewari V K. Analysis of suitable of traction model for sandy clay loam soils on farm use of tractor [J]. Journal of Agriculture and Food Research, 2021, 5(14): 100180.
[15]Samson C. Control of chained systems application to path following and time-varying point-stabilization of mobile robots[J]. IEEE Transactions on Automatic Control, 1995, 40(1): 64-77.
[16]張碩, 吳雨洋, 崔星, 等. 一種車輛橫向自適應控制方法[P]. 中國專利: CN113815602A, 2021-12-21.
[17]趙思夏, 劉孟楠, 徐立友. 電動拖拉機底盤多目標優化設計[J]. 農業機械學報, 2018, 49(S1): 492-498.Zhao Sixia, Liu Mengnan, Xu Liyou. Optimization design of electric tractor chassis based on multiple performance objectives [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(S1): 492-498.
[18]Qiu Hongchu. Navigation control for autonomous tractor guidance [M]. IIIinois, USA: University of IIIinois at Urbana-Champaign, 2002.
[19]羅錫文, 張智剛, 趙祚喜, 等. 東方紅X-804拖拉機的DGPS自動導航控制系統[J]. 農業工程學報, 2009, 25(11): 139-145.Luo Xiwen, Zhang Zhigang, Zhao Zuoxi et al. Design of DGPS navigation control system for Dongfanghong X-804 tractor [J]. Transactions of the Chinese Society of Agricultural Engineering, 2009, 25(11): 139-145.
[20]翟衛欣, 王東旭, 陳智博, 等. 無人駕駛農機自主作業路徑規劃方法[J]. 農業工程學報, 2021, 37(16): 1-7.Zhai Weixin, Wang Dongxu, Chen Zhibo, et al. Autonomous operation path planning method for unmanned agricultural machinery [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(16): 1-7.