一種改進非線性模型預測軌跡跟蹤控制方法研究
2023-12-12 03:00:56李文超劉美如
重慶理工大學學報(自然科學) 2023年11期
李文超,劉美如,丁 華,梁 軍,張 春
(1.江蘇大學 汽車與交通工程學院, 江蘇 鎮江 212013;2.江蘇大學京江學院, 江蘇 鎮江 212013;3.江蘇大學 汽車工程研究院, 江蘇 鎮江 212013;4.寶勝系統集成科技股份有限公司, 江蘇 揚州 225800)
0 引言
隨著社會的快速發展,汽車保有量大幅上升,進而導致交通擁堵愈發嚴重,交通事故頻發。為緩解目前交通的擁堵現狀,提高行車效率與安全性,智能輔助駕駛技術成為當下的研究熱點[1]。目前,對智能輔助駕駛技術的研究主要包括環境感知、決策、規劃與控制等方面。其中,軌跡跟蹤控制是車輛控制的重要部分[2]。在狹窄場景中,車輛運動空間有限并與障礙物距離較近,容易在車輛行進過程中造成擦碰。因此,進行精準且穩定的車輛控制是智能輔助駕駛技術的重中之重。
當前,智能車輛軌跡跟蹤控制大致可分為傳統的控制方法以及最優控制方法。傳統的控制方法主要包括預瞄駕駛員模型[3-5]、PID控制[6-8]以及滑模控制[9-11]等。Chen等[12]設計了一種BP神經網絡和PID控制相結合的控制方法并利用遺傳算法(GA)優化BP神經網絡,從而提高了系統的魯棒性以及收斂精度與速度。Wu等[13]結合滑模控制和模型預測控制,提出了一種魯棒的滑模預測控制器,確保系統在各種約束下性能控制最優,從而提高智能車輛實時路徑跟蹤性能。然而,PID是一種無模型的控制方法,在一些復雜、非線性場景下,其跟蹤精度較低。同時,滑模控制對于復雜系統的不匹配干擾處理較為困難,難以設計其穩定性趨近率,因此不能達到很好的跟蹤效果。
最優控制方法一般包括模型預測控制(MPC)[14-18]以及非線性模型預測控制(NMPC)[19-22]兩類。目前,模型預測控制方法具有較好的控制效果。該方法允許模型存在誤差,并能夠通過修正預測模型來有效處理模型適配、干擾引起的系統不穩定問題。因此,基于MPC的車輛跟蹤控制是當前的研究熱點之一。狹窄車位條件下,為了確保可靠的防碰撞動作,MPC在很大程度上取決于所構建的車輛模型[23]。非線性車輛模型可以為控制開發提供更好的車輛模型[24]。針對泊車參考路徑的曲率和航向角較大等問題,Yin等[25]提出采用離散的預覽點進行路徑跟蹤的非線性模型預測控制,并采用車輛位置與預覽點切線的垂直距離來評估跟蹤誤差。采用線性化模型作為預測模型會導致跟蹤誤差較大[26],而采用非線性預測模型可以提高預測時域內估計值的準確性,但相對前者其計算復雜度增加。非線性預測模型的使用會導致嚴重的計算負擔,進而難以保證其控制的實時性。針對上述非線性預測模型應用中存在的局限性,Chen等[27]提出一種基于開放封閉原則(OCP)稀疏結構的壓縮算法,在壓縮離散化節點數方面,實現了由二次壓縮轉換至線性壓縮,進而降低了其計算復雜度。Son等[28]提出了利用移動分塊MPC的半顯式方法來解決一個簡化的在線優化問題。該方法雖然通過離線來求解出分塊位置,但仍為固定矩陣分塊的方法,難以很好的優化一個動態過程。因此,本文中提出了一種改進的NMPC控制器設計方法,用于車輛在狹窄車位下的非線性軌跡跟蹤控制。
1 非線性預測模型建模
非線性模型預測控制方法通常將輸入量和狀態量一同作為決策變量,將模型的狀態方程作為非線性約束,再根據實際情況構建目標函數。然后,對該目標函數進行最優化求解,得到最優控制量作用于被控系統,進而車輛依據函數輸出量做出航向調整的一個循環推進的過程。在狹窄停車場環境下,車輛行駛以及倒車入庫過程中容易發生車頭或車尾擦碰,為提高車輛行駛和泊車的安全性,需要搭建較高精度的車輛模型。因此,本節針對車輛前進和倒車2種運動方式,分別搭建了相應的預測模型,并采用改進的二階龍格庫塔方法對其進行離散化處理,以提高軌跡跟蹤精度。
1.1 簡化的運動學模型
泊車是一個低速行駛的過程,此時認為4個車輪是純滾動的而不發生滑移現象[29-30]。一般而言,車輛形狀大多具備非線性特性,難以對其做到精確建模[31]。因此,本文中將模型簡化,將四輪模型簡化為二輪模型以構建車輛運動學模型,如圖1所示。
[xyφ]T=[cosφsinφtanδf/l]T*ds
(1)
式中:φ航向角為X軸與車軸線的夾角;(x,y,φ)為車輛的狀態量;r和f為車輛后軸與前軸中點;l為車輛軸距;δf為前輪轉角, ds表示在dt時間內走過的距離。
1.2 車輛前進運動學模型建模
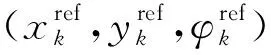
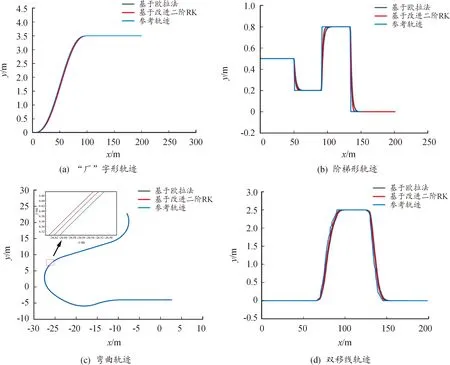
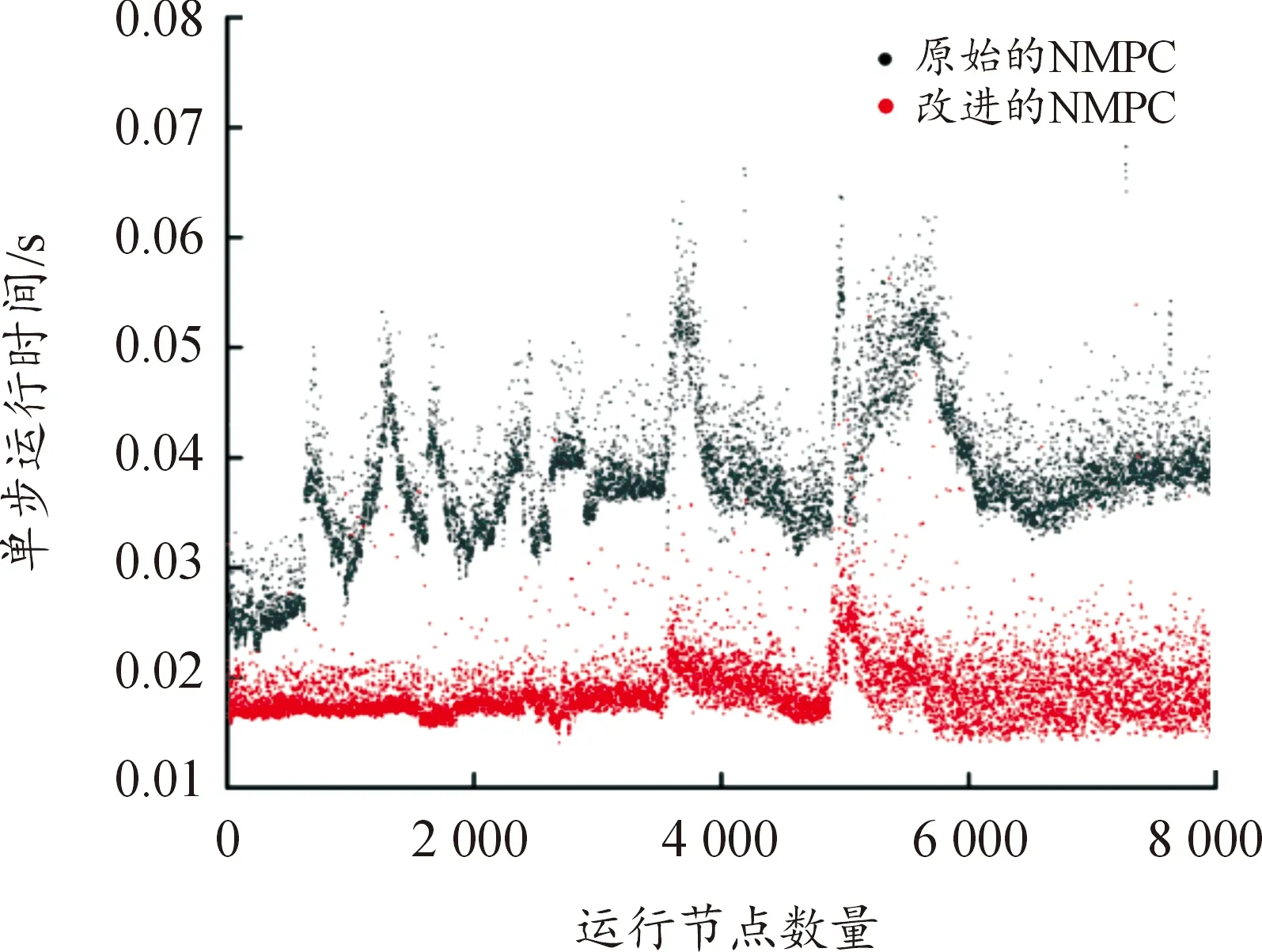
為增加預瞄點位置的精確性,在模型搭建過程中將原本單一采樣時間轉換成可變采樣時間T(k)(1 ds=v*dt=v*T(k) (2) 針對狹小停車空間場景,為了確保車輛實現可靠的防碰撞動作,需要對車輛進行較高精度的分析,搭建更貼合實際的車輛模型。因此,采用龍格庫塔(Runge-Kutta)的內迭代法來有效提升建模精度。RK方法是通過計算若干采樣點的斜率來構建更高精度的積分計算,利用泰勒級數展開進行數值求解[32]。 (3) (4) q1=f(x,y) (5) (6) 通過式(4)—式(6)對車輛的橫、縱坐標以及航向角進行離散化處理: 式中,k=0,1,2,…,Np-1。Np為預測時域。 每次采樣時車輛的當前狀態有橫坐標xk,縱坐標yk,航向角φk,前輪轉角δk。若已有一組控制序列[δ1,δ2,δ3…δn],代入式(7)便可得每個采樣時刻的航向角,繼而獲得相應的橫、縱坐標,從而預測到未來的節點狀態。 對于車輛倒車運動,車速極低,因此視車輛后軸縱向速度為0,滿足: (8) 前軸中心點(xf,yf)的位置關系為: (9) 將式(9)求導并代入式(8),且X軸與vf的夾角為φ-δf,因此倒車運動學模型為: [cos(φ-δf) sin(φ-δf) -sinδf/l]T*v (10) 同理,進行離散化處理可得: (11) 根據車輛3自由度運動學模型,選取當前車輛橫坐標、縱坐標、航向角、縱向速度,參考路徑的橫坐標、縱坐標、航向角為輸入參數,前輪轉角為輸出參數。 滾動優化是一種通過最優相應時刻的性能指標,比如最小誤差、最小控制能量等來獲得系統最優控制輸入的方法。該方法的核心為在采樣周期內考慮車輛當前狀態,在線滾動式求解有限時域內的開環最優問題,得出最優控制序列,并將該控制序列的第一個變量作用于被控系統,使得控制系統在下一采樣周期既有前饋補償又有當前狀態量的反饋補償,從而提升車輛控制的精確性。 移動分塊策略是一種針對最優控制問題降低目標函數輸入量自由度的優化方法,即在預測范圍內采用固定分塊模式優化輸入量來降低控制器求解的復雜度[33]。該方法通過塊約束目標函數的輸入量,來減少優化求解中獨立的變量個數以降低控制器的計算負擔。非線性模型預測控制方法只將控制增量序列的第一個元素作用于系統,因此本文采用移動分塊矩陣對控制增量進行塊約束,以實現精確計算第一個元素而模糊計算其他元素,減少獨立輸入量,降低計算負擔。目前來看,車輛控制方面利用移動分塊矩陣的研究較少,主要為“平均化”矩陣和“前疏后密”矩陣。進一步的,相關的研究大多未考慮到非線性因素,難以保證研究的可行性。因此,本文基于非線性模型預測控制方法,利用大量試驗來確定移動分塊矩陣。 移動分塊策略采用較小的塊對前端的控制變量進行約束以保證軌跡跟蹤的精確性,采用較大的塊對后端的控制變量進行約束以降低最優化函數的求解復雜度。在本文中,ΔUk為控制范圍內的控制輸入序列,其值越小表示車輛的實際坐標離參考坐標越近,跟蹤效果越好。控制增量ΔUk定義為: ΔUk=[ΔukΔuk+1… Δuk+Nc-1]T (12) 選取式(12)控制增量序列的第一個元素作為實際控制增量輸入,作用于被控系統,則系統實際的控制量uk為: (13) 在下一控制周期,同步向前推進優化時段,從而實現最優控制問題的在線滾動計算。 式(12)中,控制時域Nc=9,待求解的獨立控制量數目為9。隨著Nc的值增大,控制器的軌跡跟蹤精度也逐漸升高,但控制器優化時計算量急劇增加。因此,提出獨立控制增量ΔUn,其為通過塊約束形式對控制增量ΔUk進行簡化,ΔUn形式如下: ΔUn=[Δu1Δu2… ΔuNd]T (14) 式中,Nd ΔUkn=G*ΔUn (15) 式中:ΔUkn為分塊矩陣約束后的控制增量;ΔUn為獨立控制增量;G為分塊矩陣,矩陣規模為Nc*Nd,其功能是縮減獨立控制量個數。該矩陣的取值形式隨分塊方法不同而不同,Abdul等[34]將Δu5之后控制量都取相同的值,G取值如下: 以該取值形式的分塊矩陣為例,對原始的控制增量進行塊約束后得到ΔUkn的形式如下: (16) G將Δu5、Δu6、Δu7、Δu8、Δu9約束成相同的值,自由度由9降低至5,從而節省計算成本。然而,此類固定分塊方法只能有限的降低求解負擔,還會導致塊約束后的輸出值不能很好反應原本的控制量,產生較大的偏差。針對該方法存在的局限性,本文提出改進的移動分塊策略,即采用一個動態的移動分塊矩陣集合Gi,i=1,2,3,4,對控制量滾動式約束。Gi取值如下: 動態移動分塊矩陣選取原則: (17) 按照上述原則選取相應的分塊矩陣。首先,采用G1矩陣,使得Δu2=Δu3=Δu4=Δu5=Δu6,即降低了目標函數輸入為Δu3至Δu6時刻的求解復雜度;在當前目標函數求解周期中,當采樣時刻k=3,即求解第三個采樣點的最優解時刻,轉而采用G2矩陣,使得Δu3=Δu4=Δu5=Δu6=Δu7,從而降低代價函數輸入為Δu4至Δu7時刻的求解復雜度。同理,采用G3、G4矩陣相應降低后續元素的求解復雜度。綜上,在優化目標函數輸入量方面,將原來的固定移動分塊矩陣轉為控制器一次求解周期里的四次矩陣,即在目標采樣點求解時采用相應的分塊矩陣,繼而循環推進該四次矩陣,對控制量進行滾動約束以提升控制器的求解效率。因此,與ΔUk相比,通過改進后獲得的ΔUkn無需在每個變量處進行優化求解,其控制變量自由度的減少降低了控制器的求解負擔,提高了求解效率。 根據上述非線性預測模型及分塊策略,綜合考慮車輛行駛的跟蹤性能與平穩性,最小化位置誤差、航向誤差以及前輪轉角增量,在每一個步長內最優化目標函數。構造的優化函數如下: (18) 受車輛自身條件限制,在路徑跟蹤控制器的優化求解問題中,參數取值存在范圍約束。若參數取值超出車輛的限制條件則易導致危險事故發生,因此需要對車輛部分參數進行如下約束: (19) 上述優化模型針對的是帶約束的非線性優化問題,本文采用Matlab非線性求解器對該模型進行優化求解。 為了驗證控制器的跟蹤性能,基于Carsim與Matlab/Simulink搭建平臺進行仿真實驗,實驗場景為小型停車場,考慮安全因素,設置車輛速度限制為3.6 km/h。本文首先基于Carsim搭建整車模型并導入至Matlab/Simulink仿真平臺,車輛部分參數如表1所示。 表1 車輛部分參數 本研究針對狹窄車位進行仿真實驗。在可泊車條件下,車輛一次性由前進擋轉為倒車擋駛入車位到達目標點,此時存在一個空間約束,即最小泊車車位約束。通過分析車位的幾何關系可計算得最小泊車車位的長度為4.992 m,寬度為2.045 m。進一步的,考慮到實際城市內常見狹窄停車位的大小,本文將最小車位設置為5 m×2.5 m。另外,仿真實驗以在停車場環境下采用混合A*規劃的路徑以及給定節點坐標的擬合路徑作為導航參考路徑,基于兩類參考路徑條件下評估控制器的跟蹤精度與控制效率。 以參考路徑為變量進行多次試驗,參考路徑有“廠”字形,雙移線道路,彎曲形以及階梯形等擬合路徑和采用混合A*算法規劃的路徑。此處仿真工況為擬合的參考路徑,將參考軌跡與采用2種不同的離散化方法獲得的車輛實際跟蹤軌跡進行對比分析,驗證控制器的軌跡跟蹤性能。如圖2所示,相較于歐拉法離散車輛模型,本文中提出的基于改進二階RK方法進行離散化的控制方法可以更加精確地跟蹤參考軌跡,提高跟蹤精度。 圖2 軌跡跟蹤效果 進行垂直車位泊車,往往需要倒車入庫,現存的倒車技術仍存在諸多問題。本文中通過對倒車運動學模型建模并離散化處理,進而利用非線性模型預測控制來實現對車輛的控制。 圖3中的3條軌跡(黑線)均采用混合A*算法規劃產生。圖3(a)表示不含倒車預測模型的NMPC控制器的跟蹤效果。由圖3(a)可知,在前進路段,控制器同樣具有良好的跟蹤效果。然而,在倒車路段,車輛仍是正向行駛,控制器并不能跟蹤參考軌跡。針對此問題,本文增加對倒車軌跡預測運動學的建模,并基于NMPC控制器進行仿真試驗。如圖3(b)所示,針對同一參考軌跡,所提控制器可以實現很好的跟蹤效果。如圖3(c)(d)所示,進行多次仿真試驗,所提控制器均能夠實現良好的全程跟蹤效果。 圖3 前進加倒車入庫效果 在跟蹤雙移線軌跡(圖2(d))實驗方面,圖4為基于無矩陣、固定矩陣以及本文中提出的動態矩陣控制方法的單步節點運行時間的對比圖。由圖4以及表2可以看出,基于固定矩陣控制方法的運行時間提升27.57%,基于動態矩陣控制方法的運行時間提升了38.96%,采用動態矩陣對控制量進行約束得到的效果更為明顯。 圖4 控制器單步節點運行時間 表2 單步運行時間對比 基于本文中所提的控制方法進行軌跡跟蹤,路徑跟蹤結果如圖5所示。圖5(a)(b)(c)分別為跟蹤圖3(b)(c)(d)的橫向誤差。在最大橫向誤差以及平均誤差方面,所提改進方法表現更好,精度更高。 圖6(c)為路徑規劃模塊獲得的軌跡4以及對該軌跡的跟蹤效果。圖6(a)和(b)分別為前饋PID控制器、原始NMPC控制器、預瞄NMPC控制器以及本文改進的NMPC控制器等4類控制器的航向誤差和橫向誤差對比。從圖6(a)(b)能夠看出,本文改進的NMPC控制器的控制效果最好,跟蹤精度最高。圖6(d)表示跟蹤軌跡4的單步節點運行時間,采用散點圖可以明顯的展示出時間的差異性。因此,相較于原始NMPC算法,本文提出的改進NMPC控制方法可以大大提高控制器的求解效率。 圖5 橫向誤差對比 圖7為跟蹤梯形軌跡的控制器單步運行時間散點圖。由圖7可得,本文中所提出的控制算法大大提高了計算效率,降低了計算負擔。 圖7 跟蹤梯形軌跡單步運行時間散點圖 表3為3類控制方法的平均運行時間。由該表可知,相較于原始NMPC,本文中提出的控制方法就“廠”字形軌跡(圖2(a))和梯形軌跡 (圖2(b)),效率分別提高了9.9%、28.7%。 表3 節點平均運行時間對比 1) 針對小型停車場車輛運動空間狹小、停車難、易發生事故等問題,提出一種非線性模型預測控制方法,具有一定的可行性與實際意義。 2) 針對控制精度問題,基于NMPC控制方法,建立了車輛前進與倒車的運動學模型并采用改進的二階RK方法對其進行離散化處理。 3) 針對計算負擔問題,提出了一種動態移動分塊矩陣策略對控制量進行模糊-精確約束,以減少獨立輸入量的數目,從而提高求解效率。 4) 移動分塊矩陣雖然可以降低目標函數的求解復雜度,但是也會影響控制器的吸引域(ROA),使系統難以穩定以致無法求解。本文中并未考慮到其遞歸可行性,未來研究將考慮系統穩定性等多方面的影響因素,選擇更合適的塊結構以提升控制器的求解效率。


1.3 車輛倒車運動學模型建模
2 滾動優化
2.1 動態移動分塊矩陣策略

2.2 目標函數與約束條件
3 仿真計算分析

3.1 多種前進軌跡跟蹤效果
3.2 包含倒車軌跡跟蹤效果

3.3 動態移動分塊矩陣性能


3.4 跟蹤誤差及效率


4 結論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50數學物理學報(2020年2期)2020-06-02 11:29:24兒童故事畫報(2019年5期)2019-05-26 14:26:14光學精密工程(2016年6期)2016-11-07 09:07:19Coco薇(2016年2期)2016-03-22 02:42:52核科學與工程(2015年4期)2015-09-26 11:59:03Coco薇(2015年1期)2015-08-13 02:47:34小雪花·成長指南(2015年7期)2015-08-11 15:03:12小雪花·成長指南(2015年4期)2015-05-19 14:47:56
