考慮二次排隊的智能網(wǎng)聯(lián)車生態(tài)駕駛策略
2023-12-12 12:31:58孫崇效李昕光于文昌
交通運輸工程與信息學(xué)報 2023年4期
孫崇效,李昕光,胡 含,于文昌
(青島理工大學(xué),機械與汽車工程學(xué)院,青島 266000)
0 引言
步入21 世紀(jì)以來,我國居民出行需求急劇增長,機動車保有量大幅上升,由此交通運輸行業(yè)燃油消耗量和污染物排放量快速增加,因此,有效降低交通運輸造成的燃油消耗及污染物排放是迫切需要解決的問題。相較于研發(fā)新能源汽車、改善交通管理方式和優(yōu)化信號配時[1]等方法,生態(tài)駕駛具有較低的應(yīng)用成本和顯著的節(jié)能減排效果,因此被廣泛應(yīng)用于減少能源消耗的問題上,其主要方式是在不改變車輛結(jié)構(gòu)的前提下,通過智能網(wǎng)聯(lián)技術(shù)對車輛運行速度引導(dǎo)[2-4]來避免車輛產(chǎn)生的急加減速現(xiàn)象,從而減少燃油消耗量和污染物排放。
目前,交叉口生態(tài)駕駛策略研究集中于通過V2I 通信技術(shù)獲取道路環(huán)境與車輛信息[5-7],為車輛提供最優(yōu)駕駛軌跡,達到減少燃油消耗的效果。如,Barth 等[8]為引導(dǎo)車輛以高效率、低能耗車速通過交叉口設(shè)計了加速度可變的三角函數(shù)速度曲線模型;靳秋思等[9]基于機動車比功率提出了一種減少車輛不必要加減速次數(shù)的生態(tài)軌跡優(yōu)化算法;Hao 等[10]提出一種自適應(yīng)信號配時的生態(tài)駕駛系統(tǒng),根據(jù)信號燈時序優(yōu)化車輛速度軌跡,引導(dǎo)車輛通過交叉口;Osman D 等人[11]提出了具有“巡航、加速、減速、停車”四個階段的Glide Path軌跡優(yōu)化方法,該方法能夠保證車輛速度和加速度的連續(xù)性,使得車輛軌跡更加平滑。然而,針對單車的生態(tài)駕駛軌跡優(yōu)化研究容易忽略其他車輛對目標(biāo)車輛的干擾,所以有必要在生態(tài)駕駛策略中考慮排隊車輛等影響因素,進一步完善交叉口場景。
車輛排隊現(xiàn)象易出現(xiàn)交通流量較大的交叉口場景中,故在進行車速引導(dǎo)過程中需要考慮前方車輛排隊長度問題。如,黃意然等[12]基于構(gòu)建的車輛排隊場景提出了“單次踏板”的交叉口生態(tài)駕駛軌跡優(yōu)化模型,并分析了不同場景參數(shù)對駕駛員操作容錯性和目標(biāo)車輛的CO2排放的影響;楊祥宇[13]針對非飽和交叉口,提出一種基于排隊長度預(yù)測的交叉口上游生態(tài)駕駛算法,并通過三角函數(shù)速度曲線對交叉口上下游控制路段進行優(yōu)化;于少偉等[14]以燃油經(jīng)濟性與通行能力為目標(biāo),提出一種利用通行能力余量的生態(tài)駕駛模型,該模型通過感知信息求解獲取車輛行駛速度曲線,引導(dǎo)車隊平滑地通過各個交叉口。上述研究豐富了交叉口處存在車輛排隊現(xiàn)象的生態(tài)駕駛策略,但有必要對交叉口處車輛二次排隊與目標(biāo)車輛在進入交叉口時初速度不同的情況進行研究,對于人工駕駛車輛,車輛起步時駕駛員反應(yīng)時間對排隊車輛的影響也應(yīng)加以考慮。
綜上所述,本文構(gòu)建了考慮駕駛員反應(yīng)的交叉口處排隊車輛的改進IDM 跟馳模型,使車輛的行駛更符合實際駕駛情況。同時,為減少交叉口場景下車輛二次排隊的燃油消耗和污染物排放,提出了一種考慮二次排隊的智能網(wǎng)聯(lián)車生態(tài)駕駛策略,該策略根據(jù)車輛排隊現(xiàn)象分為前方車輛在綠燈時間清空和前方車輛二次排隊兩種情況,智能網(wǎng)聯(lián)車會根據(jù)情況選擇通過交叉口方式,最后基于選擇結(jié)果優(yōu)化車輛行駛軌跡,降低車輛油耗和污染物排放。
1 交叉口場景構(gòu)建
本文構(gòu)建的交叉口場景如圖1所示,若干輛人工駕駛車輛(綠車)在交叉口上游車速引導(dǎo)區(qū)排隊,車隊尾車后方有一輛智能網(wǎng)聯(lián)車輛(白車)駛向交叉口。當(dāng)交叉口信號燈變?yōu)榫G燈時,所有排隊車輛會加速至最大速度通過交叉口。

圖1 交叉口場景Fig.1 Intersection scenes
交叉口場景設(shè)置為:
(1)研究場景為單一交叉口,車道為雙向兩車道,道路存在最高、最低限速,不支持車輛換道;
(2)不考慮道路環(huán)境中行人、非機動車的影響;
(3)軌跡優(yōu)化的目標(biāo)車輛為智能網(wǎng)聯(lián)車輛,車速引導(dǎo)范圍為交叉口上游車速引導(dǎo)區(qū)與下游車速恢復(fù)區(qū),排隊車輛為具備網(wǎng)聯(lián)功能的人工駕駛車輛,所有車輛均為燃油車;
(4)交叉口智能設(shè)施可以通過V2I技術(shù)獲取交叉口信號配時、車輛運動狀態(tài)信息和排隊車輛數(shù),將優(yōu)化結(jié)果傳遞給目標(biāo)車輛,使目標(biāo)車輛按照引導(dǎo)速度行駛。
2 生態(tài)駕駛策略構(gòu)建
2.1 排隊車輛跟馳模型
IDM(Intelligent Driver Model)模型[15]反映了不同場景下車輛的期望車頭時距,該模型能夠使車輛在跟馳過程中平穩(wěn)地改變加速度大小,具有較強的穩(wěn)定性。為更加貼近實際情況,本文考慮駕駛員反應(yīng)時間對駕駛行為的影響,對傳統(tǒng)IDM跟馳模型進行改進,改進后的公式如下:
式中:a為車輛加速度,m·s-2;amax為自車的最大加速度,m·s-2;ν為自車當(dāng)前車速,m·s-1;ν0為自車的期望車速,m·s-1;Δν為自車與前車的速度差,m·s-1;s為當(dāng)前自車與前車的車距,m;s*(ν0,Δν)為期望跟車距離,m;s0為最小車間距,m;τ為駕駛員反應(yīng)時間,s;T為安全車頭時距,s;b為舒適減速度,m·s-2;h為車頭間距,m;l為車身長,m。
排隊車輛在起步過程中,后車駕駛員從發(fā)現(xiàn)前車移動到啟動車輛需要一定的反應(yīng)時間,排隊車輛消散時間為綠燈開始時刻到排隊尾車通過交叉口停止線的時間,公式如下:
2.2 目標(biāo)車輛車速誘導(dǎo)生態(tài)駕駛策略
目標(biāo)車輛進入交叉口上游車速引導(dǎo)區(qū)域后,上傳車輛的位置和速度信息,交叉口智能設(shè)施獲取當(dāng)前的信號配時、車輛排隊長度等信息估計排隊車輛消散時間,將生態(tài)駕駛策略分為前方車輛在綠燈時間清空和前方車輛二次排隊兩種情況。智能設(shè)施會根據(jù)計算結(jié)果要求目標(biāo)車輛加速、勻速、減速或停車,直至通過交叉口,并在交叉口下游速度恢復(fù)區(qū)的某一位置將目標(biāo)車輛恢復(fù)到初始車速。
2.2.1 前方車輛在綠燈時間清空
目標(biāo)車輛以初始速度νc駛?cè)虢徊婵谝龑?dǎo)區(qū)時,此時目標(biāo)車輛距離交叉口的距離為d,車輛勻速通過交叉口的時間為d/νc。當(dāng)排隊車輛可以在綠燈結(jié)束前消散,即,此時存在綠燈時間使得目標(biāo)車輛在第一個信號周期跟隨前方排隊車輛通過交叉口。為保證燃油經(jīng)濟性,目標(biāo)車輛駕駛方式優(yōu)先級由高至低為:勻速、減速、加速[16]。目標(biāo)車輛通過交叉口場景如圖2所示。

圖2 目標(biāo)車輛通過交叉口示意圖Fig.2 Schematic of target vehicle through intersection
(1)目標(biāo)車輛勻速通過
綠燈剩余時間內(nèi)目標(biāo)車輛可以保持初速度νc勻速通過,該工況判別式為:
此時車輛在交叉口上游和下游區(qū)域都按照初速度行駛,燃油經(jīng)濟性最高。
(2)目標(biāo)車輛減速后勻速通過
目標(biāo)車輛保持初速度νc勻速行駛會與前方排隊車輛發(fā)生交通沖突,則目標(biāo)車輛需要減速至理想車速νd行駛,νd取值范圍為νd∈[νmin,νc],此時目標(biāo)車輛工況判別式為:
車輛行駛速度軌跡的兩種邊界情況由兩個參數(shù)定義,即加速度和車輛到達交叉口停止線的速度。第一種邊界情況是車輛花費最少的時間采用最大減速度進行減速,第二種邊界情況是車輛在整個交叉口上游車速引導(dǎo)區(qū)以最小減速度進行減速,所以速度軌跡需滿足以下條件:
式中:νd為車輛減速達到的理想車速,m·s-1;ad為目標(biāo)車輛減速度,m·s-2;td為目標(biāo)車輛減速時間,s;tu為目標(biāo)車輛勻速行駛時間,s;νmin為道路最低限速,m·s-1;amin為車輛最大減速度,m·s-2。
(3)目標(biāo)車輛加速通過
目標(biāo)車輛需要加速至理想車速νa才能跟隨前車在綠燈結(jié)束前通過,νa取值范圍為νa∈[νc,νmax],此時目標(biāo)車輛工況判別式為:
速度軌跡滿足條件如下:
式中:aa為目標(biāo)車輛加速度,m·s-2;νmax為道路最高限速,m·s-1;ta為目標(biāo)車輛加速時間,s;amax為車輛最大加速度,m·s-2。
2.2.2 前方車輛二次排隊
當(dāng)排隊車輛在第一個綠燈時間無法完全消散,交叉口處出現(xiàn)車輛二次排隊,則目標(biāo)車輛減速行駛,交叉口處車輛排隊消散時間重新估算。該工況分為兩種情況:
(1)目標(biāo)車輛減速后勻速通過
此時判斷車輛保持低速行駛便能夠通過交叉口,該工況判別式為:
(2)目標(biāo)車輛減速停車
目標(biāo)車輛以速度νc駛?cè)虢徊婵冢詼p速度ad減速至最小速度νmin行駛,然后以減速度ad減速至停車;當(dāng)?shù)诙€綠燈時間出現(xiàn),目標(biāo)車輛以加速度aa加速到速度νc駛離交叉路口,交叉口場景如圖3所示。

圖3 目標(biāo)車輛停車后通過交叉口示意圖Fig.3 Schematic of target vehicle passing intersection after stopping
當(dāng)?shù)谝粋€綠燈時間排隊車輛無法消散,目標(biāo)車輛繼續(xù)保持低速行駛會與排隊車輛沖突,車輛會減速加入排隊車隊,該工況判別式為:
式中:tu為目標(biāo)車輛勻速行駛時間,s;ts為目標(biāo)車輛停止時間,s;td1為目標(biāo)車輛第一次減速時間,s;td2為目標(biāo)車輛第二次減速時間,s;νb為目標(biāo)車輛在不同時刻的速度,m·s-1。
2.3 軌跡生成算法
為了使車輛能夠順利駛過交叉口,車輛在進入交叉口上游車速引導(dǎo)區(qū)時就需要適當(dāng)?shù)募铀倩驕p速。本文采用Barth 教授提出的三角函數(shù)速度曲線模型,適用于加速后勻速通過與減速后勻速通過兩種情況:
式中:νg為目標(biāo)平均速度,m·s-1;νx為目標(biāo)平均速度νg與當(dāng)前車速νc之差,m·s-1;t為車輛運動過程的時刻,s;T為安全車頭時距,s。
為使目標(biāo)車輛不影響交叉口處的通行效率,規(guī)定車輛消散后,目標(biāo)車輛會緊跟前方車隊通過,μ和ρ為求解參數(shù),車速曲線需要滿足如下約束條件:
由于道路存在最高與最低限速,當(dāng)三角函數(shù)速度曲線模型的勻速段速度νopt(t)≤νmin或νopt(t)≥νmax時,目標(biāo)車輛減速段將采用基于二階多項式的車輛減速模型[17],該模型減速過程中車輛的加速度數(shù)值變化曲線近似于一元二次函數(shù);目標(biāo)車輛加速段采用基于指數(shù)擬合的車輛加速模型,通過收集車輛速度和加速度數(shù)據(jù),利用自然指數(shù)e擬合表達加速度與速度正向關(guān)系[18]。當(dāng)目標(biāo)車輛選擇減速停車通過方式時,兩種模型分別用于目標(biāo)車輛減速段與加速段,表達式為:
對于配備該算法的智能網(wǎng)聯(lián)車,當(dāng)車輛到達上游車速引導(dǎo)區(qū)時,算法被激活,交叉口智能設(shè)施通過當(dāng)前的信息計算前方車輛消散時間。當(dāng)前方車輛可以在綠燈時間清空,智能設(shè)施會根據(jù)判斷條件選擇勻速、減速或加速方案;當(dāng)前方車輛二次排隊,智能設(shè)施會根據(jù)判斷條件選擇減速或停車方案。交叉口智能設(shè)施確定目標(biāo)車輛行駛方案后,通過三角函數(shù)速度曲線模型計算車輛速度曲線,并判斷速度曲線勻速段是否符合道路限速要求。當(dāng)速度曲線勻速段符合道路限速要求,交叉口智能設(shè)施會通過三角函數(shù)速度曲線引導(dǎo)目標(biāo)車輛通過交叉口;反之,交叉口智能設(shè)施會采用公式(18)、(19)重新計算車輛速度曲線,依照新曲線引導(dǎo)目標(biāo)車輛通過交叉口。
為了保證車輛在運動過程中的安全性,目標(biāo)車輛在行駛過程中與排隊尾車的距離要大于最小安全車距,當(dāng)目標(biāo)車輛進入上游車速引導(dǎo)區(qū)且排隊尾車未移動時,目標(biāo)車輛行駛距離不大于目標(biāo)車輛與排隊尾車的最大間距;當(dāng)排隊尾車移動后,即目標(biāo)車輛行駛距離不大于排隊尾車行駛距離與目標(biāo)車輛與排隊尾車的最大間距之和,具體約束條件如下:
式中:s0表示最小車間距,m;xi表示第i次車輛排隊長度,m;τ表示駕駛員反應(yīng)時間,s;d表示目標(biāo)車輛距離交叉口的距離,m。
在實際過程中,由于駕駛員反應(yīng)時間的不同,排隊車輛消散時間會有輕微波動,目標(biāo)車輛按照優(yōu)化軌跡行駛的過程中,可能出現(xiàn)與排隊末尾車輛的車距小于最小安全車距的問題,此時目標(biāo)車輛將會棄用當(dāng)前行駛方案并迅速減速,切換為IDM 模型跟馳前方車輛行駛。生態(tài)駕駛策略流程如圖4所示。
3 仿真實驗及結(jié)果分析
3.1 仿真設(shè)置
SUMO(Simulation of Urban Mobility)可以通過Traci 接口使用Python 語言實現(xiàn)模型開發(fā),實現(xiàn)對目標(biāo)車輛的精準(zhǔn)控制。本文應(yīng)用SUMO 對提出的生態(tài)駕駛策略在單個信號交叉口場景進行了仿真研究,并評估優(yōu)化前后目標(biāo)車輛行駛軌跡以及車輛通過停止線的時間、油耗、排放三個影響因素的優(yōu)化效果。實驗參數(shù)如表1所示。
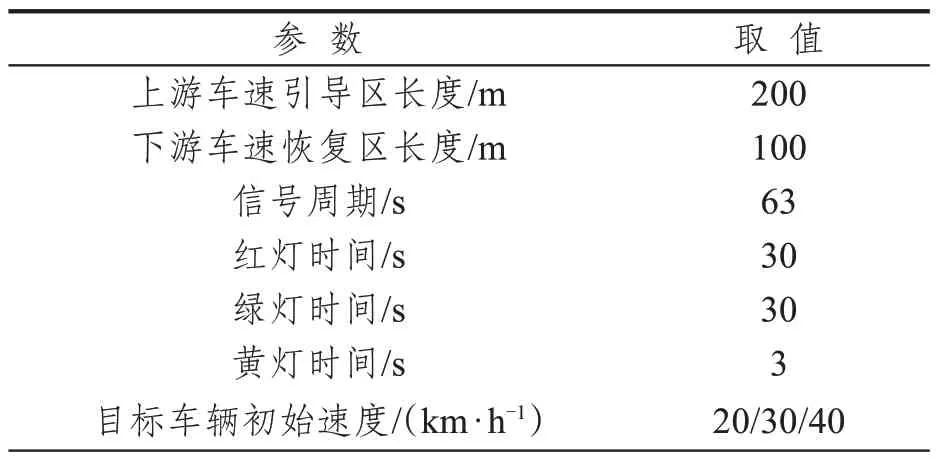
表1 仿真實驗參數(shù)Tab.1 Simulation experiment parameters
選取基于VSP(Vehicle Specific Power)的油耗測算模型[19-20]對目標(biāo)車輛仿真過程的總油耗進行測算,本文仿真對象為輕型車,在不考慮道路坡度的條件下,VSP的計算公式為:
式中:ν表示車輛瞬時車速,m·s-1;a表示車輛瞬時加速度,m·s-2。
瞬時油耗與車速具有相關(guān)性,可以通過車輛逐秒的VSP 數(shù)據(jù)進行聚類分析得到VSP 區(qū)間[21]。聚類區(qū)間與燃油排放率、CO2、CO、HC、NOx排放量間關(guān)系如表2所示,其總?cè)加拖挠嬎愎綖椋?/p>
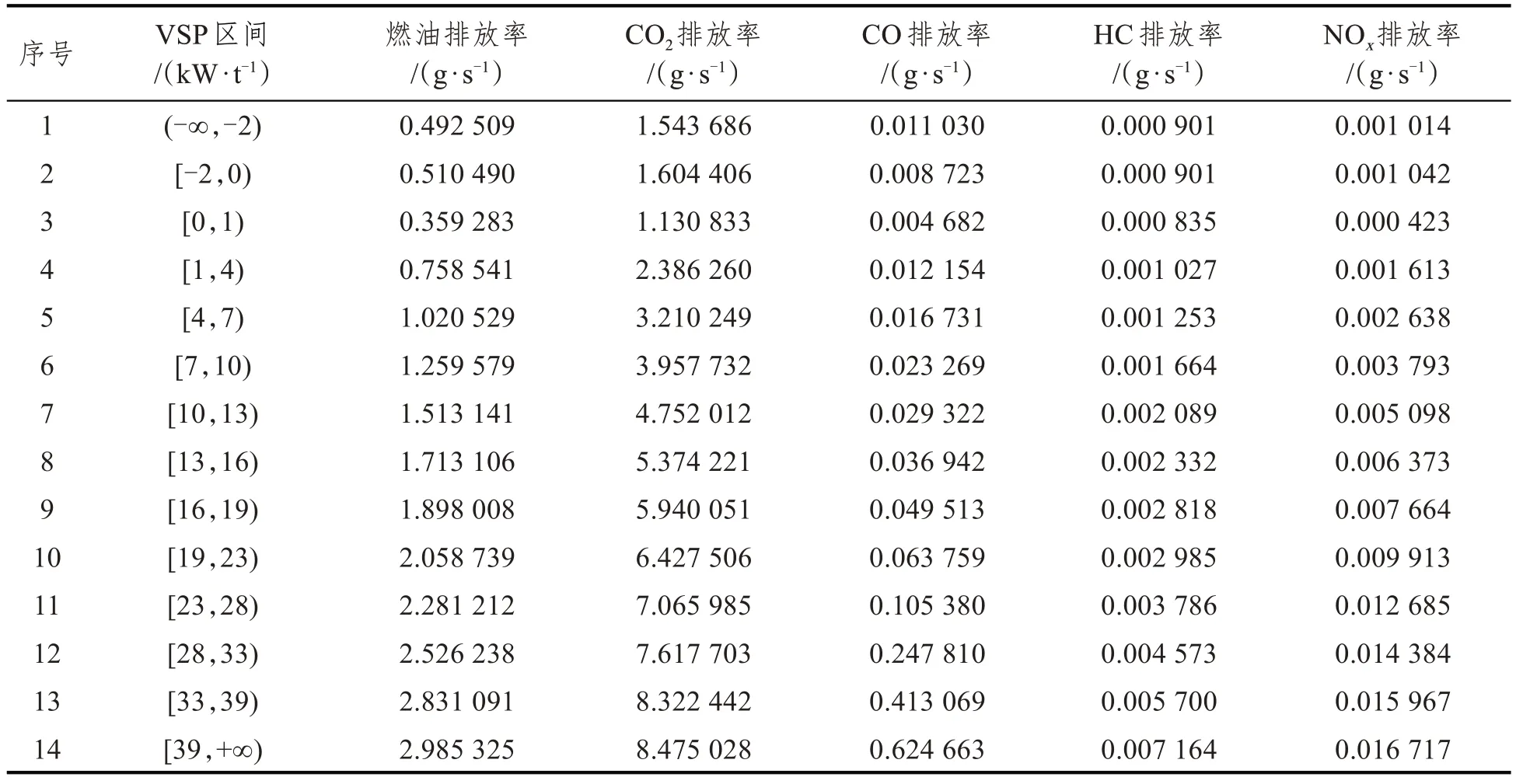
表2 不同VSP區(qū)間與燃油排放率、CO2、CO、HC、NOx排放量間的關(guān)系Tab.2 Relationship between different VSP intervals and fuel emission rate,CO2,CO,HC,and NOx emissions
式中:n表示VSP 區(qū)間的個數(shù);fi表示VSP 區(qū)間是i的燃油排放率,g·s-1;Fm表示某段時間內(nèi)的車輛總油耗,g;Νi表示VSP區(qū)間是i的總時間,s。
3.2 仿真結(jié)果分析
將仿真得到的生態(tài)駕駛數(shù)據(jù)與自由駕駛數(shù)據(jù)進行整合,得到優(yōu)化前后目標(biāo)車輛行駛軌跡,如圖5所示。

圖5 優(yōu)化前后目標(biāo)車輛行駛軌跡Fig.5 Target vehicle trajectory before and after optimization
圖(a)為優(yōu)化前目標(biāo)車輛行駛軌跡圖,圖(b)為優(yōu)化后目標(biāo)車輛行駛軌跡圖,其他圖同理。從圖(a)、(b)、(c)、(d)可以看出,當(dāng)紅燈時刻目標(biāo)車輛駛?cè)虢徊婵谏嫌蔚能囁僖龑?dǎo)區(qū)且前方車輛排隊長度為30 m、60 m時,目標(biāo)車輛會受交叉口智能設(shè)施的控制進行生態(tài)駕駛,通過勻速或者適當(dāng)加減速運動順利駛過交叉口上游區(qū)域。在目標(biāo)車輛初始速度不同的情況下,圖(d)中目標(biāo)車輛行駛軌跡在交叉口上游車速引導(dǎo)區(qū)更加集中,目標(biāo)車輛沒有因排隊車輛干擾在行駛途中出現(xiàn)減速情況,車輛速度波動集中在交叉口下游車速恢復(fù)區(qū)。圖(e)中目標(biāo)車輛會在中途停車等待排隊車輛的消散,最后跟隨排隊車輛駛離交叉口,而圖(f)中目標(biāo)車輛與前方排隊車隊尾車在行駛過程中未受到排隊車輛的干擾,兩車的車間距始終大于最小安全車距,目標(biāo)車輛在速度引導(dǎo)過程中未出現(xiàn)停車現(xiàn)象,行駛軌跡更加平順。在圖(h)中,排隊車輛雖然在第一個綠燈時間清空,但剩余的綠燈時間無法使得目標(biāo)車輛通行,目標(biāo)車輛將在下一個綠燈時間通過,相較于優(yōu)化前,優(yōu)化后的目標(biāo)車輛停車次數(shù)從2 次減少到0 次,行駛軌跡未受到排隊車輛的影響。從圖(j)中可以看出,當(dāng)排隊車輛在第一個綠燈時間無法完全消散時,目標(biāo)車輛不論選擇勻速還是加減速的駕駛方式都會在交叉口前停車等待,直至下一個綠燈時間放行,此時目標(biāo)車輛可根據(jù)號交叉口智能設(shè)施的引導(dǎo)提前緩慢減速,盡可能地減少停車怠速時間;當(dāng)二次排隊車輛開始消散時,目標(biāo)車輛根據(jù)交叉口智能設(shè)施的引導(dǎo)進行緩慢加速,直至目標(biāo)車輛恢復(fù)到初始車速;當(dāng)目標(biāo)車輛初始速度為40 km/h 時,其行駛軌跡與其余軌跡差別較大,這是由于目標(biāo)車輛首先減速到道路最低限速行駛,如果目標(biāo)車輛保持道路最低限速行駛將與排隊車輛發(fā)生交通沖突,為了保證車輛在運動過程中的安全性,目標(biāo)車輛會跟馳前方車隊行駛。優(yōu)化后目標(biāo)車輛停車次數(shù)從2 次減少到0次,停車怠速時間更短。因此生態(tài)駕駛策略可以減少目標(biāo)車輛由于缺乏前方交叉口環(huán)境信息而造成的急加速、急減速、排隊停車等情況的發(fā)生。
不同車輛排隊長度下,目標(biāo)車輛優(yōu)化前后燃油消耗與通過時間如圖6 所示。圖中橫坐標(biāo)為交叉口上游車輛排隊長度,左側(cè)縱坐標(biāo)為目標(biāo)車輛平均油耗,右側(cè)縱坐標(biāo)為目標(biāo)車輛通過交叉口停止線時間。從圖6可以看出,不論排隊長度距離的變化,目標(biāo)車輛生態(tài)駕駛的平均油耗均低于自由駕駛。當(dāng)車輛排隊長度為30 m 與60 m 時,目標(biāo)車輛生態(tài)駕駛的平均油耗略高于90 m時的生態(tài)駕駛平均油耗。這是因為當(dāng)交叉口上游排隊車輛較少時,目標(biāo)車輛需要加速通過交叉口,因此目標(biāo)車輛的油耗略高。目標(biāo)車輛如果采用自由駕駛,可能因模糊判斷而進行頻繁的加速和減速,導(dǎo)致燃油消耗增大。當(dāng)排隊車輛在第一個綠燈時間無法完全消散時,目標(biāo)車輛進行生態(tài)駕駛與自由駕駛的平均油耗分別為0.079 17 g/m 和0.087 96 g/m,燃油消耗降低了9.98%。當(dāng)出現(xiàn)車輛二次排隊時,目標(biāo)車輛進行生態(tài)駕駛與自由駕駛的平均油耗分別為0.107 20 g/m 和0.126 87 g/m,燃油消耗降低了15.5%。當(dāng)車輛排隊長度為60 m、90 m、105 m 與120 m 時,目標(biāo)車輛進行生態(tài)駕駛通過停止線時間與自由駕駛大致相同,但車輛排隊長度為30 m時,目標(biāo)車輛初速度為30 km/h 通過停止線時間出現(xiàn)延后,這是因為目標(biāo)車輛以30 km/h 初速度可以保持勻速行駛通過交叉口,使得通過停止線時間延后,但避免了不必要的加速行為。綜上,該生態(tài)駕駛策略可以在保證行車效率的同時提高車輛燃油經(jīng)濟性。

圖6 優(yōu)化前后目標(biāo)車輛燃油消耗與通過停止線時間對比Fig.6 Comparison of target vehicle fuel consumption and time to pass stop line before and after optimization
對目標(biāo)車輛運動軌跡的排放情況進行統(tǒng)計分析,統(tǒng)計結(jié)果如表3 所示。對比統(tǒng)計數(shù)據(jù)可知,不論前方車輛是否清空,采用生態(tài)駕駛的目標(biāo)車輛污染物排放量均有所降低。當(dāng)前方排隊車輛清空,生態(tài)駕駛的CO2、CO、HC、NOx平均排放量分別比自由駕駛降低了11.69%、20.14%、1.66% 和29.09%;當(dāng)交叉口處出現(xiàn)車輛二次排隊,生態(tài)駕駛的CO2、CO、HC、NOx平均排放量分別比自由駕駛降低了15.42%、27.51%、2.24%和36.15%。由此看出,該生態(tài)駕駛策略可以有效減少污染物排放。

表3 目標(biāo)車輛的污染物排放情況Tab.3 Pollutant emissions from target vehicles
4 結(jié)論
本文考慮駕駛員反應(yīng)時間對駕駛行為的影響對IDM 跟馳模型進行了改進,提出了一種考慮二次排隊的智能網(wǎng)聯(lián)車生態(tài)駕駛策略。選用三種目標(biāo)初始速度與五種初始排隊長度進行仿真驗證,得到以下結(jié)論:
(1)與自由駕駛相比,該生態(tài)駕駛策略可以優(yōu)化駕駛軌跡,減少車輛在交叉口處的停車次數(shù),避免車輛在行駛過程中急加減速的產(chǎn)生。
(2)隨著交叉口排隊長度的增加,生態(tài)駕駛策略的優(yōu)化效果愈加明顯。當(dāng)前方車輛二次排隊時,采用生態(tài)駕駛策略的目標(biāo)車輛總油耗降低了15.50%。
(3)當(dāng)交叉口處出現(xiàn)車輛二次排隊,生態(tài)駕駛比自由駕駛運動軌跡的CO2、CO、HC、NOx平均排放量分別降低了15.42%、27.51%、2.24%、36.15%。
(4)在后續(xù)工作中,可以進一步探究不同滲透率下智能網(wǎng)聯(lián)車的生態(tài)駕駛策略。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
保健醫(yī)苑(2021年7期)2021-08-13 08:48:02
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
學(xué)生天地(2020年36期)2020-06-09 03:12:30
小學(xué)科學(xué)(學(xué)生版)(2020年5期)2020-05-25 07:11:32
小學(xué)科學(xué)(學(xué)生版)(2020年4期)2020-05-21 07:30:46
小學(xué)科學(xué)(學(xué)生版)(2020年3期)2020-03-25 13:31:22