基于仿生設計的四足類壁虎機器人*
2023-12-13 11:25:58帖軒正李秋宇
機電工程技術 2023年11期
關鍵詞:結構
帖軒正,李秋宇,嚴 潔,楊 瀟,周 鵬,駱 佼※
(1.上海工程技術大學藝術設計學院,上海 201600;2.上海工程技術大學機械與汽車工程學院,上海 201620)
0 引言
隨著時代和技術的進步,四足機器人的實用價值逐漸凸顯。與輪式、蠕動式等機器人相比,四足機器人具有機體結構穩定、運動靈活、受地形限制少等優點,在航空航天、預警偵察、補給運輸等領域具有廣泛的應用前景[1]。四足機器人因獨特的結構設計和復雜的驅動控制方式,成為研究熱點之一。但大多四足機器人仍需電控與復雜結構之間的配合才得以完成仿真的效果。仿生機器人就是模仿自然界中生物的精巧結構、運動原理和行為方式等的機器人系統。科學家們向生物學習,創造出了眾多高性能的仿生機器人,如機器魚、機器蛇、機器蠅,以及各種仿生材料[2]。仿真機器人在移動能力上具有靈活性和可變性的特點,故其可適應各種復雜地形及多種場景的探索工作,但是單純的復雜大型機器人無法適應復雜場景下的各項探索工作。而部分仿生機器人具有體積小,質量輕的特點,在仿生機器人研巧熱潮下,尋找到一種適用于輔助人類生活并適用于各類地形的機器人,并且能夠擔當起相應野外研巧和探究任務,成為了關注點。
足式機器人能夠在復雜的地形上運行,其根本原因是仿生結構的靈活性、自由性,四足機器人的構造可按動物的骨骼構造設計[3]。 自然界作為人類尋求靈感的智庫,一直以來為人類提供了大量的生物學啟示,受到在生物世界中所觀察到的足式動物運動優勢的啟發,科學家和工程師正在將生物智能的原理應用于足式機器人的設計[4]。國內外仿生機器人研究的兩個主要方向是運動機理和行為方式[5]。國內對仿壁虎機器人技術的研究主要針對爬壁機器人展開,這方面影響比較大的主要有哈爾濱工業大學與北京航空航天大學,中國科學院沈陽自動化所機器人開放實驗室[6]與上海大學也有這方面的研究,南京航空航天大學也已經展開了生物壁虎機器人技術研究并已取得初步成果[7]。但是目前,四足仿生機器人在狹窄空間等復雜地形的應用仍不多,且其機械設計復雜,缺少一些結構較為簡單的仿生設計。因而,本文聚焦于一種結構簡單,易操控,且能完成對壁虎爬行運動仿真的四足機器人;通過實驗測試,證明該基于仿生設計的四足類壁虎機器人機械部分及驅動部分的設計是合理可行的。
1 四足類壁虎機器人結構
1.1 總體設計
1.1.1 仿生學及壁虎的生理結構
研究壁虎的生理結構及外形特點發現,從機械運動的角度看,骨骼組成了運動系統的構件,是支撐其運動的基礎,骨骼間的關節是壁虎運動系統的運動副[8]。壁虎的脊椎骨骼及椎節間有相對轉動較小的特征,構成其S 形的運動基礎。四肢的構造對整體運動形態的影響較大,通過研究其運動特征發現,股骨相對身體的轉動為-80°~80°,脛骨相對股骨的轉動為60°~150°,如圖1 所示。因而,本文以壁虎體積小且運動靈活為出發點,對壁虎爬行時四肢的運動及各關節處配合進行數據分析,開展四足類壁虎機器人仿生設計。
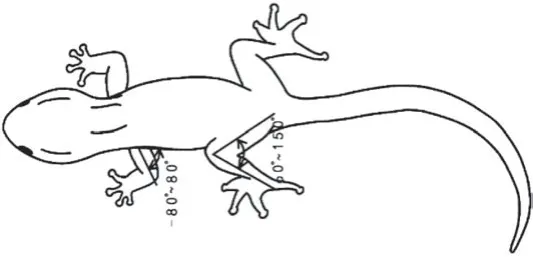
圖1 壁虎的生理結構
1.1.2 整體結構及模塊
根據壁虎的以上運動特征,將兩塊不規則亞克力板及舵機組合作為壁虎的軀體;以板塊構成的雙連桿結構作為壁虎的運動機構;以舵機、步進電機、傳感器、攝像頭作為其功能模塊。機械結構規律性運動與舵機電機協調配合以實現各功能。近年來,無線網絡因高速數據傳輸特性和連接穩定性的提高,在移動機器人領域也得到了應用[9-11]。
1.2 類壁虎機器人結構設計
1.2.1 機械結構
該機器人如圖2 所示,包含活動連接的上軀體和下軀體,上軀體和下軀體的左右兩側均配置有雙連桿腿組件,在上軀體和下軀體內均設有2 個分別用于驅動兩側雙連桿腿組件的舵機,在每個雙連桿腿組件的末端均設有吸盤以及用于驅動吸盤上下運動的步進電機;在上軀體或下軀體上安裝有驅動器,所述驅動器與各個舵機和各個步進電機相連。
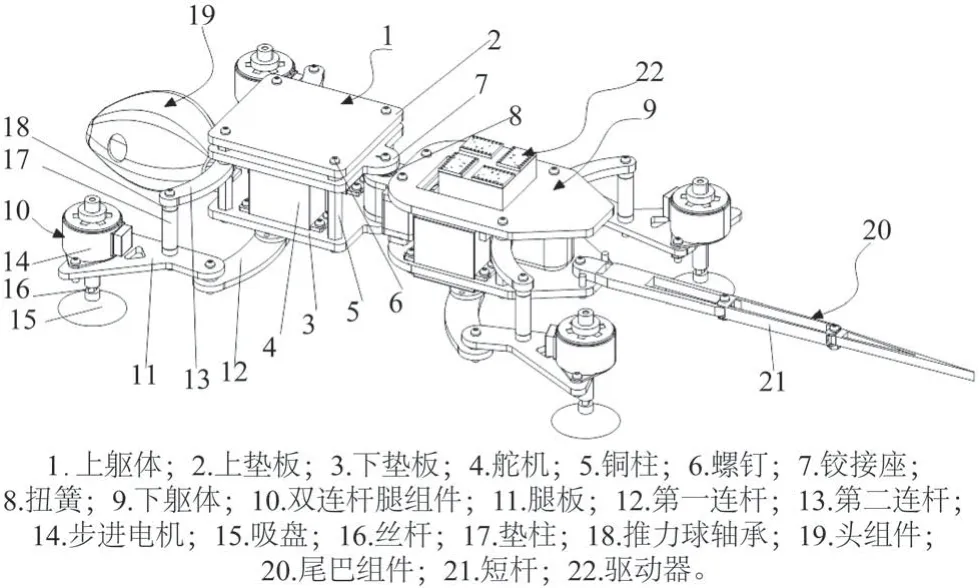
圖2 類壁虎機器人結構
上軀體和下軀體均設有上墊板和下墊板,上墊板和下墊板之間通過若干銅柱和螺釘固定連接,舵機固定安裝在上墊板和下墊板之間;上軀體的上下墊板后端以及下軀體的上下墊板前端均設有鉸接座,通過銷軸將上軀體、下軀體轉動連接,銷軸配置有扭簧。
各雙連桿腿組件包含有腿板、第一連桿、第二連桿,在腿板安裝有步進電機,步進電機連接有絲桿,在絲桿上安裝有吸盤,由步進電機帶動絲桿及其吸盤上下運動;第一連桿和第二連桿的一端均與腿板轉動連接,第一連桿的另一端與舵機相連,第二連桿的另一端與上墊板或下墊板相連。舵機的輸出軸向下穿過下墊板并與第二連桿相連;在腿板上豎直安裝有墊柱,第二連桿的一端與墊柱頂端轉動連接,墊柱的上下兩端均設有推力球軸承。
上軀體前端活動連接有頭組件,且在下軀體后端活動連接有尾巴組件,尾巴組件由至少3 節首尾鏈接連接的短桿組成。上軀體前端活動連接有頭組件,且在下軀體后端活動連接有尾巴組件,尾巴組件由至少3 節首尾鏈接連接的短桿組成。上墊板或下墊板上設有用于限制頭組件、尾巴組件以及下軀體擺動幅度的限位機構。
1.2.2 電控模塊設計及分析
電控部分整體由舵機、步進電機、溫度傳感器、蜂鳴器、CNC 電機擴展版等組成,以實現在工廠巡邏防火,報警等實際功能。類壁虎機器人每個腿部的電控系統由1個舵機和1個步進電機組成。腿部雙連桿機構通過舵機帶動改變前后運動方向,步進電機控制腳掌上下運動,同時與搖桿結構配合使其協調運行,以便更快速地完成1個運動周期。
根據以上分析進行如下設計:舵機的轉動角度通過占空比為5%的PWM(脈沖寬度調制)信號Timer 捕獲,較寄存器為190;再使用CNC 電機擴展板配合A4988 驅動步進電機驅動壁虎機器人運動。A4988 驅動步進電機是一款帶轉換器和過流保護的DMOS 微步驅動器,該產品輸出驅動性能可達(35±2)V,通過DIR腳控制方向。
2 四足類壁虎機器人運動學分析
2.1 運動學分析計算
2.1.1 步態分析
傳統四足機器人大多采用剛性軀干,而自然界的四足動物普遍具有可自主運動的軀干,其在奔跑、跳躍、轉彎、攀爬等一系列行為中都伴隨著軀干的運動。動物的軀干運動形式主要包含扭動運動、拱仰運動和扭拱混合運動[12]。通過分析壁虎身體結構與運動規律[13]和觀察壁虎爬行方式的基礎上,設計出針對仿壁虎機器人的爬行步態。通過分析生物界壁虎的運動,設計出S 形的運動模型。圖3 所示為四足類壁虎機器人一個周期的基本步態示意。
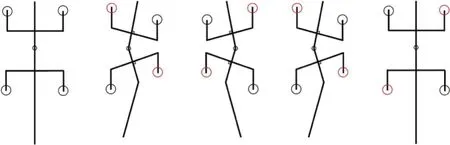
圖3 基本步態示意
2.1.2 運動學計算
運動步態是足式機器人的走步形式,是足式機器人各條腿協調運動的一種規律,也就是每條腿的抬、放腿順序,它是分析足式運動構件的重要參數[14]。對角線2只腳由步進電機驅動抬起24 mm;3個由墊柱和推力球軸承連接的碳板組成雙搖桿結構,在舵機帶動下兩腿同時向前移動(通過計算得兩條腿足以支撐整個身體)。身體前后兩部分在產生角度(分析壁虎真實步態約為110°),因此設計中將腰部非固定連接,同時安裝扭簧,以達到此目的。
經測量得: 腿部單次移動水平位移d=25 mm;腿部一次移動時間t=0.2 s;1 個抬腿(腿部上下移動)周期為T=5 s;預估前進速度V=d/(t+T/2)=0.93 cm/s。
2.2 靜力學分析及輸入端設計
為保證四足類壁虎機器人能在地面平穩爬行且實現其步態的仿真,需要在設計計算時,采取碳纖維板材質作為腿部主要材質,通過雙連桿機構及電控部分的配合順序,進行計算扭力、扭矩、轉速等,針對其要求及計算結果對電控部分選型。整體控制及造型由舵機、步進電機和碳纖維板組成,舵機使用MG996R 舵機,扭矩為9 kg/cm(4.8 V)、11 kg/cm(6 V),力臂為61 mm,輸出為14.459 N(4.8 V)、17.672 N(6 V),速度為0.19 s/60°(4.8 V)、0.18 s/60°(6 V),工作電壓為4.8~6 V。步進電機采用K25步進電機,最大推力為20 N,最大行程為24 mm,一個運動周期為2.5 s。外殼和基本組織采用T300碳纖維板,拉伸模量為230 GPa,抗拉壓強度為3 500 MPa。
3 仿真分析
3.1 計算機輔助分析
在進行四足類壁虎仿生機器人結構設計時利用了三維設計軟件(SolidWorks),在研究新的機械結構時,可借助其進行概念化設計,基于機械設計原理和實際經驗,通過這些軟件建立三維虛擬模型并進行相應的仿真分析,可以使制造產品所用的費用大大降低,提高產品的性能,縮短開發時間[15]。圖4 所示為輔助設計流程。
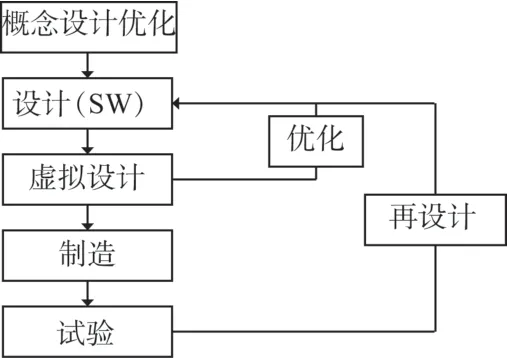
圖4 輔助設計流程
3.2 建立簡化的三維模型
首先利用SolidWorks 軟件對四足類壁虎機器人的整體進行三維模型設計,在仿真分析之前確定需要得到的數據,包括步態運動仿真捕捉圖、關節之間的角度、1個周期內的三維運動。受計算性能影響,在仿真分析時將對運動形態和控制影響不大的結構進行。簡化后三維模型如圖5 所示。通過分析計算測得在步進電機2.5 s 的運動周期以及舵機6 V 電壓下,機器人的腿部單次水平位移為25 mm, 1 個抬腿(腿部上下移)的周期為5 s。整體以交叉步態為前進方式,前進速度約為0.93 cm/s。
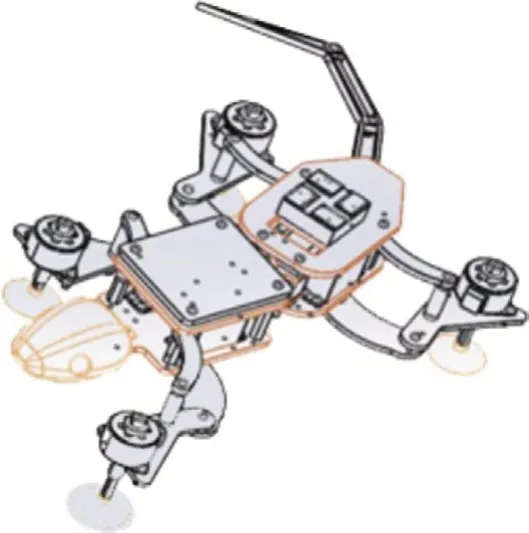
圖5 簡化三維模型
4 結束語
本文設計的四足類壁虎機器人以較為簡單的機械結構和電控系統模擬了自然界中壁虎的運動形態,達到了對壁虎的仿生目的。設計從壁虎步態分析入手,確立了基于連桿的機械結構形式,通過模塊化設計思想和仿生學原理仿真計算。其中,由板塊、連桿機構結合而成的機械骨架和電控部分協調一致,實現了對角步態和S 形運動仿真。本設計主要特點包括以下3點。
(1)腿部結構。以簡單的連桿結構相互配合及其關節連接處的推力球軸承,實現對壁虎爬行步態的仿真,同時構成腿部的結構。該機器人以彎曲的碳板為骨骼,更形似壁虎又比直板更堅固。
(2)多種限位方式。腰部的扭簧、尾部的物理限位以及腿部的連桿結構,使其運動靈活,更貼近于壁虎真正的爬行狀態。限位的多處使用保證了在運動過程中,機器人各部分不會對整體運動造成影響。
(3)功能方面。對壁虎的形態步態進行分析和規劃,使其最大程度地實現仿生的特點。在眼睛位置開孔,安置攝像頭,以實現監測功能。
本文設計成品體積小,擬態隱匿性好,可用于工廠和野外等,應用場合廣泛;用材少,成本低,制造和使用成本低。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50