城軌信號系統接觸網禁停區防護技術研究
2023-12-18 11:26:34沈家明
鐵道通信信號 2023年12期
沈家明
傳統接觸網禁停區一般是在線路上安裝停車指示牌或設立標識,通過司機辨認標識人工防護[1]。列車非預期迫停在禁停區時,司機需要降雙弓后,手動逐個升單弓并駕駛列車駛出禁停區。由于目前城軌線路大多采用自動運行模式(ATO)或全自動運行模式(FAO)運營[2-3],因此當發生列車迫停在禁停區時,需要司機或運營人員先將列車轉換到手動駕駛模式,再操作升降弓駕駛列車駛出禁停區。復雜的操作會使得列車長時間停留在禁停區內,容易發生受電弓與接觸網間拉弧放電,甚至燒斷接觸線導致斷電的故障,造成大量乘客滯留需要疏散[4],運營中斷可長達數小時。為防止此類重大運營故障的發生,若由供電專業進行接觸網改造,工程規模巨大且成本過高,因此地鐵運營方提出由信號專業基于列車自動防護技術對接觸網禁停區進行防護。本文闡述接觸網禁停區的設置原則,深入研究信號系統在不同場景下的接觸網禁停區防護方案。
1 接觸網禁停區設置原則
一個典型的接觸網禁停區示例見圖1。根據供電專業提供的絕緣錨段關節相關信息,定義從A點到B點為絕緣錨段關節區域。信號系統在設置接觸網禁停區時,需考慮列車前弓和后弓均不在絕緣錨段關節區域內且包含一定的設計余量。以前弓為例,前弓在A 點進入錨段關節區域時,計算前弓到車鉤距離再加3 m 為禁停點C。列車繼續從A 點往B點行駛,前弓在B點離開錨段關節區域時,計算前弓到車鉤距離再加3 m 為禁停點D。C 點到D點為前弓的禁停區域。以同樣方法計算出后弓的禁停區域為E 點到F 點。結合目前運營規程,列車仍需在接觸網停車牌T 點前停車,最終確定信號系統數據庫中該處接觸網禁停區范圍為T 點到F 點。信號系統對數據庫中設定的接觸網禁停區,通過移動授權管理,提供列車自動防護功能。
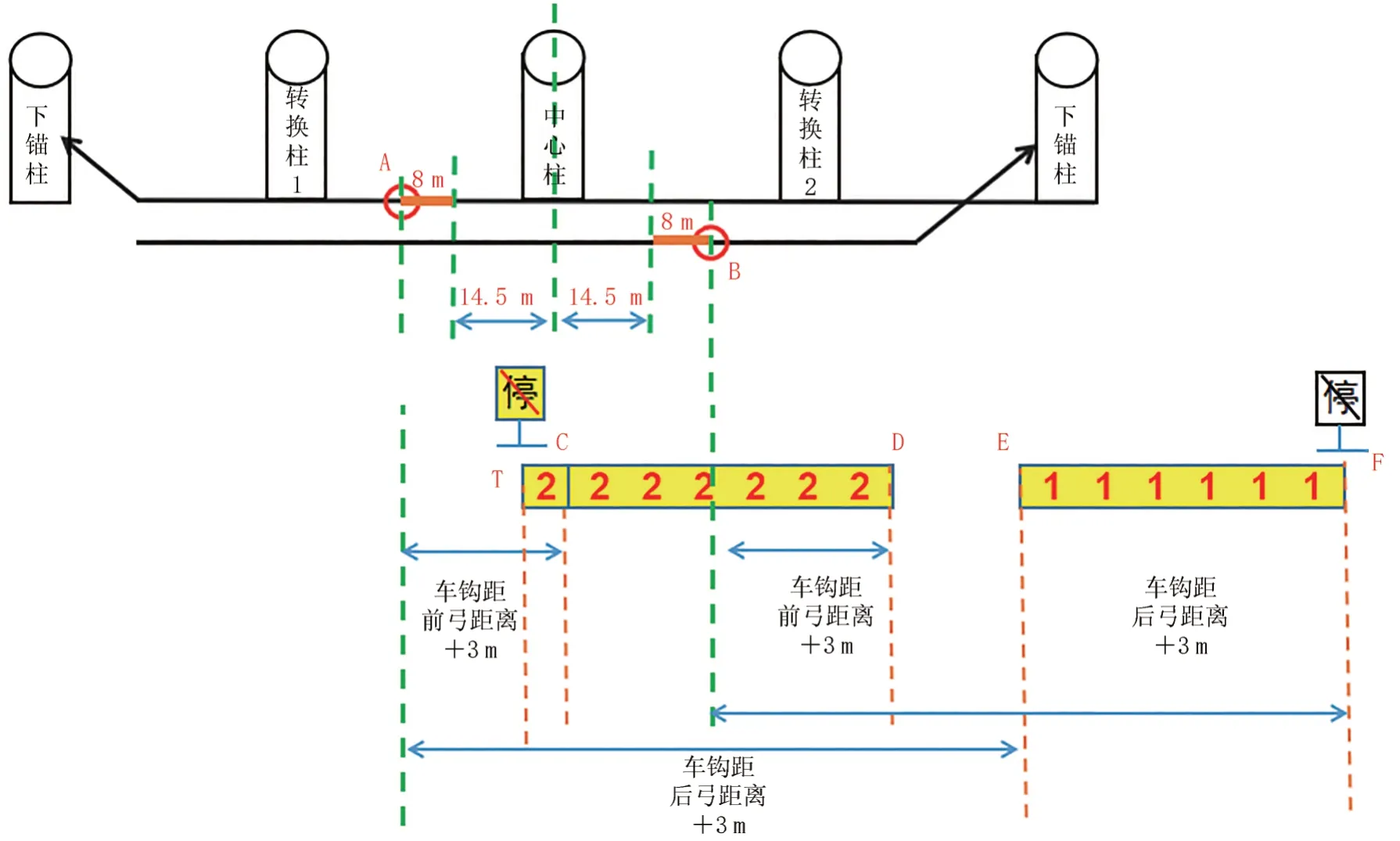
圖1 接觸網禁停區示例
2 不同區域接觸網禁停區防護
2.1 區間接觸網禁停區防護
列車在區間運行時,車載控制器(VOBC)將判斷前方移動授權范圍。若移動授權超過接觸網禁停區加上車鉤到后弓的距離(見圖2),即VOBC判斷可以不停車經過接觸網禁停區,則控制2 車繼續運行。如果上述距離不滿足(見圖3),列車將停在接觸網禁停區邊界處。VOBC 計算2 車的停車位置時,將考慮定位誤差,并計算出最不利情況下的停車距離[5-6],在該距離前觸發制動命令,保證列車可以在接觸網禁停區外的停車點停車。實際列車停車時,車頭可能停在距接觸網禁停區邊界更遠的位置。
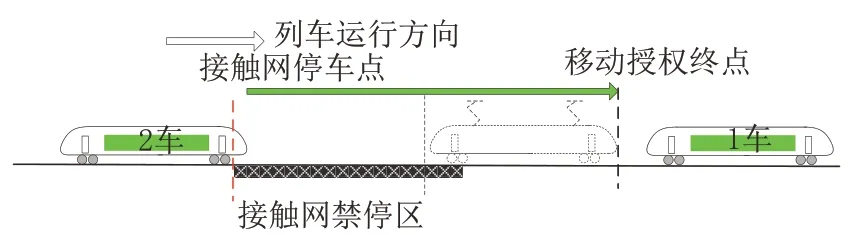
圖2 列車越過接觸網禁停區
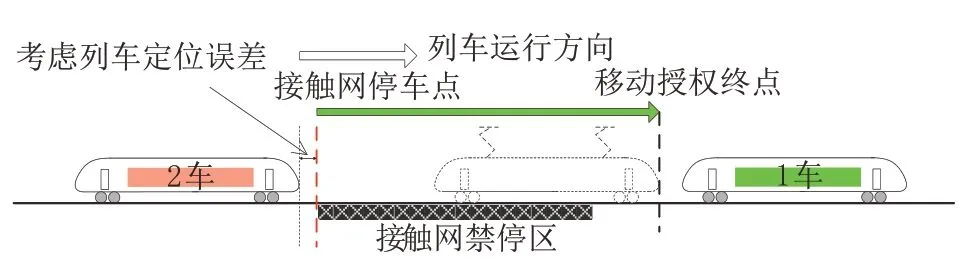
圖3 列車在接觸網禁停區前停車
2.2 站臺接觸網禁停區防護
2.2.1接觸網停車點離站臺較近
當接觸網停車點離站臺較近且接觸網禁停區較短,而站臺區域有車時,見圖4(a),2 車VOBC在計算移動授權時將考慮前車的回退防護距離、后溜防護距離和授權余量等因素[7],導致移動授權終點在接觸網停車點外方,列車將在距離接觸網禁停區外更遠的位置停車。
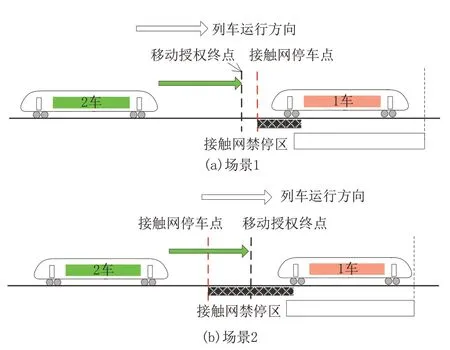
圖4 站臺停車
2.2.2接觸網停車點離站臺較遠
當接觸網停車點離站臺較遠且接觸網禁停區較長,而站臺區域有車且移動授權終點在接觸網停車點內方時,見圖4(b),2 車VOBC 根據移動授權停車點位置,判斷在移動授權內有接觸網停車點,將以接觸網停車點位置作為當前停車依據。
當站臺區域沒有列車占用,列車進站還未進入接觸網禁停區時,若此時站臺門故障或緊急停車按鈕激活[8],將導致站臺軌道關閉,移動授權回撤。VOBC 根據回撤后的移動授權計算停車點,當判斷接觸網停車點更接近列車位置,列車將在接觸網停車點位置停車。
3 不同列車模式下的接觸網禁停區防護
3.1 列車自動運行模式
當列車在自動運行模式(Automatic Train Operation, ATO)下移動授權越過接觸網禁停區時,VOBC 需要根據移動授權計算停車點。如圖5 所示,如果計算的停車點不能使列車完全通過接觸網禁停區,則VOBC 將停車點設置在接觸網禁停區外方,列車將不會進入接觸網禁停區。列車自動監控系統 (Automatic Train Supervision,ATS)將顯示對應的接觸網禁停區域來提醒調度人員。司機顯示單元(Train Operator Display,TOD)將彈出信息提示[9],告知司機當前列車停車點為接觸網停車點。
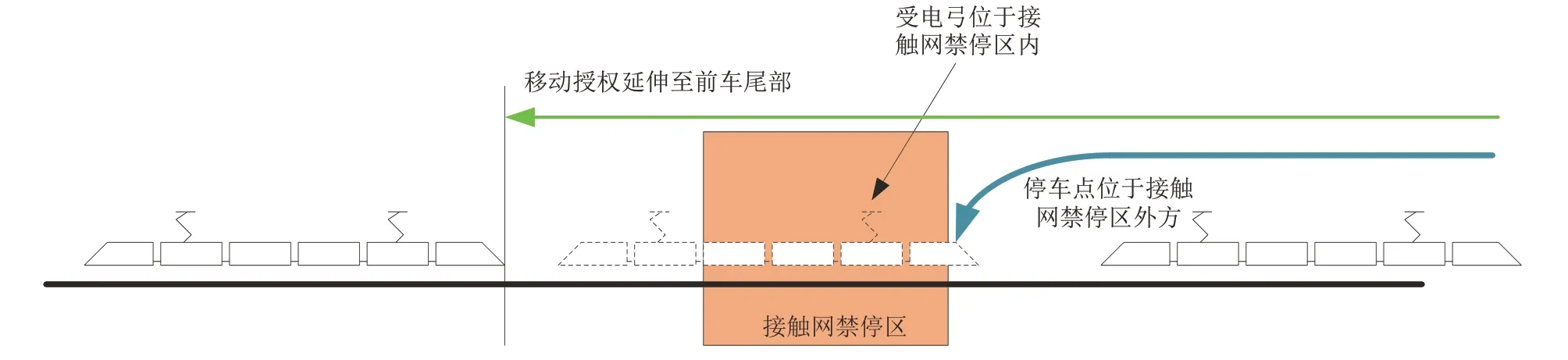
圖5 ATO模式列車在禁停區外停車示意
移動授權延伸可以滿足列車后弓完全越過禁停區或列車已經進入禁停區域時,VOBC 將不再考慮接觸網停車點,列車按正常行駛速度越過禁停區,TOD將不顯示接觸網停車點信息。
ATO 模式下系統判斷列車能夠越過接觸網禁停區并已經動車時,如前方發生緊急停車按鈕激活、站臺門非安全狀態、調度人工關閉軌道、道岔失表故障等導致移動授權回撤的場景[9],此時已經啟動的列車將會施加緊急制動,可能會停留在接觸網禁停區域內,從而導致預期的防護功能失效。在這種情況下,司機必須與調度員取得聯系,獲得調度員授權后以手動模式駕駛列車離開禁停區域[10]。
3.2 列車自動防護手動駕駛模式
在列車自動防護手動駕駛模式(Automatic Train Protection Manual,ATPM)下,VOBC 仍會根據接觸網禁停區數據并結合移動授權終點,實時計算列車的停車點。列車接近接觸網停車點時,若VOBC 判斷列車受電弓無法完全出清接觸網禁停區,需要在接觸網禁停區外方停車時,將通過ATS 線路概覽顯示和TOD 彈出信息提示調度員和司機。同時TOD 將顯示車頭到接觸網停車點的距離,司機需要按照TOD 顯示的接觸網停車點距離手動控制列車在接觸網禁停區外停車。
ATPM 模式下列車在接觸網停車點外方停車后,TOD 上目標距離顯示為0 m,但顯示保持最大速度[11],司機仍然可以按ATPM 模式駕駛列車進入接觸網禁停區。該類操作司機必須和調度員確認并獲得調度員授權后再進行動車。
4 接觸網禁停區防護的影響分析
4.1 信號系統降級后的禁停區防護方式
在信號系統故障或者降級模式下,禁停區設置將影響非通信列車的運行效率。CBTC 模式降級后,通信列車降級成非受控列車,并以點式人工模式[12]或受限的人工模式運行。非受控列車只能遵循固定閉塞的原則動車,司機將信號機顯示作為動車憑證。由于VOBC 無法獲取移動授權信息,只能通過軌旁設備獲取基于信號機防護的區段授權。列車無法判斷接觸網禁停區和當前授權停車點的準確位置。因此信號系統降級模式下司機仍按辨識接觸網禁停區標識的方式進行人工防護。
4.2 高密度運營間隔的影響評估
對于接觸網停車點離站臺較近且禁停區域較短的情況,后車接近時速度較低,需要前車車尾包絡出清接觸網禁停區加后車車鉤到后弓的距離,后車才能越過禁停區。兩車緊密追蹤時,相比于無禁停區設置的情況,前車出清站臺后,后車需要運行更長的距離才能到站,這對于高密度運營線路將會增加運營間隔。ATPM 模式下由于采用手動方式駕駛列車,司機可能將列車停在更遠的位置,相比ATO模式列車,對運營間隔的影響更大。
根據實際接觸網禁停區的長度及禁停區距車站的距離等數據計算發車間隔時間[13]。禁停區的設置將增加區間追蹤間隔5~10 s 左右。經過評估,該數量級的區間追蹤間隔增加可通過ATS 的運營調整策略進行修正,因此禁停區設置對區間運行的影響基本可忽略不計。而正常運營場景下決定交路能力的瓶頸是折返、分叉匯合、折返站追蹤間隔等。根據新的發車間隔模型在線路行車能力仿真系統上進行上海地鐵6 號線、8 號線和9 號線運營模擬,結果顯示折返間隔符合交路要求,對折返站間隔沒有影響。折返站間隔影響分析見表1。
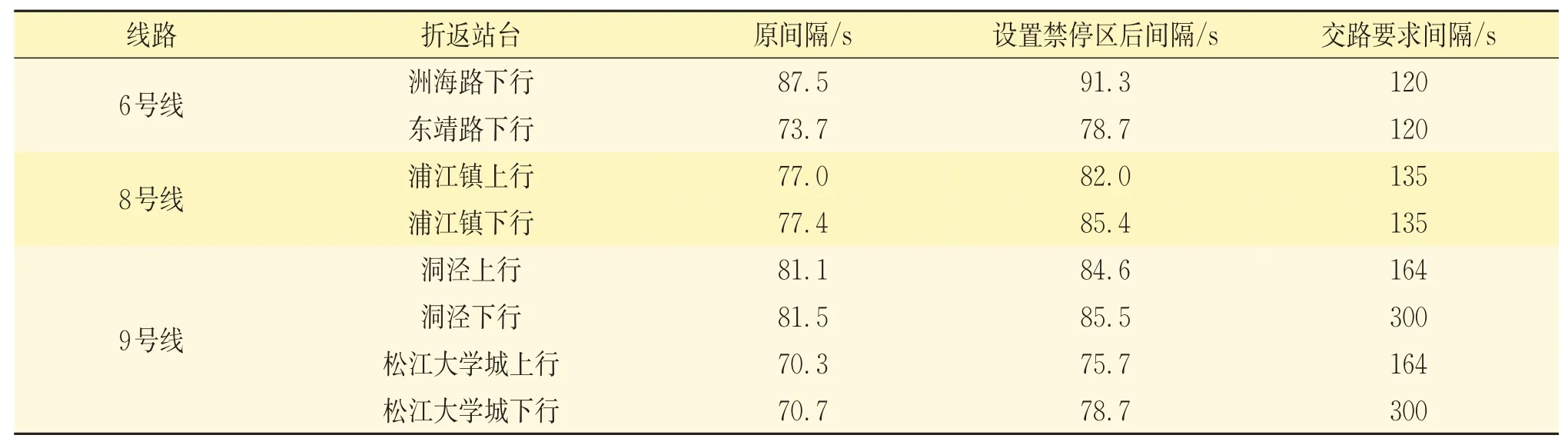
表1 上海地鐵部分線路折返站間隔影響分析
5 結束語
本文闡述了城軌交通接觸網禁停區設置原則,結合運營場景和運行模式提出多種接觸網禁停區防護方案,并分析了接觸網禁停區設置對既有系統的影響。目前接觸網禁停區防護功能已在上海地鐵6號、8號、9號線等線路中應用,且運行穩定。從工程項目角度考慮,通過信號專業實現對接觸網禁停區的防護,為跨專業的供電系統提供了一個可靠且改造成本相對較低的解決方案。但需要注意的是,信號系統僅能盡量減小列車在禁停區停車的概率,而不能完全避免該類場景發生。要想徹底解決接觸網禁停區問題,還需要供電和車輛等專業共同對接觸網絕緣錨段關節設置[14]、受電弓、接觸線材質等要素進行深入研究。