雙柔性梁振動激光視覺測量與自適應協同控制
2023-12-19 13:14:04邱志成胡駿飛
光學精密工程 2023年22期
邱志成, 胡駿飛, 李 旻
(華南理工大學 機械與汽車工程學院,廣東 廣州 510641)
1 引 言
柔性結構在航天器中得到了應用,如空間機械手、太陽帆部件等[1]。由于重量輕、阻尼小,常常引起長時間的振動[2]。尤其是對于多柔性體耦合的系統,如太陽翼伸展裝置[3]、航天器太陽能電池陣等[4],具有復雜的結構、強耦合動力學和非線性因素。因此,研究多柔性體系統的振動控制具有重要意義。
振動控制通常基于振動信號的反饋控制,精準測量振動信號直接決定了控制效果。振動測量的方法可分為接觸式測量和非接觸式測量。接觸式測量需要傳感器接觸柔性結構,包括壓電傳感器,加速度傳感器等。這類傳感器會對柔性結構增加額外負載,改變柔性結構的物理特性。非接觸式傳感器不外加額外負載,并且測量區間更大。視覺傳感器、激光位移傳感器等都屬于非接觸式傳感器。Sun 等人[5]提出了一種基于視覺和深度學習的三維結構位移測量方法,具有較好的識別精度。Neri 等人[6]采用低速相機測量頻率為千赫茲級別的振動。陳磊等人[7]通過立體視覺三維測量技術測量風洞實驗中飛行器的顫振數據。相比于雙目視覺振動檢測傳感器,點激光視覺傳感器無需粘貼標志點,并且受環境光影響小,抗干擾性能好。
常見的控制器包括基于模型的控制器和無模型的控制器。基于模型的控制器利用模型知識,控制器設計包含被控對象的數學模型。Long等人[8]提出了一種基于模型的滑模和強化學習控制器。Liu 等人[9]采用哈密頓原理建立模型,設計了一種柔性板自適應控制策略。劉寶等人[10]基于生物生長激素的調節原理,提出了一種協同控制器,并采用優化方法設計控制器參數。無模型控制基于與期望狀態的偏差進行控制。Du 等人[11]采用無模型預測控制方法進行柔性臂振動控制。Boscariol 等人[12]提出了一種無模型的非線性柔性連桿振動控制器。馬天兵等人[13]采用機器視覺方法測量機械臂振動,采用改進PID 進行振動抑制。王立新等人[14]提出一種直接自適應模糊控制器,構建了控制的模糊邏輯系統。
本文對雙柔性耦合梁結構的振動測量與控制進行了研究。提出了一種點激光視覺振動測量方法,采用直接自適應模糊協同控制方法進行柔性梁振動主動控制,進行了雙柔性耦合梁振動檢測與控制實驗研究,驗證了點激光視覺測量方法和振動控制算法的有效性。
2 實驗系統結構與建模
2.1 雙柔性梁耦合系統介紹
移動雙柔性梁耦合系統的實驗臺如圖1 所示。系統由兩根柔性壓電梁和三根線性彈簧組成,分別固定在柔性梁或剛體的兩端,形成一個剛柔耦合的運動系統,它們一起安裝在剛性的滑動臺上。剛性滑動臺由一個帶滾珠絲杠的伺服電機驅動,絲杠的型號為KR55,其導程和行程分別為20 mm 和980 mm,定位精度為±0.01 mm,編碼器讀取電機的角位移和角速度。兩個激光位移傳感器被固定在距離柔性梁100 mm 的地方,用來測量柔性梁測量點的振動位移,激光位移傳感器的測量精度為30 μm。柔性梁1 的振動信號由激光位移傳感器獲取,柔性梁2 的振動信息由點激光視覺振動檢測系統測量。點激光視覺檢測系統包括1 臺Basler 相機和一個點激光發射器。兩根柔性梁的末端各安裝一個質量為51.75 g 的加速度傳感器,可用來測量末端的加速度和模擬集中質量,在本系統中主要作末端負載使用,該研究并沒有用加速度傳感器進行振動測量。系統采用Googoltech 公司的多通道運動控制卡進行振動控制。雙通道壓電放大器用于將運動控制卡的輸出信號從-5~5 V 放大到-260~260 V 以驅動壓電執行器。
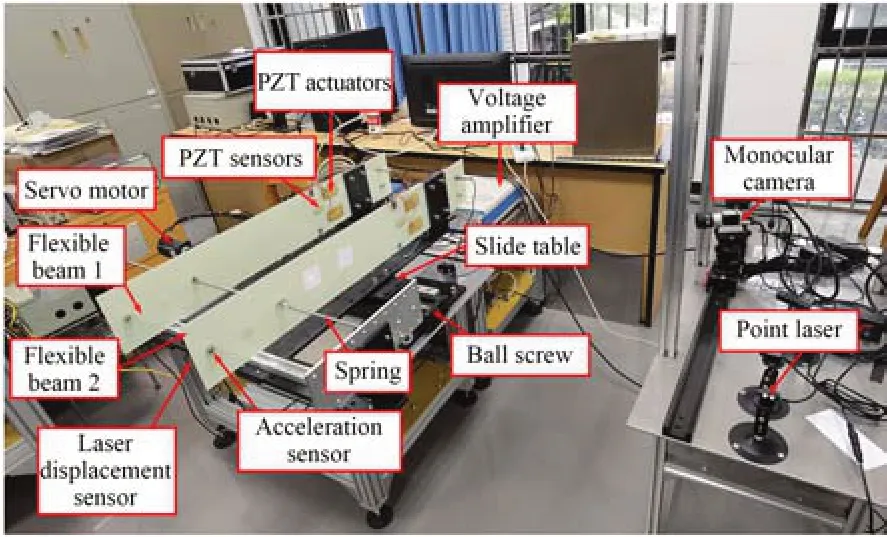
圖1 雙柔性梁耦合系統Fig.1 Double flexible beam coupling system
柔性梁的主動振動控制是通過采用粘貼在梁根部固定端表面的PZT(鋯鈦酸鉛)驅動器實現的。梁和PZT 驅動器的尺寸參數和材料參數列于表1。
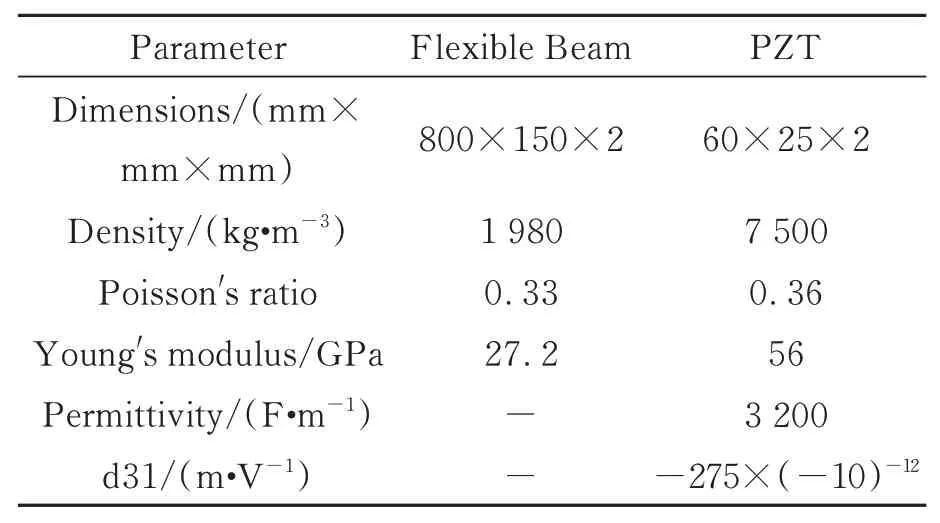
表1 梁和PZT 執行器的尺寸參數和材料參數[15]Tab.1 Dimensions and material parameters of flexible beams and PZT patches[15]
2.2 動力學建模與參數辨識
采用哈密頓原理和有限元方法進行系統動力學建模[16],得到系統狀態空間方程
采用小波辨識方法[17]和優化方法辨識獲得狀態空間方程參數為:
系統模型中飽和雙柔性耦合梁系統的前兩階振動模態,分別是雙柔性梁第一階同向振動模態和第二階反向振動模態,從辨識矩陣參數可以看出柔性梁存在耦合關系。
3 點激光視覺振動檢測
點激光視覺可以通過單目相機加點激光的方式進行柔性梁的振動測量。采用點激光視覺傳感器進行移動柔性梁的振動測試方案,對相機標定、圖像處理、振動量計算等方面進行了分析。
3.1 點激光視覺檢測系統
視覺檢測系統主要由點激光投射器,單目工業相機構成,其中單目相機有效像素為200 萬,其系統原理圖如圖2 所示。點激光投射圓形光斑至柔性梁面,相機實時拍攝激光點,通過激光方程,柔性梁面法向量與相機內外參,求解出激光點的三維位置信息,從而得到柔性梁的橫向振動信號。
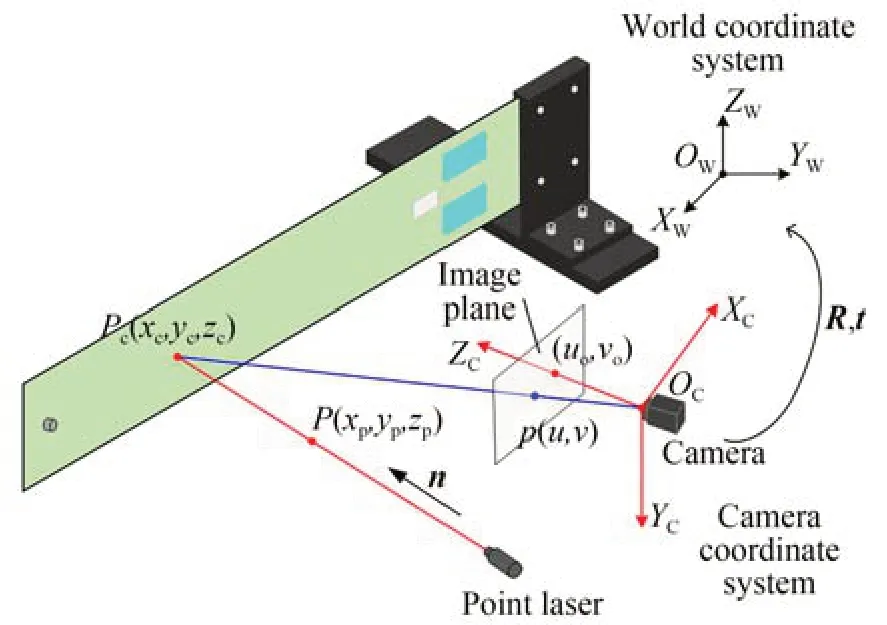
圖2 視覺測量系統原理圖Fig.2 Schematic diagram of vision measurement system
3.2 系統標定
3.2.1 相機標定
采用張正友標定法[18]進行相機參數標定。如圖3(a)所示,拍攝多張不同角度的棋盤格圖片,包括激光發射器投射點,拍攝的照片還可用于點激光標定,進行相機內外參標定。

圖3 相機標定圖片Fig.3 Camera calibration pictures
根據相機的成像理論,相機成像可以寫作如式(2)和式(3)[18]:
其中:(u,v)為相機拍攝圖像坐標系下的坐標;(xw,yw,zw) 為世界坐標系下的三維坐標;(xc,yc,zc)為相機坐標系下的三維坐標;fx,fy分別為u和v軸的焦距;(uo,vo)為光心坐標,以上為相機的內部參數,一般出廠就已經固定,矩陣A=即為相機的內參矩陣。R和t分別為旋轉矩陣和平移矩陣,組成了描述相機坐標系和世界坐標系的關系相機的外部參數,[r1r2t]即為相機的外參矩陣。
3.2.2 點激光標定
激光方程的標定包括激光線在空間的方向向量以及激光線上某一點P的三維坐標。因激光點在標定板平面上所以zw=0,有:
獲得所有拍攝圖片的激光點三維坐標后,進行直線擬合獲得激光方程。擬合目標為:
其中:di為每個激光點到擬合激光線的距離。直線上一點P的坐標為取標定板不同位置和姿態時,標定板上投射的激光點坐標的平均值。
激光線方程可以表示為:
其中:(xp,yp,zp)為激光線上一點P的坐標;(nx,ny,nz)為激光直線的方向向量;Κ為中間變量。
3.2.3 梁面法向量標定
柔性梁面的法向量標定需要采用粘貼在梁上的標定板,如圖3(b)所示。將滑臺移動至絲杠不同位置采用單目相機拍攝圖片,對標定板外參進行標定。導出標定板平面方程,獲得所有拍攝圖片的柔性梁面法向量后,求解最優梁面法向量,優化目標為:
其中,θi為第i個法向量與最終求解法向量的夾角。
3.3 圖像處理
在標定過程和振動檢測過程中都需要對拍攝圖像進行處理,從所拍攝圖像中提取有價值信息,這里主要采用OpenCV 庫對激光點進行圖像處理,如圖4 所示。

圖4 圖像處理過程Fig.4 Process of image processing
為了提高處理速度,設置ROI(Region of Interest)區域對實時采集圖像進行裁剪,ROI 的選取原則為:在柔性梁平移運動和振動時,激光點均在ROI 范圍內,同時ROI 選取范圍越小越好。在本系統中圖片的像素大小為1 600×1 200,設置的ROI 像素范圍為以(200,500)為起點,向右下長寬為800,300 像素的矩形范圍。后續只對該區域進行圖像處理。
采用高斯濾波處理圖像噪點,采用Canny算子對激光點進行閾值分割獲得激光點的外輪廓線,采用findContours 函數提取邊緣點集,通過計算圖像的幾何矩計算邊緣輪廓的重心坐標。
柔性梁的振動檢測包括滑臺固定時的定點振動檢測和滑臺移動時的實時振動檢測。由式(5)可以得到激光點在相機坐標系下坐標(xc,yc,zc)和二維投影點坐標(u,v)滿足:
代入式(7)有:
最小二乘法計算中間變量Κ代入式(10)可得相機坐標系下激光點三維坐標:
其中:a1=fxnx-(u-uo)·nz;a2=fyny-(vvo)·nz;b1=(u-uo)·zp-fx xp;b2=(v-vo)·zp-fy yp。
取滑臺固定時50 幀柔性梁靜止時的圖像,計算出初始激光點三維位置P0,則t時刻的振動量為
其中:|Pt P0|為兩點距離的絕對值;sgn 為符號函數,在建立的相機坐標系中,振動量的正負可以由t時刻激光點z坐標相對于初始激光點的z坐標的位置確定。
當電機驅動滑臺進行移動時,柔性梁面的初始參考位置發生改變,根據電機編碼器速度信息對初始參考點坐標進行修正。
如圖5 所示,滑臺在柔性梁面法向量方向移動,移動距離由電機編碼器速度信息積分獲得,由3.2.3 節標定的柔性梁法向量與3.2.2 節標定的激光法向量可計算出初始參考點沿激光線方向移動的距離:
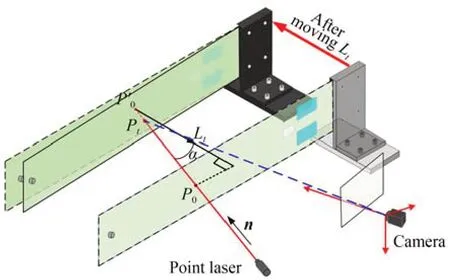
圖5 柔性梁移動時振動檢測示意圖Fig.5 Schematic diagram of vibration detection when the flexible beam is moving
將該線段分別投影至相機坐標系的三個坐標軸上獲得移動后的初始參考點坐標為:
在移動過程中t時刻柔性梁面的振動量為:
3.4 測量校正
為了保證兩柔性梁測得的振動量統一,采用與檢測柔性梁1 一致的激光位移傳感器校正點激光視覺傳感器。采用激光位移傳感器和視覺傳感器分別采集柔性梁2 自由振動的信息,通過優化算法搜索點激光視覺傳感器的幅值校正系數和校正相位。幅值校正是校正點激光視覺和激光位移傳感器檢測振動幅值信息,相位校正是因為圖片的處理耗時使得視覺檢測系統檢測振動測量會滯后于激光位移傳感器。
4 直接自適應模糊協同控制器設計
直接自適應模糊協同控制器包括直接自適應模糊控制器和智能協同控制器兩部分。其中直接自適應模糊控制為主要控制律,基于模糊規則進行反饋,對外界環境或實驗系統存在的不確定性或干擾有較好的魯棒性;協同控制器利用生物激素分泌的知識對控制量進行增強或抑制的補償,從而獲得一個較好的控制效果。
4.1 模糊控制器設計
直接自適應模糊控制器為[14]:
其中:ξ(x)為維向量,其第l1,l2,…,ln個元素為[14]:
由式(16)得:
根據系統的雙梁結構,令:
其中:i=1, 2 分別對應兩根柔性梁。
式(31)可以寫成:
定義最優參數為:
定義最小逼近誤差為:
自適應律為[14]:
4.2 協同控制器設計
協同控制器[10]是基于人體生長激素雙向調節機制設計的一種智能控制器。控制器原理如圖6 所示。設計包含增強控制單元和抑制控制單元的融合控制方法對直接自適應模糊控制律uD進行優化。仿照人的激素調節規律,當偏差大小發生變化時,增強和抑制控制單元分別輸出對應的控制補償量。
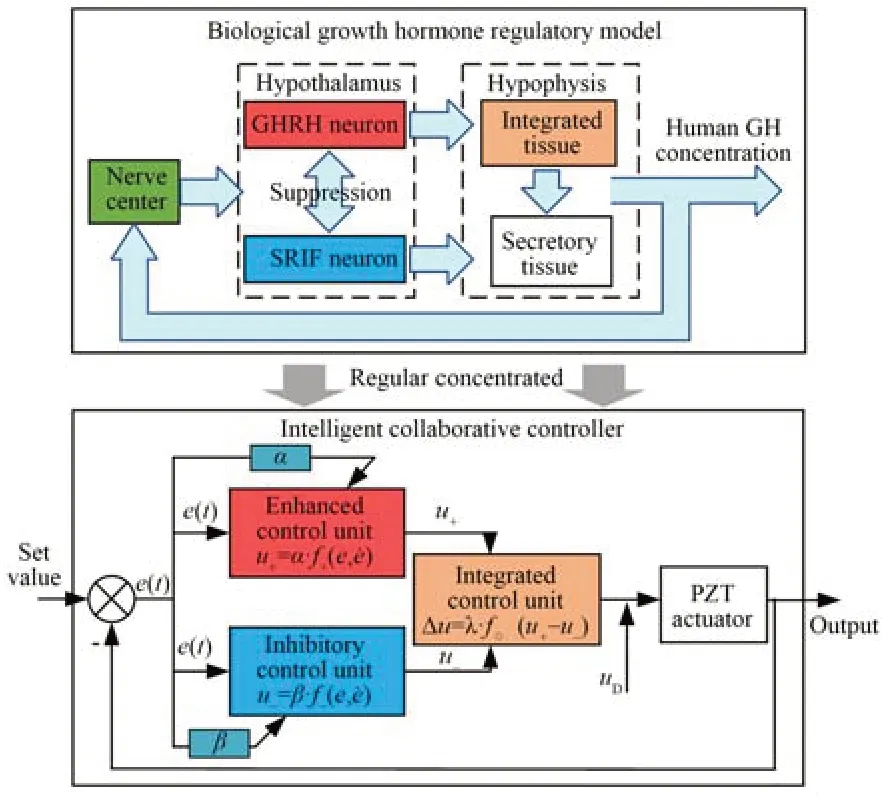
圖6 智能協同控制器原理圖Fig.6 Schematic diagram of intelligent collaborative controller
設增強控制單元的輸出量為:
其中:f+(·)為增強控制單元控制律,α>1 為增強因子。
設抑制控制單元的輸出量為:
其中:f-(·)為抑制控制單元控制律,β>0 為抑制因子。
設融合控制單元的輸出量為:
其中,λ為正數。
根據人體GHRH 和SRIF 激素分泌機理[19-20],對協同控制器增強因子和抑制因子進行設計:
其中:i=1,2 分別對應兩根柔性梁,|ei(t)|為偏差絕對值;Ai1~i3,Bi1~i3和n1~2為大于零實數,δ為失效因子,當JM≥ε時(閾值ε為正實數,JM=為柔性梁振動模態指標),δ=0,反之δ=1。
4.3 控制器參數優化
羚羊優化算法[21]模擬了瞪羚逃避捕食者的行為,對多維參數優化有高效的性能。采用該優化器對直接自適應模糊協同控制器的參數進行優化,優化對象為雙梁對應的Λ1,2矩陣參數k11,k12,k21,k22以及雙梁的增強抑制因子參數A11~13,A21~23,B11~13,B21~23,參數優化的目標為在目標函數的指導下,保持和對照PD 實驗相同的初始控制飽和周期,并且實現更快的振動抑制。
設置優化的適應度函數:
其中:g1~3為權重系數;sum(·)為對兩根柔性梁的偏差絕對值與控制電壓平方值求和;tend為振動停止時間,設置當雙梁的位置誤差和速度誤差值均小于0.001 時振動停止。優化的適應度函數為:ffitness=1/J。直接自適應模糊協同控制器的控制律為uDAFC=uD+Δu。
5 柔性梁振動控制實驗研究
5.1 標定結果
采集30 張標定圖片,采用3.2 節的標定方法得到相機內參標定結果,如表2 所示。

表2 單目相機內參標定結果Tab.2 Monocular camera internal reference calibration results
點激光方程為:(xc+142.466 9)/0.318 8=(yc-29.037 9)/-0.074 02=(zc-928.325 4)/0.944 9.
梁面法向量為( -0.309 5,0.075 5,-0.947 9)。則激光線與梁面法方向夾角α0=0.568 3°。標定后,分別用點激光視覺振動檢測系統和激光位移傳感器同時測量柔性梁2 的振動信息,進行比較可知,點激光結構光的振動測量精度小于0.1 mm,滿足該實驗系統的振動測量要求。
5.2 控制器優化結果
采用辨識后的狀態空間模型進行振動控制的仿真優化。設置直接自適應模糊控制部分的參數γ=12;隸屬度函數為:
優化結果如表3 所示。

表3 控制器參數優化結果Tab.3 Controller parameter optimization results
5.3 實驗結果
為了驗證點激光視覺傳感器的檢測和DAFC 控制器的控制效果,采用大增益PD 控制作為對比。PD 控制參數選擇原則是:在初始激勵幅值相同的條件下,與DAFC 控制器保持一致的飽和控制周期。PD 參數選取為kp=10,kd=0.25;采樣頻率為50 Hz;所有實驗采用相同的濾波器參數,為了補償濾波器帶來的相位滯后,PD控制中對信號進行6 個采樣周期的相位補償,DAFC 為非線性控制器,魯棒性較高無需補償。分別進行滑臺固定和移動時的柔性梁系統振動控制實驗。
圖7 為滑臺固定時柔性梁耦合系統單梁激勵下的自由振動信號。柔性梁系統受激后產生了難以快速衰減的振動信號,振動過程存在明顯的拍頻現象,說明雙柔性梁系統具有前二階振動模態耦合關系。

圖7 自由振動實驗Fig.7 Free vibration experiment
圖8 為滑臺固定時的DAFC 和PD 控制實驗對比。圖8(a)和圖8(b)分別為柔性雙梁的振動信號。柔性梁系統在激勵柔性梁2 產生耦合振動后,在DAFC 控制器開始控制后約9 s 振動被完全抑制。而在大增益PD 控制開始13 s 后,小振幅振動仍然存在。圖8(c)和圖8(d)分別為雙梁的兩種控制方法的控制電壓信號對比。從實驗結果可知DAFC 控制器的控制電壓具有非線性特性,在開始控制初期一直保持大的控制量,在大幅值振動被快速抑制,小振幅振動也被迅速抑制。大增益PD 控制對大值振動抑制效果較好,但進入小振幅振動狀態時很難快速抑制,這是因為線性控制器小幅值振動對應小幅值線性控制量。
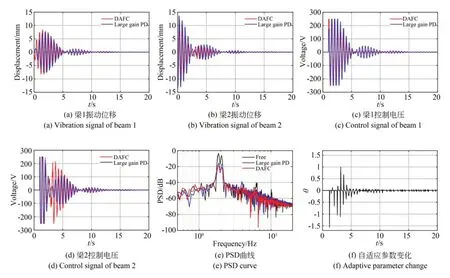
圖8 滑臺固定時振動控制實驗Fig.8 Vibration control experiment when sliding table is fixed
圖8(e)所示為前20 s 振動信號的功率譜密度(PSD)圖,振動信號的功率譜密度表示了信號中不同頻率成分的功率的大小,圖中峰值點對應的頻率值即為該信號的主要頻率成分。在1.892 0 Hz 和2.076 5 Hz 位置出現的雙峰對應著雙柔性梁系統的第一階同向振動模態和第二階反向振動模態。可以看出DAFC 控制下PSD 峰值低于PD 控制,并且兩種控制的峰值都低于自由振動,驗證了DAFC 算法可以更好地抑制兩個主頻率上的振動能量,實現更好的控制效果。圖8(f)為DAFC 自適應律θ的部分參數變化趨勢,隨著振動被逐漸控制,自適應參數變化也逐漸趨近穩定。
在系統進行梯形軌跡平移運動時,雙柔性梁主要激勵第一階同向彎曲振動模態,如圖9(a)所示。圖9(b)為梯形軌跡運動時同時進行壓電主動控制下的一階彎曲模態振動信號。一階彎曲模態振動在DAFC 控制器開始控制后約11 s 振動被完全抑制,而在大增益PD 控制開始14 s 后振動才被完全抑制,DAFC 控制器抑振效果更加明顯快速。
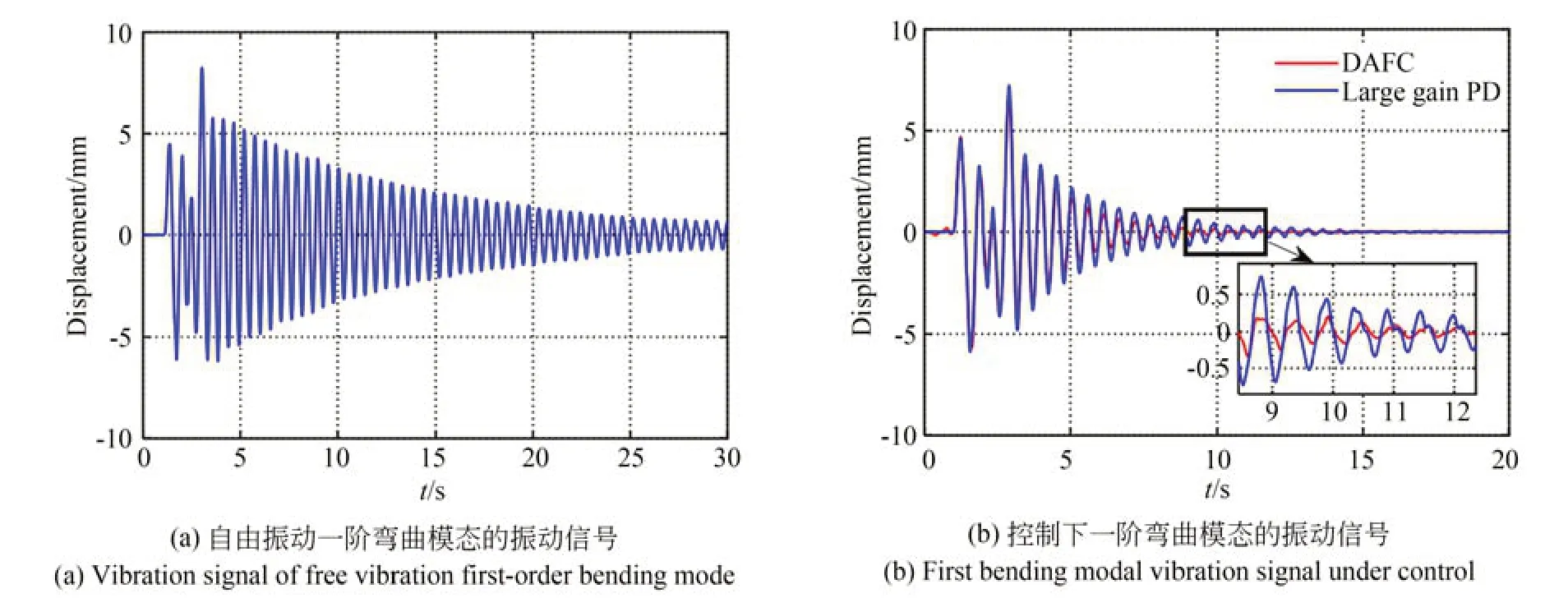
圖9 梯形軌跡移動下的模態振動曲線Fig.9 Modal vibration curves under trapezoidal trajectory movement
6 結 論
本文建立了一套基于點激光視覺進行雙柔性梁耦合結構振動檢測和控制系統。通過有限元和動力學方程建立系統狀態空間方程,并采用小波函數和優化方法校正了模型參數。
提出了一種基于點激光視覺的標定、圖像處理和振動測量方法。針對系統中存在的不確定性和非線性因素,為了實現快速振動抑制,采用直接自適應模糊協同控制方法進行振動控制實驗研究。實驗結果驗證了點激光視覺振動測量方法可以達到反饋控制的要求,直接自適應模糊協同控制器在10 s 左右可以完全抑制振動。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45