基于RK3288的自動識別系統(tǒng)智能船載終端
2023-12-21 11:59:21李海博
電子產(chǎn)品世界 2023年10期
李海博
關(guān)鍵詞:智能船載終端;RK3288;硬件設(shè)計;軟件架構(gòu);全球?qū)Ш叫l(wèi)星系統(tǒng);船舶自動識別系統(tǒng)
中圖分類號:U666.1 文獻標識碼:A
0引言
隨著現(xiàn)代海洋技術(shù)和信息化的快速發(fā)展,船舶自動識別系統(tǒng)(AIS)[1] 和全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)[2] 等船舶導(dǎo)航和監(jiān)控設(shè)備的需求量逐漸增加。船舶在復(fù)雜的海洋環(huán)境中需要對多種信息進行實時處理和展示,包括但不限于導(dǎo)航、位置跟蹤、海圖展示和多媒體信息處理。然而,現(xiàn)有的船載終端系統(tǒng)存在硬件性能較差、軟件兼容性不高以及信息整合方面混亂等問題。
為了解決上述問題,本文設(shè)計并實現(xiàn)了一款基于RK3288 [3] 的船舶自動識別系統(tǒng)智能船載終端。該系統(tǒng)不僅集成了高性能的硬件計算能力和豐富的外部接口,還具備高度模塊化的軟件架構(gòu),能夠進行各種功能拓展。本系統(tǒng)兼顧了實時性能和高度可靠性,能有效提升船舶的導(dǎo)航和信息處理能力。
本文首先介紹了系統(tǒng)的總體架構(gòu)和各個組成模塊,包括硬件設(shè)計、軟件架構(gòu)以及與外部設(shè)備的數(shù)據(jù)接口等。其次,對系統(tǒng)的實現(xiàn)過程和關(guān)鍵技術(shù)進行了深入分析。最后,通過一系列實驗來驗證系統(tǒng)的性能和可靠性。
1 系統(tǒng)硬件設(shè)計
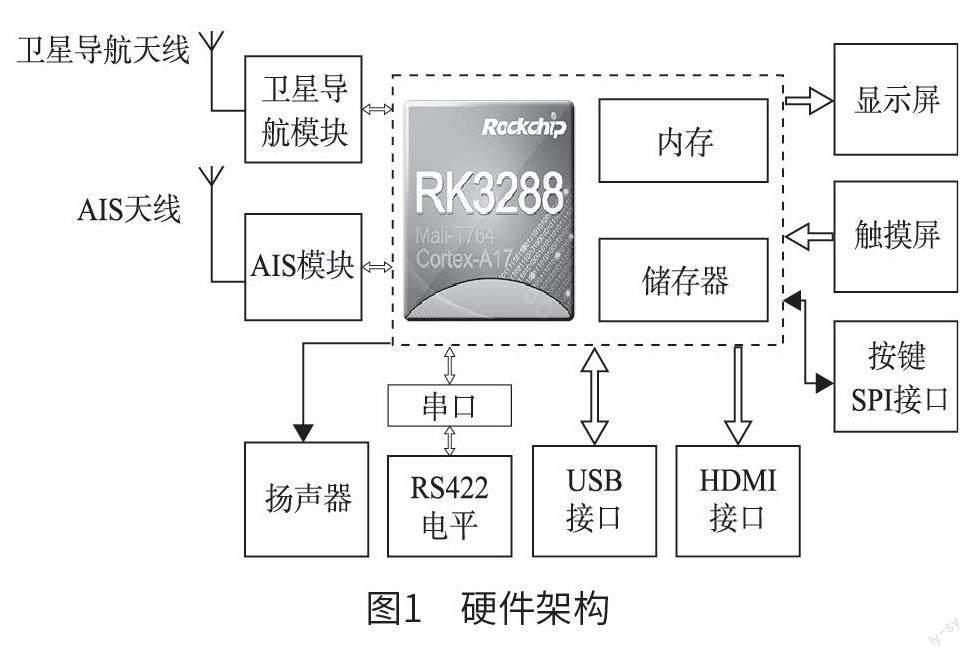
基于RK3288 構(gòu)建的智能船載終端具有多模塊、多接口的特性。這一設(shè)計不僅實現(xiàn)了與GNSS和AIS 模塊的集成,以便進行高精度導(dǎo)航和自動識別,而且通過隨機訪問存儲器(DDR4 RAM)[4] 和嵌入式多媒體卡(eMMC)存儲芯片確保了數(shù)據(jù)高速處理和數(shù)據(jù)長期存儲。系統(tǒng)還包括通用串行總線(USB)、高清晰度多媒體接口(HDMI)、422 差分信號串行通信標準(RS422)、揚聲器接口(SPK)接口,并通過串行外設(shè)接口(SPI)總線連接按鍵和屏幕低壓差分信號(LVDS)接口,從而實現(xiàn)與多種外界設(shè)備的高度互操作性。
1.1 設(shè)計需求分析
由于RK3288 具有優(yōu)越的多核處理能力與數(shù)據(jù)高吞吐量,因此選用其作為本船載終端系統(tǒng)的核心處理單元,為復(fù)雜的數(shù)據(jù)流解析和處理任務(wù),如GNSS和AIS 模塊的數(shù)據(jù),提供了強有力的計算支持。加入DDR4 RAM 與eMMC 存儲芯片作為外掛存儲單元,旨在優(yōu)化數(shù)據(jù)存儲與運行效率。DDR4 RAM 主要負責高速緩存運行數(shù)據(jù),以減少讀寫延遲,提高數(shù)據(jù)處理效率。相對地,eMMC 用于持久地存儲關(guān)鍵系統(tǒng)信息,如系統(tǒng)配置文件和日志記錄。
多接口設(shè)計考量則是為了確保與其他船載設(shè)備和系統(tǒng)的兼容性和互操作性。USB、HDMI、RS422及SPK 接口的集成不僅拓寬了外設(shè)連接的靈活性,還加強了系統(tǒng)與外部世界的數(shù)據(jù)交流能力。RS422接口通過通用異步收發(fā)器(UARTs)與主處理單元連接[5],主要用于高穩(wěn)定性和長距離的數(shù)據(jù)通信,特別是在船舶這種惡劣環(huán)境中。
在用戶交互方面,通過SPI 總線實現(xiàn)按鍵連接,旨在提供一種低延遲和高可靠性的用戶輸入方法。在視覺輸出方面,通過LVDS 接口與顯示屏連接,支持高分辨率和高刷新率的圖像輸出,以優(yōu)化用戶體驗。
硬件架構(gòu)如圖1 所示。總體而言,本硬件設(shè)計方案綜合多方面需求與優(yōu)化目標,力求實現(xiàn)船載終端的多功能性和高性能運算,從而滿足航海安全和船員操作需求。
1.2 接口與驅(qū)動實現(xiàn)
1.2.1 接口設(shè)備
考慮到終端涉及多種功能模塊,如GNSS 和AIS,以及多樣的用戶交互需求,RK3288 的多接口能力成為解決方案的核心。RK3288 不僅具備出色的計算能力,而且支持多種通信協(xié)議和接口標準,這對于本系統(tǒng)是至關(guān)重要的。
為了滿足各種海上導(dǎo)航和信息交互需求,本設(shè)計考慮了每個接口的功能定位和性能需求。USB 接口用于與其他船載設(shè)備或外部存儲設(shè)備的數(shù)據(jù)交換,而HDMI 接口則為用戶提供高質(zhì)量的圖形輸出。這些接口的驅(qū)動實現(xiàn)都依托于RK3288 強大的系統(tǒng)資源和豐富的接口支持。
1.2.2 GNSS 與AIS模塊
本系統(tǒng)實現(xiàn)了GNSS 發(fā)出的NMEA0183 語句以及AIS 發(fā)出的AIS 報文的解析與利用。這一部分的具體實現(xiàn)細節(jié)涉及底層數(shù)據(jù)解析和上層應(yīng)用之間的高效配合。其中,NMEA0183 語句的解析不僅可以獲取定位信息,還可以與其他模塊如AIS 等進行數(shù)據(jù)融合,以提供更為全面和準確的導(dǎo)航信息。
1.2.3 數(shù)據(jù)交換與傳輸
為確保數(shù)據(jù)的高速、穩(wěn)定傳輸,本系統(tǒng)專門采用100 M/1000 M 網(wǎng)絡(luò)口作為數(shù)據(jù)接口。通過該網(wǎng)絡(luò)口,所有設(shè)備數(shù)據(jù)都能進行高效的交換和傳輸,從而為實時數(shù)據(jù)處理和決策提供可靠的支持。
接口與驅(qū)動的設(shè)計和實現(xiàn)是一個系統(tǒng)集成和優(yōu)化的過程,需綜合考慮硬件、軟件和應(yīng)用層多個方面。通過合理的接口設(shè)計和驅(qū)動實現(xiàn),本系統(tǒng)在滿足各種復(fù)雜功能和環(huán)境需求的同時,也確保了系統(tǒng)的高效性和穩(wěn)定性。
1.3 設(shè)計優(yōu)點
1.3.1 高度集成與空間效率
本系統(tǒng)整合了RK3288 與多種外部模塊,具有高度的集成性。這一設(shè)計不僅簡化了硬件架構(gòu),還在有限的船艙空間內(nèi)實現(xiàn)了多功能集成,提供了一站式的解決方案。
1.3.2 多功能接口與可擴展性
通過RK3288 的豐富接口支持(包括但不限于USB、HDMI、RS422),本系統(tǒng)確保了極高的可擴展性。各種接口的多樣性允許系統(tǒng)靈活地適應(yīng)不同應(yīng)用場景,并能輕易地進行功能升級或擴展。
每個功能模塊都采用獨立的設(shè)計方案和特定的通信接口,并形成設(shè)計規(guī)范。這種模塊化設(shè)計不僅簡化了系統(tǒng)的硬件結(jié)構(gòu),還在產(chǎn)品更新?lián)Q代時實現(xiàn)了引擎層和應(yīng)用層代碼的無感化替換。
1.3.3 環(huán)境穩(wěn)定性與可靠性
考慮到海上環(huán)境的多變性,特別是潮濕和鹽霧的影響,本設(shè)計對所有硬件接口進行了防潮、防鹽處理。這極大提高了系統(tǒng)在惡劣環(huán)境下的穩(wěn)定性和可靠性。
1.3.4 數(shù)據(jù)處理能力與用戶交互性
本系統(tǒng)能夠高效地解析和處理來自GNSS 和AIS 模塊的復(fù)雜數(shù)據(jù),支持高精度的導(dǎo)航和監(jiān)控。同時,通過LVDS 顯示屏和SPK 接口,本系統(tǒng)提供了豐富和直觀的用戶交互方式,進一步提升了用戶體驗。
2 系統(tǒng)軟件設(shè)計
2.1 軟件系統(tǒng)架構(gòu)
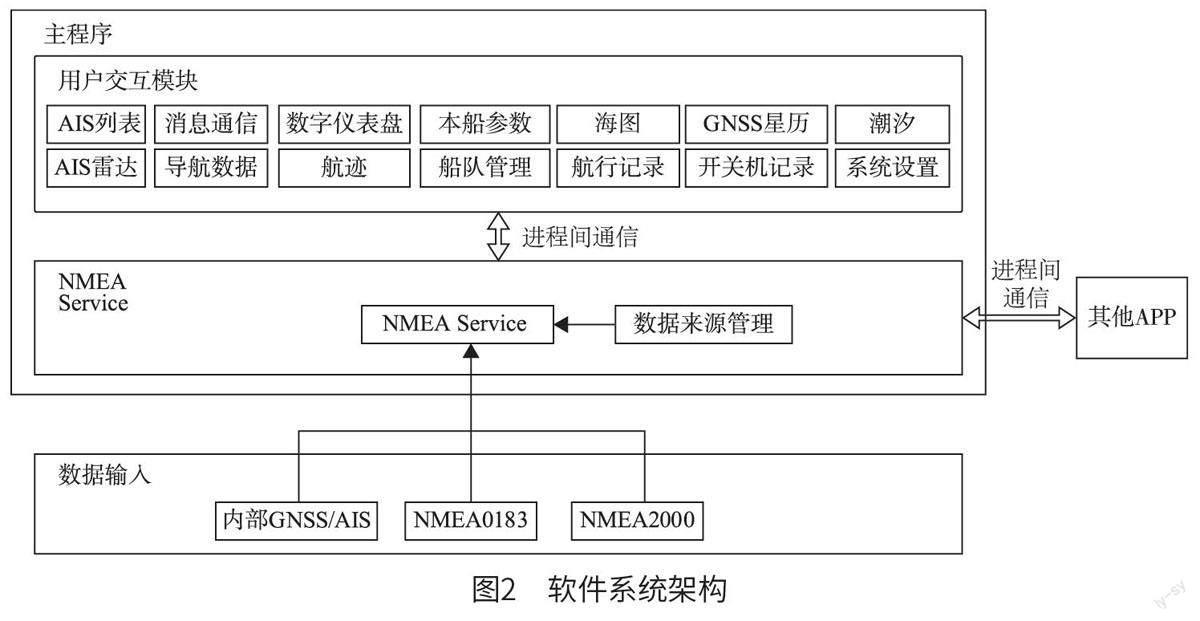
基于RK3288 搭載的Android 操作系統(tǒng),智能船載終端的軟件設(shè)計主要由一個主程序及其子模塊構(gòu)成[6]。主程序是整個軟件系統(tǒng)的核心,負責統(tǒng)籌和控制各個子模塊的運行,如圖2 所示。
從業(yè)務(wù)角度出發(fā),主程序可劃分為兩大核心功能模塊:NMEA 信息服務(wù)(NMEA Service)模塊[7]和用戶交互模塊。① NMEA 信息服務(wù)模塊: 這個模塊承擔了對GNSS、AIS、水深等數(shù)據(jù)的解析和處理任務(wù)。除了數(shù)據(jù)解析和處理,該模塊還負責管理各個數(shù)據(jù)源,并對外提供信息查詢服務(wù)。為確保數(shù)據(jù)處理的穩(wěn)定性和可靠性,NMEA 信息服務(wù)模塊在單獨的進程中運行。②用戶交互模塊: 作為承擔接收和處理信息的角色,這一模塊負責獲取、加工和展示由NMEA 信息服務(wù)模塊提供的通導(dǎo)信息。此外,該模塊還負責接收和處理用戶的操作反饋,如界面操作或命令輸入等。
數(shù)據(jù)和命令的交換是通過gRPC(進程間通信)機制完成的[8],確保了系統(tǒng)各組件能夠高效、安全地共享信息。整個軟件系統(tǒng)采用模塊化設(shè)計,優(yōu)化了系統(tǒng)的可維護性和可擴展性。特別是采用單獨進程來運行NMEA 信息服務(wù)模塊,既確保了服務(wù)的穩(wěn)定性,又方便了其他模塊或應(yīng)用通過gRPC 來獲取必要的服務(wù)信息,從而實現(xiàn)了功能的靈活擴展。
2.2 NMEA 信息服務(wù)模塊
NMEA 信息服務(wù)模塊是系統(tǒng)主程序的核心組成部分,負責對由內(nèi)部AIS 和GNSS 模塊接收到的信息進行全面處理。該模塊接收通過NMEA0183 和NMEA2000 協(xié)議通信接口輸入的數(shù)據(jù),執(zhí)行數(shù)據(jù)解析和融合操作,并通過一個設(shè)定好的信息訪問接口進行信息發(fā)布。因為NMEA 服務(wù)是其他業(yè)務(wù)模塊的基礎(chǔ),該模塊在系統(tǒng)啟動后會立即自動初始化并開始其數(shù)據(jù)處理活動。
2.2.1 線程架構(gòu)
該模塊內(nèi)部采用多線程架構(gòu)以提高數(shù)據(jù)處理的效率和并發(fā)性,具體分為兩個主要處理線程。
(1)串口數(shù)據(jù)處理線程。此線程負責從串口讀取NMEA 數(shù)據(jù),包括但不限于GNSS 和AIS 信息。讀取完成后,解析這些數(shù)據(jù)并將得到的信息實時推送到信息處理線程進行進一步整合。
(2)信息處理線程。此線程的主要職責是進行串口管理和NMEA 信息整合。它會接收從串口數(shù)據(jù)處理線程推送過來的各類NMEA 信息,并根據(jù)預(yù)設(shè)的規(guī)則和算法進行信息的整合和融合。
2.2.2 功能實現(xiàn)
解析算法能快速地從原始NMEA 數(shù)據(jù)中提取關(guān)鍵信息,而高度復(fù)雜的數(shù)據(jù)融合算法則確保了從不同源接收到的數(shù)據(jù)能被智能地整合,從而能提供全面且精確的導(dǎo)航和船舶狀態(tài)信息。
外部信息訪問主要通過gRPC 或其他定制的通信協(xié)議來實現(xiàn),以便其他業(yè)務(wù)模塊或應(yīng)用方便地訪問和利用這些處理后的NMEA 信息。該模塊在整個系統(tǒng)中占據(jù)核心地位,是整個系統(tǒng)穩(wěn)健運行的關(guān)鍵,體現(xiàn)在高數(shù)據(jù)處理效能和持續(xù)可用性方面。
2.3 海圖模塊
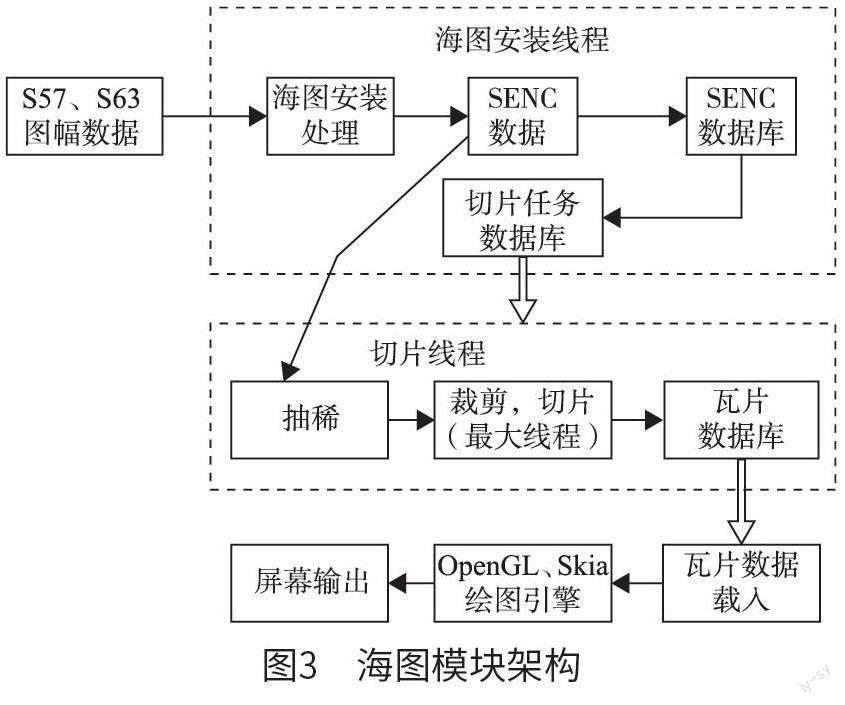
海圖模塊是用戶交互模塊中的樞紐,具有匯集和整合定位、航向、航速和AIS 信息的功能[9]。這些信息經(jīng)由海圖模塊處理后,將直觀地呈現(xiàn)在用戶界面的海圖上,以便為船舶提供全方位的安全通航信息。該模塊包括兩個關(guān)鍵線程,即海圖安裝線程和切片線程,如圖3 所示。
海圖安裝線程主要負責將系統(tǒng)電子航海圖(SENC)數(shù)據(jù)加載到特定的SENC 數(shù)據(jù)庫中。盡管SENC 數(shù)據(jù)庫的數(shù)據(jù)量龐大,但通過切片線程與OpenGL(開放圖形庫)子集ES,并結(jié)合使用GPU加速優(yōu)化性能。這種設(shè)計方式顯著提高了圖像渲染效率,實現(xiàn)了每秒30 幀的顯示性能,從而增強了用戶體驗。
切片線程執(zhí)行的是一系列高度優(yōu)化的數(shù)據(jù)處理操作,包括裁剪和瓦片化。在這個過程中,海圖數(shù)據(jù)首先按照預(yù)設(shè)的規(guī)格被切割成多個瓦片。每個瓦片都是經(jīng)過精確裁剪和數(shù)據(jù)抽稀的SENC 海圖小區(qū)域。這些瓦片進一步被轉(zhuǎn)換為高效的MBTile 格式并存儲,以便快速加載和渲染。
在圖像渲染方面,模塊采用OpenGL 進行圖形繪制[10]。具體而言,各種海圖元素如點、線、面和文字符號被三角化后,通過特定的著色器程序傳送給GPU 進行渲染。這種方法不僅大幅減少了CPU的負擔,而且顯著提高了圖像渲染的效率和精度。
海圖模塊的設(shè)計和實現(xiàn)突出了其在整個系統(tǒng)中的核心地位。通過高度優(yōu)化的數(shù)據(jù)處理和高性能的圖像渲染,它在提供安全通航信息方面起到了不可或缺的作用。
3 實驗與評估
3.1 自主模式測試與評估
在自主模式下,執(zhí)行了多項測試,包括發(fā)射位置報告、接收頻道A 和頻道B 位置報告、在臨近時隙接收以及接收性能測試。所有測試都在標準環(huán)境中進行,并且待測設(shè)備(EUT)成功地通過了所有測試項目。
(1)發(fā)射位置報告:EUT 成功發(fā)射了超短波數(shù)據(jù)鏈(VDL)消息,與預(yù)期一致。
(2)接收頻道A 和頻道B 位置報告: EUT 在預(yù)設(shè)時間段內(nèi)成功接收了從其他設(shè)備發(fā)射的位置報告,無任何錯誤或延遲。
(3)在臨近時隙接收: EUT 能夠正確處理在臨近時隙內(nèi)發(fā)生的數(shù)據(jù)接收,證明了其處理能力和靈活性。
(4)接收性能測試: 在高負荷條件下,EUT 依然能夠保持高性能,證實了其在各種情況下的穩(wěn)定性。
3.2 指派模式測試與評估
在指派模式下,對小組任務(wù)和基站預(yù)留兩個方面進行深入的測試。
(1)小組任務(wù):在自主模式下,EUT 能成功接收和執(zhí)行發(fā)射的小組任務(wù)指令消息,結(jié)果符合預(yù)期。
(2)基站預(yù)留:EUT 能準確地在預(yù)定的時間段內(nèi)發(fā)射預(yù)留消息,確保了系統(tǒng)的穩(wěn)定運行。
3.3 調(diào)查模式/ 詢問響應(yīng)測試與評估
這一部分主要測試了EUT 對詢問消息18 和24,以及消息19 的響應(yīng)。
(1)詢問消息18 和24:EUT 成功地響應(yīng)了通過VDL 發(fā)出的詢問消息,并返回了正確的消息18 和24。
(2)消息19 的響應(yīng):在自主模式下,EUT 成功地響應(yīng)了消息19 的詢問,結(jié)果符合預(yù)期。
4 結(jié)論與展望
本文成功設(shè)計了一款基于RK3288[3] 的船舶自動識別系統(tǒng)智能船載終端,并進行了實驗驗證。通過對NMEA 信息服務(wù)模塊、用戶交互模塊及海圖模塊的深入研究與設(shè)計,得出該系統(tǒng)不僅在技術(shù)層面達到了高度優(yōu)化,而且在實用性和用戶體驗方面表現(xiàn)出色。值得一提的是,設(shè)備在自主模式、指派模式和調(diào)查模式/ 詢問響應(yīng)下均順利通過了各項功能和性能測試,充分證明了其可行性和高效性。
未來仍可在數(shù)據(jù)融合和分析、用戶體驗、系統(tǒng)安全性、模塊擴展性等多個方向進行深入研究。特別是在系統(tǒng)安全性和模塊擴展性方面,有待進一步強化,以適應(yīng)更為復(fù)雜和多變的海上環(huán)境。期望通過持續(xù)的優(yōu)化和改進,該海洋導(dǎo)航系統(tǒng)能在未來得到更廣泛的應(yīng)用,并持續(xù)推動相關(guān)領(lǐng)域的技術(shù)創(chuàng)新。
