I2 控制單電感雙輸出Buck LED 驅(qū)動(dòng)電源交叉影響分析
2023-12-21 09:43:20楊德鑫徐利梅
西南交通大學(xué)學(xué)報(bào) 2023年6期
王 瑤 ,陳 玲 ,楊德鑫 ,徐利梅
(1.西南民族大學(xué)電氣工程學(xué)院,四川 成都 610041;2.重慶工業(yè)職業(yè)技術(shù)學(xué)院電子與物聯(lián)網(wǎng)工程學(xué)院,重慶 401120)
LED 具有壽命長(zhǎng)、能耗低以及綠色無污染等優(yōu)點(diǎn),在住宅照明、交通照明和景觀照明等領(lǐng)域得到了廣泛應(yīng)用[1-2].由于LED 大部分情況下都是多顆同時(shí)運(yùn)行,因此多顆LED 的驅(qū)動(dòng)通常有單路LED 驅(qū)動(dòng)電源和多路LED 驅(qū)動(dòng)電源2 種方式.單路LED 驅(qū)動(dòng)電源通duo 用于驅(qū)動(dòng)串聯(lián)連接的多顆LED,如果其中一個(gè)LED 斷路,則該路LED 將全部不亮,且串聯(lián)LED 需要較高的驅(qū)動(dòng)電壓.多路LED 驅(qū)動(dòng)電源通常用于驅(qū)動(dòng)多串LED,存在成本高、體積大等問題.
單電感多輸出(single-inductor multiple-output,SIMO)LED 驅(qū)動(dòng)電源利用一個(gè)電感給多條LED 支路提供輸出,減少了元器件的數(shù)量,從而減小驅(qū)動(dòng)電源的體積,降低成本[3].目前,SIMO LED 驅(qū)動(dòng)電源的研究主要集中于電流的精準(zhǔn)調(diào)節(jié)以及相應(yīng)的控制方案改進(jìn)等[4-6].文獻(xiàn)[7]提出一種AC/DC SIMO LED驅(qū)動(dòng)電源,該LED 驅(qū)動(dòng)電源實(shí)現(xiàn)了每路LED 的精確獨(dú)立電流控制.文獻(xiàn)[8]提出升壓型和降壓型SIMO LED 驅(qū)動(dòng)電源,采用回饋電流控制方法保證電源工作于寬負(fù)載范圍,該方法采用一個(gè)控制回路,不能實(shí)現(xiàn)各個(gè)輸出支路的獨(dú)立調(diào)節(jié).文獻(xiàn)[9]提出了分時(shí)復(fù)用控制SIMO Boost LED 驅(qū)動(dòng)電源,能夠獨(dú)立調(diào)節(jié)各個(gè)LED 支路.文獻(xiàn)[10]提出的無電流采樣電阻控制策略為提高多路LED 驅(qū)動(dòng)電源可靠性提供了一種有效的解決方案.文獻(xiàn)[11]提出一種適用于大功率照明的大范圍連續(xù)可調(diào)光SIMO Buck LED 驅(qū)動(dòng)電源,其采用脈沖寬度調(diào)制技術(shù),靈活精確地控制LED 的亮度,顯著提高了調(diào)光頻率.文獻(xiàn)[12]提出的SIMO LED 驅(qū)動(dòng)電源實(shí)現(xiàn)了軟開關(guān),包括零電流開關(guān)和零電壓開關(guān),消除了較大的開關(guān)損耗,提高了電源效率.
實(shí)際上,SIMO LED 驅(qū)動(dòng)電源的輸出電流是相互關(guān)聯(lián)的.一路輸出支路的電流變化會(huì)影響其他輸出支路的電流,輸出電流間存在交叉影響[13].然而,目前對(duì)SIMO LED 驅(qū)動(dòng)電源的交叉影響問題[14-15]報(bào)道甚少.文獻(xiàn)[14]采用時(shí)間復(fù)用控制方案來管理開關(guān)周期,可以在LED 電流之間產(chǎn)生系統(tǒng)差異,使每個(gè)周期只有一個(gè)開關(guān)管處于導(dǎo)通狀態(tài),從而解決交叉影響問題.文獻(xiàn)[15]介紹了一種基于時(shí)分復(fù)用控制和置換導(dǎo)通序列的連續(xù)導(dǎo)電模式(continuous conduction mode,CCM)SIMO Boost 驅(qū)動(dòng)電源,可以同時(shí)驅(qū)動(dòng)多個(gè)通道的LED,使每個(gè)通道的LED 具有相同的電流和亮度,不僅減小了電路損耗,而且降低了輸出支路間的交叉影響.為簡(jiǎn)化控制,文獻(xiàn)[16]提出了工作于CCM 的混合平均電流控制SIMO Buck LED驅(qū)動(dòng)電源,用于LED 的多色調(diào)光.文獻(xiàn)[17]提出了工作于CCM 的平均電流修正控制SIMO Buck LED驅(qū)動(dòng)電源,其電感電流在每個(gè)時(shí)段能被各個(gè)LED 支路利用,提高了調(diào)光頻率和發(fā)光效率,且減小了各輸出支路間的交叉影響.工作于CCM 的 SIMO LED驅(qū)動(dòng)電源的交叉影響問題關(guān)系其穩(wěn)定性,目前還缺乏較深入的理論分析和較好的解決方法,因此,研究工作于CCM 的SIMO LED 驅(qū)動(dòng)電源的交叉影響及抑制方法具有重要意義.
為減小工作于CCM 的單電感雙輸出(singleinductor dual-output,SIDO)Buck LED 驅(qū)動(dòng)電源輸出支路間的交叉影響,本文提出一種電流-電流(current-current,I2)控制SIDO Buck LED 驅(qū)動(dòng)電源,詳細(xì)分析其工作原理;基于狀態(tài)空間平均法和電流紋波波形,建立I2控制SIDO Buck LED 驅(qū)動(dòng)電源的小信號(hào)模型;通過I2控制和電壓控制SIDO Buck LED 驅(qū)動(dòng)電源的交叉影響傳遞函數(shù),對(duì)比分析輸出支路間的交叉影響大小;最后,通過實(shí)驗(yàn)結(jié)果驗(yàn)證理論分析的正確性.
1 SIDO Buck LED 驅(qū)動(dòng)電源
1.1 工作原理
根據(jù)LED 的伏安特性,可以將LED 等效為開啟電壓源vd、理想二極管Dd和等效電阻Rd的串聯(lián)電路[13,18],如圖1 所示.
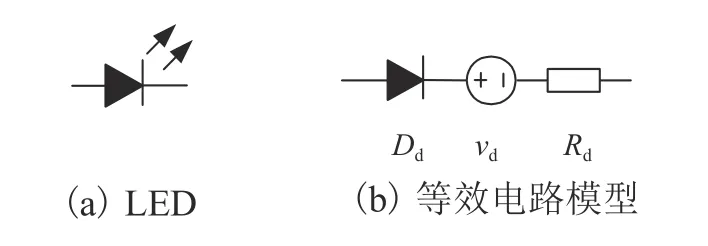
圖1 LED 及其等效電路模型Fig.1 LED and its equivalent circuit model
圖2 為SIDO Buck LED 驅(qū)動(dòng)電源的原理圖,包括輸入電壓vi,電感L,輸出電容C1、C2,二極管VD1、VD2,開關(guān)管S1、S2,LED1輸出支路和LED2輸出支路.vi通過電感L將能量傳遞給LED1、LED2輸出支路,iL為電感電流,i1、i2(v1、v2)分別為L(zhǎng)ED1、LED2輸出支路的輸出電流(輸出電壓),v1>v2.S1、S2的控制信號(hào)和導(dǎo)通占空比分別為Vg1、Vg2和d1、d2.
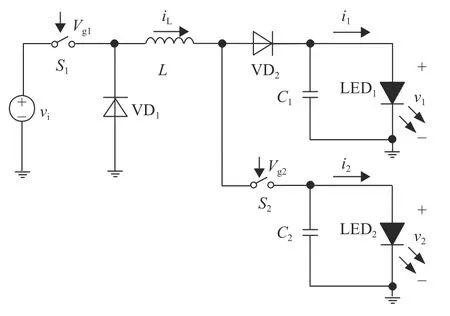
圖2 SIDO Buck LED 驅(qū)動(dòng)電源原理Fig.2 Principle of SIDO Buck LED driver
d1和d2存在3 種大小關(guān)系:d1<d2,d1=d2,d1>d2.當(dāng)d1<d2時(shí),SIDO Buck LED 驅(qū)動(dòng)電源有3 種開關(guān)狀態(tài)(開關(guān)狀態(tài)Ⅰ~Ⅲ),如圖3 所示.
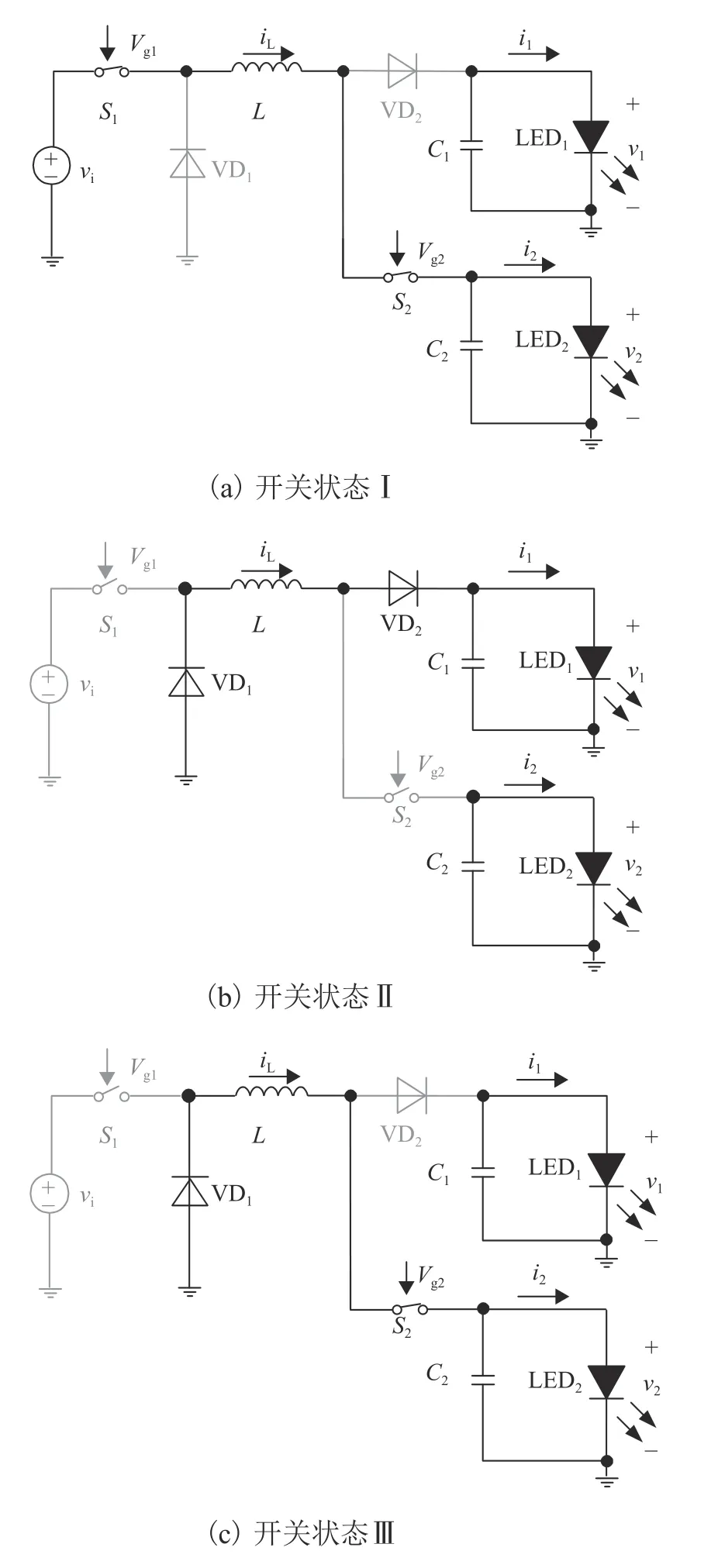
圖3 3 種開關(guān)狀態(tài)的電路拓?fù)銯ig.3 Circuit topologies of three switch modes
1)開關(guān)狀態(tài)Ⅰ:開關(guān)管S1、S2導(dǎo)通,二極管VD1、VD2關(guān)斷;輸入電壓vi給電感L和電容C2充電,并向LED2供電;電容C1向LED1供電.
2)開關(guān)狀態(tài)Ⅱ:二極管VD1、VD2導(dǎo)通,開關(guān)管S1、S2關(guān)斷,電感L向電容C1充電,并向LED1供電;電容C2向LED2供電.
3)開關(guān)狀態(tài)Ⅲ:開關(guān)管S2和二極管VD1導(dǎo)通,開關(guān)管S1、二極管VD2關(guān)斷;電感L給電容C2充電,并向LED2供電;電容C1向LED1供電.
1.2 小信號(hào)模型
設(shè)狀態(tài)變量x=[iLv1v2]T,輸入向量u=[vivd1vd2]T,vd1和vd2分別為L(zhǎng)ED1和LED2的開啟電壓,Rd1和Rd2分別為L(zhǎng)ED1和LED2的等效電阻.SIDO Buck LED 驅(qū)動(dòng)電源工作于開關(guān)狀態(tài)Ⅰ、Ⅲ時(shí),對(duì)應(yīng)的狀態(tài)方程分別為
式中:
采用狀態(tài)空間平均方法[19],可得SIDO Buck LED驅(qū)動(dòng)電源的狀態(tài)空間平均模型為
式中:s為拉氏變換復(fù)變量.
2 I2 控制SIDO Buck LED 驅(qū)動(dòng)電源
2.1 工作原理
圖4 為I2控制SIDO Buck LED 驅(qū)動(dòng)電源原理圖,由圖2 所示主電路和I2控制電路2 部分組成,控制電路包括I2控制電路Ⅰ和I2控制電路Ⅱ.在I2控制電路Ⅰ中,輸出電流i1流過采樣電阻Rs1,測(cè)取采樣電阻Rs1兩端電壓Rs1i1獲取采樣后的輸出電流;Rs1i1通過誤差放大器AM1與參考信號(hào)iref1做差后得到信號(hào)vo1;vo1通過補(bǔ)償器PI1得到放大誤差信號(hào)vc1,vc1與斜坡信號(hào)vramp1相加得到斜坡補(bǔ)償后的放大誤差信號(hào)ve1;Rs1i1與ve1通過比較器CM1比較,其結(jié)果和時(shí)鐘信號(hào)clk 分別輸入觸發(fā)器RS1的S 端和R 端;RS1的Q 端輸出控制信號(hào)Vg1,以控制開關(guān)管S1的導(dǎo)通與關(guān)斷.
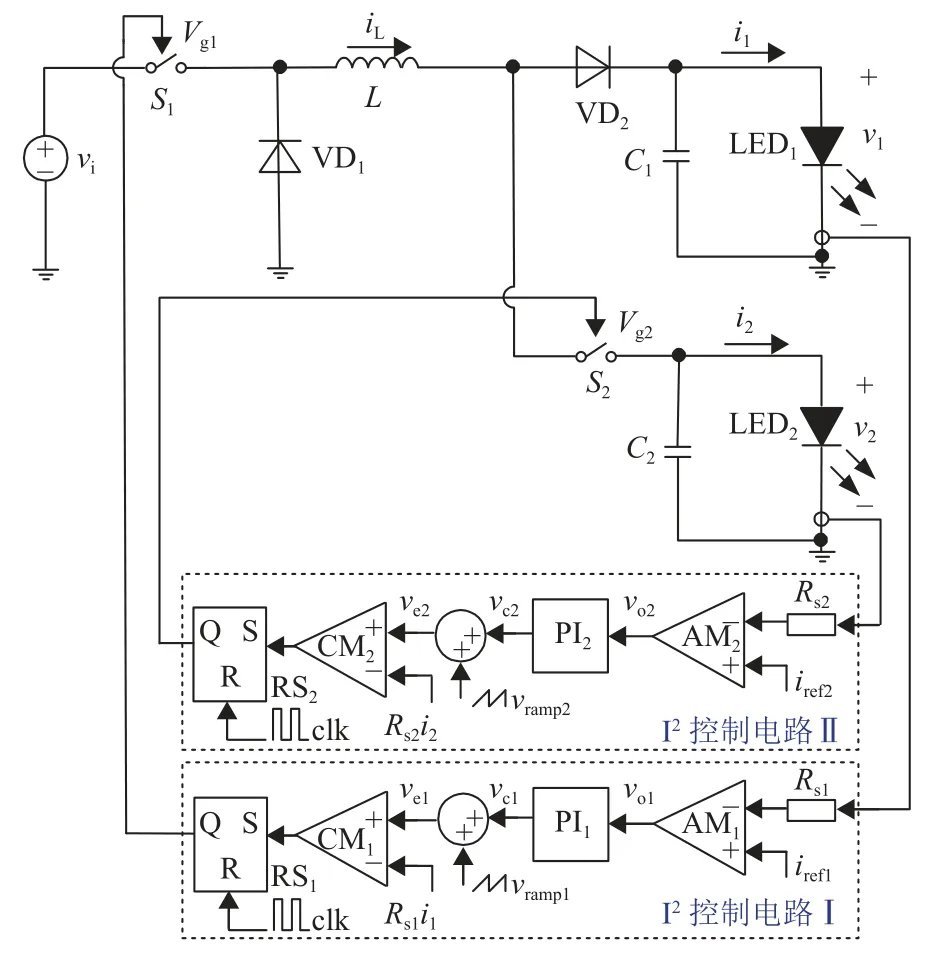
圖4 I2 控制SIDO Buck LED 驅(qū)動(dòng)電源原理Fig.4 Principle of I2-controlled SIDO Buck LED driver
同理,在I2控制電路Ⅱ中,輸出電流i2流過采樣電阻Rs2,測(cè)取采樣電阻Rs2兩端電壓Rs2i2獲取采樣后的輸出電流;Rs2i2通過誤差放大器AM2與參考信號(hào)iref2做差后得到信號(hào)vo2;vo2通過補(bǔ)償器PI2得到放大誤差信號(hào)vc2,vc2再與斜坡信號(hào)vramp2相加得到斜坡補(bǔ)償后的放大誤差信號(hào)ve2;Rs2i2與ve2通過比較器CM2比較,比較結(jié)果和時(shí)鐘信號(hào)clk 分別輸入觸發(fā)器RS2的S 端和R 端;觸發(fā)器RS2的Q 端輸出控制信號(hào)Vg2,以控制開關(guān)管S2的導(dǎo)通與關(guān)斷.
圖5 所示為I2控制SIDO Buck LED 驅(qū)動(dòng)電源的控制時(shí)序,開關(guān)周期T開始時(shí)刻,Rs1i1<ve1,比較器CM1輸出高電平,觸發(fā)器RS1置位,Vg1為高電平,開關(guān)管S1導(dǎo)通;同時(shí),Rs2i2<ve2,比較器CM2輸出高電平,觸發(fā)器RS2置位,Vg2為高電平,開關(guān)管S2導(dǎo)通;電感電流iL以斜率kL3上升,Rs1i1以斜率 -k2下降,Rs2i2以斜率k4上升.當(dāng)時(shí)鐘信號(hào)clk 到來,觸發(fā)器RS1、RS2復(fù)位,Vg1和Vg2為低電平,開關(guān)管S1、S2關(guān)斷,iL以斜率 -kL1下降,Rs1i1以斜率k1上升,Rs2i2以斜率 -k3下降.當(dāng)Rs2i2下降至ve2時(shí),比較器CM2輸出高電平,觸發(fā)器RS2置位,Vg2為高電平,開關(guān)管S2導(dǎo)通,開關(guān)管S1保持關(guān)斷,iL以斜率 -kL2繼續(xù)下降,Rs2i2以斜率k4上升,Rs1i1以斜率-k2下降;直至Rs1i1下降至ve1,電路進(jìn)入下一個(gè)開關(guān)周期.
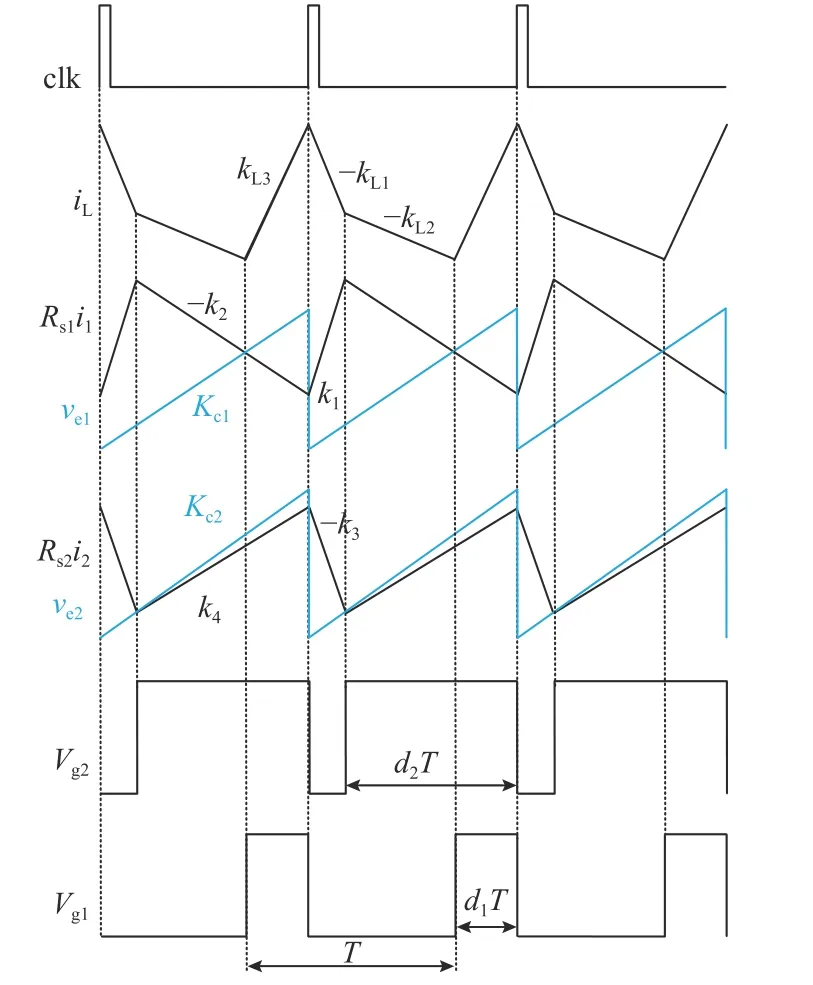
圖5 I2 控制SIDO Buck LED 驅(qū)動(dòng)電源的控制時(shí)序Fig.5 Control timing of I2-controlled SIDO Buck LED driver
電感電流斜率kL1、kL2、kL3分別為
2.2 小信號(hào)模型
由圖4 可得放大誤差信號(hào)vc1、vc2分別為
式中:kp1、kp2分別為補(bǔ)償器PI1、PI2的比例系數(shù);ki1、ki2分別為補(bǔ)償器PI1、PI2的積分系數(shù);t為時(shí)間.
由圖5 中iL的紋波波形可得
由圖5 中Rs1i1、Rs2i2的紋波波形可得
式中:Kc1、Kc2分別為斜坡補(bǔ)償后的放大誤差信號(hào)ve1、ve2的斜率,分別與斜坡信號(hào)vramp1、vramp2的斜率一致.
對(duì)式(10)、(11)中的變量施加小信號(hào)擾動(dòng)量,并進(jìn)行拉氏變換,得到d1、d2的小信號(hào)擾動(dòng)量分別為
其中:I1、Vc1分別為i1、vc1的直流穩(wěn)態(tài)量.
3 交叉影響分析
3.1 交叉影響傳遞函數(shù)
根據(jù)式(3)、(12)、(13)和文獻(xiàn)[5]可得,I2控制、電壓控制的SIDO Buck LED 驅(qū)動(dòng)電源2 條輸出支路的交叉影響傳遞函數(shù)Z1i(s)、Z2i(s)、Z1u(s)、Z2u(s)分別如式(14)~(17)所示.其中,下標(biāo)數(shù)字1(2)表示LED1(LED2)輸出支路對(duì)LED2(LED1)輸出支路的交叉影響,下標(biāo)字母i、u 分別表示I2控制、電壓控制.
3.2 交叉影響傳遞函數(shù)Bode 圖
根據(jù)表1 電路參數(shù)和式(14)~(17),得到Z1i(s)、Z2i(s)、Z1u(s)和Z2u(s)的Bode 圖如圖6 所示.交叉影響屬于低頻波動(dòng)特性,所以,其低頻增益幅值大小反映交叉影響大小.低頻增益幅值越小,交叉影響越小;低頻增益幅值越大,交叉影響越大[7].
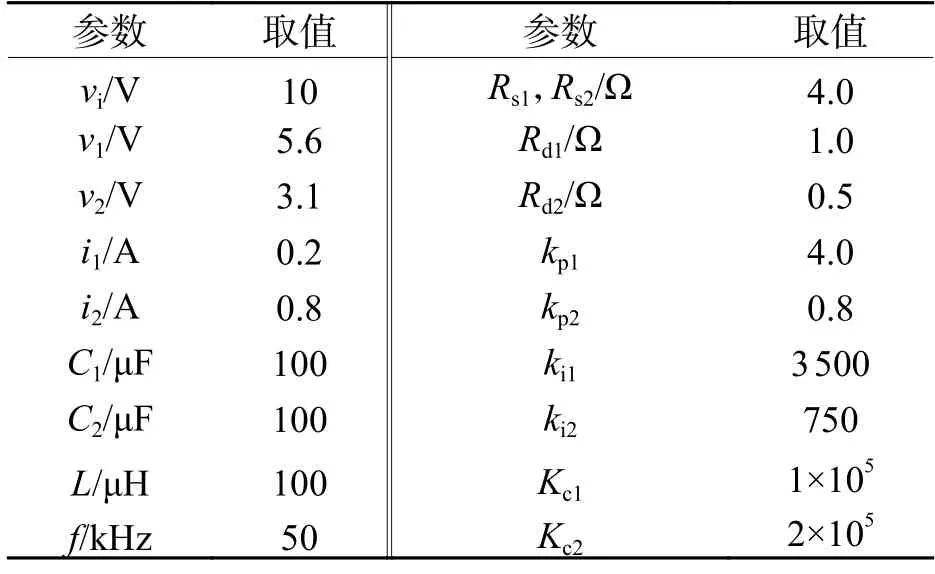
表1 I2 控制SIDO Buck LED 驅(qū)動(dòng)電源電路參數(shù)Tab.1 Circuit parameters of I2-controlled SIDO Buck LED driver
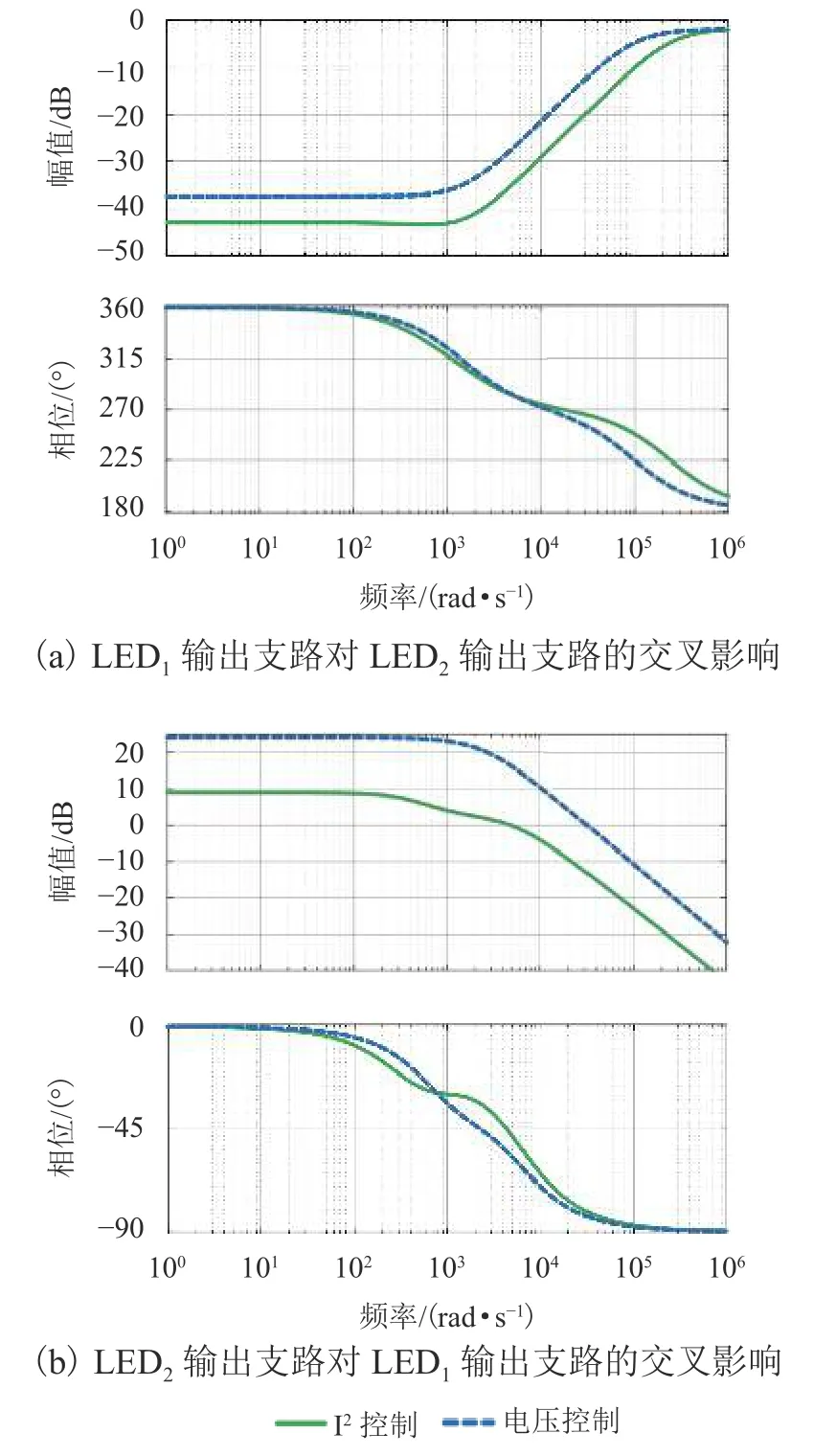
圖6 交叉影響傳遞函數(shù)Bode 圖Fig.6 Bode plots of cross regulation transfer function
從圖6(a)、(b)可以看出,與Z1u(s)和Z2u(s)相比,Z1i(s)和Z2i(s)幅頻曲線的低頻增益均更小.說明相比于電壓控制,I2控制SIDO Buck LED 驅(qū)動(dòng)電源的輸出支路間的交叉影響更小.
4 實(shí)驗(yàn)驗(yàn)證
為驗(yàn)證理論分析的正確性,設(shè)計(jì)如圖7 所示的I2控制SIDO Buck LED 驅(qū)動(dòng)電源實(shí)驗(yàn)電路,參數(shù)如表1 所示,實(shí)驗(yàn)波形如圖8、9 所示.
圖7 I2 控制SIDO Buck LED 驅(qū)動(dòng)電源實(shí)驗(yàn)電路Fig.7 Experimental circuit of I2-controlled SIDO Buck LED driver

圖8 iref1 突變,輸出電流實(shí)驗(yàn)波形Fig.8 Experiment waveforms of output current with various iref1
圖8(a)為輸出電流i2=0.8 A,iref1=1.6 V→0.8 V(i1=0.4 A→0.2 A)時(shí),LED1輸出支路對(duì)LED2輸出支路的交叉影響實(shí)驗(yàn)結(jié)果;圖8(b)為輸出電流i2=0.8 A,iref1=2.4 V→1.2 V(i1=0.6 A→0.3 A)時(shí),LED1輸出支路對(duì)LED2輸出支路的交叉影響實(shí)驗(yàn)結(jié)果.由圖8(a)可知,電壓控制和I2控制SIDO Buck LED驅(qū)動(dòng)電源LED1輸出支路對(duì)LED2輸出支路的交叉影響分別為0.250 A 和0.090 A.由圖8(b)可知,電壓控制和I2控制SIDO Buck LED 驅(qū)動(dòng)電源LED1輸出支路對(duì)LED2輸出支路的交叉影響分別為0.365 A 和0.115 A.由此說明,參考信號(hào)iref1突變時(shí),I2控制SIDO Buck LED 驅(qū)動(dòng)電源相比于電壓控制SIDO Buck LED 驅(qū)動(dòng)電源,減小了LED1輸出支路對(duì)LED2輸出支路的交叉影響.
圖9(a)為輸出電流i1=0.2 A,iref2=3.2 V→1.6 V(i2=0.8 A→0.4 A)時(shí),LED2輸出支路對(duì)LED1輸出支路的交叉影響實(shí)驗(yàn)結(jié)果;圖9(b)為輸出電流i1=0.2 A,iref2=2.4 V→1.2 V(i2=0.6 A→0.3 A)時(shí),LED2輸出支路對(duì)LED1輸出支路的交叉影響實(shí)驗(yàn)結(jié)果.由圖9(a)可知,電壓控制和I2控制SIDO Buck LED驅(qū)動(dòng)電源LED2輸出支路對(duì)LED1輸出支路的交叉影響分別為0.060 A 和0.030 A.由圖9(b)可知,電壓控制和I2控制SIDO Buck LED 驅(qū)動(dòng)電源LED2輸出支路對(duì)LED1輸出支路的交叉影響分別為0.04 A和0.015 A.圖9 表明,參考信號(hào)iref2突變時(shí),I2控制SIDO Buck LED 驅(qū)動(dòng)電源相比于電壓控制SIDO Buck LED 驅(qū)動(dòng)電源,減小了LED2輸出支路對(duì)LED1輸出支路的交叉影響.
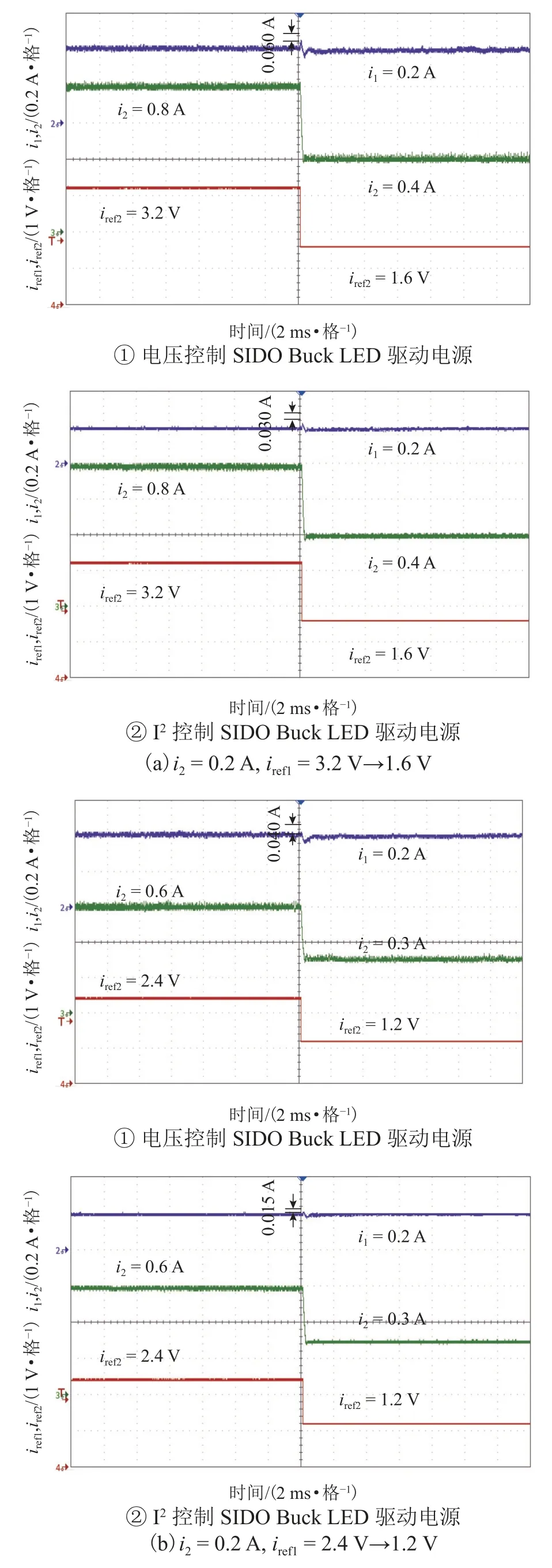
圖9 iref2 突變,輸出電流實(shí)驗(yàn)波形Fig.9 Experiment waveforms of output current with various iref2
綜上,電壓控制和I2控制SIDO Buck LED 驅(qū)動(dòng)電源的交叉影響實(shí)驗(yàn)對(duì)比結(jié)果如表2 所示.相比于電壓控制SIDO Buck LED 驅(qū)動(dòng)電源,I2控制SIDO Buck LED 驅(qū)動(dòng)電源改善了2 條輸出支路間的交叉影響,驗(yàn)證了理論分析的正確性.
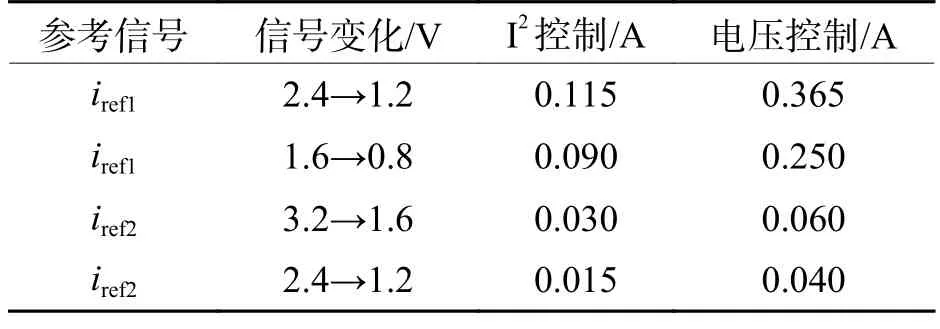
表2 交叉影響實(shí)驗(yàn)對(duì)比結(jié)果Tab.2 Experimental results of cross regulation
5 結(jié)論
本文在描述SIDO Buck LED 驅(qū)動(dòng)電源工作原理的基礎(chǔ)上,采用狀態(tài)空間平均法,建立其狀態(tài)空間平均模型;提出了能夠減小輸出支路間交叉影響的I2控制SIDO Buck LED 驅(qū)動(dòng)電源,詳細(xì)分析電路結(jié)構(gòu)和工作原理,推導(dǎo)了交叉影響傳遞函數(shù);基于交叉影響傳遞函數(shù)Bode 圖,對(duì)比分析了I2控制和電壓控制SIDO Buck LED 驅(qū)動(dòng)電源輸出支路間的交叉影響.理論和實(shí)驗(yàn)研究結(jié)果表明:相比于電壓控制SIDO Buck LED 驅(qū)動(dòng)電源,本文提出的I2控制SIDO Buck LED 驅(qū)動(dòng)電源能夠有效減小輸出支路間的交叉影響.此外,本文的建模方法和研究成果可拓展至其他SIMO DC-DC LED 驅(qū)動(dòng)電源.
猜你喜歡
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2022年3期)2022-03-16 05:55:08
鴨綠江(2021年35期)2021-04-19 12:24:18
當(dāng)代陜西(2021年2期)2021-03-29 07:41:24
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(shù)(2016年3期)2016-03-26 07:13:38
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00