面向微細加工的二自由度磁懸浮平臺
2023-12-21 09:43:36魏發(fā)南
西南交通大學(xué)學(xué)報 2023年6期
關(guān)鍵詞:方向
魏發(fā)南,劉 英
(福州大學(xué)先進制造學(xué)院,福建 晉江 362200)
微細加工技術(shù)是一種制造微小尺寸零件的加工技術(shù),其加工平臺具有毫米級別的行程和微米級別及以下的定位精度[1].激光微細加工以無機械沖力、加工對象局限性小的特點而被廣泛研究.為提升工件的加工精度,研究更多集中在如何減少加工表面熱損傷.文獻[2-4]采用高頻的脈沖激光(如納秒激光、飛秒激光、皮秒激光)實現(xiàn)高精度加工,激光的脈沖頻率越高,則越能對材料實現(xiàn)幾乎無熱效應(yīng)的加工.文獻[5]采用水輔助激光加工技術(shù),通過水層帶走加工過程中的熱量和碎屑來縮小熱影響區(qū).然而,除卻表面熱效應(yīng)的影響,移動臺的定位精度也與工件的加工精度有直接影響.激光微細加工移動臺通常采用步進電機進行驅(qū)動,在傳動過程中不可避免存在機械摩擦,影響定位精度.磁懸浮作為一種磁力克服重力的技術(shù),因其無接觸的特性很好地避免了部件之間的直接接觸與摩擦損耗,在交通運輸、軸承、高精密數(shù)控機床等領(lǐng)域得到廣泛的研究[6-10].將磁懸浮的無接觸摩擦特性運用于激光微細加工移動臺,為進一步提升加工精度提供了可能性.
在磁懸浮定位平臺的研究中,文獻[11]提出一種二維磁懸浮定位平臺,由6 對電磁鐵實現(xiàn)懸浮支撐與平面運動.文獻[12]采用電磁鐵實現(xiàn)懸浮控制、直線電機進行驅(qū)動的方式,構(gòu)建多自由度的磁懸浮平臺.文獻[13-14]考慮多個線圈組合排列,共同驅(qū)動永磁體載體實現(xiàn)六自由度的運動.以上研究中,因電磁鐵或線圈陣列均承載著平臺懸浮的功能,平臺面臨著能耗與溫升問題.永磁體因其低能耗的固有屬性而被廣泛研究.文獻[15]提出一種完全永磁懸浮裝置,通過改變盤狀永磁體的旋轉(zhuǎn)角度調(diào)整磁通量,從而改變懸浮力大小,可實現(xiàn)零功率懸浮控制.文獻[16]提出間隔分布的方形永磁體作為定子,驅(qū)動器為線圈陣列的永磁平面電機.文獻[17]提出由4 組線性哈爾巴赫陣列作為定子以及對應(yīng)的二相線圈繞組為驅(qū)動器的磁懸浮平臺.在上述磁懸浮平臺中,永磁體陣列或者哈爾巴赫陣列替代電磁鐵或者電磁線圈提供懸浮力,有效避免懸浮控制所需的能耗.但由于永磁體陣列或者哈爾巴赫陣列既提供懸浮力,也提供驅(qū)動力,不可避免地存在耦合的問題.解耦問題往往是磁懸浮系統(tǒng)性能優(yōu)化的關(guān)鍵,也是重難點問題,因此,研究人員在模型優(yōu)化和控制算法上進行了許多嘗試與探索[17-22].
本文提出一種新型磁懸浮平臺運用于激光微細加工裝置中.在該平臺中,永磁斥力抵消重力,從而可忽略垂直方向的運動控制,電磁線圈用來實現(xiàn)水平方向的驅(qū)動.由此,不僅可以避免懸浮力與水平驅(qū)動力的耦合,也消除了因電磁力平衡重力而產(chǎn)生的功耗和熱量.同時針對該磁懸浮平臺,采用分散控制策略,設(shè)計對動態(tài)響應(yīng)過程具有一定魯棒性的模糊PD(proportional-derivative)控制器,結(jié)果表明,該磁懸浮平臺具備毫米級的平面運動行程以及微米級的定位精度.本文安排如下:首先,介紹磁懸浮定位平臺的結(jié)構(gòu)及其工作原理;其次,基于文獻[23]進行平臺的數(shù)學(xué)建模并建立動力學(xué)方程,以此進行控制器的設(shè)計,考慮平臺多點懸浮支撐的結(jié)構(gòu)特性,采用分散控制[24]降低控制器的設(shè)計難度,同時設(shè)計可實時修正PD 參數(shù)的模糊PD 控制器;最后,搭建實驗平臺進行實驗驗證.
1 磁懸浮定位平臺
1.1 系統(tǒng)結(jié)構(gòu)與工作原理
磁懸浮定位平臺三維模型結(jié)構(gòu)如圖1 所示,由3 組定子基座、3 個圓柱永磁體、載物平臺構(gòu)成.定子基座包括線圈陣列、線性霍爾傳感器、環(huán)形永磁體.定子基座中的線圈陣列(共4 個)位于環(huán)形永磁體上方,線圈繞圓環(huán)永磁體的中心軸線陣列分布,兩兩組合提供沿著x、y方向的水平電磁力.線性霍爾傳感器位于線圈陣列的中心軸線處,高度位于線圈高度的一半處,用于測量圓柱永磁體沿x、y方向移動時的磁場變化.定子基座之間相互間隔120° 呈圓周分布,定子基座的中心距原點的距離為100 mm.最下方的圓形底座的半徑尺寸設(shè)計為170 mm,便于固定3 個環(huán)形永磁體.圓柱永磁體固定在載物平臺上,與載物平臺共同構(gòu)成移動臺.將一組定子基座和圓柱永磁體定義為一組子單元,3 組子單元具有一致的物理參數(shù).每組子單元中,圓環(huán)永磁體剩磁0.23 T,內(nèi)、外徑分別為60、100 mm,高度15 mm;圓柱永磁體2 個,剩磁1.03 T,直徑40 mm,高度5 mm;線圈內(nèi)、外徑分別為7、25 mm,電感4.28 mH,電感5.5 Ω.
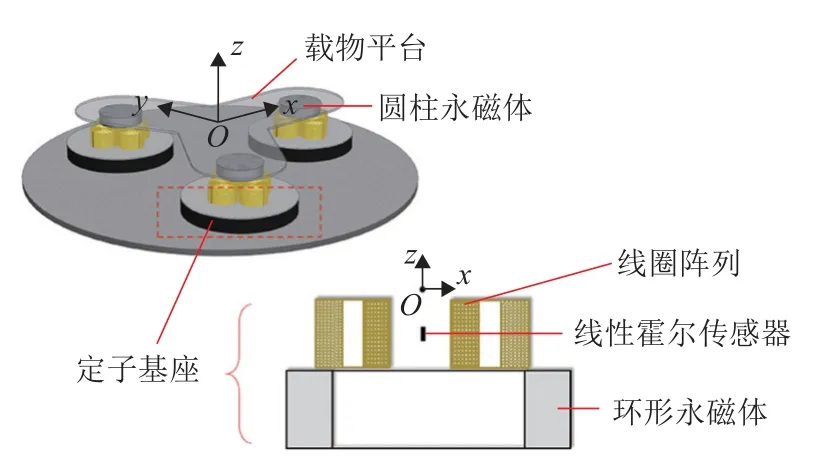
圖1 磁懸浮平臺三維模型Fig.1 Three-dimensional model of maglev platform
本文的磁懸浮平臺中兩兩線圈組合提供一組電磁力,共提供6 組電磁力.現(xiàn)通過有限元仿真方式[23]對其中一組圓柱永磁體與線圈間的相互作用力進行分析,建立圖2 所示坐標系.電磁力的磁力大小與線圈電流成比例關(guān)系,取線圈電流為1 A,作歸一化處理.圖2 為圓柱永磁體在固定高度下,沿x方向移動一定距離后再往y方向偏移0、1、2、3 mm 時圓柱永磁體所受電磁力大小.圖2(a)表明,在x≤ 3 mm,y≤3 mm,圓柱永磁體往y方向偏移時,電磁力在x方向的分量變化微小,最大變化量發(fā)生在x=0,y=3 mm處,其值為0.010 N,變化幅度為1.5%;電磁力在y方向的分量隨著偏移距離越遠,其值增加,最大僅為0.008 N,為x方向電磁力分量的1.4%.圖2(b)表明,在x≤ 3 mm,y≤ 3 mm,圓柱永磁體往y方向偏移時,電磁力在z方向的分量變化微小,最大變化量發(fā)生在x=2 mm,y=3 mm 處,其值為0.010 N,變化幅度為0.7%.由此可認為,由兩兩線圈組成的結(jié)構(gòu)中,在固定高度以及3 mm×3 mm 平面范圍內(nèi),電磁力的大小與在y方向的位置無關(guān),僅與在x方向的位置以及電流大小相關(guān);假設(shè)電磁力在y方向的微小分量為外部擾動.由此線圈僅產(chǎn)生沿兩線圈中心連線方向的電磁力分量以及豎直向上的分量.

圖2 不同偏移距離下電磁力在x、y、z 方向的分量Fig.2 Components of electromagnetic force in x,y,and z directions at different offset distances
對平臺能否實現(xiàn)一定平面范圍內(nèi)穩(wěn)定的懸浮高度,進行了以下探究.在重力與永磁斥力平衡的高度處,動子沿平面內(nèi)移動,令豎直方向上所受電磁力與永磁斥力之和的變化量與動子的重力之比為k.若k<0.1,且在該水平范圍內(nèi),懸浮高度變化微小,即可認為在此水平范圍內(nèi)動子在豎直方向上合力為0,可忽略垂直方向上的控制[23].對本文所述的子單元結(jié)構(gòu)進行分析,圖3 為圓柱永磁體沿x、y方向移動,電磁力與永磁斥力之和在豎直方向上分量的變化情況以及對應(yīng)k值變化.由圖3 可知,本文所述的結(jié)構(gòu)在 ±2 mm 內(nèi),k值始終在10%以內(nèi),永磁斥力與電磁力在豎直方向上變化量最大為0.017 N,懸浮高度變化不到0.2 mm,因此,可認為平臺結(jié)構(gòu)在4 mm ×4 mm 的平面范圍內(nèi)只需考慮x、y方向的運動控制,而忽略垂直方向上的控制.
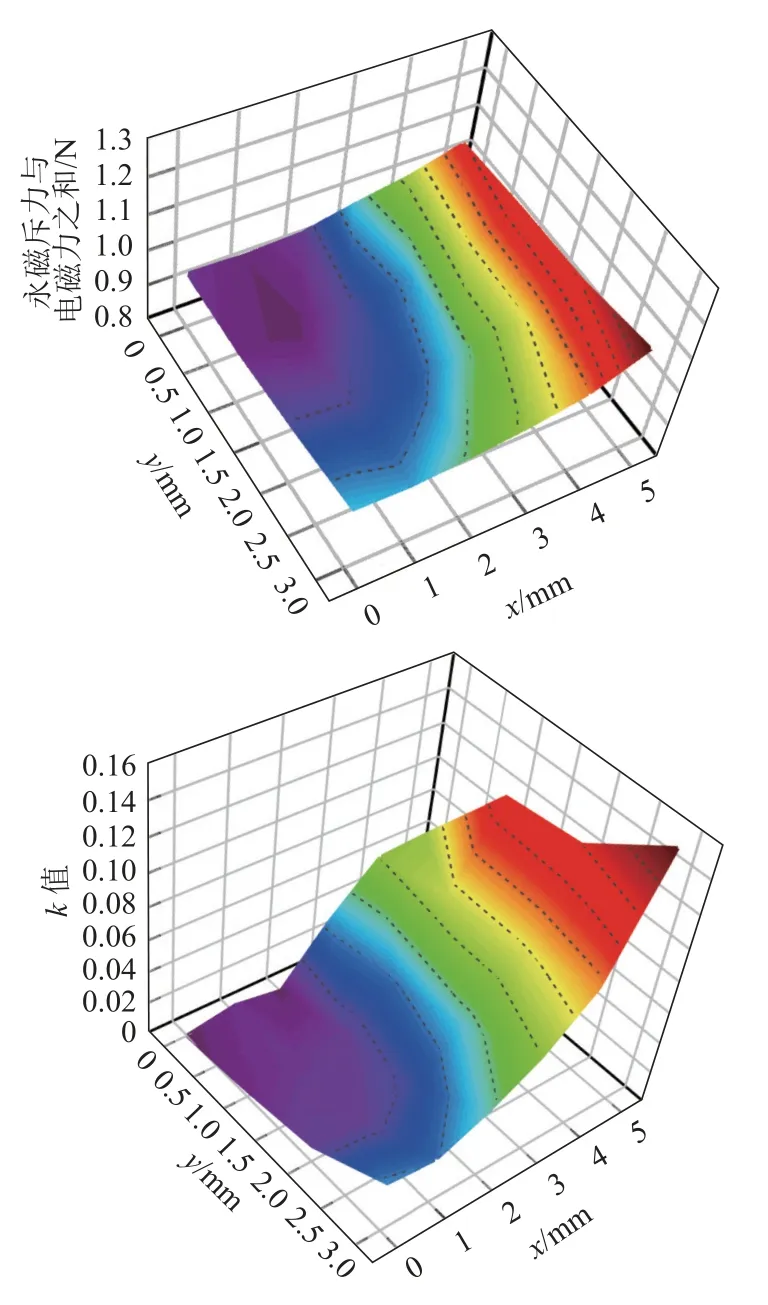
圖3 豎直方向上的電磁力與永磁斥力之和以及k 值Fig.3 Sum of electromagnetic force and permanent magnet repulsion in vertical direction and k value
磁懸浮平臺的3 組子單元中環(huán)形永磁體對移動臺產(chǎn)生一致的、豎直向上的排斥力,排斥力之和用于抵消移動臺部分重力.子單元中同一軸線方向的兩個線圈反向串聯(lián)產(chǎn)生一組電磁力,3 組子單元的水平方向的電磁力總和與環(huán)形永磁體產(chǎn)生的被動偏移力共同驅(qū)動移動臺在平面內(nèi)移動.
2 系統(tǒng)動力學(xué)模型
圖4 為磁懸浮平臺的受力分析簡圖,原點O設(shè)在載物平臺的質(zhì)心位置處,建立全局坐標系,并確定3 組子單元的序號,按逆時針排序為1、2、3.令圓環(huán)永磁體對圓柱永磁體的作用力為Fm,兩兩組合的線圈對圓柱永磁體作用力為Fe,圓柱永磁體與載物平臺的質(zhì)量之和為m.將圓柱永磁體統(tǒng)稱為動子.將Fm在x、y、z方向上分別分解為Fmx、Fmy、Fmz.令i=1,2,3,依次表示3 個子單元,則第i組子單元在x、y、z方向上的永磁斥力為Fmxi、Fmyi、Fmzi,對應(yīng)電磁力為Fexi、Feyi、Fezi.平面內(nèi)系統(tǒng)的動力學(xué)方程為
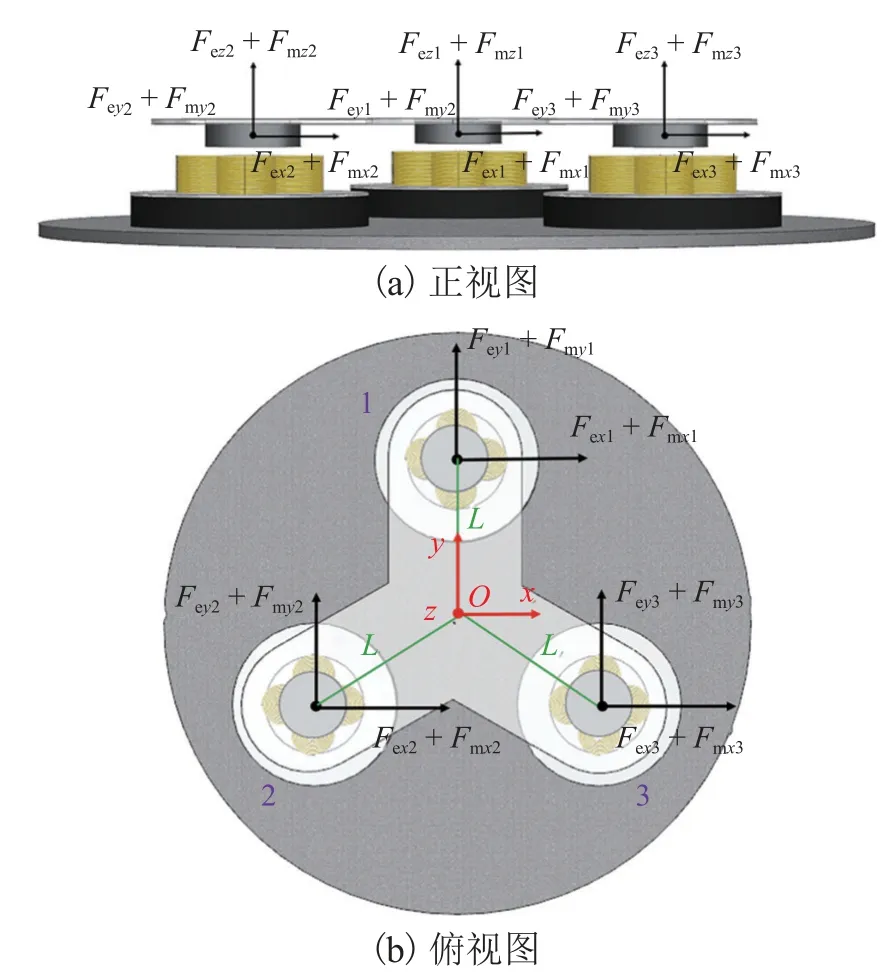
圖4 磁懸浮平臺的受力分析Fig.4 Force analysis of maglev platform
式中:θ 為磁懸浮平臺繞z軸旋轉(zhuǎn)的角度;J為轉(zhuǎn)動慣量;fx、fy分別為x、y方向上的外界干擾力;φi為單元i動子質(zhì)心和原點的連線與x軸正方向按順時針所形成的夾角;L=100 mm,為各子單元中動子的質(zhì)心到全局坐標系原點的水平距離;M為外界干擾力矩.
本文的磁懸浮實物平臺設(shè)計中各個子單元具有一致的幾何參數(shù)和幾乎一致的磁場特性,可認為各個子單元具有一致的數(shù)學(xué)模型.以其中一個單元中圓柱永磁體在x方向為例,通過COMSOL Multiphysics?得到永磁體和電磁線圈的有限元仿真模型,通過多項式擬合獲得磁力公式,由此得到的偏移力Fmx1和電磁力Fex1分別為
同理,在y方向的偏移力Fmy1和電磁力Fey1分別為
式(4)~(7)中:kmi為單元i中動子的被動偏移力剛度系數(shù),kei為單元i中動子的電磁力剛度系數(shù),kIi為單元i中動子的電流剛度系數(shù),I1、I2分別為單元1在x、y方向線圈所通的電流.
通過多項式擬合,偏移力和電磁力的各項系數(shù)以及擬合程度如表1 所示,其中,偏移力和電磁力的擬合度分別為0.998 7、0.994 1.

表1 擬合后的各項系數(shù)Tab.1 Various coefficients after fitting
因本文僅探究平面內(nèi)的平移運動,暫未考慮平臺繞z軸旋轉(zhuǎn)的問題.將式(4)~(7)代入式(1)、(2)中,得到系統(tǒng)的動力學(xué)方程為
式中:I3、I4分別為單元2 在x、y方向的線圈所通的電流,I5、I6分別為單元3 在x、y方向的線圈所通的電流.
在結(jié)構(gòu)設(shè)計中,放置6 個霍爾傳感器檢測3 個單元分別在x、y方向的運動,所測量的位移變化量(x1,y1)、(x2,y2)、(x3,y3)分別為
3 控制器設(shè)計
由于磁懸浮系統(tǒng)具有開環(huán)非線性的特點,需要設(shè)計反饋控制以達到穩(wěn)定的狀態(tài).分散控制可忽略各個單元之間的耦合關(guān)系,獨立控制各個單元,使得控制器具有設(shè)計簡單、易于實現(xiàn)的優(yōu)點,該策略在工程實際中運用廣泛[24-25].模糊PID 控制運用模糊語言與專家知識,可在線對PID 參數(shù)進行適應(yīng)性調(diào)整,具有一定柔性,在動態(tài)響應(yīng)過程中具有良好的魯棒性.磁懸浮平臺基于多點支撐懸浮驅(qū)動的結(jié)構(gòu)特性,采取分散控制策略,且磁懸浮平臺系統(tǒng)為滯后系統(tǒng),因此,選用具有超前補償?shù)腜D 控制算法與模糊控制相結(jié)合,實現(xiàn)平臺運動過程中的穩(wěn)定調(diào)節(jié).本文基于分散控制策略對3 組子單元的x、y方向均采取獨立的模糊PD 控制算法.因本文僅探究了平面內(nèi)的平移運動,3 組子單元給予相同的參考信號實現(xiàn)平臺整體移動,因此,3 組子單元具有一致的調(diào)節(jié)過程.下面以單元1 為例進行模糊PD 控制器的設(shè)計以及描述其控制過程.
3.1 模糊PD 控制器設(shè)計
以單元1 中的x方向為例,PD 控制器的傳遞函數(shù)G(s) 為
式中:E(s) 為輸入控制器中的偏差量,U(s)為控制器的輸出量,P為比例系數(shù),D為微分系數(shù),s為復(fù)頻率.
模糊控制流程如圖5 所示.將動子位移的偏差量E與偏差變化量Ec為模糊控制器的2 個輸入,選用三角隸屬度函數(shù)對輸入量和輸出量進行模糊化處理,模糊量的子集選用 {NB(負大),NM(負中),NS(負小),ZO(零),PS(正小),PM(正中),PB(正大)},根據(jù)由實踐經(jīng)驗和專家知識組成的知識庫進行模糊規(guī)則推理,輸出模糊量,采用重心法對輸出量進行解模糊處理,輸出參數(shù)P、D經(jīng)模糊控制器輸出的變化量 ΔKp、ΔKd,如式(11)、(12)所示.
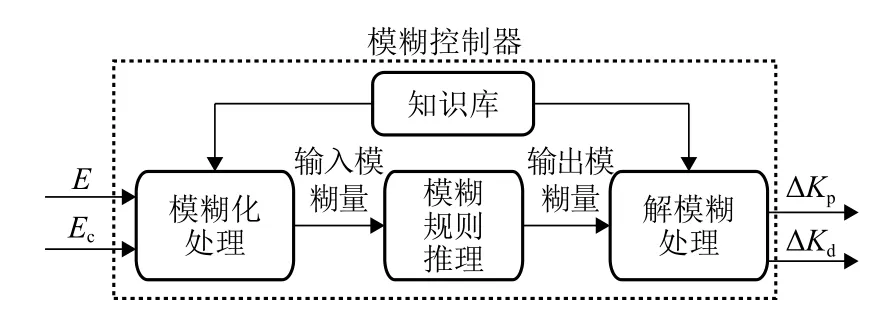
圖5 模糊控制器流程Fig.5 Flow chart of fuzzy controller
由于浮子位置變化范圍為4 mm,令E的基本論域為 [-2,2];在數(shù)字控制器中,Ec表現(xiàn)為當前偏差與上一次偏差的差值,令Ec的基本論域為 [-1,1];依據(jù)PD 控制環(huán)節(jié)的調(diào)試經(jīng)驗,設(shè)定 ΔKp和ΔKd的基本論域分別為[-0.01,0.01]、[-0.1,0.1];同時,結(jié)合前人經(jīng)驗以及實際控制經(jīng)驗確定模糊規(guī)則表.模糊控制器的量化因子、變量的基本論域、模糊論域、ΔKp和 ΔKd的模糊規(guī)則,見表2~4.
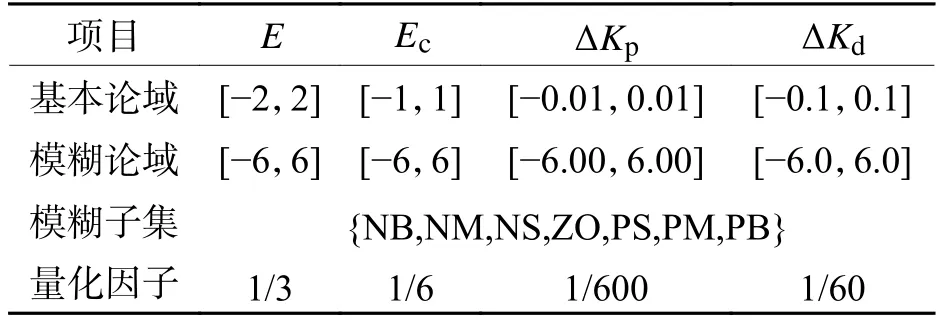
表2 模糊控制器參數(shù)Tab.2 Parameters of fuzzy controller
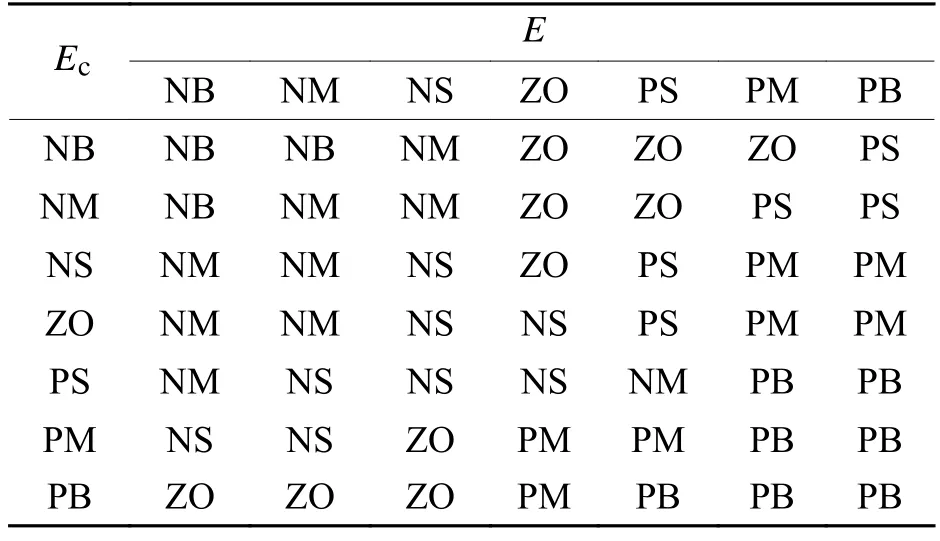
表3 Δ Kp 的模糊規(guī)則Tab.3 Fuzzy rule ofΔKp
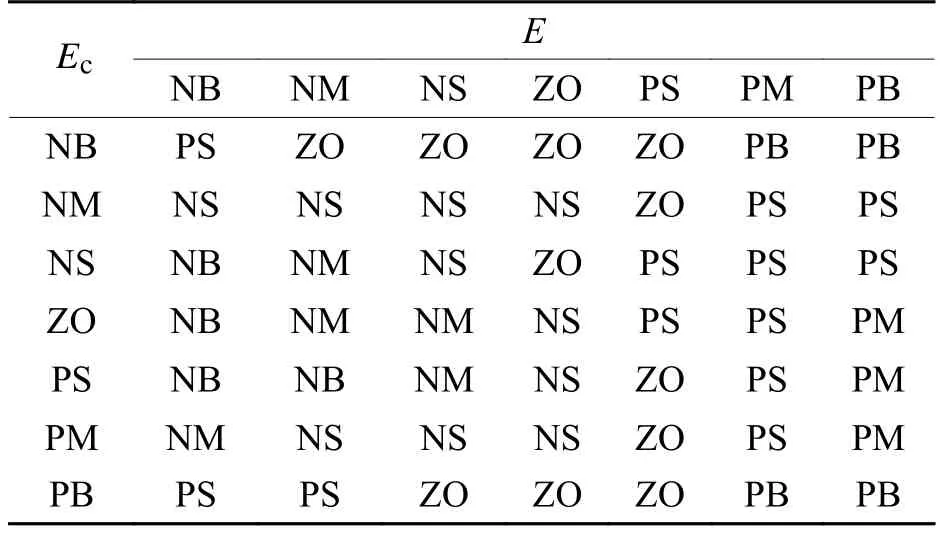
表4 ΔKd的模糊規(guī)則Tab.4 Fuzzy rule of ΔKd
本文由數(shù)字控制器實現(xiàn)3 組子單元的模數(shù)轉(zhuǎn)換、模糊PD 算法計算以及驅(qū)動電壓控制.單元1 系統(tǒng)控制過程如下:單元1 中線性霍爾傳感器檢測到由動子位移變化帶來的磁場信號變化,將其轉(zhuǎn)化成電壓信號,通過信號放大電路傳輸至控制單元的模數(shù)轉(zhuǎn)換模塊(AD 變換),得到信號值,與參考信號作比較后輸入控制單元,控制單元實時計算并輸出PWM(pulse width modulation),經(jīng)光耦隔離后傳輸至驅(qū)動電路,并輸出相應(yīng)的電壓,電壓信號傳輸至線圈兩端轉(zhuǎn)換成電流信號,由此線圈產(chǎn)生電磁力,與圓環(huán)永磁體產(chǎn)生的偏移力共同調(diào)整子單元中動子在水平面內(nèi)的移動.單元2、3 系統(tǒng)控制過程同上.單元1系統(tǒng)控制過程如圖6,圖中:U1為位移量x1經(jīng)傳感器輸出的電壓信號.

圖6 單元1 的x 方向控制框圖Fig.6 Control block diagram of unit 1 in x direction
4 實 驗
磁懸浮平臺整體架構(gòu)如圖7 所示,基于CortexTMM4 內(nèi)核的高性能微控制器STM32F407ZGT6 是控制系統(tǒng)的核心,接收由3 個子單元的線性霍爾傳感器SS495A 輸出的電壓信號,同時獨立輸出各單元的電壓控制信號.其中,線性霍爾傳感器的分辨率為3.125 mV/Gs,微控制器輸出位移信號的分辨率為2.85 μm.上位機實時監(jiān)測平臺的位移信號,示波器提供可視化的線圈電壓波動信號.
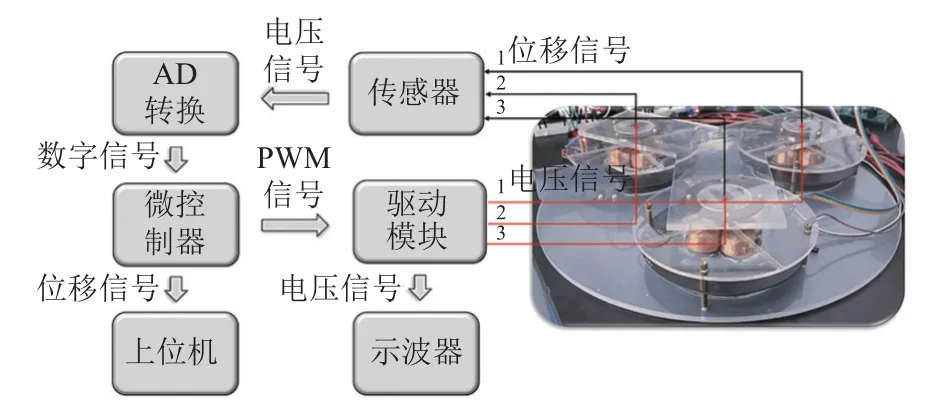
圖7 磁懸浮平臺的整體架構(gòu)Fig.7 Overall structure of maglev platform
本文僅探究磁懸浮平臺在平面內(nèi)的平移運動,所以在實驗中給予3 組子單元一致的位移參考信號.采用3 組子單元測量的位移量平均值表示平臺整體的位移.引入均方根誤差eRMSE(式(14))和最大跟蹤誤差量化磁懸浮平臺的控制效果.
式中:ej為第j個采樣點的實際測量值與參考值的偏差;N為采樣點的數(shù)量.
4.1 控制器比較
對磁懸浮系統(tǒng)分別采取PD 控制和模糊PD 控制,并進行x方向上0.5 mm 的階躍響應(yīng)以及幅值為0.5 mm 的余弦跟隨實驗.在PD 控制實驗環(huán)節(jié),對P、D參數(shù)進行多次調(diào)整,最后取3.0,以獲得較小的均方根誤差和穩(wěn)定的動態(tài)跟隨曲線.令PD 控制最終P、D參數(shù)與模糊PD 控制中初始P、D參數(shù)取值一致.圖8 為磁懸浮平臺在x方向上的階躍響應(yīng),其步長為0.5 mm.由圖可知:PD 控制階躍響應(yīng)具有明顯的超調(diào)現(xiàn)象,其超調(diào)量達到0.411 7 mm;而模糊PD 控制階躍響應(yīng)的超調(diào)量僅為0.093 1 mm,為前者的22.6%.
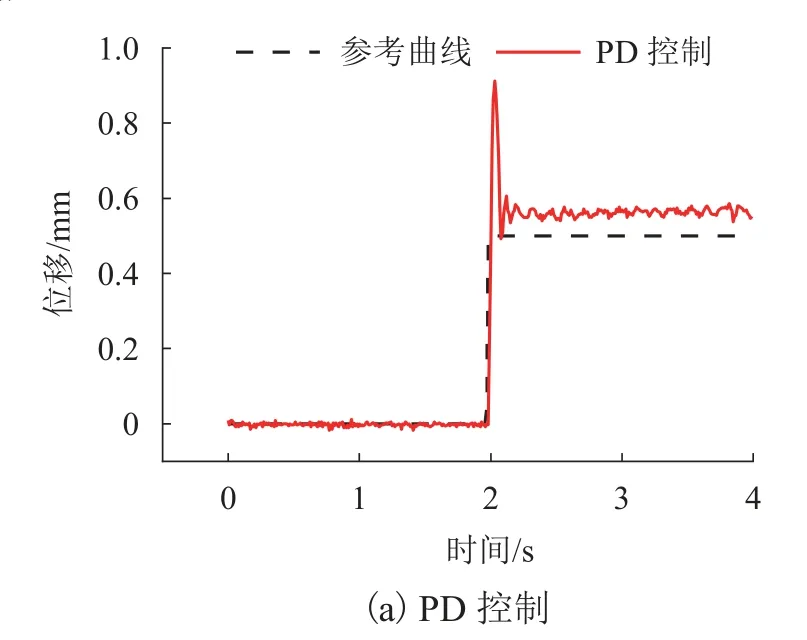
圖8 x 方向上的0.5 mm 階躍響應(yīng)曲線Fig.8 Step response curve of 0.5 mm in x direction
圖9 為磁懸浮平臺在x方向上2 個周期的余弦跟隨曲線,幅值為0.5 mm.由圖可知:模糊PD 控制相較于PD 控制具有更好的動態(tài)性能;PD 控制下的跟隨曲線均方根誤差為0.075 1 mm,最大跟蹤誤差為0.403 2 mm;而模糊PD 控制下的跟隨曲線均方根誤差為0.046 9 mm,最大跟蹤誤差僅為0.156 8 mm,是PD 控制下的38.8%.綜上可知,在相同的初始參數(shù)下,相較于PD 控制算法采用模糊PD 控制算法,能夠有效降低超調(diào)量,并且具有更優(yōu)的動態(tài)調(diào)節(jié)性能.

圖9 x 方向上的余弦跟隨曲線Fig.9 Sinusoidal following curve in x direction
4.2 懸浮實驗
在微控制器中給定3 組子單元一致的參考位置(x1,x2,x3,y1,y2,y3=0),隨后給系統(tǒng)上電,將平臺放置在定子基座上方,直至平臺實現(xiàn)懸浮.圖10 為放置平臺至穩(wěn)定懸浮的過程.
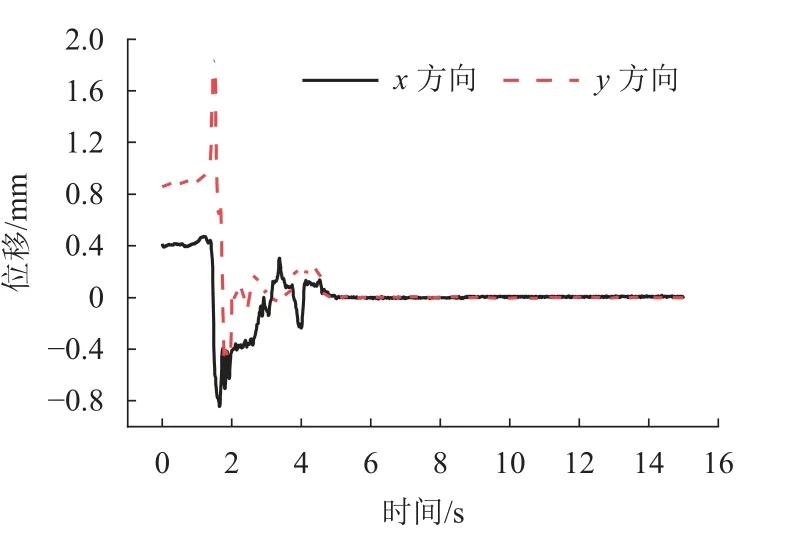
圖10 磁懸浮平臺在x、y 方向的靜態(tài)懸浮過程Fig.10 Static levitation process of maglev platform in x and y directions
圖10 表明:在5 s 后平臺趨于穩(wěn)定,并能夠維持長時間的穩(wěn)定狀態(tài);平臺在靜態(tài)懸浮狀態(tài)下,x、y方向的均方根誤差分別為7.19、2.95 μm,其最大跟蹤誤差分別為17、11 μm.由此可認為,該磁懸浮平臺具有良好的懸浮效果,能夠?qū)崿F(xiàn)微米級的懸浮精度.
4.3 步進響應(yīng)實驗
為驗證該磁懸浮平臺可實現(xiàn)大范圍的行程,對磁懸浮平臺進行0.028 5 mm 的小步長位移響應(yīng),如圖11 所示.
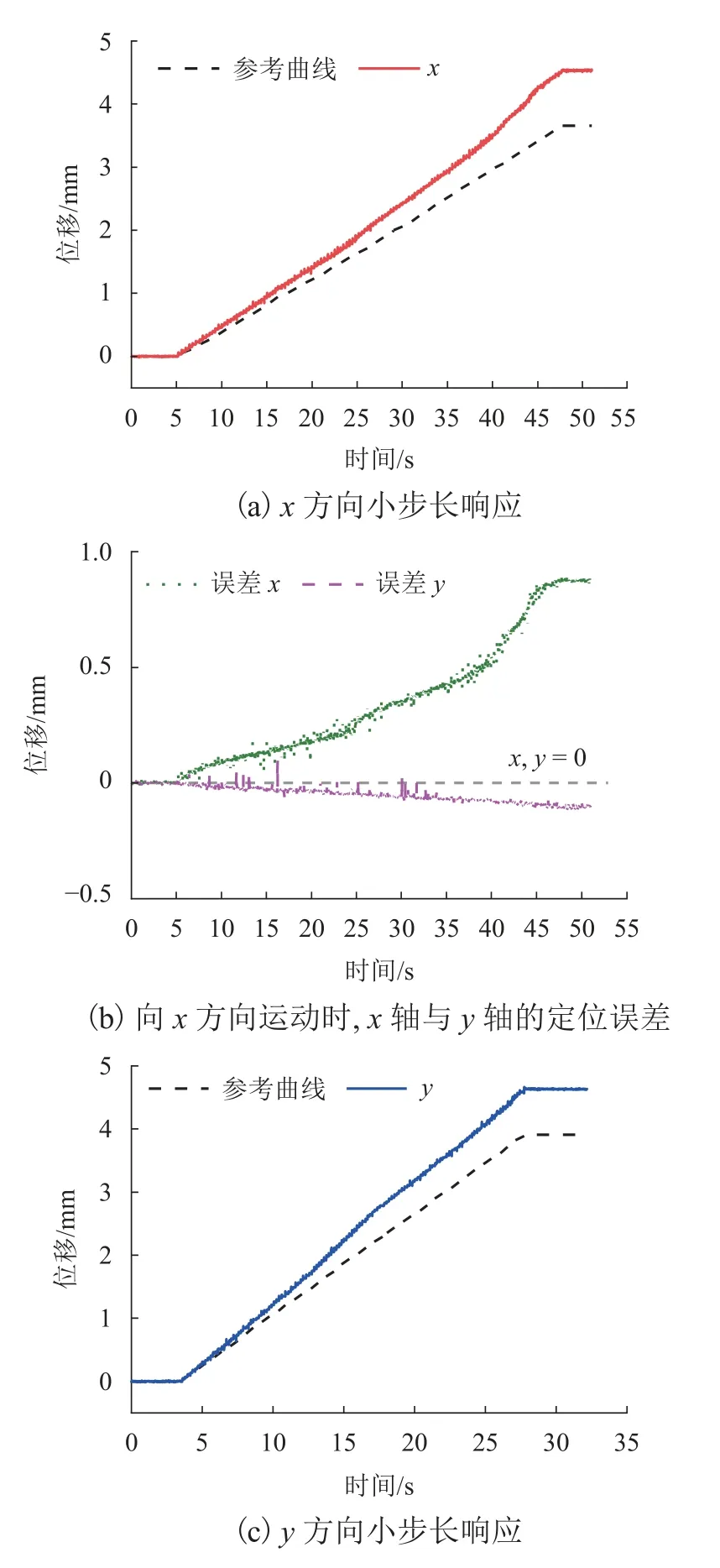
圖11 平臺小步長響應(yīng)曲線Fig.11 Small step response curves of platform
圖11 表明:x、y方向小步長響應(yīng)均能夠穩(wěn)定地跟隨參考曲線,且行程范圍分別為4.5 mm 和4.6 mm;隨著x方向的步進響應(yīng),y方向的最大跟蹤誤差不超過0.16 mm;隨著y方向的步進響應(yīng),x方向的最大跟蹤誤差也不超過0.16 mm,由此可認為,該磁懸浮平臺具備x與y方向解耦的能力.但不可避免的是,隨著參考位移的增加,實驗跟隨曲線的均方根誤差也在不斷增加.x方向的均方根誤差由0.004 9 mm 增加到0.874 8 mm,y方向的均方根誤差由0.006 1 mm 增加到0.721 0 mm,其原因在于控制環(huán)節(jié)缺少積分項而造成穩(wěn)態(tài)誤差不斷累積.
4.4 雙軸組合工作實驗
為驗證磁懸浮平臺具有x與y軸的組合工作能力,對磁懸浮平臺進行直徑為1 mm 圓形軌跡的運動響應(yīng),如圖12 所示.圖中:紅色圓點表示為直徑為1 mm 的圓形參考曲線,其中步進角度為60/π;藍色方框表示平臺的實驗跟隨曲線.圖13 為實驗跟隨過程中,實測值與參考值的誤差散點圖.實驗數(shù)據(jù)表明:圓形跟隨軌跡的均方根誤差為0.095 4 mm,最大跟蹤誤差為0.244 8 mm.因此,從實驗曲線上來看能夠?qū)崿F(xiàn)很好地跟隨,磁懸浮平臺具有一定的組合工作能力.
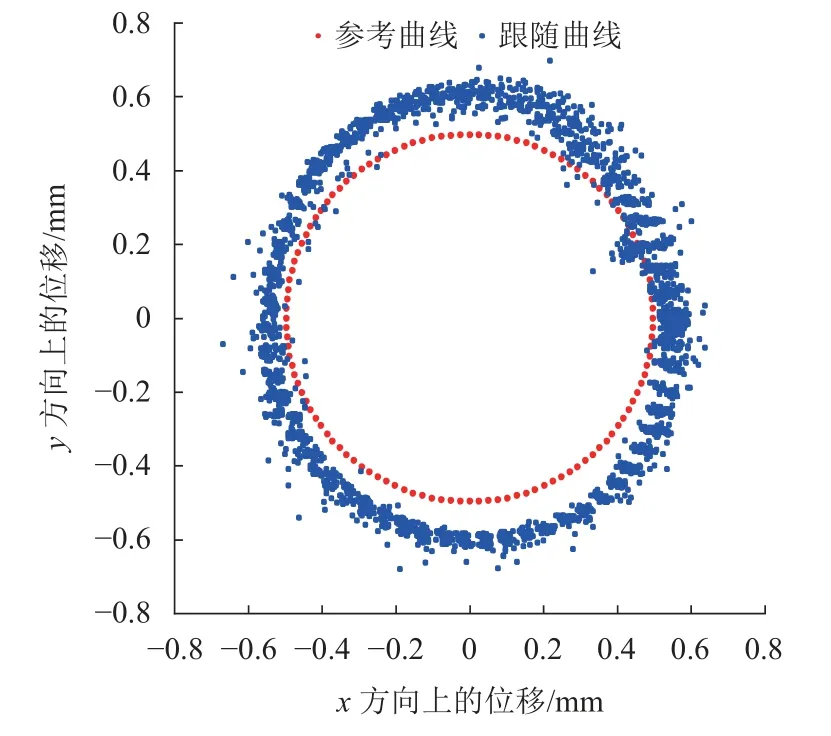
圖12 平臺進行直徑1 mm 的圓周運動Fig.12 Circular motion of platform within diameter of 1 mm

圖13 實測值與參考值的誤差分布Fig.13 Error distribution of measured and reference values
5 結(jié)論
本文介紹了所設(shè)計磁懸浮平臺的結(jié)構(gòu)和工作原理,并建立平面內(nèi)的系統(tǒng)動力學(xué)方程,進行模糊PD 控制器設(shè)計,最后設(shè)計實驗驗證平臺的靜態(tài)懸浮能力以及平面內(nèi)運動控制能力,得出以下結(jié)論:
1)針對激光微細加工的移動平臺存在機械摩擦問題,提出一種新型的二自由度混合斥力式磁懸浮平臺.在 ±2 mm 內(nèi),該平臺所受垂直方向的合力變化為0.017 N,懸浮高度變化在0.2 mm 內(nèi),因此,可近似認為該平臺垂直方向合力為0,可忽略垂直方向的運動控制,從而實現(xiàn)懸浮與驅(qū)動解耦.
2)基于平臺的多點懸浮驅(qū)動控制特性,采用分散控制策略,設(shè)計模糊PD 控制器.通過實驗對比可知,與PD 控制器相比,本文提出的模糊PD 控制器能夠有效減少超調(diào)量,超調(diào)量為前者的22.6%,并且最大跟蹤誤差為前者的38.8%,具有更優(yōu)的動態(tài)響應(yīng)特性.
3)搭建實驗平臺進行試驗,實驗結(jié)果表明該磁懸浮平臺具有良好的靜態(tài)懸浮效果,x、y方向靜態(tài)懸浮的均方根誤差分別為7.19、2.95 μm.實驗同樣驗證了該平臺在x、y方向均可實現(xiàn)4 mm 的行程范圍,且具備x、y軸的組合工作能力,即該平臺可滿足4 mm × 4 mm 的平面范圍內(nèi)的運動控制.
綜上,本文提出的新型磁懸浮平臺具備懸浮與驅(qū)動解耦的能力;同時所設(shè)計的模糊PD 控制器使得平臺具有平面內(nèi)運動可控的能力,能夠?qū)崿F(xiàn)毫米級的行程以及微米級的精度.為磁懸浮技術(shù)運用于激光微細加工,提高其加工精度提供了可能性.但實驗數(shù)據(jù)同樣表明,結(jié)果仍存在一定的穩(wěn)態(tài)誤差,同時各單元之間的耦合仍然不可忽略.因此,為提高運動控制的準確性,在后續(xù)的工作中將引入積分控制項或者采納更為合適的控制算法,滿足快速響應(yīng)和穩(wěn)定性的同時,進一步消除穩(wěn)態(tài)誤差.
猜你喜歡
計算機應(yīng)用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創(chuàng)作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應(yīng)用(2022年2期)2022-03-01 12:33:42
計算機應(yīng)用(2022年1期)2022-02-26 06:57:42
計算機應(yīng)用(2021年4期)2021-04-20 14:06:36
數(shù)學(xué)小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應(yīng)用(2021年3期)2021-03-18 13:44:48
計算機應(yīng)用(2021年1期)2021-01-21 03:22:38
數(shù)學(xué)小靈通·3-4年級(2017年11期)2017-11-29 01:35:50