基于機載LIDAR的水庫庫容計算
2023-12-23 04:37:46郜士彬汪詩奇許世民
水利技術監督 2023年12期
關鍵詞:測量
郜士彬,汪詩奇,許世民
(中國電建集團昆明勘測設計研究院有限公司,云南 昆明 650000)
水下地形成果對于水庫、水電站、河流湖泊等的管理治理至關重要,隨著我國科技技術水平發展,水下地形測量方法與設備均取得了一定突破,由最初的測深桿/尺/錘、全站儀及GNSS設備、有人船單波束、有人船多波束,發展到今天的無人單波束測量船及無人多波束測量船等高集成快速測量設備。
在測量計算水庫庫容方面,劉國元[1]介紹了利用CASS軟件等高線法土方計算庫容的方法,許曉霞[2]、王元超[3]等學者提出了使用GIS技術進行水庫庫容計算的方法,施春榮[4]、董闖[5]、吳凱[6]等研究了使用DEM模型計算水庫庫容的方法,馬俊[7]使用Civil 3D中曲面分析工具進行水庫庫容計算,周偉[8]根據水下實測數據,推導閉合曲面的數學模型,結合Matlab軟件對庫容進行計算,王曉莉[9]分別使用斷面法、三角網法和方格網法進行了庫容計算并分析其了精度,李浩等介紹了等高線法和離散點法兩種水庫庫容計算方法[10],苗正紅利用遙感和GIS技術,提出了一種基于像元的三維水面庫容計算方法[11],何亮[12]研究了一種綜合CORS系統和多波束設備在水庫淤積測量的方法,張金山[13]綜合使用地面LIDAR和水下多波速測量技術對水庫庫容進行計算,唐卓君等使用GPS與無人測量船設備對水庫測量,采用等高線法和DEM方格網法對庫容進行計算[14],周長江[15]、陳杭[16]等使用無人機傾斜攝影和無人船技術結合的方法對庫容進行測算。
以往單波束和多波束水下測量手段,激光需要通過水體傳播,涉及多種傳播誤差,由于水下不可見,一般不容易驗證其成果精度,本文提出一種基于無人機機載LIDAR的測量方法,在水庫清庫期間進行激光雷達掃描及攝影測量,獲得海量點云和影像,通過點云分類濾波得到高精度DEM成果,結合影像數據進行地形圖繪制,分別利用等高線法和DEM法進行庫容計算,從而得到較為可靠準確的庫容量。
1 技術流程
無人機載LIDAR(Light Laser Detection and Ranging)是激光探測和測距系統的簡稱,一般由激光掃描儀、GNSS定位、IMU慣導、高分辨率相機等精密設備和地面控制站系統組成。激光掃描儀發射回波脈沖獲取目標的距離、反射率及斜率等信息,相機設備可以獲取探測目標的高清照片信息,通過數據處理生成具有三維坐標的海量點云和正射影像成果(DOM)。LIDAR具有很強的植被穿透力和高效的作業能力,多回波技術可以快速獲取高精度的地面三維坐標,高程精度可以達到cm級。
基于無人機載LIDAR水庫庫容測量主要作業技術流程包括空域申請、實地踏勘和航線規劃、控制測量與外業航測(LIDAR數據和影像)、GNSS與IMU聯合解算、數據處理(點云數據和影像)、DEM和DOM成果生成、地形圖編繪(等高線生成和地物采集)、庫容計算、精度檢查等,如圖1所示。
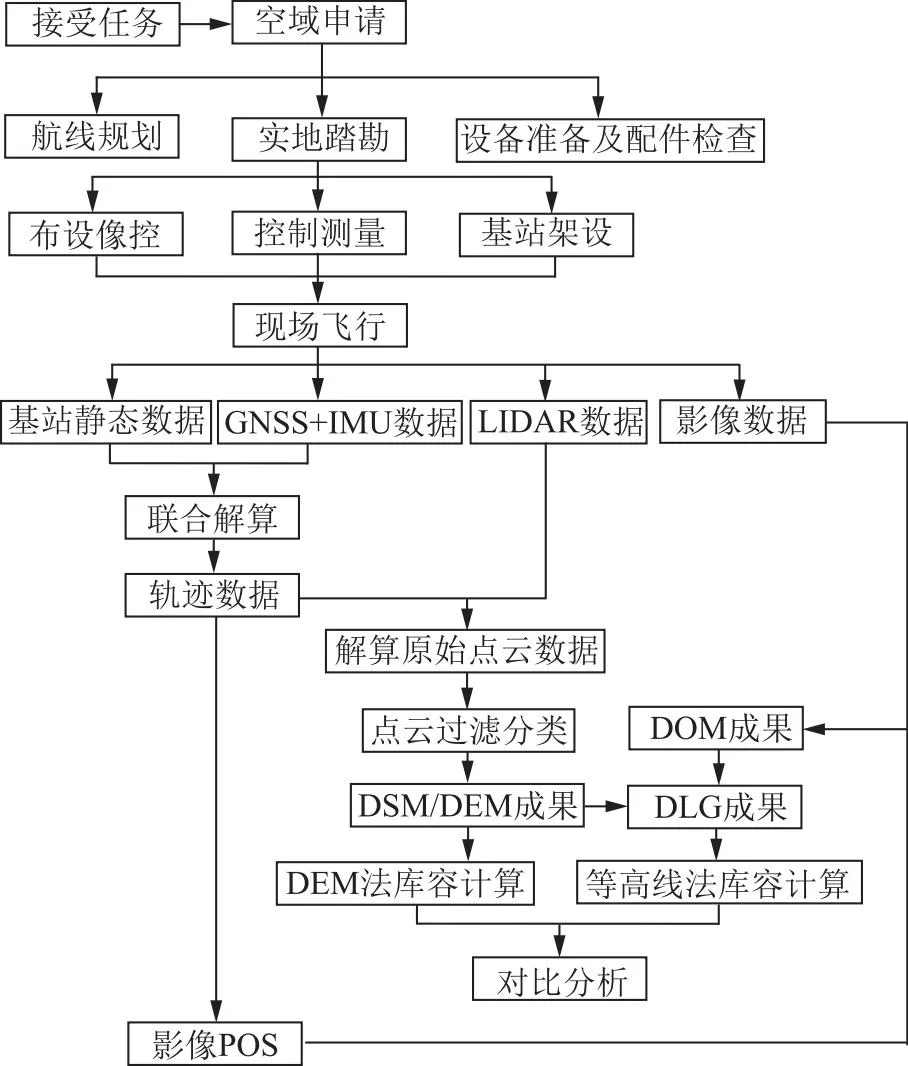
圖1 無人機機載LIDAR測量主要技術流程
1.1 外業采集
本次測量采用了多旋翼無人機M300RTK+AlphaAir450短測程機載雷達系統,該系統配置2400萬像素相機,最大測程450m,測距精度可達2cm@50m、3cm@100m,綜合測量精度平面10cm、高程5cm,測量點頻24萬點/秒,測區范圍內能達到30point/m2的點密度。無人機機載雷達系統數據采集流程如下。
1.1.1機載雷達數據采集
(1)無人機組裝以及雷達系統安裝,無人機組裝包括腳架安裝、機翼旋鈕鎖扣、漿葉展開以及電池安裝,同時將電池卡扣上鎖。雷達安裝包括雷達與飛機組裝、雷達天線安裝以及雷達天線數據線與雷達接連。
(2)在奧維地圖上選取作業區塊起飛點,保證整個測區信號較好。利用WPM軟件規劃測區航線。
(3)GNSS基站架設,基站架設需要設置項目坐標系以及輸入中央子午線;后續測定基準站點位;采樣間隔設置為2HZ(0.5秒),要保證在雷達開機之前設置靜態模式,在雷達關機后1-2分鐘后再停止靜態采集。
(4)遙控器航線按照任務調取,執行飛行任務,執行完畢后無人機返航。
(5)原始數據導出進行、數據預處理包括POS解算、平差,最終生成點云成果。
1.1.2影像數據采集
(1)像控點測量,像片控制點的目標影像應清晰,易于判刺和立體量測,一般采用油漆或膩子粉布設“L”形地標,采用RTK測量像控坐標。
(2)航攝影像采集,本次采集影像分辨率為優于0.1m,航向重疊度設為80%,旁向重疊度為65%,綜合考慮照片分辨率和重疊率,仿地飛行相對航高設置為100m。
1.2 數據處理
內業數據處理包括點云數據處理和影像處理。點云處理軟件為Inertial Explore和Terrasolid軟件,影像處理軟件主要為Context Capture Center軟件,主要作業流程如圖2所示。
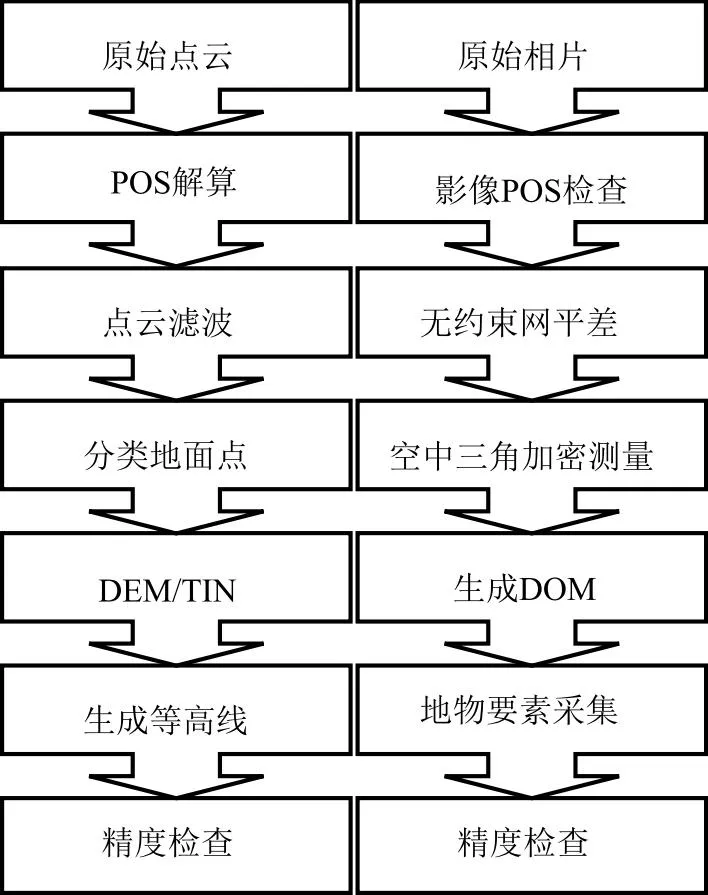
圖2 點云及影像處理流程示意圖
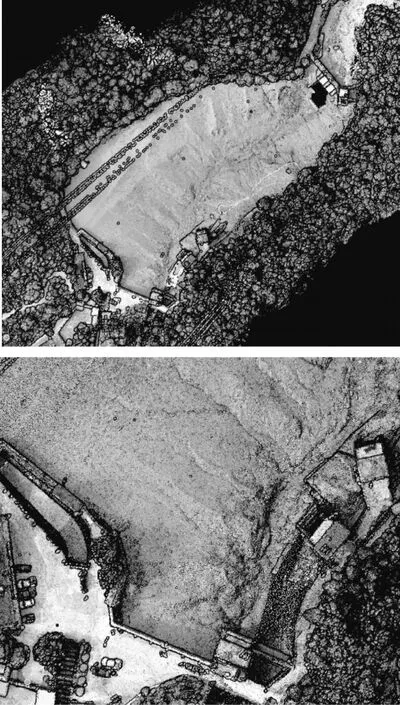
圖3 彩色點云數據
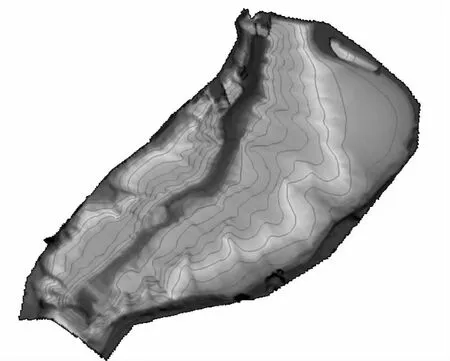
圖4 DEM及等高線成果
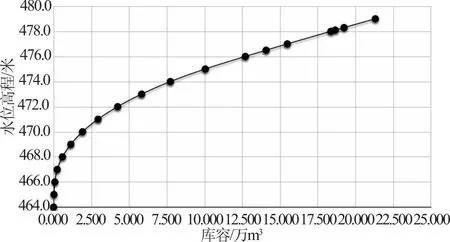
圖5 水位高程-庫容曲線關系圖
(1)POS解算,利用Inertial Explore軟件對原始點云數據和GNSS基站數據進行解算。
(2)點云濾波,原始點云通過參數轉換獲得要求的坐標系統和高程系統下的點云成果,點云數據通過剔除低點以及孤立點,然后通過濾波獲取地面點。
(3)數據檢查和編輯。由于軟件自動化提取的地面點比較粗糙,通過點云數據檢查和編輯對地面點進行進一步的糾正,以求獲得最準確的地面點。
(4)高精度DEM及等高線成果生成。本項目根據地面點構建高精度DEM,在Terrasolid中自動生成等高線,根據比例尺設定等高距,然后進行少量的人工編輯得到等高線成果,最終獲得地形成果。
(5)正射影像生成,利用Context Capture Center軟件自動化生成DOM成果。
(6)成果檢查,利用外業測量檢查點進行數據成果質量檢查,精度合格后可根據DEM和等高線計算庫區庫容。
1.3 庫容計算
1.3.1等高線法庫容計算
(1)同一高程位面積量算利用ArcGIS軟件建立地形圖屬性數據庫,屬性為面積。圖斑劃分以封閉等高線為邊界,算得的各獨立圖斑塊的面積就是同一高程層面等高線所圍面積。
(2)量算面積檢查:由于采用計算機建立地形圖屬性數據庫,各圖斑面積由計算機自動量取,精度很高。為了進一步檢查各圖斑范圍是否準確,用全庫每根封閉等高線為圖斑邊界建立屬性數據庫,用于檢查初始面積量算是否準確,特別注意形成孤島部分不計入水域面積,庫底凸出部分亦相同。
(3)兩高程層面間的庫容按以下公式(1)和(2)計算:
V=L×(A+B)÷2……IF(A-B)÷A≤0.4
(1)
3……ij(A-B)÷A>0.4
(2)
式中,L—層間高,m;A—上層面積,m2;B—下層面積,m2(A>B)。
1.3.2DEM法庫容計算
主要步驟如下:
(1)利用分類地面點云按照分析范圍進行提取,在Terrasolid軟件的TerraModeler模塊中構建surfaces model。
(2)按照分析范圍構建基準平面,創建邊界線,設置基準面高程為479m。
(3)使用computer quantity工具中的四棱柱和三棱柱兩種方法計算水庫庫容。
2 工程實例
綠水河電站水庫測量項目位于云南省個舊市蔓耗鎮綠水河上,本項目共采集點云4個架次,獲取點云9000萬個,影像采集1個架次,布設測量5個像控點,獲取影像226張,航飛面積約0.1km2。
按照技術流程方法進行點云濾波、點云分類、提取地面點、坐標轉換、生成DEM及等高線成果,利用等高線法和DEM法進行庫容計算。
水庫原設計總庫容32.4萬m3,經1995年實測修正為26.03萬m3;原設計有效庫容為24.4萬m3,經1995年實測修正為19.65萬m3;死庫容為1.98萬m3。
水庫不同高程面對應水庫面積及庫容關系見表1。由計算成果可知,水庫死水位庫容1.918萬m3,校核總庫容19.250萬m3(以修正校核洪水位為準)。
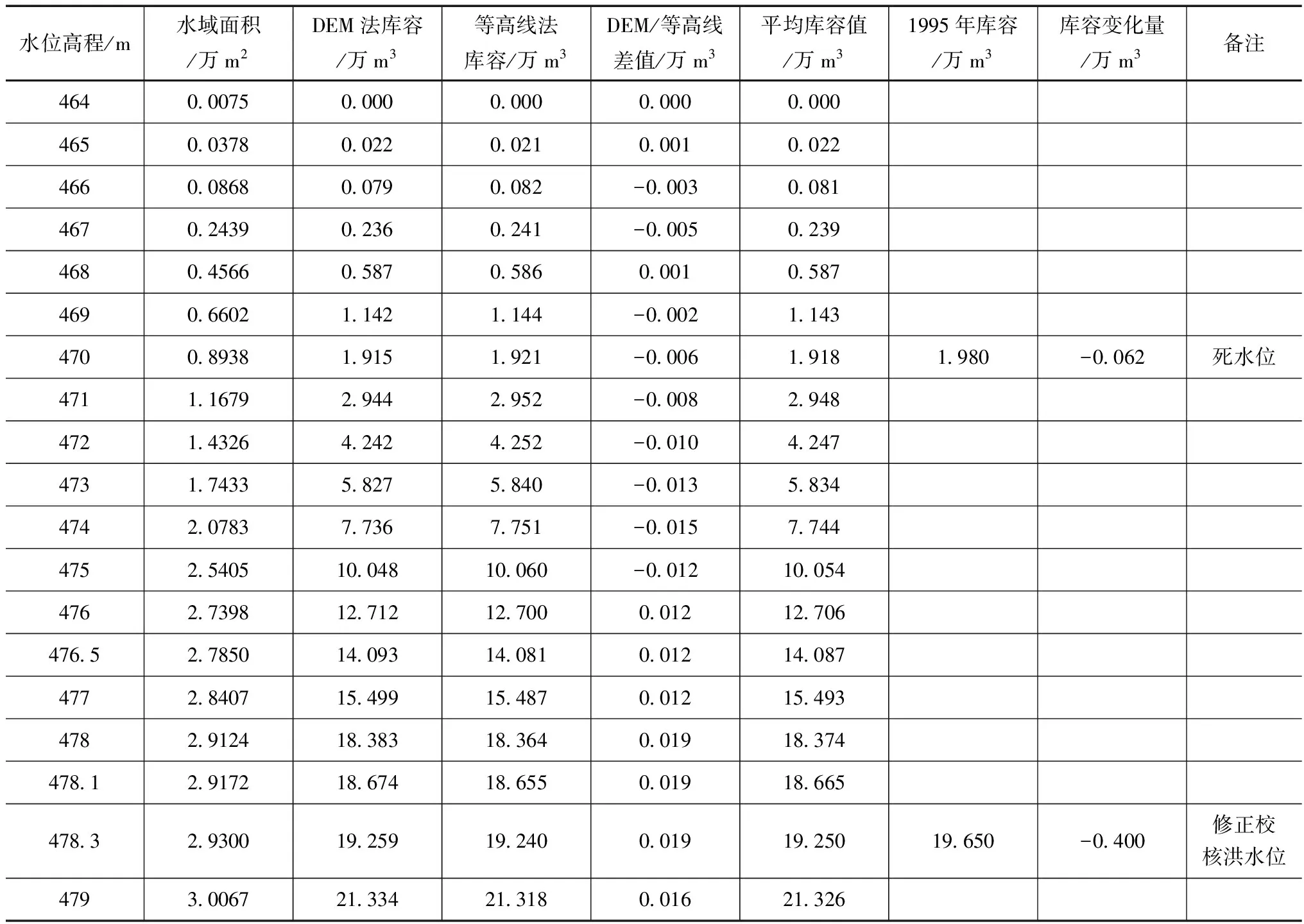
表1 DEM法與等高線法計算庫容成果對比表
基于無人機機載LIDAR的水庫庫容測量方法,使用DEM法和等高線法進行庫容計算,其結果顯示差別不大,479m高程位差值為0.016萬m3,占庫容總量的0.08%;與1995年庫容值相比,本次測量計算的庫容值減少了,說明該水庫1995年至今有了淤積,淤積量大概在0.4萬m3。
3 結語
相對于傳統水下測量方式,無人機機載LIDAR系統具有穿透力強、無接觸、全天候、效率快、高程精度高、安全等特點,可以生成高精度DEM、DOM、DLG、DSM等成果,應用前景廣闊。機載LIDAR在水庫低水位或者清庫期間進行測量,無需接觸水面進行水下測量,安全可靠。不需要布設大量像控點,直接采集的地面三維坐標精度高,尤其是高程精度高且效率快;測量水庫成果可直接外業驗證,點云密度大,生成的DEM數據和等高線數據精度高,庫容計算成果精度高,可以很好地應用在水下地形測量、庫容計算、淤積測量等方面。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
