北斗+低軌通導(dǎo)一體位置服務(wù)網(wǎng)絡(luò)與低空經(jīng)濟(jì)應(yīng)用
2023-12-25 00:59:46賈詩雨蔚保國
信息通信技術(shù) 2023年5期
賈詩雨 蔚保國 劉 亮
1 衛(wèi)星導(dǎo)航系統(tǒng)與裝備技術(shù)國家重點(diǎn)實(shí)驗(yàn)室 石家莊 050081
2 中國電子科技集團(tuán)公司第五十四研究所 石家莊 050081
引言
低空經(jīng)濟(jì)一般是指海拔3 000米以下的飛行經(jīng)濟(jì)活動(dòng),主要是民用通用航空飛行器和無人機(jī)。全球低空經(jīng)濟(jì)尚處于起步階段,但潛力巨大。隨著地面交通擁堵問題的日益嚴(yán)重和無人機(jī)技術(shù)的逐漸成熟,全世界都在積極探索培育低空經(jīng)濟(jì)產(chǎn)業(yè)。據(jù)統(tǒng)計(jì),美國的低空經(jīng)濟(jì)以載人飛機(jī)通用航空業(yè)為主,每年可產(chǎn)生超過1 500億美元的GDP[1]。中國截至2022年底,全國無人機(jī)運(yùn)營企業(yè)1.5萬家,年產(chǎn)值1 170億元。
目前低空飛行的監(jiān)管主要以政策為主,缺乏有效的技術(shù)監(jiān)管手段,尤其是近年來飛速發(fā)展的“低小慢”飛行器,“看不見、叫不到、管不住”的問題尤其突出。受限于定位導(dǎo)航技術(shù)、通信技術(shù)、感知技術(shù)、計(jì)算能力和智能算法的發(fā)展進(jìn)程,導(dǎo)致政府難以對低空進(jìn)行有效的管控,企業(yè)得不到滿足要求的飛行管理服務(wù),嚴(yán)重制約了低空經(jīng)濟(jì)的發(fā)展[2]。國家對于低空經(jīng)濟(jì)和低軌通導(dǎo)一體化位置服務(wù)的發(fā)展的政策扶植也逐步加強(qiáng),2021年,中共中央、國務(wù)院印發(fā)《國家綜合立體交通網(wǎng)規(guī)劃綱要》[3]。2023年6月,《無人駕駛航空器飛行管理暫行條例》頒布[4]。另外我國規(guī)劃的國家綜合PNT體系中,也提到了利用北斗+低軌通導(dǎo)一體的位置服務(wù)網(wǎng)絡(luò)作為無人機(jī)和智能駕駛等未來新應(yīng)用的基礎(chǔ)服務(wù)設(shè)施。北斗+低軌通導(dǎo)一體的位置服務(wù)網(wǎng)絡(luò)作為新型基礎(chǔ)設(shè)施的一部分,將為低空經(jīng)濟(jì)的發(fā)展做出巨大的貢獻(xiàn)。
1 問題及挑戰(zhàn)
現(xiàn)階段我國低空管理相關(guān)標(biāo)準(zhǔn)的發(fā)布較為滯后,各個(gè)廠家各自為戰(zhàn),無法有效實(shí)施統(tǒng)一管理。為確保低空飛行安全,實(shí)現(xiàn)低空全空域內(nèi)航空器可觀測、可通信、可管理,中國工程院樊邦奎院士建議,應(yīng)加強(qiáng)無人機(jī)行業(yè)應(yīng)用頂層設(shè)計(jì),建設(shè)低空智聯(lián)網(wǎng)[5],其中北斗+低軌通導(dǎo)一體化位置服務(wù)網(wǎng)絡(luò)將是未來低空智聯(lián)網(wǎng)的重要基礎(chǔ)設(shè)施。
我國現(xiàn)有的通信、導(dǎo)航和監(jiān)控(CNS)基礎(chǔ)設(shè)施僅能滿足對高空飛行器的管理需求。隨著無人機(jī)產(chǎn)業(yè)的發(fā)展,目前的系統(tǒng)無法滿足無人機(jī)城市物流、巡檢等新低空應(yīng)用CNS的需求。基于低空空域環(huán)境復(fù)雜性和飛行器智能化的需求,需要解決以下方面的問題與挑戰(zhàn)。
1)飛行器定位精度問題:衛(wèi)星導(dǎo)航系統(tǒng)可以在開闊場景為無人機(jī)提供全天時(shí)的精準(zhǔn)位置和時(shí)間服務(wù)。但是由于衛(wèi)星導(dǎo)航信號本身信號落地功率弱,在城市低空這種信號遮擋較多、電磁環(huán)境復(fù)雜的運(yùn)行場景,無法提供泛在、高精度導(dǎo)航定位服務(wù)。
2)飛行器通信問題:通信是將飛行器定位結(jié)果回傳和實(shí)現(xiàn)飛行器管控的重要手段。目前民航通信主要通過VHF電臺實(shí)現(xiàn)管制臺與飛行員的語音通信,無法實(shí)現(xiàn)數(shù)字化控制;無人機(jī)通信一般只能實(shí)現(xiàn)無人機(jī)飛手與無人機(jī)之間一對一的通信,無法滿足未來數(shù)字化統(tǒng)一管理運(yùn)行的需求。
3)飛行器導(dǎo)航問題:低空活動(dòng)高頻次、高密度的飛行特點(diǎn)要求更加數(shù)字化精細(xì)化協(xié)同化的飛行器導(dǎo)航模式,而非傳統(tǒng)航空采用的航點(diǎn)(waypoint)模式,或者無人機(jī)的目視導(dǎo)航模式。
4)飛行器的監(jiān)視問題:目前高空航空監(jiān)視主要以廣播式自動(dòng)相關(guān)監(jiān)視(ADS-B)為主,但是其有限信道不足以支撐低空大容量的飛行模式。另外ADS-B系統(tǒng)主要以衛(wèi)星導(dǎo)航系統(tǒng)作為導(dǎo)航源,導(dǎo)航信號極易受到干擾和欺騙,這使得ADS-B航空監(jiān)視的可信性和完好性大大降低。
綜上,現(xiàn)有CNS系統(tǒng)的能力還不能支撐未來低空環(huán)境下數(shù)字化無人系統(tǒng)等的高精度定位、通信、導(dǎo)航和監(jiān)控服務(wù)需求,需要北斗+低軌通導(dǎo)一體化位置服務(wù)網(wǎng)絡(luò)提供泛在精準(zhǔn)可信的位置服務(wù)來解決低空服務(wù)中定位精度不足、數(shù)字化導(dǎo)航能力缺失和監(jiān)視信息連續(xù)性/可信性/完好性差的問題;提供高容量低時(shí)延的低軌通信服務(wù)來解決飛行器數(shù)字化通信管理缺失和監(jiān)視容量不足的問題。
2 主要技術(shù)路線
為了解決目前低空環(huán)境下無人機(jī)數(shù)字化精準(zhǔn)運(yùn)行面臨的定位精度、通信、導(dǎo)航和監(jiān)視問題,需要北斗+低軌通導(dǎo)一體化位置服務(wù)網(wǎng)絡(luò)提供泛在精準(zhǔn)可信的位置服務(wù)和高容量高可信的低軌通信服務(wù),主要技術(shù)路線如下。
2.1 泛在精準(zhǔn)可信的位置服務(wù)技術(shù)路線
為解決低空復(fù)雜環(huán)境下定位精度不足以及抗干擾能力不強(qiáng)的問題,提高復(fù)雜環(huán)境下的低空飛行器監(jiān)視的連續(xù)性、可信性以及完好性,科學(xué)界提出多種導(dǎo)航技術(shù)與算法。其中通導(dǎo)一體化技術(shù)由于可以實(shí)現(xiàn)通信導(dǎo)航的相互賦能,是提升位置服務(wù)能力的重要途經(jīng),是解決低空環(huán)境下無人機(jī)泛在精準(zhǔn)可信導(dǎo)航問題的首選方案[6-7]。
通導(dǎo)一體化是指通信和導(dǎo)航系統(tǒng)通過信號、信息、平臺、網(wǎng)絡(luò)等多層次的一體化設(shè)計(jì),實(shí)現(xiàn)通信導(dǎo)航業(yè)務(wù)能力的協(xié)同與增強(qiáng),通導(dǎo)一體化可劃分為信息增強(qiáng)、信號協(xié)同、體制融合三個(gè)方向。
信息增強(qiáng)是指通信導(dǎo)航系統(tǒng)保持各自基本體制不變,打通通信與導(dǎo)航系統(tǒng)的信息交互接口,實(shí)現(xiàn)服務(wù)能力的互增強(qiáng),導(dǎo)航系統(tǒng)利用通信傳輸?shù)脑鰪?qiáng)信息,可以大大縮短定位收斂時(shí)間,并且提升抗欺騙、抗干擾的能力,從而解決低空服務(wù)中飛行器監(jiān)視信息連續(xù)性/可信性/完好性差的問題。
信號協(xié)同是指直接利用北斗信號和低軌衛(wèi)星播發(fā)的低軌導(dǎo)航信號或通導(dǎo)一體化信號進(jìn)行聯(lián)合解算,利用幾何構(gòu)型變化劇烈的低軌衛(wèi)星導(dǎo)航信號、低軌通導(dǎo)一體信號內(nèi)播發(fā)的輔助改正信息實(shí)現(xiàn)分米級動(dòng)態(tài)定位服務(wù)。從而解決低空服務(wù)中飛行器的定位精度不足和覆蓋范圍不全的問題。
體制融合是指在系統(tǒng)設(shè)計(jì)研發(fā)之初,即同步考慮了通信導(dǎo)航需求,進(jìn)行低軌衛(wèi)星通信導(dǎo)航信號體制的一體化設(shè)計(jì),進(jìn)而研制出兼具通信導(dǎo)航能力的通信定位設(shè)備,提供通導(dǎo)一體化服務(wù)[8],從而解決低空服務(wù)中飛行器數(shù)字化導(dǎo)航監(jiān)視能力缺失的問題。
2.2 高容量低時(shí)延的低軌通信服務(wù)技術(shù)路線
通信是將飛行器定位結(jié)果回傳和實(shí)現(xiàn)低空飛行器管控的重要手段,低空交通體系需要高容量低延時(shí)的通信服務(wù)網(wǎng)絡(luò)。現(xiàn)有的低空飛行器通信往往基于單一技術(shù),存在通信盲區(qū)。目前低空無人機(jī)采用專用無人機(jī)地面測控設(shè)備或者4G/5G信號進(jìn)行監(jiān)視及管控,由于信號覆蓋范圍限制,無人機(jī)作業(yè)范圍有限,尤其對于長航時(shí)無人機(jī)的遠(yuǎn)距離超視距飛行,衛(wèi)星通信手段是必要甚至是唯一的通信保障手段[9]。
針對4G/5G等地面通信網(wǎng)絡(luò)系統(tǒng)覆蓋范圍受限的制約,衛(wèi)星通信系統(tǒng)的廣域覆蓋能力可成為地面通信系統(tǒng)的重要補(bǔ)充,但是高軌衛(wèi)星由于距離較遠(yuǎn),通信容量有限,無法滿足未來低空場景大容量實(shí)時(shí)的監(jiān)視服務(wù)需求,所以需要北斗+低軌通導(dǎo)一體化位置服務(wù)網(wǎng)絡(luò)提供高容量低延時(shí)的低軌通信服務(wù)。
通過低軌衛(wèi)星通信和其它地面通信組合可實(shí)現(xiàn)更大范圍更高容量的低空通信。通過研究星地融合網(wǎng)絡(luò)架構(gòu)、星地融合網(wǎng)絡(luò)無縫切換接入技術(shù),實(shí)現(xiàn)多種異構(gòu)接入網(wǎng)絡(luò)的融合通信、多樣化的接入服務(wù),以及無縫的通信鏈路切換,根據(jù)不同的通信應(yīng)用場景,實(shí)現(xiàn)通信方式的選擇和切換,解決低空服務(wù)中飛行器數(shù)字化通信管理缺失和監(jiān)視容量不足的問題。
3 網(wǎng)絡(luò)基本框架
北斗+低軌通導(dǎo)一體化位置服務(wù)網(wǎng)絡(luò)由北斗衛(wèi)星導(dǎo)航系統(tǒng)、低軌通導(dǎo)一體化衛(wèi)星、地面導(dǎo)航信號監(jiān)測網(wǎng)和北斗+低軌位置服務(wù)平臺組成。北斗+低軌通導(dǎo)一體化位置服務(wù)網(wǎng)絡(luò)具備基于網(wǎng)絡(luò)化時(shí)空資源統(tǒng)一管理與協(xié)同監(jiān)測,可實(shí)現(xiàn)具有“泛在、精準(zhǔn)、可信”特征的位置服務(wù)和具有“高容量、低延時(shí)”特征的低軌通信服務(wù)。圖1為北斗+低軌通導(dǎo)一體化位置服務(wù)網(wǎng)絡(luò)組成示意圖。

圖1 北斗+低軌通導(dǎo)一體化位置服務(wù)網(wǎng)絡(luò)組成
3.1 北斗衛(wèi)星導(dǎo)航系統(tǒng)
北斗衛(wèi)星導(dǎo)航系統(tǒng)是北斗+低軌通導(dǎo)一體化位置服務(wù)網(wǎng)絡(luò)的基礎(chǔ),低軌導(dǎo)航信息增強(qiáng)服務(wù)、低軌快速精密定位服務(wù)北斗+低軌通導(dǎo)一體化位置服務(wù)網(wǎng)絡(luò)都以北斗三號為核心,其他的低軌通導(dǎo)一體化位置服務(wù)都是在其基礎(chǔ)上的補(bǔ)充、改正、增強(qiáng)和改進(jìn),可以配合北斗+低軌通導(dǎo)一體化位置服務(wù)網(wǎng)絡(luò)的其他系統(tǒng)為低空飛行器提供“泛在、精準(zhǔn)、可信”的位置服務(wù)。另外北斗系統(tǒng)的RDSS通信服務(wù)也可以作為衛(wèi)星通信服務(wù)的備份手段,提高低空通信服務(wù)的容量。
3.2 低軌通導(dǎo)一體化衛(wèi)星
低軌通導(dǎo)一體化衛(wèi)星是北斗+低軌通導(dǎo)一體化位置服務(wù)網(wǎng)絡(luò)的核心節(jié)點(diǎn),承載無縫覆蓋的快速高精度定位服務(wù)。利用低軌衛(wèi)星運(yùn)行速度快、可觀測性強(qiáng)等特點(diǎn)實(shí)現(xiàn)高中低軌的聯(lián)合定軌和精密授時(shí),并實(shí)現(xiàn)應(yīng)用側(cè)低空無人機(jī)的快速高精度定位能力[10]。低軌星上搭載標(biāo)準(zhǔn)低軌導(dǎo)航增強(qiáng)載荷,實(shí)現(xiàn)低軌衛(wèi)星時(shí)空基準(zhǔn)建立與維持、低軌信號播發(fā)以及增強(qiáng)信息傳遞。目前低軌通導(dǎo)一體化衛(wèi)星網(wǎng)絡(luò)主要依托國家衛(wèi)星互聯(lián)網(wǎng)工程進(jìn)行建設(shè)。
傳統(tǒng)導(dǎo)航依賴衛(wèi)星導(dǎo)航系統(tǒng)且服務(wù)覆蓋范圍僅為室外開闊空間,北斗+低軌通導(dǎo)一體化位置服務(wù)網(wǎng)絡(luò)引入低軌衛(wèi)星通信導(dǎo)航信號,能夠提供導(dǎo)航手段更加多源、導(dǎo)航方式更加多樣、能夠覆蓋低空經(jīng)濟(jì)活躍的更多復(fù)雜場景。
相較于傳統(tǒng)導(dǎo)航系統(tǒng)提供的5~10米量級定位精度,北斗+低軌通導(dǎo)一體化位置服務(wù)網(wǎng)絡(luò)利用幾何構(gòu)型變化劇烈的低軌衛(wèi)星、云端輔助改正信息快速生成與播發(fā)能夠提供分米量級定位服務(wù)[11-12],低空用戶定位精度與速度得到大大提升。
相較于傳統(tǒng)的高軌通信衛(wèi)星,低軌通導(dǎo)一體化衛(wèi)星可以支持更大的空域通信容量和更低的延時(shí),支持更高密度的低空用戶。
3.3 地面導(dǎo)航監(jiān)測網(wǎng)
地面導(dǎo)航監(jiān)測網(wǎng)是由遍布全國的地基監(jiān)測站點(diǎn)組成,具備監(jiān)測北斗衛(wèi)星、低軌衛(wèi)星下行信號能力。地基監(jiān)測站點(diǎn)監(jiān)測的全國觀測數(shù)據(jù)以及低軌星星載觀測數(shù)據(jù)傳送至北斗+低軌位置服務(wù)平臺,支持形成低軌星基增強(qiáng)的快速高精度定位服務(wù)能地力。地面導(dǎo)航監(jiān)測網(wǎng)是提供精準(zhǔn)、可信位置服務(wù)的保障。
3.4 北斗+低軌位置服務(wù)平臺
北斗+低軌位置服務(wù)平臺是實(shí)現(xiàn)北斗+低軌衛(wèi)星通導(dǎo)一體化導(dǎo)航位置服務(wù)的數(shù)據(jù)處理平臺,可實(shí)現(xiàn)北斗+低軌通導(dǎo)一體化定位、管制服務(wù)的推送。其服務(wù)的可信性由網(wǎng)絡(luò)中居于“第三方”位置的北斗+低軌位置服務(wù)平臺提供保障,監(jiān)測評估中心可完成網(wǎng)絡(luò)中各種導(dǎo)航源信號域/信息域多維度評估[13-14],監(jiān)測評估信息實(shí)時(shí)推送云端服務(wù)中心進(jìn)行比對,確保提供低空位置服務(wù)的可信性。
4 服務(wù)能力
北斗+低軌通導(dǎo)一體位置服務(wù)網(wǎng)絡(luò)旨在為全球低空用戶在GNSS的基礎(chǔ)上提供低軌導(dǎo)航定位增強(qiáng)服務(wù),實(shí)現(xiàn)協(xié)同、融合、智能、全覆蓋、全天候、全領(lǐng)域的定位服務(wù),為低空經(jīng)濟(jì)中的通航載人飛行、無人物流、無人機(jī)巡檢、無人機(jī)測繪、無人機(jī)遙感等領(lǐng)域提供高精度定位解決方案。
北斗+低軌通導(dǎo)一體化位置服務(wù)網(wǎng)絡(luò)可以同時(shí)從信息增強(qiáng)、信號協(xié)同和體制融合三個(gè)方面來增強(qiáng)低空城市環(huán)境下導(dǎo)航位置服務(wù)能力。
4.1 低軌導(dǎo)航信息增強(qiáng)服務(wù)
低軌導(dǎo)航信息增強(qiáng)服務(wù)利用低軌衛(wèi)星的通信鏈路,播發(fā)北斗系統(tǒng)導(dǎo)航電文、精密改正數(shù)等信息,輔助低空用戶提高定位精度,縮短首次定位時(shí)間。另外利用低軌通信鏈路為用戶提供高容量、低延時(shí)的低軌通信服務(wù)。
北斗+低軌導(dǎo)航信息增強(qiáng)服務(wù)流程如圖2所示,地面段通過地面網(wǎng)絡(luò)從其他系統(tǒng)或網(wǎng)絡(luò)獲得北斗系統(tǒng)導(dǎo)航電文、精密改正數(shù)等導(dǎo)航增強(qiáng)信息,通過信關(guān)站上注給低軌衛(wèi)星,低軌衛(wèi)星將導(dǎo)航增強(qiáng)信息播發(fā)給低空用戶。
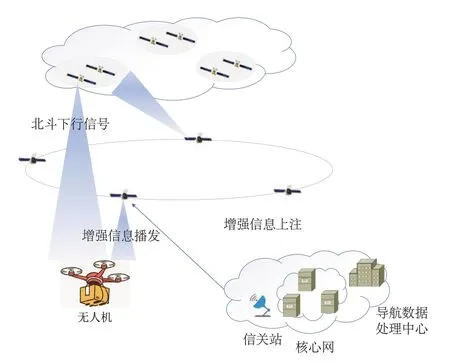
圖2 北斗+低軌導(dǎo)航信息增強(qiáng)服務(wù)示意圖
信息增強(qiáng)不提供額外的距離觀測量,只提供北斗/GNSS系統(tǒng)導(dǎo)航電文、消除GNSS誤差的修正信息和完好性信息。低空用戶通過通信鏈路接收導(dǎo)航電文速率較高,能夠縮短首次定位時(shí)間;通過接收增強(qiáng)信息實(shí)現(xiàn)定位誤差修正,最終提高定位精度。
導(dǎo)航信息增強(qiáng)中GNSS精密電文提供的軌道精度為5cm,鐘差0.15ns,通過低軌衛(wèi)星快速播發(fā),輔助GNSS進(jìn)行精密單點(diǎn)定位(PPP)。本節(jié)采用實(shí)際觀測數(shù)據(jù),利用GNSS精密軌道和鐘差(精度5cm),分析導(dǎo)航信息增強(qiáng)定位精度。在一天時(shí)間內(nèi),低空用戶定位誤差如圖3所示。
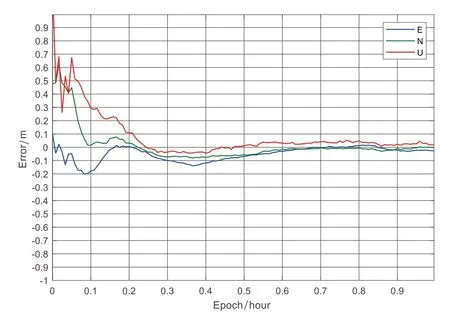
圖3 北斗+低軌導(dǎo)航信息增強(qiáng)服務(wù)示意圖
由圖3的定位結(jié)果,低空用戶定位誤差在水平和垂直方向上均優(yōu)于1分米,可實(shí)現(xiàn)低空城市場景下亞米級高精度定位服務(wù)。綜上,低軌導(dǎo)航信息增強(qiáng)服務(wù)可以解決城市低空復(fù)雜環(huán)境下的定位速度慢和定位精度差的問題。
4.2 低軌導(dǎo)航信號協(xié)同定位服務(wù)
低軌導(dǎo)航信號協(xié)同定位服務(wù)是指利用低軌衛(wèi)星播發(fā)低軌導(dǎo)航增強(qiáng)信號,利用北斗信號和低軌導(dǎo)航增強(qiáng)信號進(jìn)行協(xié)同定位服務(wù)。低軌衛(wèi)星導(dǎo)航信號具有較好的穿透性、抗干擾型和防欺騙性,可以在城市低空復(fù)雜環(huán)境中提供實(shí)時(shí)有效的高精度導(dǎo)航定位服務(wù)。另外低軌衛(wèi)星運(yùn)行速度較快,在一定時(shí)間內(nèi)幾何構(gòu)型變化較快,能夠很好地改善GNSS系統(tǒng)的空間構(gòu)型,可以大大縮短低空無人機(jī)的首次定位時(shí)間和信號中斷后重新定位時(shí)間。
低軌衛(wèi)星播發(fā)的快速精密定位信號類似導(dǎo)航信號,同樣在L頻段,調(diào)制有偽碼可實(shí)現(xiàn)偽距的測量,由于低軌衛(wèi)星的特點(diǎn),信號落地電平超過一般導(dǎo)航信號20dB以上,并且其導(dǎo)航電文中包含北斗系統(tǒng)導(dǎo)航電文、精密改正數(shù)等導(dǎo)航增強(qiáng)信息。地面段通過地面網(wǎng)絡(luò)從其他系統(tǒng)或網(wǎng)絡(luò)獲得北斗系統(tǒng)導(dǎo)航電文、精密改正數(shù)等導(dǎo)航增強(qiáng)信息,通過信關(guān)站上注給低軌衛(wèi)星;低軌衛(wèi)星根據(jù)上注信息播發(fā)導(dǎo)航增強(qiáng)快速精密定位信號,無人機(jī)終端同時(shí)接收北斗導(dǎo)航信號和低軌導(dǎo)航增強(qiáng)快速精密定位信號進(jìn)行聯(lián)合解算,可實(shí)現(xiàn)分鐘級收斂和分米級高精度定位。當(dāng)導(dǎo)航信號遮蔽或者干擾嚴(yán)重時(shí),也可以使用低軌快速精密定位信號獨(dú)立定位,大大提高城市低空導(dǎo)航定位服務(wù)的完好性和可用性。北斗+低軌衛(wèi)星聯(lián)合快速精密定位服務(wù)流程如圖4所示。
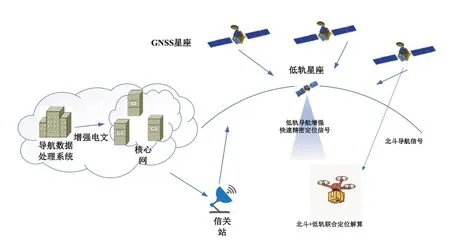
圖4 北斗+低軌衛(wèi)星聯(lián)合快速精密定位服務(wù)示意圖
低軌衛(wèi)星參與聯(lián)合解算相當(dāng)于增加新的系統(tǒng),需要考慮系統(tǒng)間偏差,以最終實(shí)現(xiàn)北斗+低軌通導(dǎo)融合聯(lián)合定位。對于北斗+低軌衛(wèi)星聯(lián)合定位,為了推導(dǎo)簡潔這里不考慮各種誤差源的影響,得到如下觀測方程:
為解算低空用戶的實(shí)時(shí)位置,必須將2個(gè)時(shí)間系統(tǒng)中的衛(wèi)星在軌位置劃歸到同一時(shí)間尺度下,而且必須將2種坐標(biāo)系下的衛(wèi)星位置轉(zhuǎn)換到同一種坐標(biāo)系中。北斗+低軌衛(wèi)星聯(lián)合定位組合定位計(jì)算時(shí),每個(gè)系統(tǒng)都有自己的時(shí)間系統(tǒng),并且各時(shí)系間存在一定偏差。所以,在多系統(tǒng)組合算法中針對每個(gè)系統(tǒng)引入不同的接收機(jī)鐘差參數(shù),對上述兩個(gè)公式線性化從而有以下多系統(tǒng)組合算法的數(shù)學(xué)模型:
令
采用上述解算方法,結(jié)合54所發(fā)射的天象1號低軌實(shí)驗(yàn)衛(wèi)星發(fā)射的快速精密定位信號進(jìn)行在軌實(shí)驗(yàn),單北斗與北斗+低軌快速精密定位誤差序列如圖5所示。
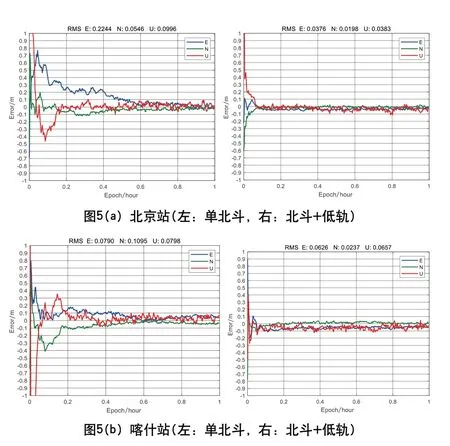
圖5 單北斗與北斗+低軌快速精密定位誤差序列
由圖5可知快速精密定位精度優(yōu)于單北斗定位精度,在定位收斂后可以實(shí)現(xiàn)分米級高精度定位。
當(dāng)GNSS與低軌衛(wèi)星軌道與鐘差誤差時(shí),為了減少隨機(jī)觀測噪聲對收斂時(shí)間的影響,進(jìn)行500次蒙特卡羅仿真,其中當(dāng)?shù)蛙壭l(wèi)星空間信號測距誤差(SISRE)分別為0、0.03m、0.05m、0.08m、0.1m時(shí)的收斂時(shí)間統(tǒng)計(jì)如圖6所示。
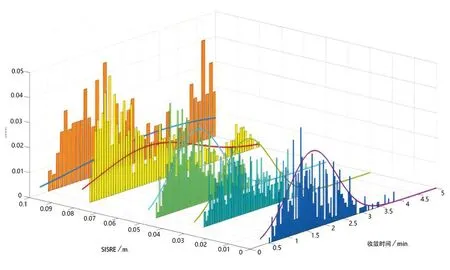
圖6 不同低軌衛(wèi)星SISRE時(shí)PPP收斂時(shí)間變化情況
由圖6可知,低軌衛(wèi)星的偽距誤差小于0.05m時(shí),可以支持快速精密定位服務(wù)實(shí)現(xiàn)分鐘級收斂。
4.3 低軌導(dǎo)航體制融合服務(wù)
低軌導(dǎo)航體制融合服務(wù)技術(shù)是指在系統(tǒng)設(shè)計(jì)研發(fā)之初,即同步考慮了通信導(dǎo)航需求,進(jìn)行了通信導(dǎo)航信號體制的一體化設(shè)計(jì)。低軌導(dǎo)航體制融合服務(wù)技術(shù)是利用低軌衛(wèi)星的通信信號,在通信信號內(nèi)部調(diào)制導(dǎo)航信號,利用通信信號傳輸?shù)目沼噘Y源來進(jìn)行導(dǎo)航服務(wù),可以為低空用戶提供更加泛在、更加可信的位置服務(wù)。
但是由于通信信號沒有調(diào)制偽碼,無法進(jìn)行通過偽距測量的方法來進(jìn)行定位,所以低軌衛(wèi)星通導(dǎo)一體化服務(wù)通常利用L頻段進(jìn)行單星多普勒定位。由于直接測量瞬時(shí)多普勒頻移較為困難,故采用測量一定時(shí)間間隔內(nèi)的多普勒周數(shù)的方法進(jìn)行相對多普勒測量。單星多普勒定位的基本方程為
單星多普勒定位原理是利用連續(xù)觀測的衛(wèi)星到測站的多普勒數(shù)據(jù)進(jìn)行定位。對于一次觀測,單星多普勒觀測量的解可以由與測站速度方向成某一夾角的圓錐面來表示,如圖7所示。
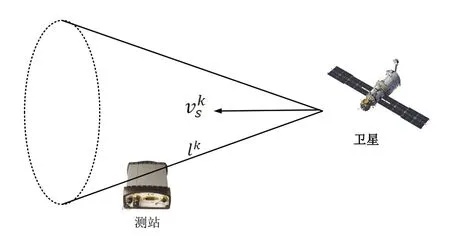
圖7 接收機(jī)與星多普勒幾何關(guān)系
當(dāng)接收機(jī)位置靜止時(shí),低軌衛(wèi)星過境時(shí)低空用戶不斷采集數(shù)據(jù),由于低軌衛(wèi)星運(yùn)行速度較快,幾分鐘內(nèi)即可呈現(xiàn)出較大的幾何構(gòu)型變化,假設(shè)認(rèn)為此時(shí)段內(nèi)接收機(jī)和衛(wèi)星鐘差穩(wěn)定不變,那么單星多普勒定位的原理圖如圖8所示。不同歷元形成了不同的圓錐面,每個(gè)圓錐面均可列出一個(gè)方程,多個(gè)圓錐面之間存在交集,其交點(diǎn)即為測站解算的位置。
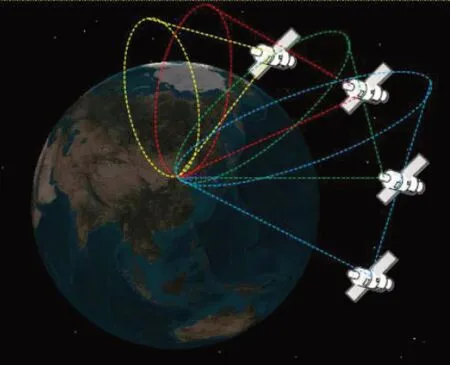
圖8 單星多普勒定位原理圖
低軌衛(wèi)星軌道軌道高度較低,一般在幾百千米到兩千千米左右,其發(fā)射信號空間損耗較小。低軌衛(wèi)星通信信號強(qiáng)度比北斗強(qiáng)大約30dB。因此低軌衛(wèi)星通導(dǎo)一體化服務(wù)可以拓寬服務(wù)范圍與場景,使在一些低空遮蔽環(huán)境、城市峽谷中的定位導(dǎo)航授時(shí)成為可能。
5 未來展望
目前,在國內(nèi)積極的政策環(huán)境中,市場主體以及國資平臺積極入局,探索低空經(jīng)濟(jì)各類場景的創(chuàng)新突破,已經(jīng)形成載貨、載人、城市管理、精準(zhǔn)農(nóng)業(yè)等場景[15]。
未來隨著低空運(yùn)行進(jìn)入到大容量高密度的發(fā)展階段,飛行和飛行監(jiān)控必然都不可能僅依賴人的參與控制,需要更加智能化的系統(tǒng)能力,提升航線規(guī)劃、飛行避障、多任務(wù)協(xié)同、監(jiān)管調(diào)度等各個(gè)方面的數(shù)字化水平。未來北斗+低軌通導(dǎo)一體位置服務(wù)網(wǎng)絡(luò)提供的泛在、精準(zhǔn)、可信位置服務(wù)和高容量、低延時(shí)低軌通信服務(wù)將推動(dòng)低空經(jīng)濟(jì)向著無人化、精準(zhǔn)化和智能化的方向發(fā)展。
1)貨運(yùn)場景
在未來北斗+低軌通導(dǎo)一體位置服務(wù)網(wǎng)絡(luò)、低空數(shù)字孿生空間和低延遲的低空通信監(jiān)控網(wǎng)絡(luò)的配合下,可以實(shí)現(xiàn)無人機(jī)的自主航線規(guī)劃和避障,實(shí)現(xiàn)城市環(huán)境下三維點(diǎn)對點(diǎn)的物流。
圖9為基于北斗+低軌通導(dǎo)一體化位置服務(wù)網(wǎng)絡(luò)和低空空域數(shù)字孿生空間[16]的物流無人機(jī)自主任務(wù)規(guī)劃及避障的未來無人機(jī)物流典型運(yùn)行場景。當(dāng)接到無人物流任務(wù)后,會(huì)在數(shù)字孿生空間進(jìn)行統(tǒng)一的任務(wù)與航路規(guī)劃,確認(rèn)無飛行沖突后進(jìn)行任務(wù)的執(zhí)行;在執(zhí)行過程中利用北斗+低軌通導(dǎo)一體位置服務(wù)網(wǎng)絡(luò)提供的泛在、精準(zhǔn)、可信的位置服務(wù)進(jìn)行導(dǎo)航;利用5G地面監(jiān)控鏈路進(jìn)行任務(wù)執(zhí)行監(jiān)控,當(dāng)5G地面監(jiān)控鏈路不可用時(shí),利用北斗+低軌通導(dǎo)一體位置服務(wù)網(wǎng)絡(luò)提供的高容量、低延時(shí)低軌通信服務(wù)進(jìn)行任務(wù)監(jiān)控,實(shí)現(xiàn)全球無縫監(jiān)視,提升系統(tǒng)的可靠性;調(diào)度中心監(jiān)視運(yùn)營范圍內(nèi)的所有無人機(jī),負(fù)責(zé)飛行沖突預(yù)警并將預(yù)警信息及時(shí)報(bào)給無人機(jī),實(shí)現(xiàn)任務(wù)重新規(guī)劃和避障。最終在北斗+低軌通導(dǎo)一體位置服務(wù)網(wǎng)絡(luò)、低空數(shù)字孿生空間、地面5G網(wǎng)絡(luò)和調(diào)度中心的配合下完成無人機(jī)物流配送。
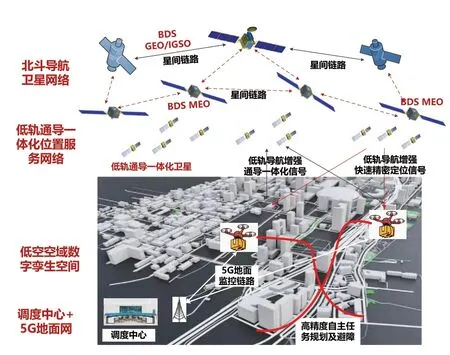
圖9 未來無人機(jī)物流典型運(yùn)行場景
2)載人場景
作為直升機(jī)運(yùn)營方的各通航企業(yè)不斷拓展航線及飛行架次,如東部通航建設(shè)與管理運(yùn)行機(jī)場達(dá)30個(gè)以上,不斷延伸業(yè)務(wù)至跨境、商務(wù)、城際、游覽、應(yīng)急等眾多場景;而以億航、小鵬匯天為首的載人級自動(dòng)駕駛飛行器企業(yè)也在各個(gè)地區(qū)試點(diǎn)運(yùn)行。
未來北斗+低軌通導(dǎo)一體位置服務(wù)網(wǎng)絡(luò)、低空數(shù)字孿生空間和低延遲的低空通信監(jiān)控網(wǎng)絡(luò)等基礎(chǔ)設(shè)施的建設(shè)讓低空載人自動(dòng)駕駛航線設(shè)立與管理成為可能,未來出行人類可能會(huì)乘坐空中“飛行的士”。
3)城市管理場景
因巡檢、救援等場景替代人效應(yīng)明顯,商業(yè)模式已基本跑通,該場景目前發(fā)展最為成熟;且由于尺寸類似于消費(fèi)級無人機(jī),飛行審批也相較其他場景簡單。
未來伴隨北斗+低軌通導(dǎo)一體位置服務(wù)網(wǎng)絡(luò)、低空數(shù)字孿生空間和低延遲的低空通信監(jiān)控網(wǎng)絡(luò)等基礎(chǔ)設(shè)施的構(gòu)建完善,無人機(jī)巡檢、救援、植保等場景將進(jìn)一步滲透。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
今日農(nóng)業(yè)(2019年14期)2019-09-18 01:21:54
今日農(nóng)業(yè)(2019年12期)2019-08-15 00:56:32
中國生殖健康(2019年3期)2019-02-01 06:12:26
今日農(nóng)業(yè)(2019年10期)2019-01-04 04:28:15
今日農(nóng)業(yè)(2019年15期)2019-01-03 12:11:33
今日農(nóng)業(yè)(2019年16期)2019-01-03 11:39:20
商周刊(2017年9期)2017-08-22 02:57:56
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
