基于ADC-BP模型的對(duì)地攻擊無人機(jī)自主作戰(zhàn)效能評(píng)估
2023-12-27 07:18:50邵明軍劉樹光嚴(yán)驚濤
空軍工程大學(xué)學(xué)報(bào) 2023年6期
邵明軍,劉樹光,嚴(yán)驚濤
(空軍工程大學(xué)裝備管理與無人機(jī)工程學(xué)院,西安,710051)
近年來,隨著無人技術(shù)與智能技術(shù)融合發(fā)展,以對(duì)地攻擊無人機(jī)為代表的無人自主作戰(zhàn)樣式在實(shí)戰(zhàn)環(huán)境中得到廣泛應(yīng)用。研究自主作戰(zhàn)能力,評(píng)估自主作戰(zhàn)效能,是衡量對(duì)地攻擊無人機(jī)在特定作戰(zhàn)條件下完成預(yù)定目標(biāo)任務(wù)的有效途徑,對(duì)對(duì)地攻擊無人機(jī)的戰(zhàn)術(shù)使用和裝備研發(fā)具有實(shí)踐指導(dǎo)意義。
目前,效能評(píng)估的常用方法有層次分析法、模糊評(píng)判法[1]、灰色關(guān)聯(lián)法[2],ADC模型法[3]等。眾多評(píng)估方法中,ADC法作為一種較為成熟的評(píng)估方法,具有綜合性強(qiáng),評(píng)估過程全面,模型層次清晰等優(yōu)點(diǎn),主要是通過系統(tǒng)3大要素,即系統(tǒng)可用性A、系統(tǒng)可靠性D、系統(tǒng)能力C來對(duì)武器裝備效能進(jìn)行評(píng)估。文獻(xiàn)[3]基于ADC模型建立效能評(píng)估方法,提出了適用于無人裝備的效能評(píng)估模型;文獻(xiàn)[4]考慮到武器作戰(zhàn)使用方式和效能影響因素優(yōu)化了傳統(tǒng)ADC模型,實(shí)現(xiàn)了有人/無人機(jī)對(duì)海攻擊協(xié)同作戰(zhàn)的效能評(píng)估;文獻(xiàn)[5]將人為因素與傳統(tǒng)ADC模型相結(jié)合,實(shí)現(xiàn)了對(duì)武器裝備效能的有效評(píng)估;文獻(xiàn)[6]在考慮設(shè)備運(yùn)行條件和環(huán)境適應(yīng)性影響基礎(chǔ)上,引入環(huán)境適應(yīng)能力改進(jìn)評(píng)估方法,構(gòu)建了無人機(jī)效能評(píng)估模型;文獻(xiàn)[7]結(jié)合具體作戰(zhàn)任務(wù),對(duì)能力向量C進(jìn)行重新定義、構(gòu)建的基礎(chǔ)上優(yōu)化了ADC評(píng)估模型,解決了無人機(jī)作戰(zhàn)能力依靠固有能力靜態(tài)評(píng)估的問題。文獻(xiàn)[8]基于產(chǎn)品分解結(jié)構(gòu)PBS思想,提出了PBS-ADC模型,將無人偵察機(jī)系統(tǒng)分解成各子系統(tǒng),并重點(diǎn)分析了系統(tǒng)的可用性、可靠性指標(biāo),解決了無人偵察機(jī)研發(fā)階段ADC模型效能評(píng)估不足的問題。
分析現(xiàn)有文獻(xiàn)不難發(fā)現(xiàn),傳統(tǒng)ADC評(píng)估模型及改進(jìn)型的應(yīng)用對(duì)智能化武器裝備的任務(wù)特點(diǎn)、作戰(zhàn)場(chǎng)景、作戰(zhàn)過程分析較少,部分評(píng)估只是針對(duì)武器裝備的靜態(tài)性能進(jìn)行系統(tǒng)效能評(píng)估,而沒有結(jié)合作戰(zhàn)任務(wù)、對(duì)抗環(huán)境,有針對(duì)性地對(duì)武器系統(tǒng)的動(dòng)態(tài)作戰(zhàn)效能進(jìn)行評(píng)估;其次,對(duì)影響作戰(zhàn)效能的因素考慮也較為簡單,指標(biāo)體系的構(gòu)建缺乏與作戰(zhàn)過程、對(duì)抗環(huán)境的有效結(jié)合,無法貼近實(shí)戰(zhàn)任務(wù),真實(shí)反映作戰(zhàn)效能指標(biāo);由于能力向量的構(gòu)建沒有統(tǒng)一的框架及公式,大多數(shù)都是依靠靜態(tài)固有能力來分析,無法結(jié)合作戰(zhàn)過程來綜合評(píng)判作戰(zhàn)能力的發(fā)揮,評(píng)估過程也僅停留在對(duì)各個(gè)指標(biāo)參數(shù)的加權(quán),主觀性較強(qiáng)。
綜合以上分析,本文在傳統(tǒng)ADC評(píng)估方法的基礎(chǔ)上,面向?qū)Φ毓魺o人機(jī)在實(shí)戰(zhàn)化背景下的任務(wù)目標(biāo)、戰(zhàn)法使用以及動(dòng)態(tài)效能評(píng)估的需求,考慮戰(zhàn)場(chǎng)真實(shí)對(duì)抗環(huán)境以及影響無人機(jī)自主性發(fā)揮的人為干預(yù)因素,提出一種改進(jìn)ADC評(píng)估模型結(jié)構(gòu);同時(shí),有效結(jié)合對(duì)地攻擊無人機(jī)具體作戰(zhàn)流程,分析實(shí)際作戰(zhàn)對(duì)抗中真實(shí)的戰(zhàn)場(chǎng)表現(xiàn),拓展評(píng)估模型的自主作戰(zhàn)能力C的范圍,構(gòu)建能夠充分反映自主作戰(zhàn)效能的能力指標(biāo)體系;基于GA-BP方法改進(jìn)了傳統(tǒng)ADC方法對(duì)能力向量的計(jì)算。
1 自主作戰(zhàn)效能評(píng)估模型構(gòu)建
1.1 自主作戰(zhàn)效能評(píng)估框架
作戰(zhàn)效能是指在規(guī)定的作戰(zhàn)環(huán)境條件下,運(yùn)用武器系統(tǒng)及其相應(yīng)的兵力執(zhí)行規(guī)定的作戰(zhàn)任務(wù)時(shí)所能達(dá)到的預(yù)期目標(biāo)程度[9]。無人機(jī)自主作戰(zhàn)效能受作戰(zhàn)任務(wù)、作戰(zhàn)適宜性以及自主能力[10]等因素的影響。
作戰(zhàn)適宜性是指裝備在實(shí)際使用環(huán)境下滿足裝備訓(xùn)練和作戰(zhàn)使用要求的程度[9]。本文主要針對(duì)對(duì)地攻擊無人機(jī)的環(huán)境適用性和使用適用性兩方面進(jìn)行研究,即無人機(jī)的作戰(zhàn)環(huán)境的適用性以及無人機(jī)在作戰(zhàn)環(huán)境下是否“好用”的程度。根據(jù)對(duì)地攻擊無人機(jī)作戰(zhàn)任務(wù)的特點(diǎn),環(huán)境適用性主要考慮裝備受自然環(huán)境、電磁環(huán)境、人為因素等的影響;使用適用性主要分析裝備的可靠性、可用性兩個(gè)方面。以上因素能夠從整體角度靜態(tài)衡量對(duì)地攻擊無人機(jī)在實(shí)戰(zhàn)環(huán)境下受非作戰(zhàn)能力因素影響的程度。
因此,本文參照ALFUS評(píng)估框架的思想[12],從任務(wù)復(fù)雜度、環(huán)境復(fù)雜度、人工干預(yù)程度3個(gè)維度,結(jié)合對(duì)地攻擊無人機(jī)的作戰(zhàn)任務(wù)、作戰(zhàn)適宜性、自主能力3個(gè)要素,改進(jìn)ADC模型評(píng)估方法對(duì)對(duì)地攻擊無人機(jī)的自主作戰(zhàn)過程進(jìn)行研究,評(píng)估框架見圖1。
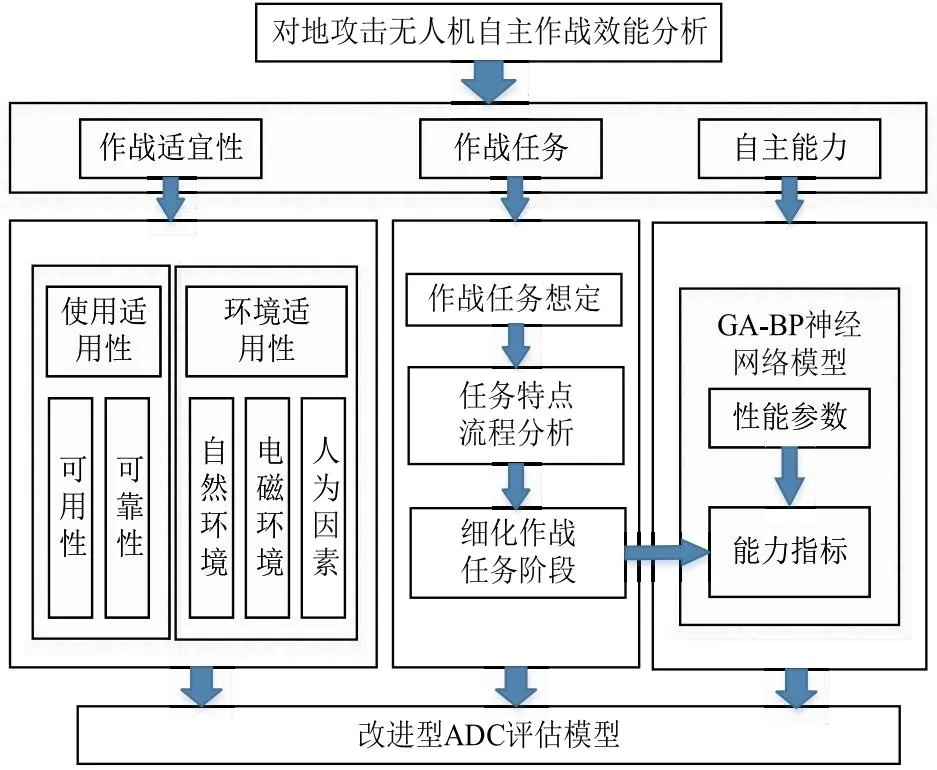
圖1 對(duì)地攻擊無人機(jī)自主作戰(zhàn)效能評(píng)估框架
該評(píng)估框架以戰(zhàn)場(chǎng)環(huán)境下對(duì)地攻擊無人機(jī)執(zhí)行作戰(zhàn)任務(wù)為基礎(chǔ),充分結(jié)合作戰(zhàn)效能邏輯結(jié)構(gòu)、作戰(zhàn)流程、作戰(zhàn)功能,從靜態(tài)、動(dòng)態(tài)兩個(gè)方面綜合考慮,構(gòu)建指標(biāo)評(píng)價(jià)體系,改進(jìn)效能評(píng)估模型和方法,對(duì)無人機(jī)自主作戰(zhàn)效能進(jìn)行研究。首先,全面分析對(duì)地攻擊無人機(jī)具體作戰(zhàn)任務(wù),明確對(duì)地攻擊無人機(jī)特定任務(wù)下的作戰(zhàn)適宜性各要素,結(jié)合無人機(jī)系統(tǒng)狀態(tài)描述和任務(wù)過程中狀態(tài)變化情況,確定裝備在作戰(zhàn)環(huán)境下裝備可用性、裝備可靠性,針對(duì)對(duì)地攻擊無人機(jī)受實(shí)戰(zhàn)環(huán)境的因素影響程度,確定影響自主作戰(zhàn)效能的具體因素;根據(jù)對(duì)對(duì)地攻擊無人機(jī)作戰(zhàn)任務(wù)想定,細(xì)化分解作戰(zhàn)全過程,通過全面分析每個(gè)作戰(zhàn)階段的動(dòng)態(tài)過程以及在對(duì)抗過程中自主能力的綜合表現(xiàn),提煉與每個(gè)作戰(zhàn)階段相適應(yīng)的作戰(zhàn)能力指標(biāo),并運(yùn)用GA-BP神經(jīng)網(wǎng)絡(luò)方法,通過主觀評(píng)判與客觀評(píng)估預(yù)測(cè)相結(jié)合的思想確定自主作戰(zhàn)能力結(jié)果。最后,通過改進(jìn)ADC評(píng)估模型,得到對(duì)地攻擊無人機(jī)自主作戰(zhàn)效能評(píng)估結(jié)果。
1.2 改進(jìn)的ADC模型方法
ADC模型是美國工業(yè)界武器系統(tǒng)效能咨詢委員會(huì)提出的系統(tǒng)效能模型[13],根據(jù)武器的可用性、可靠性和能力3個(gè)要素來評(píng)價(jià)武器系統(tǒng)。其模型的數(shù)學(xué)表達(dá)式為[14]:
E=A×D×C
(1)

ADC模型方法作為武器系統(tǒng)評(píng)估方法應(yīng)用很廣泛,但也有一定的局限性,僅涉及裝備的可靠性、可用性及固有能力,主要側(cè)重在武器裝備的系統(tǒng)效能評(píng)估,未考慮具體作戰(zhàn)類型、戰(zhàn)場(chǎng)環(huán)境、人為因素對(duì)無人機(jī)作戰(zhàn)效能的影響。為此,本文結(jié)合對(duì)地攻擊無人機(jī)實(shí)戰(zhàn)背景,充分考慮戰(zhàn)場(chǎng)環(huán)境影響因素H和人為干預(yù)因素R對(duì)無人機(jī)自主作戰(zhàn)能力的影響,將兩者引入系統(tǒng)效能評(píng)估模型中。同時(shí)考慮兩者作為環(huán)境適用性的指標(biāo),是無人機(jī)環(huán)境適應(yīng)能力的綜合體現(xiàn),在實(shí)戰(zhàn)過程中只造成無人機(jī)部分作戰(zhàn)能力的削弱或降級(jí),不對(duì)系統(tǒng)性能造成故障。即改進(jìn)后的ADC評(píng)估模型表達(dá)式為:
E=A×D×C×(1-H)×(1-R)
(2)
另外,運(yùn)用傳統(tǒng)ADC模型方法對(duì)裝備進(jìn)行評(píng)估的過程中,能力向量C的構(gòu)建往往沒有統(tǒng)一的標(biāo)準(zhǔn)框架及公式,大部分還停留在層次分析法、模糊評(píng)估法以及依靠專家評(píng)分獲得各項(xiàng)能力指標(biāo)的權(quán)重,使得評(píng)估過程具有較強(qiáng)的主觀性。同時(shí),隨著指標(biāo)數(shù)量的增加,各指標(biāo)權(quán)重的確定也愈加復(fù)雜,依靠傳統(tǒng)方法已難以處理作戰(zhàn)能力與各指標(biāo)之間的非線性關(guān)系。因此,本文結(jié)合對(duì)地攻擊無人機(jī)的作戰(zhàn)任務(wù)、作戰(zhàn)流程,在拓展能力C的基礎(chǔ)上,采用GA-BP神經(jīng)網(wǎng)絡(luò)模型對(duì)能力值進(jìn)行訓(xùn)練預(yù)測(cè),進(jìn)而高度逼近對(duì)地攻擊無人機(jī)的實(shí)際作戰(zhàn)能力值。
1.3 對(duì)地攻擊無人機(jī)作戰(zhàn)任務(wù)階段細(xì)化
本文設(shè)定對(duì)地攻擊無人機(jī),為配合作戰(zhàn)任務(wù)需要,在中低烈度對(duì)抗環(huán)境下,單機(jī)執(zhí)行壓制防空作戰(zhàn)任務(wù)。敵方區(qū)域部署有防空武器系統(tǒng)2套、電子戰(zhàn)干擾裝備1套、預(yù)警雷達(dá)設(shè)備2套、地面武裝部隊(duì)等,要求對(duì)地攻擊無人機(jī)能夠偵察、搜索、定位目標(biāo),并發(fā)射SDB空地導(dǎo)彈以及反輻射導(dǎo)彈摧毀、壓制敵方防空系統(tǒng)。
結(jié)合任務(wù)需求,對(duì)對(duì)地攻擊無人機(jī)戰(zhàn)術(shù)特點(diǎn)和作戰(zhàn)任務(wù)剖面進(jìn)行研究分析,考慮無人機(jī)執(zhí)行作戰(zhàn)任務(wù)是一個(gè)動(dòng)態(tài)的、對(duì)抗的過程,需要對(duì)其各個(gè)階段的作戰(zhàn)性能進(jìn)行分析,提煉與各個(gè)階段相適應(yīng)的作戰(zhàn)能力,并為下一步指標(biāo)模型構(gòu)建提供參考依據(jù)。根據(jù)執(zhí)行防空壓制的作戰(zhàn)目標(biāo)和任務(wù)使命,將作戰(zhàn)過程分為5個(gè)階段:
1)作戰(zhàn)準(zhǔn)備階段。根據(jù)作戰(zhàn)任務(wù)和戰(zhàn)場(chǎng)環(huán)境,研究確定作戰(zhàn)計(jì)劃,預(yù)定戰(zhàn)術(shù)規(guī)則,向無人機(jī)裝訂任務(wù)數(shù)據(jù)參數(shù),掛載任務(wù)載荷,加載燃油,檢查飛機(jī)狀況,等待作戰(zhàn)指令。
2)向目標(biāo)區(qū)域機(jī)動(dòng)階段。根據(jù)作戰(zhàn)指令起飛,向目標(biāo)區(qū)域機(jī)動(dòng)過程中開啟偵察、觀瞄系統(tǒng)、探測(cè)雷達(dá)等機(jī)載設(shè)備,實(shí)時(shí)感知周圍態(tài)勢(shì)情況,并根據(jù)態(tài)勢(shì)信息做出決策,必要時(shí)進(jìn)行戰(zhàn)術(shù)規(guī)避。
3)突防階段。抵近目標(biāo)區(qū)域時(shí),無人機(jī)通過探測(cè)感知,判斷危險(xiǎn)信息,并利用自身優(yōu)勢(shì)開展電磁干擾、高速機(jī)動(dòng)、調(diào)整航跡、隱蔽突防等方式保存自己,進(jìn)而突破敵防空火力網(wǎng),必要時(shí)可對(duì)敵預(yù)警系統(tǒng)及防空陣地進(jìn)行壓制或摧毀。
4)攻擊階段。飛臨目標(biāo)區(qū)域時(shí),無人機(jī)根據(jù)預(yù)設(shè)方案,展開搜索,定位重點(diǎn)目標(biāo),在滿足打擊條件的情況下,對(duì)敵防空陣地等重點(diǎn)部位盡早盡快發(fā)起攻擊,攻擊后可對(duì)毀傷效果進(jìn)行分析評(píng)估,判斷是否再次打擊。
5)返航階段。打擊任務(wù)完成后,無人機(jī)迅速飛離危險(xiǎn)區(qū)域,并針對(duì)自身完好情況進(jìn)行自修復(fù)或故障隔離,同時(shí)按照任務(wù)規(guī)劃選擇安全航線返航著陸。
2 自主作戰(zhàn)效能指標(biāo)分析
2.1 自主作戰(zhàn)效能指標(biāo)體系構(gòu)建
綜合考慮對(duì)地攻擊無人機(jī)壓制防空作戰(zhàn)任務(wù)過程、影響因素,參照效能評(píng)估指標(biāo)的構(gòu)建準(zhǔn)則[9],梳理歸納對(duì)地攻擊無人機(jī)的作戰(zhàn)效能指標(biāo)體系。根據(jù)無人機(jī)作戰(zhàn)適宜性,構(gòu)建對(duì)地攻擊無人機(jī)綜合效能層指標(biāo);基于無人機(jī)作戰(zhàn)任務(wù),將作戰(zhàn)全過程細(xì)分成5個(gè)階段,構(gòu)建自主作戰(zhàn)層指標(biāo);基于OODA作戰(zhàn)環(huán)理論,細(xì)化分解作戰(zhàn)流程5個(gè)階段,構(gòu)建局部效能層指標(biāo);針對(duì)作戰(zhàn)過程中無人機(jī)所展現(xiàn)出的行為,進(jìn)行量化描述,構(gòu)建裝備性能層指標(biāo),如圖2所示。
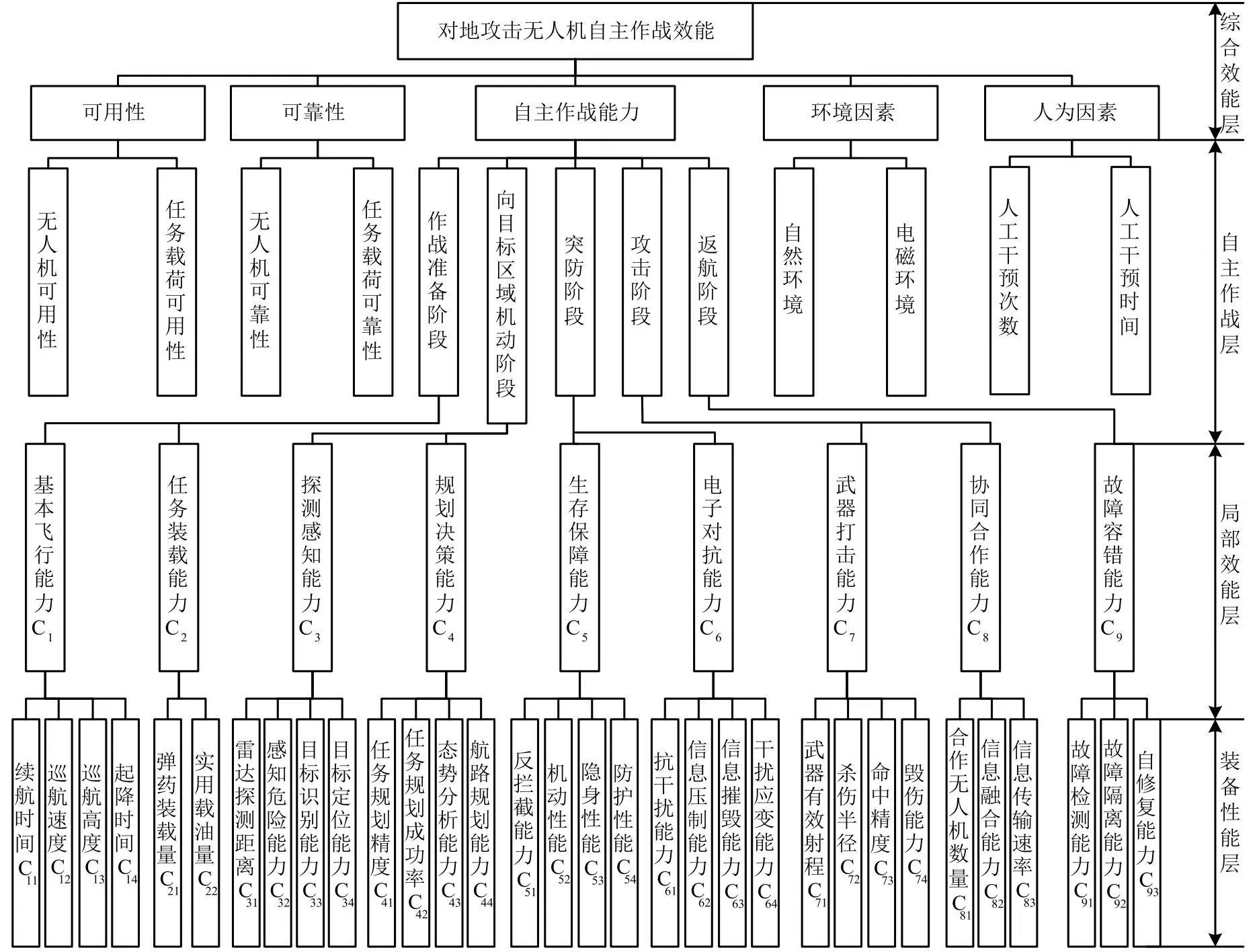
圖2 對(duì)地攻擊無人機(jī)自主作戰(zhàn)效能指標(biāo)體系
2.2 評(píng)估模型指標(biāo)分析
2.2.1 可用性向量
對(duì)地攻擊無人機(jī)可用性表示在執(zhí)行作戰(zhàn)任務(wù)前無人機(jī)所處的狀態(tài),是能夠執(zhí)行作戰(zhàn)需求程度的度量。分析可用性向量,首先要確定與其有關(guān)的結(jié)構(gòu)組成和可能出現(xiàn)的狀態(tài)數(shù)量。
本文將對(duì)地攻擊無人機(jī)分為無人機(jī)平臺(tái)和任務(wù)載荷平臺(tái)兩部分,其中任務(wù)載荷平臺(tái)包括由態(tài)勢(shì)感知和武器打擊兩部分。通常認(rèn)為無人機(jī)每個(gè)部分都處于完好狀態(tài)或故障狀態(tài),但由于機(jī)載設(shè)備多采用余度[15]設(shè)計(jì),所以本文認(rèn)為故障狀態(tài)均為非重大故障,從而確定系統(tǒng)可用性向量為:
(3)
式中:a1為任務(wù)期間無人機(jī)和任務(wù)載荷系統(tǒng)都能正常工作狀態(tài)的概率;a2為任務(wù)期間無人機(jī)系統(tǒng)工作正常,任務(wù)載荷系統(tǒng)出現(xiàn)故障的概率;a3為任務(wù)期間無人機(jī)系統(tǒng)出現(xiàn)故障,任務(wù)載荷系統(tǒng)能夠正常工作的概率;a4為任務(wù)期間無人機(jī)系統(tǒng)和任務(wù)載荷系統(tǒng)均出現(xiàn)故障的概率。
設(shè)tmtbf1、tmtbf2分別為無人機(jī)平臺(tái)、任務(wù)載荷平均故障概率時(shí)間;tmttr1、tmttr2分別為無人機(jī)平臺(tái)、任務(wù)載荷平均故障維修時(shí)間,有:
(4)
2.2.2 可靠性向量
執(zhí)行任務(wù)過程中,對(duì)地攻擊無人機(jī)存在正常工作和故障2種狀態(tài),根據(jù)其執(zhí)行任務(wù)過程中可能發(fā)生的狀態(tài)變化情況,可靠性向量表示為:
(5)
式中:dij(i,j=1,2,3,4)表示系統(tǒng)從狀態(tài)i轉(zhuǎn)移到狀態(tài)j的概率。由于無人機(jī)在執(zhí)行作戰(zhàn)任務(wù)時(shí),故障狀態(tài)不可修復(fù)。由此,可知:
d21=d23=d31=d32=d41=d42=d43=0
(6)
d44=1
(7)
假設(shè)對(duì)地攻擊無人機(jī)執(zhí)行任務(wù)時(shí)的故障概率服從指數(shù)分布,在開始執(zhí)行任務(wù)時(shí)系統(tǒng)處于可工作狀態(tài),在任務(wù)完成時(shí)仍處于可工作狀態(tài)的概率為:
pi=exp(-λit)
(8)
式中:t為執(zhí)行任務(wù)持續(xù)時(shí)間;λi為第i個(gè)子系統(tǒng)的故障率。有:
(9)
則系統(tǒng)的可靠性矩陣D為:
(10)
式中:λ1、λ2分別為無人機(jī)平臺(tái)和任務(wù)載荷執(zhí)行任務(wù)時(shí)的故障率。
2.2.3 環(huán)境因素
戰(zhàn)場(chǎng)環(huán)境作為戰(zhàn)場(chǎng)態(tài)勢(shì)的重要組成部分,對(duì)執(zhí)行作戰(zhàn)任務(wù)的無人機(jī)武器系統(tǒng)效能的影響尤其突出,具體的環(huán)境中考慮的因素也有所區(qū)別,因此本文將自然環(huán)境和電磁環(huán)境作為影響作戰(zhàn)效能一般因素來考慮,既是整體衡量作戰(zhàn)過程中戰(zhàn)場(chǎng)環(huán)境對(duì)效能的影響程度,也是無人機(jī)適應(yīng)戰(zhàn)場(chǎng)環(huán)境的能力表現(xiàn)。其中電磁環(huán)境只考慮外部電磁環(huán)境對(duì)無人機(jī)系統(tǒng)的干擾情況,電子對(duì)抗情況作為作戰(zhàn)能力來進(jìn)行分析,此處不考慮。
戰(zhàn)場(chǎng)環(huán)境影響系數(shù)H的表達(dá)式為:
(11)
式中:ωi為各指標(biāo)權(quán)重;hi為戰(zhàn)場(chǎng)環(huán)境各影響因素對(duì)系統(tǒng)效能的損傷情況,并通過專家評(píng)判進(jìn)行打分來確定。
2.2.4 人為因素
實(shí)際作戰(zhàn)過程中無人機(jī)裝備操作、指揮、保障人員,專業(yè)技能可以達(dá)到任務(wù)要求,本文不考慮人員本身素質(zhì)對(duì)無人機(jī)作戰(zhàn)任務(wù)的影響,人為因素主要指在執(zhí)行作戰(zhàn)任務(wù)期間,地面操作人員根據(jù)無人機(jī)實(shí)時(shí)傳輸?shù)男畔?對(duì)無人機(jī)飛行管理系統(tǒng)、任務(wù)管理系統(tǒng)、控制執(zhí)行系統(tǒng)、感知與通信系統(tǒng)等[16]的干預(yù)程度,通過人工對(duì)無人機(jī)自主能力的干預(yù)時(shí)間、次數(shù)來總體衡量自主能力受限程度以及對(duì)作戰(zhàn)效能的影響。
人為因素影響系數(shù)R的表達(dá)式為:
(12)
式中:ωi為各指標(biāo)權(quán)重;ri為人為因素對(duì)系統(tǒng)效能的影響值。
2.2.5 自主作戰(zhàn)能力
無人機(jī)的自主作戰(zhàn)能力主要是以自主能力在戰(zhàn)場(chǎng)環(huán)境下的作用情況來體現(xiàn)。當(dāng)其自主性越強(qiáng),應(yīng)對(duì)戰(zhàn)場(chǎng)態(tài)勢(shì)變化的能力也就越好,所展現(xiàn)的作戰(zhàn)效能也就越突出,反之體現(xiàn)的自主作戰(zhàn)效能越低。
對(duì)地攻擊無人機(jī)執(zhí)行壓制防空任務(wù)的作戰(zhàn)能力,即對(duì)敵防空系統(tǒng)及重要目標(biāo)的毀傷能力,按照作戰(zhàn)全過程進(jìn)行劃分,作戰(zhàn)能力可分為基本飛行能力、任務(wù)裝載能力、探測(cè)感知能力、規(guī)劃決策能力、生存保障能力、電子對(duì)抗能力、武器打擊能力、協(xié)同合作能力,故障容錯(cuò)能力。針對(duì)對(duì)地攻擊無人機(jī)執(zhí)行作戰(zhàn)任務(wù)全過程所展現(xiàn)出行為能力,提出基于GA-BP神經(jīng)網(wǎng)絡(luò)的自主作戰(zhàn)能力評(píng)估模型。
BP神經(jīng)網(wǎng)絡(luò)作為一種單向傳播的多層前向型神經(jīng)網(wǎng)絡(luò),能夠逼近評(píng)估模型指標(biāo)之間的非線性映射關(guān)系,克服傳統(tǒng)方法處理大量數(shù)據(jù)能力不足,但也存在訓(xùn)練速度慢、易陷入局部最優(yōu)、全局搜索能力弱等問題[17],因此,本文擬采用GA遺傳算法優(yōu)化BP神經(jīng)網(wǎng)絡(luò)初始權(quán)值和閾值,使優(yōu)化后的神經(jīng)網(wǎng)絡(luò)模型更好地進(jìn)行評(píng)估預(yù)測(cè),算法流程見圖3。
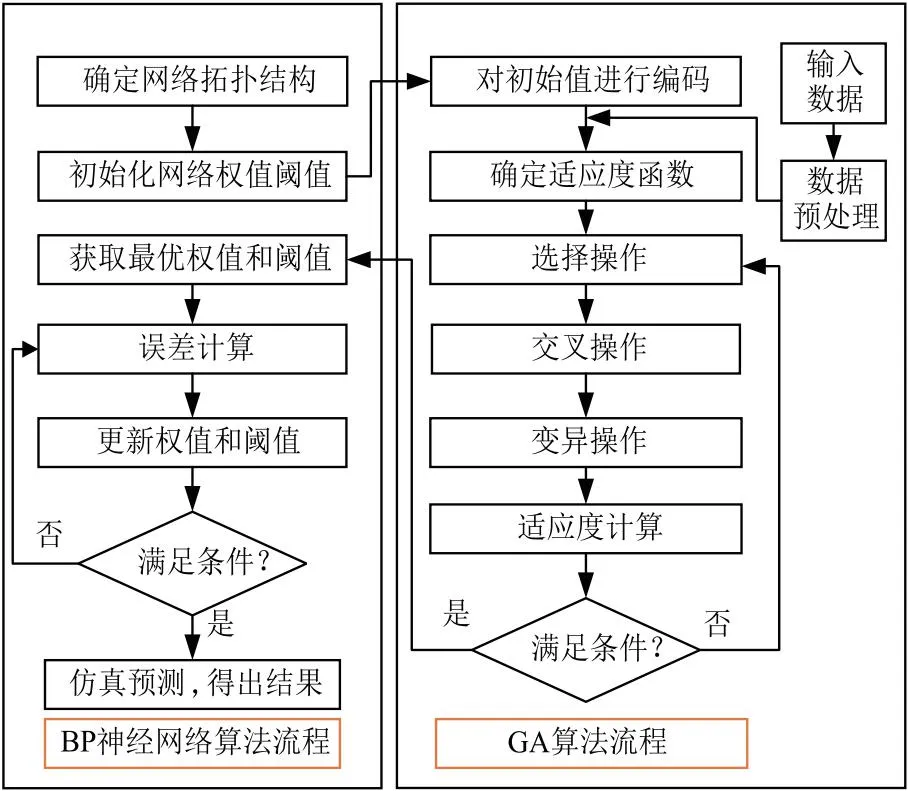
圖3 GA-BP神經(jīng)網(wǎng)絡(luò)算法流程
本文采用3層BP神經(jīng)網(wǎng)絡(luò)網(wǎng)絡(luò)對(duì)作戰(zhàn)能力進(jìn)行預(yù)測(cè),神經(jīng)網(wǎng)絡(luò)輸入層節(jié)點(diǎn)為C11~C93,分別對(duì)應(yīng)能力指標(biāo)體系底層的32個(gè)指標(biāo),輸出節(jié)點(diǎn)數(shù)為1,根據(jù)式(13)來確定隱含層節(jié)點(diǎn)數(shù):
(13)
式中:m、m0、m1分別為隱含層、輸入層、輸出層的神經(jīng)元數(shù);a為1~10之間的整數(shù)。經(jīng)過仿真試驗(yàn),當(dāng)m=8時(shí)性能表現(xiàn)最佳,見圖4。
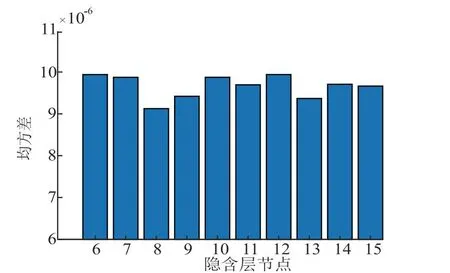
圖4 數(shù)據(jù)樣本均方差值
模型采用梯度下降動(dòng)量和自適應(yīng)學(xué)習(xí)率方法[19]進(jìn)行訓(xùn)練,作用函數(shù)為S型函數(shù):
(14)
函數(shù)用來訓(xùn)練神經(jīng)網(wǎng)絡(luò)的樣本直接關(guān)系到無人機(jī)自主能力的大小,影響自主作戰(zhàn)效能的綜合評(píng)估。為此,本文根據(jù)多次仿真試驗(yàn)得到仿真數(shù)據(jù),通過專家打分以及綜合評(píng)判,選取60組數(shù)據(jù)作為神經(jīng)網(wǎng)絡(luò)的樣本,其中選取10組數(shù)據(jù)作為測(cè)試樣本,見表1。本文取種群規(guī)模40,遺傳代數(shù)為100,訓(xùn)練目標(biāo)誤差為1×10-5,最大迭代次數(shù)為2 000,學(xué)習(xí)率為0.035,在MATLAB環(huán)境下對(duì)神經(jīng)網(wǎng)絡(luò)模型進(jìn)行訓(xùn)練,仿真情況見圖5~6。
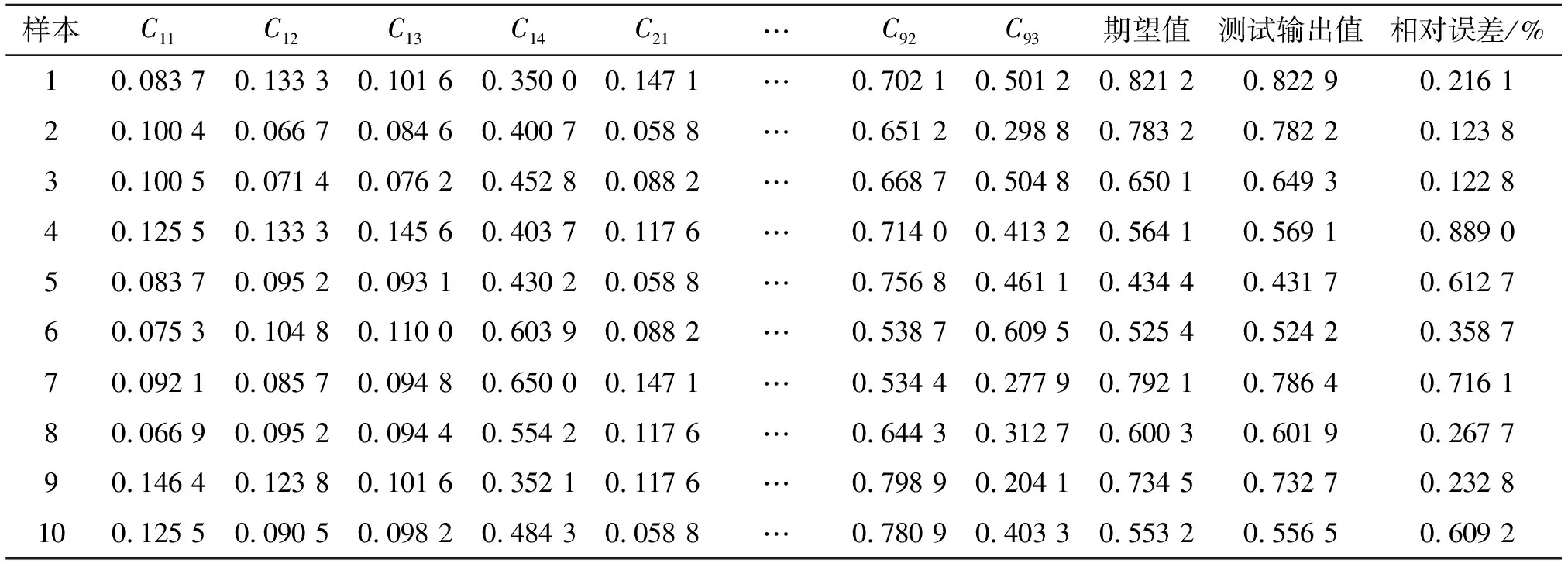
表1 歸一化后的指標(biāo)數(shù)據(jù)樣本及測(cè)試樣本數(shù)據(jù)統(tǒng)計(jì)
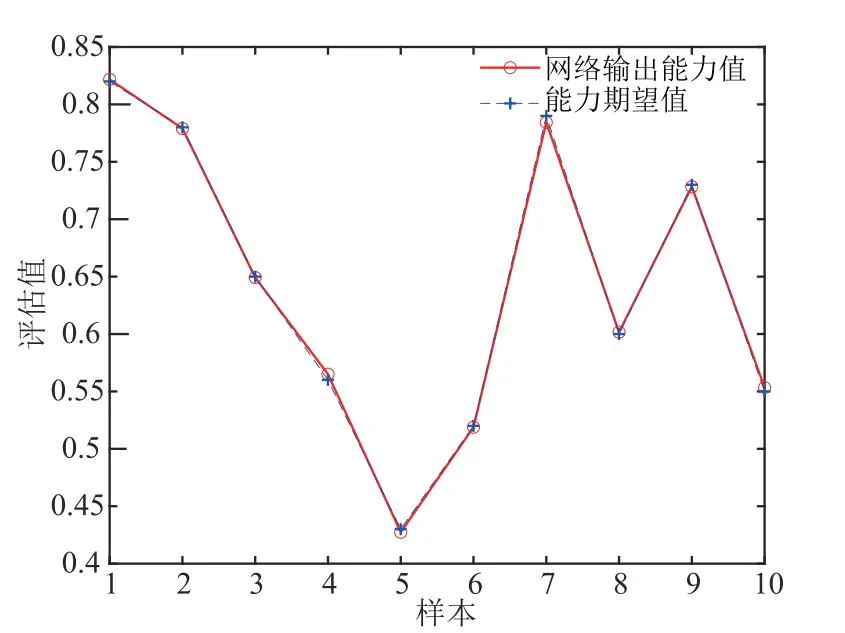
圖5 網(wǎng)絡(luò)輸出值與期望值
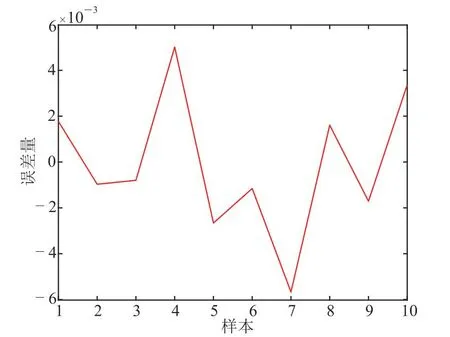
圖6 網(wǎng)絡(luò)輸出值與期望值的誤差變化曲線
從表1中可以看出,利用神經(jīng)網(wǎng)絡(luò)模型得到的測(cè)試值與專家評(píng)估的期望值之間的最大相對(duì)誤差為0.889 0%,最小相對(duì)誤差0.122 8%,證明了基于神經(jīng)網(wǎng)絡(luò)的預(yù)測(cè)方法的有效性。
3 自主作戰(zhàn)效能評(píng)估驗(yàn)證分析
假定某型對(duì)地攻擊無人機(jī)按照第1.3節(jié)任務(wù)想定在中低烈度對(duì)抗環(huán)境下執(zhí)行壓制防空作戰(zhàn)任務(wù),對(duì)其進(jìn)行自主作戰(zhàn)效能評(píng)估。用于執(zhí)行任務(wù)的對(duì)地攻擊無人機(jī)平均故障間隔時(shí)間、平均修復(fù)時(shí)間以及任務(wù)前無人機(jī)各系統(tǒng)處于正常狀態(tài)和故障狀態(tài)的概率情況,見表2~3。
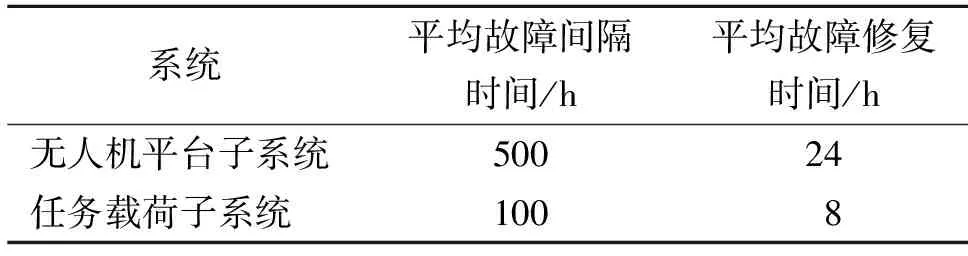
表2 對(duì)地攻擊無人機(jī)的平均故障間隔時(shí)間和修復(fù)時(shí)間
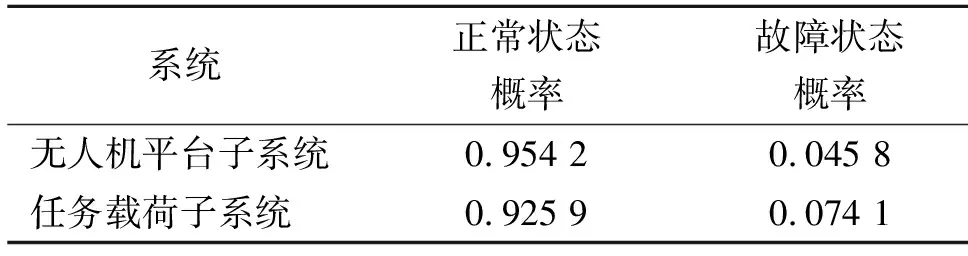
表3 對(duì)地攻擊無人機(jī)各系統(tǒng)正常、故障的概率
根據(jù)式(4)得出可用性向量A為:
(15)
假設(shè)對(duì)地攻擊無人機(jī)執(zhí)行本次作戰(zhàn)任務(wù)的持續(xù)時(shí)間為5 h,則無人機(jī)各系統(tǒng)在執(zhí)行任務(wù)期間保持正常工作的概率和轉(zhuǎn)為故障狀態(tài)的概率情況見表4。
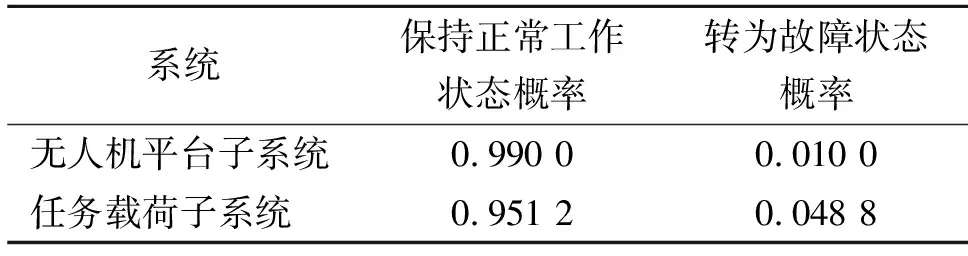
表4 對(duì)地攻擊無人機(jī)系統(tǒng)保持正常、故障狀態(tài)的概率
根據(jù)式(10),得出可靠性矩陣為:
(16)
經(jīng)過咨詢專家對(duì)戰(zhàn)場(chǎng)環(huán)境影響因素分析,進(jìn)行比較得到各因素情況,見表5。

表5 戰(zhàn)場(chǎng)環(huán)境因素兩兩比較
根據(jù)表4,計(jì)算權(quán)重得:
ω=[0.333 3 0.666 7],λmax=2,C.I.=0,C.R.=0,
滿足一致性指標(biāo)。
專家對(duì)環(huán)境影響因素打分,確定自然、電磁環(huán)境。影響因素分別為1.1、0.2,則:
(17)
通過咨詢專家對(duì)人為因素的各項(xiàng)指標(biāo)分析判斷,得出各項(xiàng)指標(biāo)的權(quán)重值,其方法與計(jì)算環(huán)境影響因素權(quán)重相同,此處不再贅述。根據(jù)對(duì)地攻擊無人機(jī)執(zhí)行作戰(zhàn)任務(wù)期間人為干預(yù)的情況,進(jìn)行統(tǒng)計(jì)分析,并將干預(yù)時(shí)間、次數(shù)進(jìn)行數(shù)據(jù)標(biāo)準(zhǔn)化處理。假設(shè)本次執(zhí)行作戰(zhàn)任務(wù)期間地面人員對(duì)無人機(jī)干預(yù)5次,干預(yù)時(shí)間總計(jì)為0.5h,可以得出人工干預(yù)的影響系數(shù)為:
(18)
將執(zhí)行本次作戰(zhàn)任務(wù)的對(duì)地攻擊無人機(jī)能力指標(biāo)參數(shù)作為預(yù)測(cè)樣本,輸入到訓(xùn)練后的神經(jīng)網(wǎng)絡(luò)模型中,得到作戰(zhàn)能力預(yù)測(cè)值,見表6。

表6 對(duì)地攻擊無人機(jī)指標(biāo)數(shù)據(jù)及預(yù)測(cè)值
根據(jù)對(duì)地?zé)o人機(jī)的裝備性能和作戰(zhàn)經(jīng)驗(yàn),無人機(jī)子系統(tǒng)發(fā)生故障時(shí),仍具備完成作戰(zhàn)任務(wù)的能力,但其作戰(zhàn)效能勢(shì)必會(huì)有不同程度的削弱。本文假設(shè):當(dāng)對(duì)地攻擊無人機(jī)出現(xiàn)一個(gè)子系統(tǒng)故障,其作戰(zhàn)能力減弱10%;出現(xiàn)兩個(gè)子系統(tǒng)故障,作戰(zhàn)能力減弱40%,則執(zhí)行本次壓制防空任務(wù),對(duì)地攻擊無人機(jī)的自主作戰(zhàn)能力為:
C=[0.813 3 0.731 9 0.731 9 0.487 9]T
(19)
根據(jù)改進(jìn)ADC模型方法式(2),對(duì)地攻擊無人機(jī)執(zhí)行壓制防空作戰(zhàn)任務(wù)的自主作戰(zhàn)效能為
E=A×D×C×(1-H)×(1-R)=0.565 3
(20)
實(shí)例分析表明,對(duì)地攻擊無人機(jī)對(duì)敵防空系統(tǒng)實(shí)施壓制的自主作戰(zhàn)效能基本達(dá)到要求。
參照傳統(tǒng)ADC模型的評(píng)估方法,該機(jī)的作戰(zhàn)效能為:
E0=A×D×C=0.798 0
(21)
從式(20)和式(21)的評(píng)估結(jié)果可以發(fā)現(xiàn),在考慮了對(duì)地攻擊無人機(jī)戰(zhàn)場(chǎng)環(huán)境和人為干預(yù)的影響因素后,其自主作戰(zhàn)效能相較于傳統(tǒng)ADC評(píng)估方法較低。這是由于傳統(tǒng)ADC評(píng)估模型沒有充分考慮無人機(jī)自主作戰(zhàn)的環(huán)境適宜性,將無人機(jī)作戰(zhàn)全過程理想化所導(dǎo)致。而在實(shí)際作戰(zhàn)過程中,無人機(jī)會(huì)受到戰(zhàn)場(chǎng)環(huán)境和人為干預(yù)因素的影響,其自主作戰(zhàn)無法發(fā)揮出最佳效能,導(dǎo)致實(shí)際效能值偏低,這與評(píng)估結(jié)果相符,進(jìn)而驗(yàn)證了改進(jìn)ADC模型的合理性。
同時(shí),考慮到壓制防空作戰(zhàn)任務(wù)的復(fù)雜性,本文假定對(duì)地攻擊無人機(jī)在作戰(zhàn)方案1“敵方強(qiáng)電磁干擾環(huán)境下”和方案2“敵方進(jìn)行空中攔截的情況下”執(zhí)行壓制防空任務(wù),其自主作戰(zhàn)效能為:
(22)
對(duì)以上2種方案作戰(zhàn)效能進(jìn)行評(píng)估,其評(píng)估結(jié)果與式(20)結(jié)果進(jìn)行對(duì)比發(fā)現(xiàn)E>E2>E1。這是由于對(duì)地攻擊無人機(jī)在復(fù)雜多變的作戰(zhàn)環(huán)境下,面對(duì)敵方不同對(duì)抗模式時(shí),無人機(jī)作戰(zhàn)階段的能力指標(biāo)側(cè)重不同,不同任務(wù)階段下自主作戰(zhàn)效能不同。方案1在強(qiáng)電磁干擾的對(duì)抗模式下,對(duì)地攻擊無人機(jī)的探測(cè)感知能力、電子對(duì)抗能力、協(xié)同合作能力會(huì)有不同程度的變化,方案2在面對(duì)敵方攔截的情況下,無人機(jī)突防困難,生存能力受到影響。由此可見,在面對(duì)不同對(duì)抗環(huán)境時(shí),自主能力并不是一成不變的,作戰(zhàn)過程中的自主能力很容易受到敵方對(duì)抗方式影響,雙方作戰(zhàn)能力在彼此攻防對(duì)抗的動(dòng)態(tài)過程中不斷變化。此外,通過分析自主能力在作戰(zhàn)過程中的動(dòng)態(tài)變化趨勢(shì),找準(zhǔn)關(guān)鍵能力指標(biāo)、調(diào)整機(jī)載設(shè)備參數(shù)、改善無人機(jī)裝備性能、提升自主作戰(zhàn)能力,將是下一步重點(diǎn)研究方向。
4 結(jié)論
本文以對(duì)地攻擊無人機(jī)執(zhí)行壓制防空任務(wù)時(shí)自主作戰(zhàn)為背景,考慮作戰(zhàn)任務(wù)、作戰(zhàn)適宜性、自主作戰(zhàn)能力,優(yōu)化改進(jìn)了傳統(tǒng)ADC評(píng)估模型;在拓展能力向量C的基礎(chǔ)上,構(gòu)建了與作戰(zhàn)全過程相適應(yīng)的指標(biāo)體系,并通過GA-BP神經(jīng)網(wǎng)絡(luò)方法設(shè)計(jì)了自主作戰(zhàn)能力評(píng)估指標(biāo)模型,最后通過實(shí)例分析驗(yàn)證了ADC-BP評(píng)估方法的有效性。本文所提出的評(píng)估模型較傳統(tǒng)ADC模型而言,考慮因素更為全面,評(píng)估過程更為科學(xué),解決了傳統(tǒng)方法過于依賴專家確定權(quán)重及主觀評(píng)價(jià)的問題,提升了效能評(píng)估應(yīng)用的適應(yīng)性和準(zhǔn)確性,為今后對(duì)地攻擊無人機(jī)自主作戰(zhàn)效能評(píng)估提供了科學(xué)依據(jù)。
猜你喜歡
發(fā)明與創(chuàng)新(2022年30期)2022-10-03 08:40:56
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
中國生殖健康(2019年11期)2019-01-07 01:28:02
人大建設(shè)(2018年6期)2018-08-16 07:23:10
文理導(dǎo)航·科普童話(2017年5期)2018-02-10 19:42:14
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
小星星·閱讀100分(低年級(jí))(2015年10期)2015-10-22 08:30:04