自由設站法在精密三維控制網構建過程中的應用
2023-12-29 01:39:16王溫靈
中國新技術新產品 2023年22期
王溫靈
(上海融測空間測繪有限公司,上海 201803)
隨著船舶工業(yè)和電子科技不斷發(fā)展,各種精密設備和傳感器在船舶中的應用越來越普遍,對船舶建造中的測量精度要求也越來越高,精準、高效的船舶測量技術越來越受關注。由于測量儀器、方法和技術不斷更新,因此需要研究人員不斷尋求更優(yōu)質、更適用的方案。
自由設站測量法常用于各等級控制網的加密、各類工程測量、臨時設站或傳遞坐標測量以及獨立工程控制網的建立與加密測量工作中[1]。高鐵CPIII 控制網就是采用自由設站法進行觀測的,控制網以線性和平面為主要特征[2-3]。自由設站法也經常應用于變形監(jiān)測中(多為單站式)[4]。該文以某大型測量船為研究對象,探究應用測量精度高、作業(yè)靈活且操作簡便的自由設站法,在地面高精度首級網的基礎上,利用多個已知點、未知點和自由設站點構建環(huán)形三維控制網,并分別建立平面和高程平差計算模型的方法。為了提高船舶測量的精度,該文提出新的控制點布設方式和觀測方法,通過試驗構建一個控制網布設與測量模型,并結合控制網的特點構建平差計算模型,該模型具有較高的通用性,便于編程。
1 研究設計
1.1 研究對象
該大型測量船的總長約125 m,型寬約25 m,羅經甲板與地面高差約25 m。需要精密測量位于船底及甲板層的多臺傳感器設備的三維空間相對位置(設計精度如下:縱坐標X為±2 mm,橫坐標Y為±2 mm,高程H為±5 mm),屬于精密工程測量范疇[5]。大船位于船臺,底部通視條件差,周邊作業(yè)空間有限,地面可以布設觀測墩的位置較少,各層甲板無法布設固定觀測墩,日間現場環(huán)境干擾因素較多,并且大氣環(huán)境條件隨時間變化較明顯,船體隨氣溫變化會產生形變。
1.2 測量儀器和設備
該文采用激光跟蹤儀靶球(SMR)配合LEICA TS60全站儀測量精密邊長、水平角和豎直角,以構建三維控制網。LEICA TS60 全站儀具有性能穩(wěn)定、角度觀測精度高(0.5″)和距離觀測精度高(0.6 mm+1×10-6×D)(D 為測距長度)以及觀測效率高等優(yōu)點,其ATR 自動照準功能配合藍牙驅動,可以對目標進行連續(xù)多測回自動觀測與記錄,被廣泛應用于高等級控制測量、核電、地鐵隧道、高鐵、水利電力、建筑工程和變形監(jiān)測等領域。該文采用的靶球(SMR)是直徑為3.81 cm(1.5 inch)的空心靶球,是API 激光跟蹤儀配套使用的精密標靶,中心三維精度高于±0.5 μm,穩(wěn)定性高,適合長時間測量;精密圓棱鏡為LEICAGPH1P 棱鏡,位置精度為±0.3 mm。采用精密靶球代替圓棱鏡,可以有效提高全站儀進行自動觀測時的照準和測量精度,還可以提高三角高程測量的精度。
1.3 控制點的布設與測量
平面控制網為兩級,高程控制為一級,共布設28 個點位,其中平面首級控制點4 個,采用地面強制對中觀測墩,高度以視線高于地面50 cm 為宜,每點安置1 套基座和精密圓棱鏡并精確整平。在船舷、船體兩側以及船底等設備安裝位置附近布設24 個靶球(SMR)點,將其作為加密控制點,磁性靶座用強力膠固定于船體。各控制點均以棱鏡或靶球的中心作為實際控制點點位,這樣不僅可以最大限度地減少觀測目標重復安置造成的精度損失,而且還便于采用激光跟蹤儀進行設備精密安裝、定位或姿態(tài)測量。
控制網的觀測時段選擇在大氣環(huán)境變化較小的夜間,并同步精確測量大氣環(huán)境數據并輸入全站儀。每個測站以全圓方向觀測法觀測2 個測回,在1 個測回中,對測站上所有要觀測的方向進行逐一照準并觀測,針對零方向,有起始和閉合2次觀測[6]。先觀測4 個首級點連接成的平面閉合導線,再進行自由設站觀測,每個測站觀測首級控制點不少于2 個,相鄰測站公共觀測點數不少于3 個,并保證每個加密點有不少于3 個測站方向的觀測,試驗中共觀測9 站,控制網模型如圖1所示。采用自由設站法進行測量可以避免架設儀器時對中誤差的傳播和積累,而且無須量取儀器高和覘標高,可以提高三角高程測量精度。此外,可以根據觀測點位的分布和現場作業(yè)環(huán)境靈活選擇設站位置,在測量過程中進一步優(yōu)化控制網。
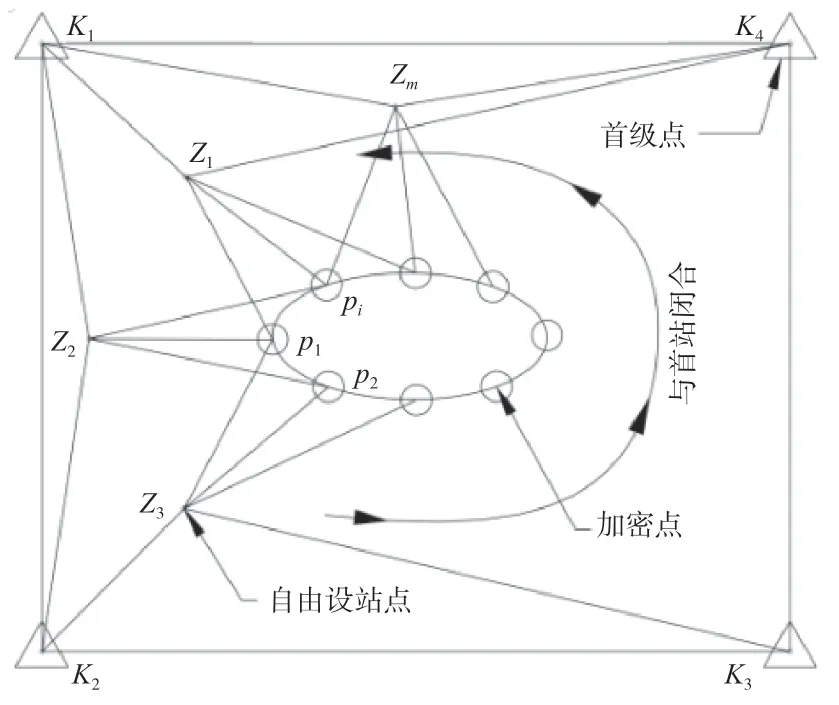
圖1 控制網觀測示意圖
1.4 數據處理模型
控制網的觀測數據分包括水平方向角、邊長和高差,為了使函數模型具有通用性,采用間接平差法,分別以待定點的坐標和高程為參數建立平面和高程平差模型。
1.4.1 平面控制平差模型
1.4.1.1 函數模型
如圖1 所示,首級平面控制為閉合導線K1-K2-K3-K4,以K1點為起算點,K1-K2為起算邊。由于首級網的點數較少、觀測條件好并采用固定棱鏡為目標,因此觀測精度容易控制,平差模型簡單。
加密網的觀測值為水平方向角Bmi和邊長Smi,函數模型的建立過程如下:1) 以自由設站點Zm為原點(0,0)建立測站坐標系Om-Xm-Ym,以起始觀測方向為坐標縱軸X方向,通過公式(1)計算Zm測站各觀測點在測站坐標系下的坐標值(Xpi,Ypi)。2) 將測站內的2 個(或以上)已知點在控制網坐標系(O-X-Y)和Om-Xm-Ym下的坐標對代入二維四參數平面坐標轉換模型(如公式(2)所示)[7],求出4 個轉換參數,即Δx、Δy、α和K(測量尺度相同時值取1),再將測站點和加密點的測站坐標代入坐標轉換模型,轉換為控制網坐標系下的近似坐標()。根據該參數計算方法建立的模型通用性強,便于編程。3) 列出每個觀測方向的坐標方位角的誤差方程(如公式(3)所示)和邊長的誤差方程(如公式(4)所示)[8]。當測站觀測方向為已知點時,公式(3)、公式(4)中的,公式(3)、公式(4)分別簡化為公式(5)、公式(6)。4) 采用近似坐標反算各觀測邊的近似方位角、近似邊長和各站的定向角(即零方向的方位角)近似值zm0,再結合邊長和角度觀測值計算誤差方程的系數和常數項。
式中:pi為控制點序號;m為自由設站序號(取1,2,…,m);i為自由設站觀測方向序號(取1,2,…,i);vmi為測站至觀測方向的坐標方位角改正數;vi為測站各觀測邊長的改正數;m為測站定向角改正數;分別為每條邊兩端點的近似坐標改正數;和均為各邊兩端點的近似坐標增量;ami、bmi為2 個系數項,;lmi為各邊的角度觀測值減去其近似值,(jm為m測站上的觀測方向數);li為各邊的邊長觀測值減去其近似值,即。
1.4.1.2 隨機模型
隨機模型主要確定角度和邊長觀測值的權比。控制網中角度和邊長觀測相互獨立,隨機模型為(σ0為單位權方差;Q為觀測向量的協因數陣;P為權陣(對角陣)),網中角度和邊長觀測數量相同,k1=k2=2m+3i個(k1為角度觀測數量;k2為邊長觀測數量;m為自由設站數;i為自由設站的觀測方向數),設總的觀測數量k=k1+k2,權陣如公式(7)所示。取測角中誤差為單位權中誤差,即,那么(σB為測角中誤差;σS為測邊中誤差;PB為角度的權;PS為邊長的權)。計算時σB、σS取全站儀的標稱精度。
將誤差方程(公式(5)、公式(6))轉換為矩陣形式,如公式(8)所示。
式中:V為方位角和邊長的改正數陣;B為系數陣;l為常數陣;為參數的改正數陣(同時包括方位角和邊長的改正數)。
將公式(8)代入公式(9),消去V,有,如公式(10)所示。
1.4.2 高程控制平差模型
1.4.2.1 函數模型
高程控制網觀測值為每個觀測方向的高差觀測值(模型設定K1點為已知點,高程為HK),平差函數模型的建立過程如下:1) 以待求點(包括自由設站點和船體加密控制點)的平差高程為參數,對應點的近似值為H0,改正數為。當推算近似高程時,先計算帶有已知點的測站,再計算相鄰測站,以此類推,計算所有點的近似高程。2) 網中共觀測n=2m+3i(n為高差觀測數;m為自由設站數;i為自由設站的觀測方向數)條邊的高差Lmi,設對應各觀測邊的高差改正數為vhmi,列出各觀測邊的觀測方程(如公式(11)所示)。當觀測方向為已知點時,i=H(ki為 各觀測點的平差高程),并入常數項lhmi(如公式(12)所示)。將公式(12)中替換為H0+,整理后得公式(13)。令lhmi=Lmi+Hm0-Hi0(Lmi為各邊的高差觀測值;Hm0為自由設站點的高程近似值;Hi0為觀測方向點的高程近似值),得到誤差方程(如公式(14)所示)。3) 根據觀測值和高程近似值,計算誤差方程常數項。
1.4.2.2 隨機模型
因為控制網中各觀測高差為同精度獨立觀測值,所以按照觀測邊長進行定權Pmi=C/Smi(C為設定的單位權觀測邊長,試驗模型中C=0.2 km),得到觀測值的權陣P(P為n行n列的對角陣)。將誤差方程轉換為矩陣形式(如公式(8)所示),將系數陣B、常數陣l和權陣P帶入公式(10),求出參數的改正數陣,即各點近似高程的改正數,再將代入誤差方程,計算各邊的高差觀測值的改正數vhmi。
2 試驗結果分析
當進行數據平差時,對比平面控制的2 種平差方式。一種是按照整網平差,即只保留自由設站網,以2 個已知點為起算進行平差。當計算近似坐標時,從帶有已知起算點的測站開始,根據上述近似坐標計算方法計算各點的近似坐標,再依次在各測站數據中查找在首站中有3 個以上公共觀測點的測站,并以這些公共觀測點為重合點計算轉換參數,完成這些相鄰測站的坐標轉換。以此類推,直到完成所有測站的近似坐標計算。另一種是根據首級網和加密網分級平差。地面首級網嚴密平差結果為方位角閉合差0.4″,坐標閉合差0.7 mm,相對精度為1/330000,最弱點點位中誤差0.2 mm。2 種方式的平差結果對比見表1。高程控制按整網平差結果如下:最弱點高程中誤差為0.15 mm,最弱測段高差中誤差為0.16 mm,根據閉合環(huán)統(tǒng)計的測站高差中誤差為0.17 mm。
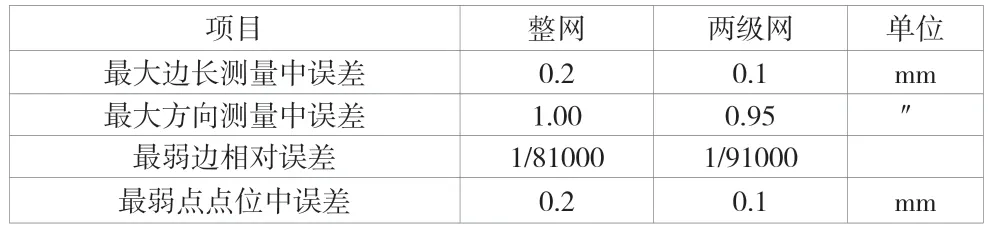
表1 2 種方式平差結果對比
根據試驗結果可知,基于自由設站法并使用TS60 全站儀和精密靶球構建的三維控制網在試驗模型下的優(yōu)勢如下:1) 觀測數據質量穩(wěn)定,成果精度高,平面和高程平差結果均比設計精度高。2) 平面控制網2 種方式的平差結果均滿足設計精度。3) 平面控制按照兩級網進行平差后,總體精度更高,點位中誤差可以滿足一級精密工程控制網的精度要求(相鄰點相對點位中誤差為0.2 mm)。4) 高程控制網可以達到較高的精度,可以滿足四級精密高程控制網的精度要求(測站高差中誤差為0.30 mm)。
試驗中最弱邊和方向測量中誤差較大的邊主要是部分短邊(邊長小于10 m),因此,在實際應用中應盡量注意避免出現超短邊,以獲取更可靠、精度更高的觀測數據。模型中首級網應盡量布設為網狀,如果因條件受限無法將首級網布設為網狀,那么應盡量減少導線點數量,以提高首級網的可靠性。在滿足精度要求的前提下,可以采用整網平差代替兩級網,以提高作業(yè)效率、降低作業(yè)成本。在試驗中觀測數量為2 個測回,采用適當增加測回數的方法可以進一步提高控制網的質量。試驗中測量船舶為鋼鐵結構,測量時間為夏季,雖然選擇在溫度變化較小的夜間進行作業(yè),但是其溫度變化也達到3 ℃左右。船體控制點受熱脹冷縮影響較大,這也是產生測量誤差的一個主要因素,在實際應用中不能忽略。試驗中對此進行驗證,針對同一點位的坐標,采用同樣的儀器和觀測方法,坐標較差會超過1 cm,甚至更大,并且日間作業(yè)大氣環(huán)境的變化較大,對全站儀觀測數據質量也有較大影響。因此在實際應用中應充分考慮環(huán)境因素的綜合影響,作業(yè)前宜使用精密幾何水準對所使用的全站儀在實際作業(yè)場景條件(大氣環(huán)境、視線長度以及垂直角等)下的三角高程測量精度進行驗證。
3 結語
該文通過自由設站法構建的三維控制網以高精度的全站儀和靶球配合測量,可以為船舶測量,特別是船舶上安裝在不同部位的精密設備相對定位提供精度較高的三維參考基準,并且以靶球中心為控制點可以直接與激光跟蹤儀進行銜接,完成精密設備的安裝、校準、定位和姿態(tài)測量工作。控制網以自由設站法進行觀測,測站點是以儀器中心為控制點,避免了對中誤差帶來的精度損失。照準點以精密靶球中心為控制點,重復安置和照準精度高,無須量取儀器高和覘標高,可以提高高程控制的精度。該三維控制測量和平差模型具有精度高、布設靈活、作業(yè)簡便和效率高等優(yōu)勢,可以為同類型精密工程測量的應用提供參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03