深水海底連續(xù)管鉆機起升系統(tǒng)設(shè)計與仿真研究
2024-01-01 00:00:00朱再思劉平國劉廣斗張富強付成振展緒魯
石油礦場機械 2024年6期

摘 "要:以深水連續(xù)管鉆機為對象,針對連續(xù)管鉆機不能下套管的問題,設(shè)計了一種以液壓絞車、鋼絲繩和滑輪組合且與連續(xù)管鉆機集成的起升系統(tǒng)。該系統(tǒng)在保證深水連續(xù)管鉆井作業(yè)的同時,還能夠?qū)崿F(xiàn)下套管作業(yè)。構(gòu)建了起升系統(tǒng)的三維模型,建立了深水連續(xù)管鉆機的作業(yè)流程;給出了關(guān)鍵部件的設(shè)計參考并進行驗證,以保證系統(tǒng)的安全性;并針對不同作業(yè)工況,基于ADAMS進行了起升系統(tǒng)的動力學(xué)仿真,分析了連續(xù)管鉆機的運動特性及鋼絲繩的受力,驗證了起升系統(tǒng)的運動和動力學(xué)特性。設(shè)計的深水連續(xù)管鉆機起升系統(tǒng)具有結(jié)構(gòu)緊湊、連續(xù)起下的特點,相比傳統(tǒng)鉆機在深水淺層作業(yè)時更有優(yōu)勢,對后續(xù)深水鉆機的研究具有實際意義和參考價值。
關(guān)鍵詞:水下作業(yè);連續(xù)管鉆機;起升系統(tǒng);有限元分析;動力學(xué)仿真
中圖分類號:TE923 " " " " 文獻標(biāo)志碼:A " " " doi:10.3969/j.issn.1001-3482.2024.06.007
Design and Simulation of the Hoisting System of Coiled Tubing Drilling Rigs for
Underwater Operations
ZHU Zaisi1,LIU Pingguo1,LIU Guangdou2,ZHANG Fuqiang1,F(xiàn)U Chengzhen2,ZHAN Xulu2
(1.Jianghan Machinery Research Institute Limited Company of CNPC,Wuhan 430023,China; 2.College of Mechanical and Electrical Engineering, China University of Petroleum,Qingdao 266555,China)
Abstract:In order to address the issue of the inability of the coiled tubing drilling rig to lower the casing, a hoisting system was designed which integrates hydraulic winches, wire ropes, and pulleys with the coiled tubing drilling rig. The system is capable of ensuring the successful completion of underwater drilling operations while simultaneously facilitating the requisite casing operations. A three-dimensional model of the hoisting system has been constructed. The operational process of the underwater coiled tubing drilling rig has been established. The design of the system's critical components was provided and verified to ensure the safety of the overall system. A dynamic simulation of the lifting system was conducted based on ADAMS for a variety of operating conditions. The motion characteristics of the coiled tubing drilling rig and the stress on the steel wire rope were analyzed. The motion and dynamic characteristics of the hoisting system were verified. The designed underwater coiled tubing drilling rig has the characteristics of a compact structure and continuous lifting, which are advantageous in deepwater and shallow operations compared to traditional drilling rigs. It has practical significance and reference value for future research on underwater operation drilling rigs..
Key words: underwater operations; coiled tubing drilling rig; hoisting system; finite element analysis; dynamics simulation
隨著陸地油氣資源開采力度的日漸加大和油氣儲量的不斷減少,占全球資源總量約34%的海洋石油資源已成為關(guān)注的焦點和新一輪油氣勘探開發(fā)的熱點。其中,開發(fā)和擁有先進的海洋石油裝備是開發(fā)海洋油氣資源的有力保障和重要標(biāo)志[1]。天然氣水合物(可燃冰)是高效清潔的石油、天然氣戰(zhàn)略性替代能源,水下天然氣水合物存在于水深大、井深淺的環(huán)境中,使用海上鉆采平臺進行開發(fā)時成本高昂,經(jīng)濟性差[2]。具備水下作業(yè)的鉆完井設(shè)備可以節(jié)省成本、避免海洋環(huán)境和惡劣天氣對鉆井作業(yè)的干擾,因此提出了海底鉆機的概念,并且受到越來越多的關(guān)注和研究[3]。目前已有多家國外公司參與研究,并提出了多種方案,如挪威Robotic Drilling System AS公司和英國Maris International公司的海底鉆機和Maris International公司提出的海底概念鉆機。國內(nèi)有湖南科技大學(xué)的“海牛”號深水鉆機[4]。但國內(nèi)外已有海底鉆機均用于海洋地質(zhì)科考作業(yè),亟需研制用于工程開發(fā)的海底鉆井系統(tǒng)。
連續(xù)管鉆機具有結(jié)構(gòu)緊湊、連續(xù)起下的特點,節(jié)省了拆卸鉆桿及下放、回收水下器具等作業(yè)時間,能大幅提高作業(yè)效率[5]。結(jié)合海底鉆機的概念,把連續(xù)管鉆機置于海底,省去水面平臺和隔水系統(tǒng),利用柔性臍帶纜進行動力輸送和監(jiān)視、遙控鉆機進行鉆完井作業(yè),適應(yīng)環(huán)境能力強,因此連續(xù)管鉆機與水下作業(yè)聯(lián)合,構(gòu)建海底鉆井裝備,從而降低海底鉆井作業(yè)復(fù)雜性、減小作業(yè)費效比、提高作業(yè)效率,是實現(xiàn)深水海底淺層鉆井的關(guān)鍵裝備。
由于連續(xù)管鉆機不能下套管,需要依靠常規(guī)鉆機進行下套管、油管等作業(yè)。若采用將連續(xù)管鉆機與可移動式井架結(jié)合在一起的混合型裝備進行作業(yè),需井架可移動且?guī)聿簧俳?jīng)濟及技術(shù)方面的新問題。而起升系統(tǒng)作為石油鉆機的核心,其主要作用是在鉆井過程中提升和下放鉆柱、控制鉆頭施加在井底的鉆壓、下放加固井壁的套管及其他輔助作業(yè)[6]。因此,亟需設(shè)計一種與連續(xù)管鉆機適配的起升系統(tǒng)。
絞車式起升系統(tǒng)較為傳統(tǒng),技術(shù)成熟,使用率較高,主要由井架、游動系統(tǒng)、絞車等組成[7],有單絞車和雙絞車提升兩種型式。絞車?yán)p繞鋼絲繩,鋼絲繩通過天車和游動滑車組成的滑輪組,帶動大鉤起升或下放管柱[8],這種傳統(tǒng)的起升系統(tǒng)存在機構(gòu)復(fù)雜、拆裝運移困難等缺點。液壓式起升系統(tǒng)較為先進[9],使用率較低,主要由液壓缸、井架、游動滑車等組成,沒有動定滑輪之間的鋼絲繩纏繞,系統(tǒng)的繩系效率很高。但是系統(tǒng)的設(shè)備較精密,對環(huán)境要求較高,技術(shù)先進,研發(fā)成本較高。多功能齒條齒輪石油鉆機[10]應(yīng)用齒條齒輪技術(shù)代替起升系統(tǒng)進行起下鉆具,具有結(jié)構(gòu)緊湊、承載能力大、噪聲小等特點,缺點是傳動機構(gòu)安裝精度要求較高,加工制造成本較高。如TTS Sense公司鉆機采用交流變頻電動機驅(qū)動,動作時電動機固定不動,齒條鏈移動;Max Streicher公司采用液壓馬達驅(qū)動,動作時馬達固定不動,齒輪在齒條上做升降運動;American Augers公司采用液壓馬達驅(qū)動,動作時齒條齒輪固定,液壓馬達帶動頂驅(qū)在齒條齒輪上做升降運動。
綜合考慮操作空間、實現(xiàn)難度和經(jīng)濟性等方面,絞車式起升系統(tǒng)技術(shù)成熟、結(jié)構(gòu)簡單、易維護,因此進行了水下作業(yè)連續(xù)管鉆機絞車式起升系統(tǒng)設(shè)計,以實現(xiàn)連續(xù)管鉆機水下鉆完井作業(yè)全流程的需要。
1 總體設(shè)計方案
起升系統(tǒng)要求與連續(xù)管鉆機相結(jié)合,參考傳統(tǒng)鉆機的絞車式起升系統(tǒng),起升系統(tǒng)帶動頂驅(qū)的升降實現(xiàn)起下鉆、下套管、油管等鉆完井作業(yè)。因此,方案的設(shè)計思路是用注入頭替代頂驅(qū),保證連續(xù)管鉆機的注入頭與井口對中,實現(xiàn)鉆井作業(yè);通過起升系統(tǒng)帶動注入頭的升降實現(xiàn)下套管作業(yè)。
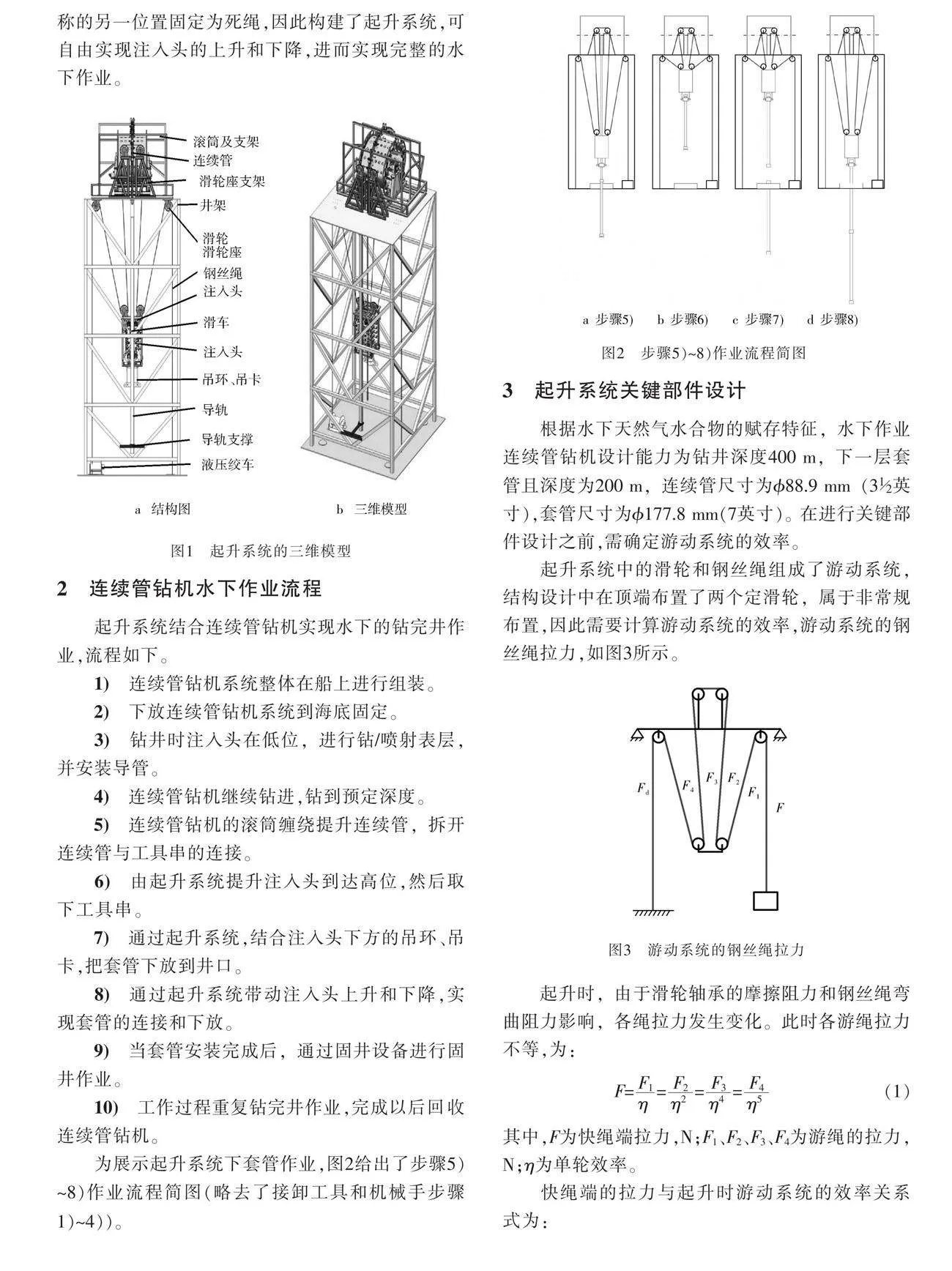
水下作業(yè)連續(xù)管鉆機的起升系統(tǒng)的三維模型,如圖1所示。起升系統(tǒng)主要由井架、液壓絞車、吊環(huán)、吊卡、鋼絲繩、滑輪、支座、導(dǎo)軌和滑車等組成。其中,連續(xù)管鉆機的滾筒安裝在井架的頂端,注入頭通過滑車與導(dǎo)軌連接,保證與井口的位置。由于注入頭中心區(qū)域需要通過連續(xù)管,因此鋼絲繩需要避開中間區(qū)域,不干涉鉆井作業(yè),滑輪組的布置也與傳統(tǒng)游車、滑車不同。為方便安裝和維護,在最上端安裝兩個定滑輪,且要高于滾筒的排管口,井架頂板下表面安裝兩個定滑輪,注入頭上表面安裝兩個動滑輪。由于在水下作業(yè),因此選用液壓絞車作為驅(qū)動。鋼絲繩由液壓絞車出發(fā),在通過滑輪組之后,在絞車對稱的另一位置固定為死繩,因此構(gòu)建了起升系統(tǒng),可自由實現(xiàn)注入頭的上升和下降,進而實現(xiàn)完整的水下作業(yè)。
2 連續(xù)管鉆機水下作業(yè)流程
起升系統(tǒng)結(jié)合連續(xù)管鉆機實現(xiàn)水下的鉆完井作業(yè),流程如下。
1) 連續(xù)管鉆機系統(tǒng)整體在船上進行組裝。
2) 下放連續(xù)管鉆機系統(tǒng)到海底固定。
3) 鉆井時注入頭在低位,進行鉆/噴射表層,并安裝導(dǎo)管。
4) 連續(xù)管鉆機繼續(xù)鉆進,鉆到預(yù)定深度。
5) 連續(xù)管鉆機的滾筒纏繞提升連續(xù)管,拆開連續(xù)管與工具串的連接。
6) 由起升系統(tǒng)提升注入頭到達高位,然后取下工具串。
7) 通過起升系統(tǒng),結(jié)合注入頭下方的吊環(huán)、吊卡,把套管下放到井口。
8) 通過起升系統(tǒng)帶動注入頭上升和下降,實現(xiàn)套管的連接和下放。
9) 當(dāng)套管安裝完成后,通過固井設(shè)備進行固井作業(yè)。
10) 工作過程重復(fù)鉆完井作業(yè),完成以后回收連續(xù)管鉆機。
為展示起升系統(tǒng)下套管作業(yè),圖2給出了步驟5)~8)作業(yè)流程簡圖(略去了接卸工具和機械手步驟1)~4))。
3 起升系統(tǒng)關(guān)鍵部件設(shè)計
根據(jù)水下天然氣水合物的賦存特征,水下作業(yè)連續(xù)管鉆機設(shè)計能力為鉆井深度400 m,下一層套管且深度為200 m,連續(xù)管尺寸為?準(zhǔn)88.9 mm(3英寸),套管尺寸為?準(zhǔn)177.8 mm(7英寸)。在進行關(guān)鍵部件設(shè)計之前,需確定游動系統(tǒng)的效率。
起升系統(tǒng)中的滑輪和鋼絲繩組成了游動系統(tǒng),結(jié)構(gòu)設(shè)計中在頂端布置了兩個定滑輪,屬于非常規(guī)布置,因此需要計算游動系統(tǒng)的效率,游動系統(tǒng)的鋼絲繩拉力,如圖3所示。
從上述式(1)~(7)效率的表達式可以看出,起升和下放時游動系統(tǒng)的效率是不同的。通過分析可知,起升和下放時的游動系統(tǒng)效率數(shù)值相差不大,因此在設(shè)計部件時,認為起升和下放的游動系統(tǒng)效率是一致的。
分析可知,起升系統(tǒng)中關(guān)鍵部件可以分為兩類:第一類為選型設(shè)計類部件,如鋼絲繩、滑輪等;第二類為力學(xué)校核類部件,如滑輪底座、支架、導(dǎo)軌等。
3.1 選型設(shè)計類部件
1) 鋼絲繩選型設(shè)計。
鋼絲繩所提升的最大載荷包含了水下注入頭、套管、吊卡、吊環(huán)、滑輪底座和鋼絲繩等質(zhì)量產(chǎn)生的重力,約為180 kN。采用安全系數(shù)法對鋼絲繩直徑進行選型,對運動繩和靜態(tài)繩都適用。鋼絲繩拉力的計算式如下:
式中:FS為鋼絲繩的拉力,kN;G為鋼絲繩所提升負載荷的總重力,kN。
選用鋼絲繩的最小破斷拉力應(yīng)該大于鋼絲繩受的拉力與安全系數(shù)的乘積。根據(jù)《油田用鋼絲繩的應(yīng)用、維護和使用》[11],考慮海底工況,取安全系數(shù)為4。根據(jù)《鋼絲繩規(guī)范》[12],最終選用?準(zhǔn)18-1960級(6×19S-IWRC-1960)鋼芯鋼絲繩。
2) 滑輪選型設(shè)計。
根據(jù)《鉆井和采油提升設(shè)備規(guī)范》[13],槽底半徑為:最小槽底半徑為鋼絲繩公稱半徑的106%,最大槽底半徑為鋼絲繩公稱半徑的110%。滑輪繩槽的高度在1.33d~1.75d之間,滑輪底徑的計算公式為:
DT=d×K(9)
式中:DT為滑輪底徑,mm;d為鋼絲繩公稱直徑,mm;K為滑輪直徑系數(shù),取值為30。
滑輪相關(guān)參數(shù)尺寸為:槽底半徑9.9 mm,繩槽兩側(cè)面夾角30°,底徑?準(zhǔn)540 mm,外徑?準(zhǔn)600 mm,槽高30 mm,槽寬38 mm,輪緣寬53 mm。根據(jù)《鉆井和采油提升設(shè)備規(guī)范(PSL1和PSL2)》[14]滑輪標(biāo)記為:HL CO 30.0 API Spec 8C 600。
3.2 力學(xué)校核類部件
1) 滑輪底座和支架設(shè)計。
滑輪底座承受滑輪的反力,施加最大載荷下豎直方向上的拉力,得到滑輪底座的應(yīng)力云圖如圖4所示,最大應(yīng)力產(chǎn)生在肋板與上端連接處為34.46 MPa,小于材料的屈服強度,滑輪底座的強度符合要求。
對滑輪底座支架的頂部兩個面分別施加的最大載荷下的壓力,得到應(yīng)力云圖,如圖5所示,最大應(yīng)力產(chǎn)生在支架頂部為161.6 MPa,小于材料的屈服強度,滑輪底座支架的強度符合要求。
2) 導(dǎo)軌設(shè)計。
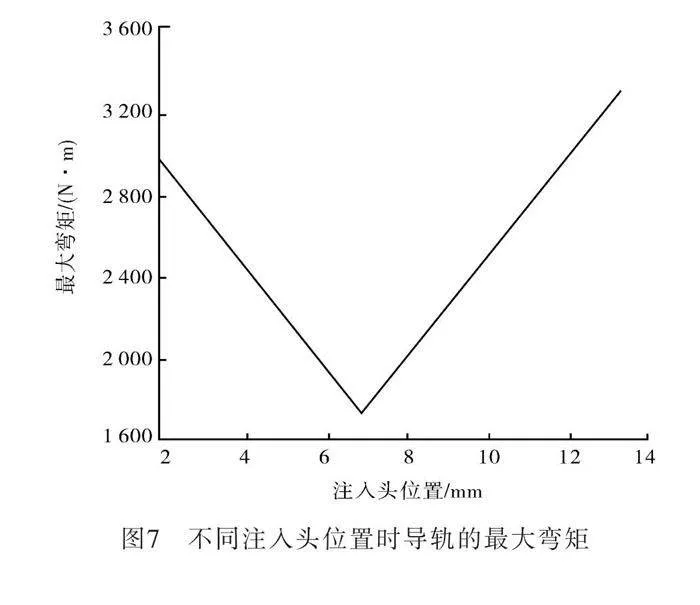
導(dǎo)軌和滑車一起限定了注入頭的垂直移動,但是起重物體的重心與幾何中心通常不在同一位置,導(dǎo)軌將會承受彎矩產(chǎn)生的彎曲變形,如果導(dǎo)軌變形量過大就會導(dǎo)致注入頭與井口中心不對中。因此,需對導(dǎo)軌進行應(yīng)力和變形分析[15]。
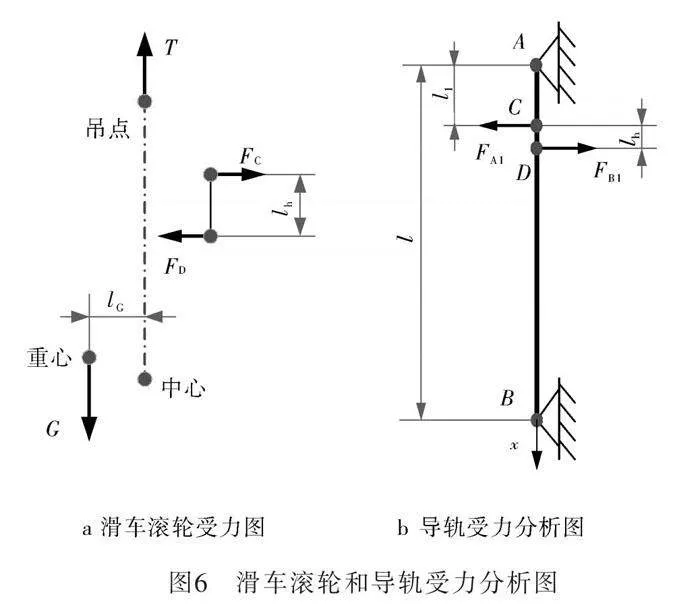
滑車滾輪和導(dǎo)軌的受力分析如圖6所示。其中,左圖FC、FD是導(dǎo)軌對滑車滾輪的作用力,由G為最大載荷,T為起升系統(tǒng)的拉力,lG為起重物重心與中心之間的水平距離,lh為滑車上下滾輪的垂直距離,因此可以通過力系平衡求得FC、FD、FA1、FB1為滑車滾輪對導(dǎo)軌的作用力,與FA、FB互為作用力,l為導(dǎo)軌長度,l1為滑車上滾輪與導(dǎo)軌支撐點的距離,表示注入頭在導(dǎo)軌的位置。
進行應(yīng)力分析時,導(dǎo)軌可看成等截面細長梁,主要考慮彎矩的影響,由圖6可以得到導(dǎo)軌各截面的彎矩方程。為更準(zhǔn)確分析導(dǎo)軌的應(yīng)力,以l1為變量,計算注入頭在導(dǎo)軌不同位置的最大彎矩值,由于導(dǎo)軌截面采用對稱結(jié)構(gòu),最大彎矩值以絕對值表示,如圖7所示。當(dāng)注入頭位于導(dǎo)軌下部極限位置時產(chǎn)生最大彎矩為3 340.4 N·m,此時的彎曲正應(yīng)力為11.26 MPa,遠小于許用強度,強度滿足要求。
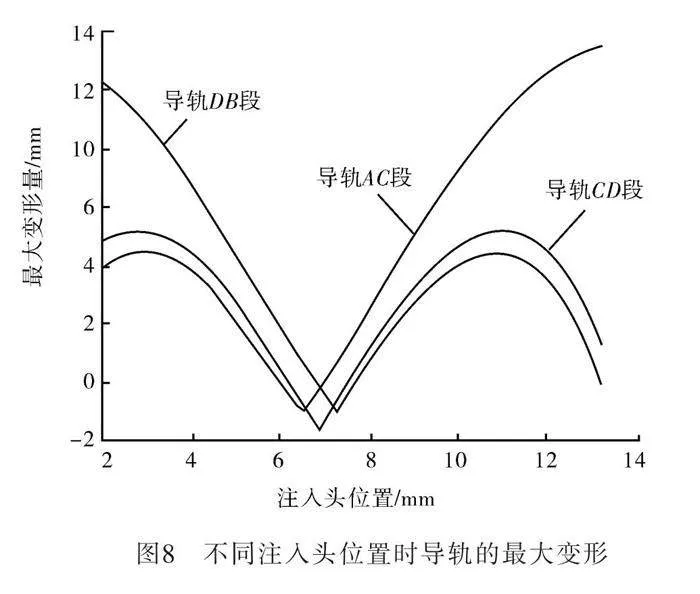
進行變形分析時,應(yīng)用疊加法得到導(dǎo)軌各截面的撓曲線方程。同樣以l1為變量,計算注入頭在導(dǎo)軌不同位置的最大變形量,最大變形值以絕對值表示,如圖8所示。當(dāng)注入頭位于導(dǎo)軌下部極限位置時AC段產(chǎn)生最大變形量為13.55 mm,此時整個導(dǎo)軌的變形率為0.097%,變形滿足要求。
4 仿真研究
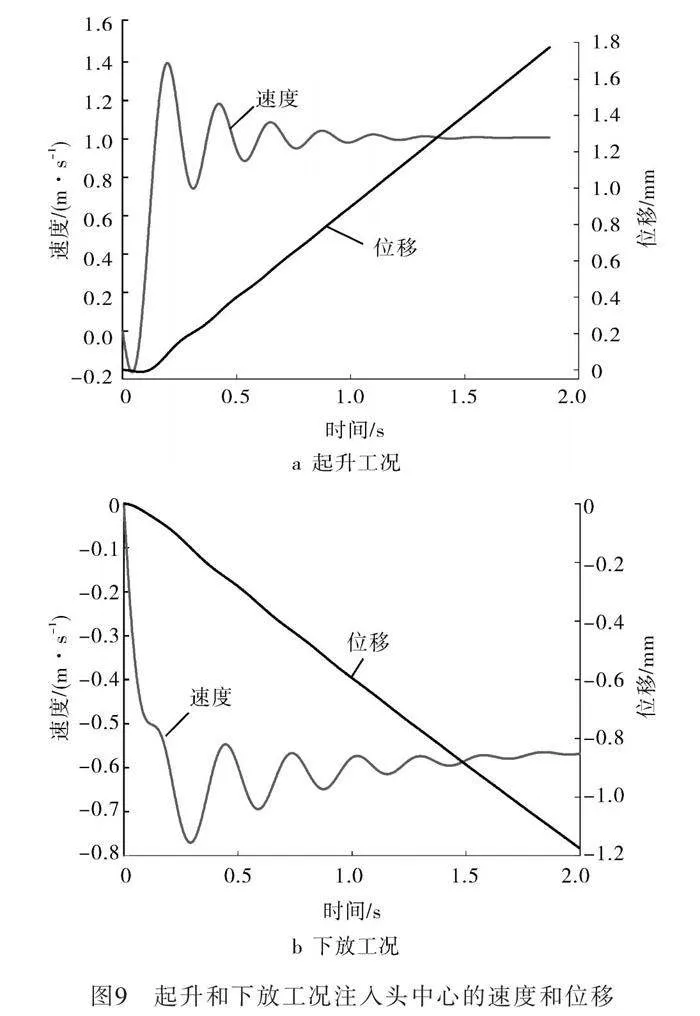
注入頭和鋼絲繩的動力學(xué)特性對起升系統(tǒng)的工作性能起著至關(guān)重要的作用。基于起升系統(tǒng)部件的設(shè)計,應(yīng)用ADAMS軟件對起升系統(tǒng)進行動力學(xué)仿真研究,驗證起升系統(tǒng)的運動與鋼絲繩的受力。根據(jù)工作流程,分析起升系統(tǒng)的空載起升和最大載荷下放兩種工況,設(shè)定起升時速度為1 m/s,鋼絲繩驅(qū)動端速度為注入頭速度的Z(鋼絲繩有效繩數(shù))倍,則驅(qū)動速度為4 m/s,且驅(qū)動速度在初始0~0.2 s加速階段從0加速到設(shè)定起升速度;設(shè)定下放時速度為0.5 m/s,驅(qū)動速度為2.0 m/s。
由于導(dǎo)軌和滑車的存在,限定了注入頭的左右和前后的位移,因此在分析速度和位移時,只需分析上下方向的速度和位移。得到起升和下放工況注入頭中心的運動速度和位移曲線,如圖9所示,速度曲線平滑穩(wěn)定,無明顯的突變點。速度在初始階段產(chǎn)生振蕩,隨著時間的增長,很快趨于穩(wěn)定,并保持在驅(qū)動速度的1/4左右;位移曲線同樣平滑穩(wěn)定,并隨時間呈線性增長且近似斜直線,從而驗證了該起升系統(tǒng)的運動特性。對于速度初始階段產(chǎn)生較大振蕩的問題,原因是驅(qū)動速度的加速過快,可以通過延長加速階段的時間來改善。
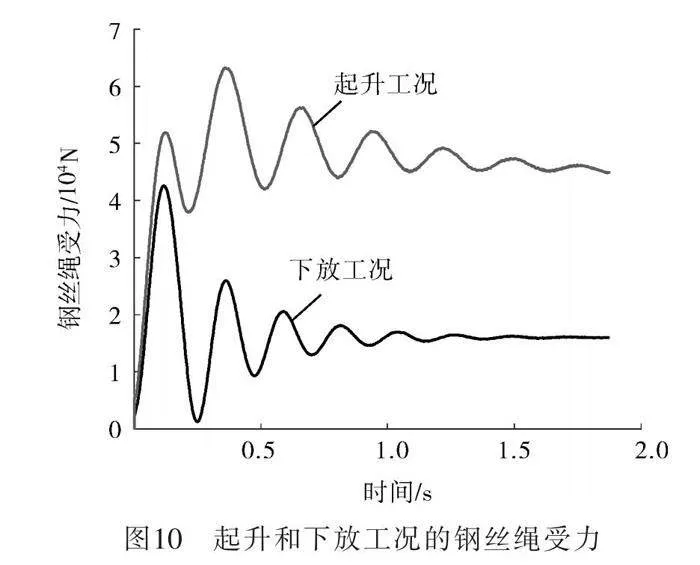
起升和下放工況的鋼絲繩受力曲線如圖10所示。兩條曲線平滑無突點,起步階段與注入頭速度相應(yīng),存在振蕩,同理可以通過延長加速階段的時間
來改善,曲線很快進入平穩(wěn)階段。在仿真時忽略了滑輪的效率,根據(jù)游動系統(tǒng)的分析,穩(wěn)定階段的鋼絲繩受力應(yīng)為起重力的1/4,可以看出與圖10中的受力分析是相符的。下放工況為最大載荷情況,承受的穩(wěn)定拉力約為47.52 kN,小于安全系數(shù)為4的鋼絲繩可承受拉力,同時在加速階段的最大拉力也保持安全系數(shù)在3.5以上,因此鋼絲繩的強度符合要求。
5 結(jié)論
1) 設(shè)計了一種與水下作業(yè)連續(xù)管鉆機適配的起升系統(tǒng),與連續(xù)管鉆機高度集成,水下作業(yè)環(huán)境適應(yīng)性強,實現(xiàn)了注入頭的上升和下降,進而實現(xiàn)水下鉆完井作業(yè)全過程。
2) 確立了起升系統(tǒng)的總體方案,并建立三維模型,設(shè)計了水下的鉆完井作業(yè)流程。
3) 分析了非常規(guī)滑輪布置的游動系統(tǒng)效率,根據(jù)特點分為選型設(shè)計和力學(xué)校核類部件,進而設(shè)計得到關(guān)鍵部件的結(jié)構(gòu)參數(shù),并驗證了關(guān)鍵部件的安全性。
4) 根據(jù)關(guān)鍵部件設(shè)計構(gòu)建了仿真模型,結(jié)合流程分析確立了仿真工況,得到了注入頭的速度、位移和鋼絲繩的受力圖形,進而驗證了起升系統(tǒng)的運動特性和動力學(xué)特性。
5) 該起升系統(tǒng)的設(shè)計,為水下作業(yè)連續(xù)管鉆機提供了新的研究思路,對水下天然氣水合物開發(fā)工具設(shè)計具有參考意義。
參考文獻:
[1] 趙濤,黃元元,賈向鋒,等.我國海洋油氣鉆井裝備技術(shù)現(xiàn)狀及展望[J].石油機械, 2022, 50(4): 56-62.
[2] 王定亞,朱安達. 海洋石油裝備現(xiàn)狀分析與國產(chǎn)化發(fā)展方向[J].石油機械, 2014, 42(3): 33-37.
[3] 張漢泉,陳奇,萬步炎,等. 海底鉆機的國內(nèi)外研究現(xiàn)狀與發(fā)展趨勢[J]. 湖南科技大學(xué)學(xué)報(自然科學(xué)版),2016,31(1):1-7.
[4] 王敏生,黃輝.海底鉆機及其研究進展[J].石油機械, 2013, 41(5): 105-110.
[5] 張帥,張燕萍,郭慧娟.國內(nèi)外連續(xù)管鉆井技術(shù)發(fā)展現(xiàn)狀[J].石油礦場機械, 2019, 48(6): 77-82.
[6] 劉勤志,張國田,王娜,等.鉆井下套管工藝的發(fā)展研究 [J].機械制造, 2013, 51(1): 57-60.
[7] 林葦. 超深井鉆機絞車提升系統(tǒng)研究[D].長春:吉林大學(xué), 2013.
[8] 鄭黎明,李彥霖,張洋洋,等.智能鉆機與傳統(tǒng)鉆機系統(tǒng)組成差異與發(fā)展分析[J].石油機械,2023,51(11):41-50.
[9] 宋超,崔曉偉,鄭曉東,等.石油鉆機提升系統(tǒng)分析與應(yīng)用[J].機械研究與應(yīng)用, 2018, 31(5): 69-71.
[10] 王宏偉,劉繼亮,張潤松,等.國外多功能齒條齒輪鉆機技術(shù)現(xiàn)狀[J].石油礦場機械, 2011, 39(9): 23-26.
[11] API.Application, Care, and Use of WireRope for Oil Field Service:API RP 9B[S].Washington,DC:American Petroleum Institute,2011.
[12] API.Specification for Wire Rope:API Spec 9A[S].Washington,DC:American Petroleum Institute,2020.
[13] API.Specification for Drilling andProduction Hoisting Equipment:API Spec 8A[S].Washington,DC:American Petroleum Institute,1997.
[14] API.Drilling and Production HoistingEquipment(PSL 1 and PSL 2):API Spec 8C[S].Washington,DC:American Petroleum Institute,2012.
[15] 張曉晴,張紅,楊怡,等.材料力學(xué)[M].北京:機械工業(yè)出版社, 2021: 87-151.