一種海洋重力擾動矢量水平分量的計算方法
2024-01-02 11:16:20蔡體菁
壓電與聲光 2023年6期
蔡體菁,王 薇
(東南大學 儀器科學與工程學院,江蘇 南京 210096)
0 引言
在捷聯式重力矢量測量中,重力擾動矢量由重力儀中3個相互正交的加速度計輸出所得,其輸出包括重力矢量、載體運動加速度和加速度計偏差。在捷聯慣導系統/全球導航衛星系統(SINS/GNSS)組合系統的卡爾曼濾波中,加速度計偏差和姿態誤差在估計過程中是耦合的,不易區分[1]。在重力矢量測量中,分離重力擾動矢量水平分量和誤差需額外測量或引入額外假設[2-4]。因此,本文提出了一種重力擾動矢量水平分量估計的兩步法,將重力擾動矢量水平分量估計與慣導誤差估計解耦。擴展卡爾曼濾波算法用于加速度計偏差和姿態誤差角的估計和補償,以得到計算地理坐標系下的比力。再利用精確估計的加速度計偏差和姿態角誤差,建立重力擾動矢量水平分量的計算方程,從而得到當地地理坐標系下的比力。在此基礎上,將重力擾動矢量水平分量用二階馬爾可夫隨機過程描述,將其與加速度計的偏差分離,利用正向-平滑卡爾曼濾波估算地理坐標系與真實的當地地理坐標系間的誤差角,從而準確估計重力擾動矢量水平分量。
1 比力計算
為了獲得當地地理坐標系下的重力擾動矢量,需要精確的東向、北向和天向比力,以及精確的姿態誤差角。從GNSS基站和移動站傳遞來的原始數據經過差分計算后,可得到速度和位置信息。因此,基于SINS/GNSS組合系統的狀態和量測方程,SINS的加速度計偏差和姿態誤差角可通過高精度捷聯慣導算法和閉環擴展卡爾曼濾波精確確定,且在誤差補償后,可得到東、北、天向的比力。
以慣導誤差和重力矢量儀器件誤差為狀態量,建立SINS/GNSS組合系統的狀態方程,狀態向量為
X=[φE,φN,φU,δvE,δvN,δvU,δL,δλ,δh,
(1)

SINS/GNSS組合系統的量測向量為
(2)

2 重力擾動矢量水平分量的計算方程
由于陀螺儀精度的影響,根據SINS/GNSS組合系統計算得到的比力是相對于計算地理坐標系的,該坐標系和真實地理坐標系間存在很小的角度誤差,因此,重力擾動矢量的水平分量不能由比力計算的結果直接獲得。進一步補償姿態誤差,可獲得高精度的重力擾動矢量的水平分量。
由于加速度計偏差和重力擾動矢量水平分量難以區分,重力擾動矢量水平分量無法在卡爾曼濾波器中估計,為此建立重力擾動矢量水平分量的隨機模型,從而將重力擾動矢量水平分量與加速度計偏差區分,在誤差方程中估計重力擾動矢量水平分量。
引入計算地理坐標系和真實地理坐標系之間的姿態誤差角φn=[φEφNφU]T,這兩個坐標系下比力的關系為
(3)
根據姿態誤差微分方程,SINS的姿態誤差角方程為
(4)
式中:ωE,ωN,ωU為當地地理坐標系相對于慣性坐標系的旋轉角速度在其坐標軸上的投影;εE,εN,εU為重力矢量儀在當地地理坐標系下的等效陀螺漂移。
在當地地理坐標系下,重力擾動矢量的水平分量的計算方程[5-6]為
(5)
重力擾動矢量的水平分量通過一個二階高斯-馬爾可夫隨機過程表示,其狀態方程為
(6)
式中:β為重力相關參數;pE,pN為中間變量;qE,qN分別為當地地理坐標系的東向和北向的重力擾動矢量噪聲。
根據方程(1)-(6)可推得重力擾動矢量的狀態方程組,并且狀態向量為
X=[φE,φN,φU,δvE,δvN,ΔgE,pE,
ΔgN,pN]T
(7)
利用正向-平滑卡爾曼濾波器計算重力擾動矢量水平分量,首先使用正向卡爾曼算法進行預測和估計,再使用Rauch-Tung-Striebel (RTS)固定區間平滑算法進行反向平滑,RTS固定區間平滑算法的步驟為
(8)

3 實驗結果

對此次船載海洋重力測量數據進行了海洋重力擾動水平分量計算,截取東西方向和南北方向的重復測線各兩條,兩組重復測線的軌跡如圖1、2所示。艦船航行的平行速度為3 m/s,重力矢量儀的輸出頻率為200 Hz,GNSS的輸出頻率為2 Hz,采用差分GNSS獲得位置和速度信息。
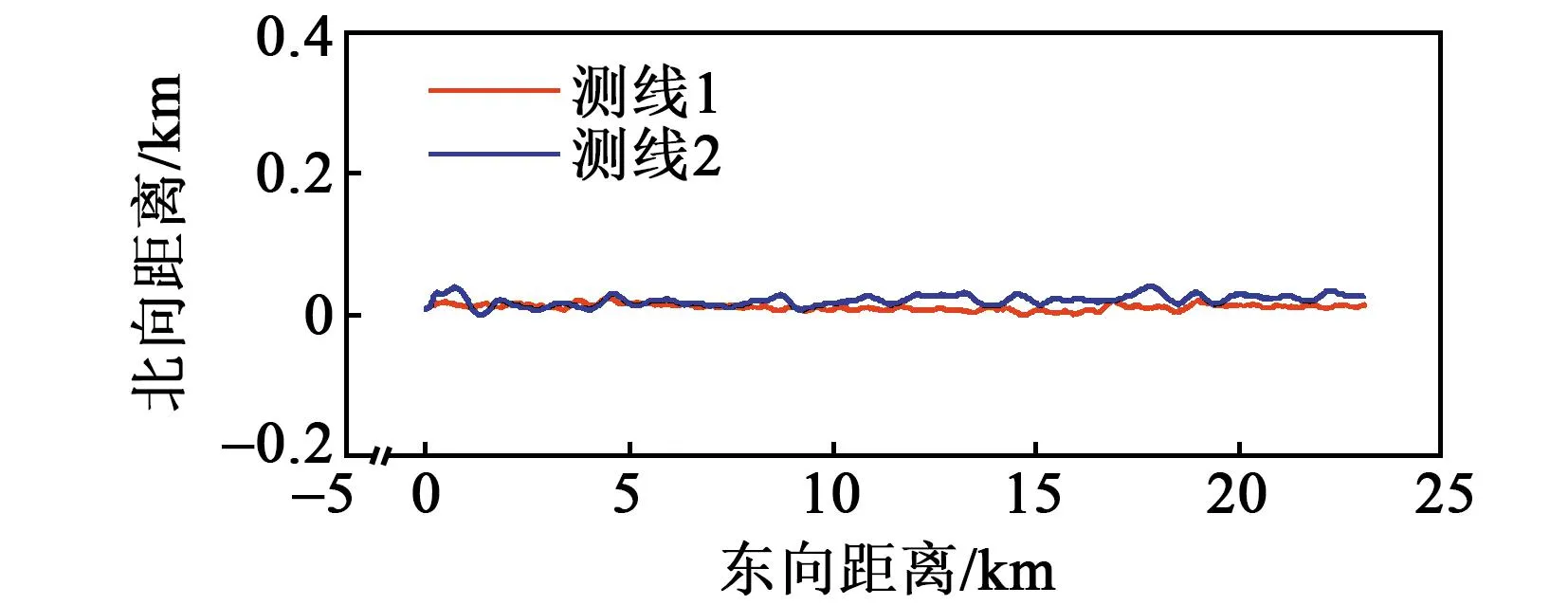
圖1 東西向測線軌跡

圖2 南北向測線軌跡
兩條東西向測線的重力擾動矢量水平分量計算結果如圖3、4所示。由圖可知,艦船在東西方向航行時,兩條測線的東向、北向重力擾動重合情況較好,兩條測線上的重力擾動水平分量存在的偏差在允許范圍內,因此認為水平重力擾動能夠從速度誤差中分離出來。
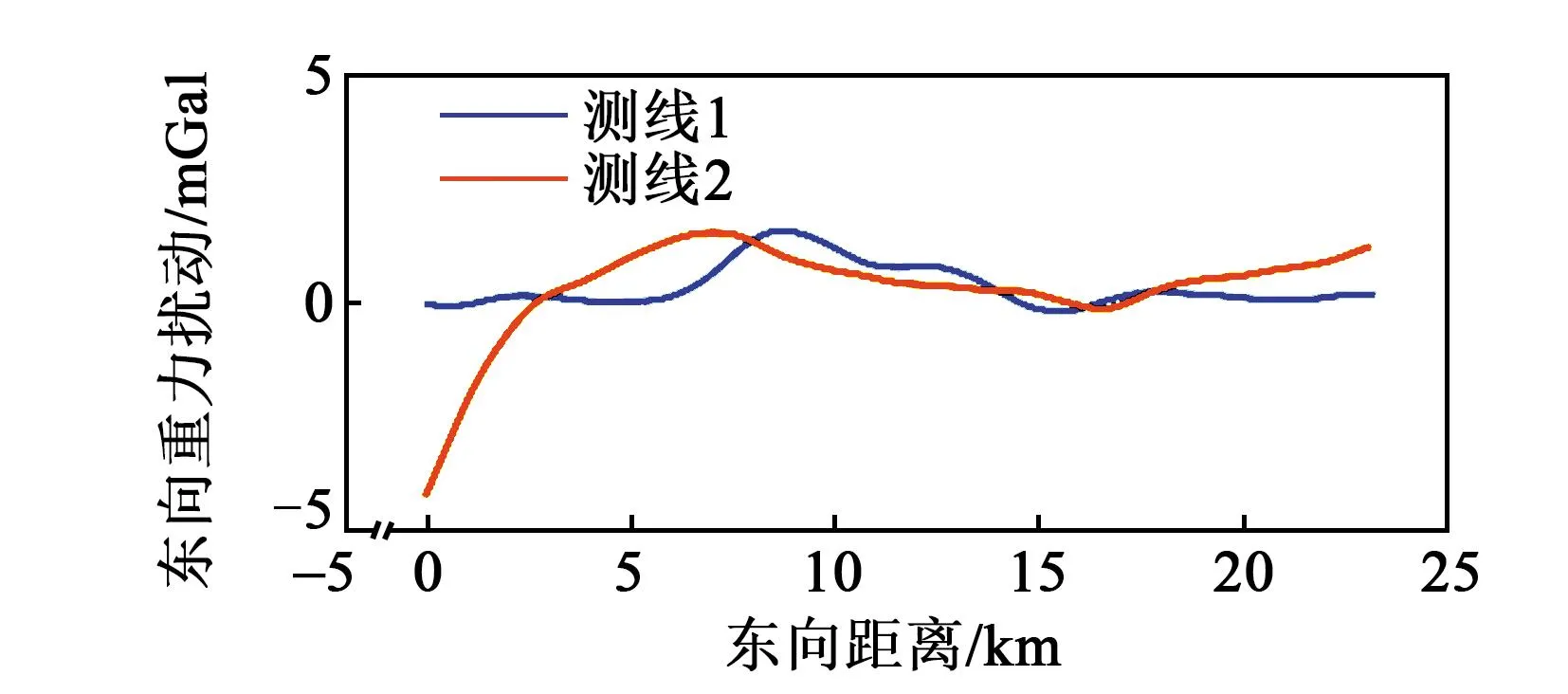
圖3 兩條東西向測線重力擾動矢量東向分量
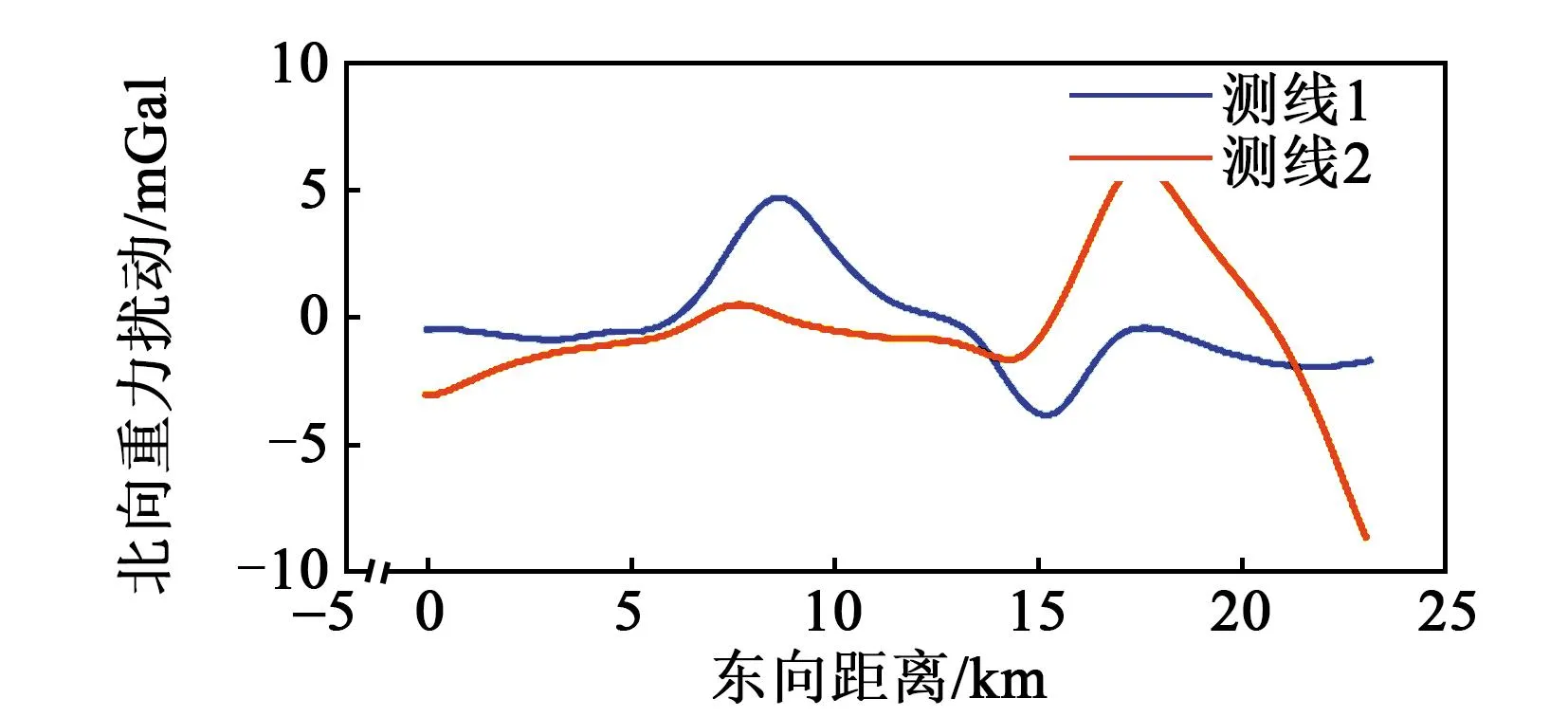
圖4 兩條東西向測線重力擾動矢量北向分量
兩條南北向測線的重力擾動矢量水平分量計算結果如圖5、6所示。由圖可知,艦船在南北方向航行時,兩條測線的東向和北向重力擾動重合情況較好,兩條測線上的重力擾動水平分量存在的偏差在允許范圍內,因此認為水平重力擾動能夠從速度誤差中分離出來。
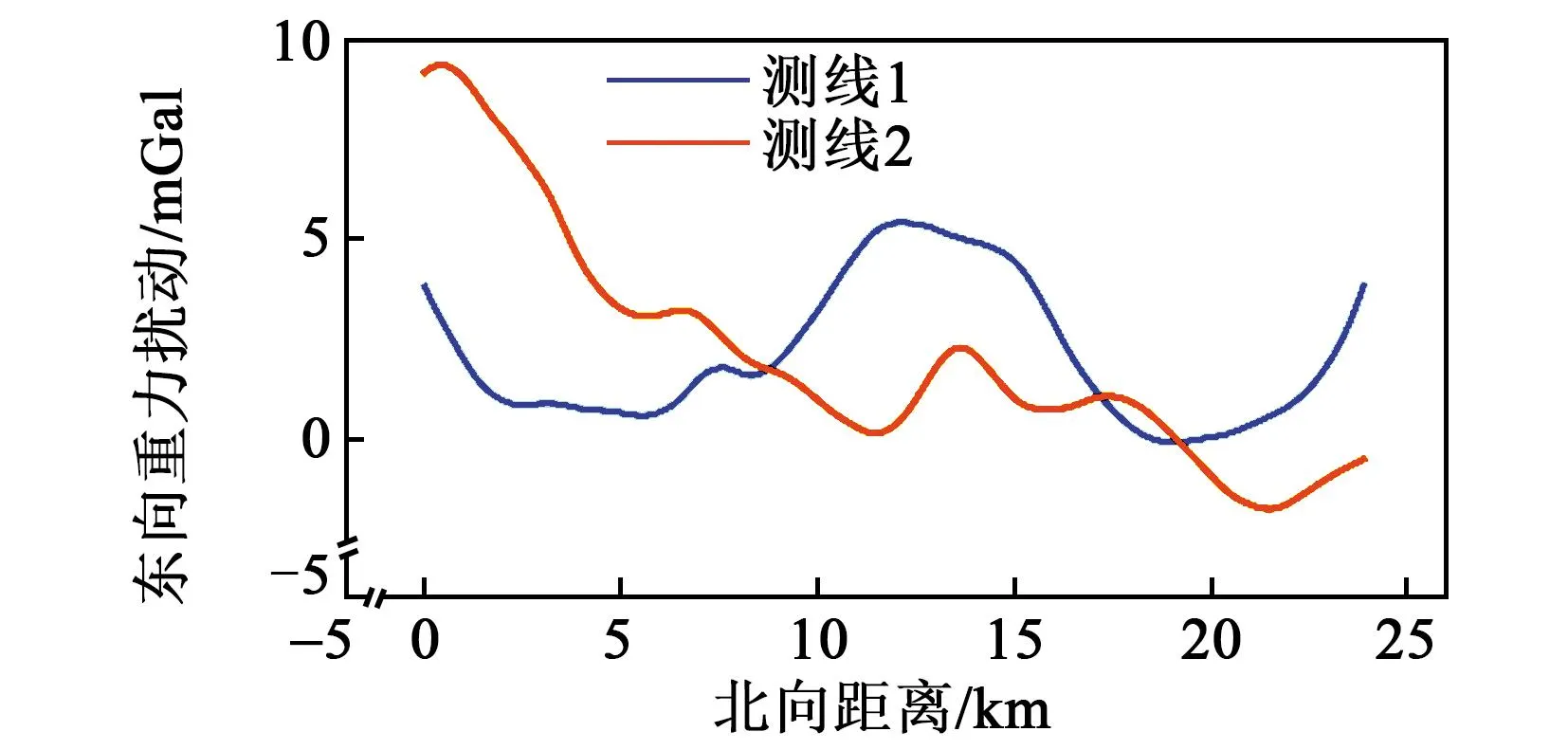
圖5 兩條南北向測線重力擾動矢量東向分量

圖6 兩條南北向測線重力擾動矢量北向分量
兩組測線的東向、北向重力擾動矢量的重復線精度如表1所示。

表1 兩組重復測線的重力擾動的重復線精度
4 結束語
海洋重力矢量測量采用兩步法估計重力擾動矢量水平分量。第一步采用高精度捷聯慣導算法和擴展卡爾曼濾波對加速度計偏差進行了估計和補償,獲得計算導航系中的比力。第二步構建了重力擾動矢量水平分量的計算方程,將重力擾動矢量的水平分量建模為二階高斯-馬爾可夫隨機過程,并利用正向-平滑的卡爾曼濾波,以分離加速度計偏差和重力擾動水平分量。其他重力擾動水平分量的求解方法均為一步法,水平重力擾動根據SINS/GNSS組合系統的卡爾曼濾波結果直接計算。但加速度計偏差和姿態誤差角在估計過程中是耦合的,通過一步法不能有效區分。對實驗數據的處理結果表明本文所提方法有效。
猜你喜歡
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
火花(2019年12期)2019-12-26 01:00:28
人大建設(2019年12期)2019-05-21 02:55:32
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
電源技術(2016年9期)2016-02-27 09:05:39
學苑創造·A版(2015年11期)2016-01-14 09:03:27
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
電子設計工程(2015年13期)2015-02-27 12:06:43