面向瓜果蔬菜增產的自適應節能補光系統設計
2024-01-02 00:00:00葛昊明蔣彩麟蔣寧曄鄒凱周宇恒劉浩然
中國新技術新產品 2024年24期
關鍵詞:單片機



摘 要:隨著城鄉居民生活水平提高,對瓜果蔬菜的需求也日益增長。現有的農業增產研究多數在育種、水肥管理等領域,很少有研究關注瓜果蔬菜的光照動態調整問題。針對瓜果蔬菜光強適應系統的空缺,本文提出一種基于反饋控制機制的自適應節能補光系統。經過程序優化和試驗驗證,結果表明本文系統實現了精準控制、自動補光以及實時調控的設計目標。本文系統的應用前景包括家禽類產蛋節律控制、珍貴中藥材保育等,為新一代智慧農業的發展提供了新的思路。
關鍵詞:智慧農業;反饋控制;果蔬增產;單片機
中圖分類號:TV 93 " " " " " 文獻標志碼:A
作物增產的主流方式為育種、采用先進給水肥料配給等。這些方式在一定程度上提高了作物的產量,但是水肥管理系統的設計和使用成本較高,能夠負擔該成本的農戶較少。基于這些局限性,本文提出一種環保、安全、可靠和成本低的針對果蔬產量增長的補光控制系統。LED燈是一項成熟的工業技術,具有使用壽命長、光譜純度高等優點,廣泛應用于作物的增長增收研究。多項研究結果表明,對作物進行光合作用的補光技術可以有效提高作物產量[1]。
LED補光技術仍然存在較大的缺陷,補光設備多數采用固定值進行補光[2],即觀測員根據文獻和經驗,選取一個固定值例如200 μmol/(m2·s-1)進行補光[3],該方案雖然可以將黃瓜產量提高165.27%,但是存在外界光源過高引起過照和外界光源過低引起照度不足的情況,造成能源浪費、作物增產規模不佳。
基于此,本文提出了一種以理想光照強度作為參考值,利用LED燈對該參考值進行動態補足的自適應節能補光系統,進行仿真模擬和實物驗證,試驗結果表明該方案可以準確、高效地提供作物需要的光源,為節能、增產提供條件。
1 自適應動態補光系統
1.1 硬件設計
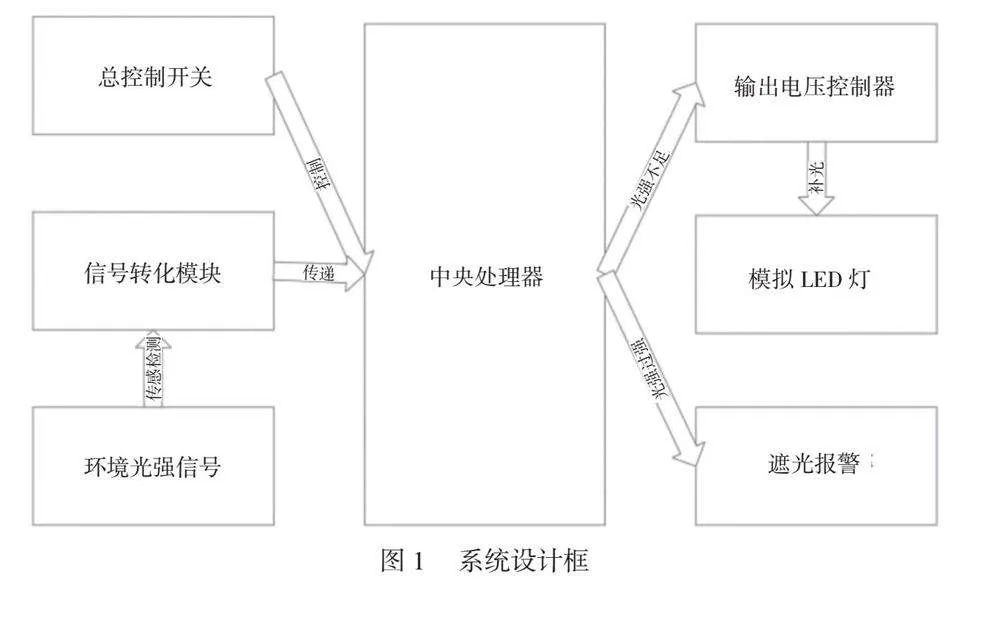
針對瓜果種植多采用固定補光技術的現狀,本文提出一種基于環境光強進行實時調控的補光增產系統設計。與其他補光方案相比,該設計的優點是能夠檢測環境光強,實時控制補光,補光參數能夠根據環境的光強變化實時變化。在控制硬件方面,本文使用Arduino單片機進行控制,該單片機運行穩定,使用成本和技術門檻低,可以滿足本文系統設計的需要。系統設計框如圖1所示。
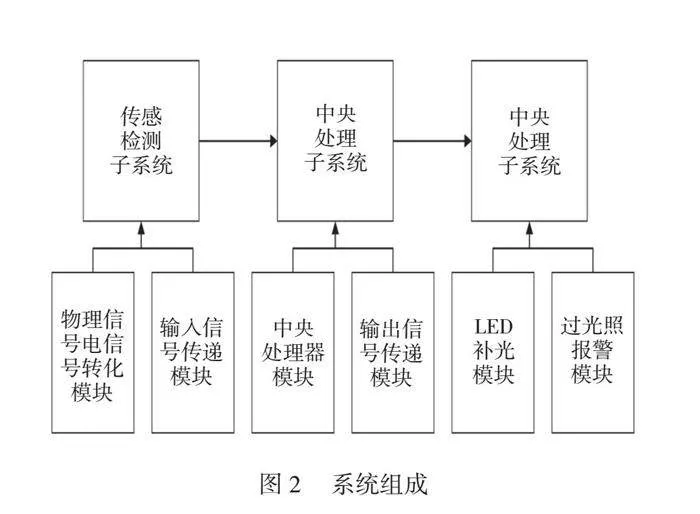
自適應動態補光系統主要是由3個子系統組成的,分別為傳感檢測子系統、中央處理子系統以及補光執行子系統。傳感檢測子系統主要包括物理信號向電信號轉化模塊和輸入信號傳遞模塊,中央處理子系統主要包括中央處理器模塊和輸出信號傳遞模塊,補光執行子系統主要包括補光模塊和報警模塊,3個子系統之間相互協作,利用光強傳感器獲得環境光強信號,由中央處理器處理后輸出控制信號,最終由補光執行單元進行補光。系統組成如圖2所示。
1.2 傳感器選擇與參數說明
1.2.1 光敏電阻
采用型號為LDR-05的光敏電阻,該電阻在10 lx~1 000 lx光強條件下靈敏度和溫度穩定性很高,其阻值為1 kΩ~10 kΩ,響應時間快(lt;10 ms),適用于對環境光強進行實時監測。
1.2.2 LED燈的規格
選用Phytolux系列LED燈,其峰值波長為660 nm,功率為20 W,有適合植物生長的紅藍光組合,具備調光功能,能夠根據實時光強需求調節光輸出。
1.2.3 微控制器
Arduino Mega 2560有54個數字輸入/輸出引腳和16個模擬輸入引腳,能夠同時處理多個傳感器數據,處理速度為16 MHz,滿足實時控制要求,因此本文將其作為中央控制單元。
1.3 系統功能
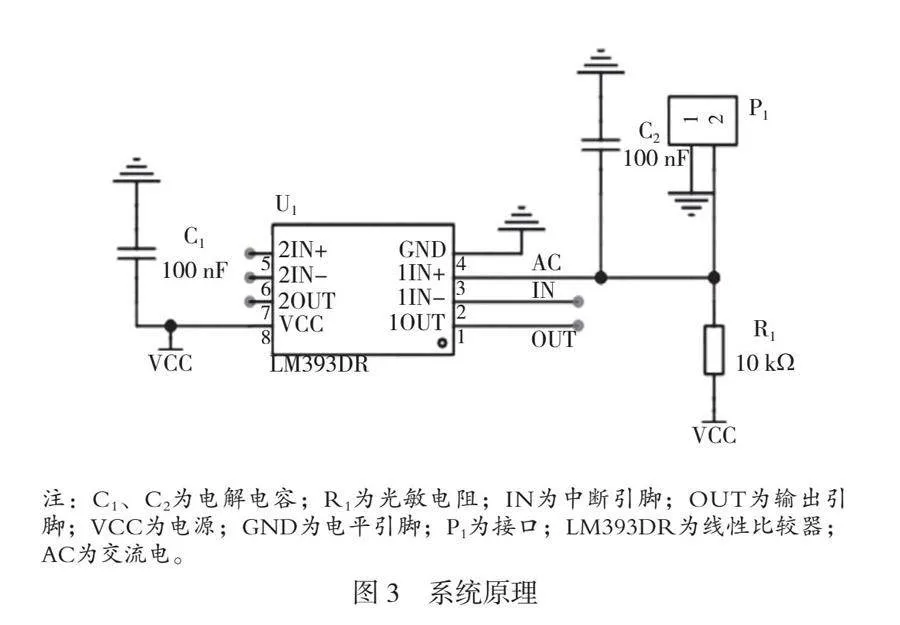
在種植環境中選擇適當的采集點實時采集環境光強,采集光強信號后,實時將采集的光強信號反饋至中央處理器。由中央處理進行判斷,如果判定為光強不足,那么根據光強的缺少量實時將需要補充的光強信息發送給LED燈,使LED燈執行自適應補光操作。如果判定為光強過高,那么發送預警信號,提醒控制者注意遮光,避免作物曬傷。系統原理如圖3所示。
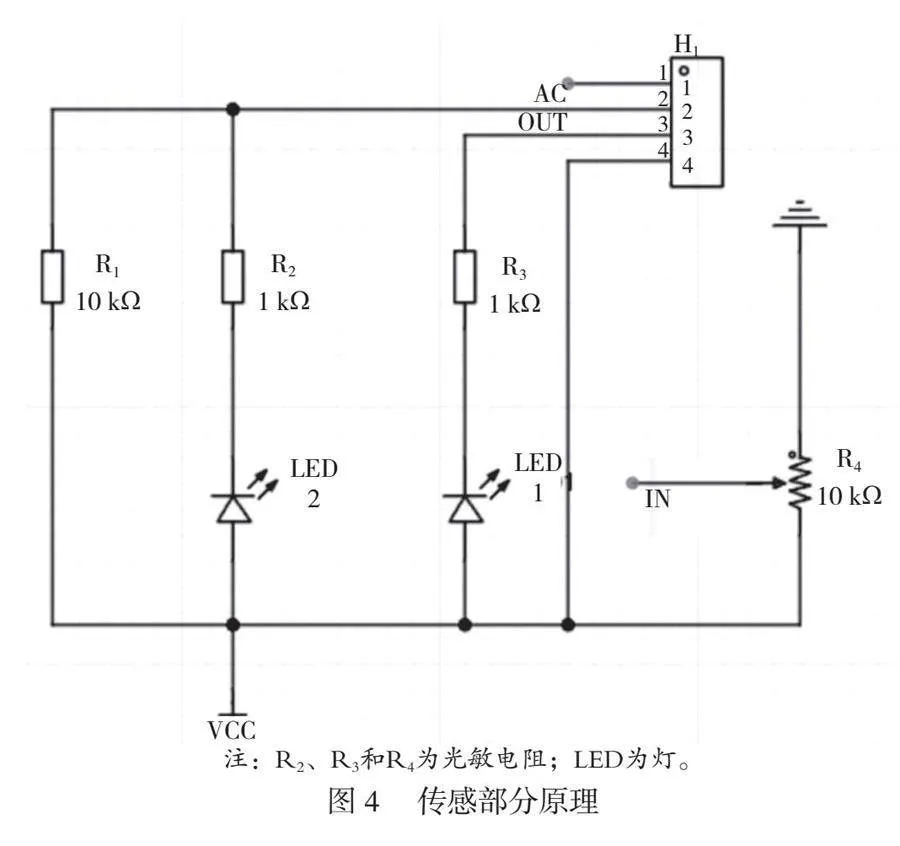
1.4 光強檢測原理
光強傳感器的數據來源為環境光強,光信號變化引起光強傳感器電平變化,將光強轉化為電壓信號,完成第一步信號采集工作,將信號采集的結果傳遞至中央芯片,為后續信號處理做準備。系統傳感部分原理如圖4所示。
1.5 自適應補光原理
環境光強變化將直接影響光敏電阻的阻值,對其電學特性產生影響。基于此,本設計的步驟如下。
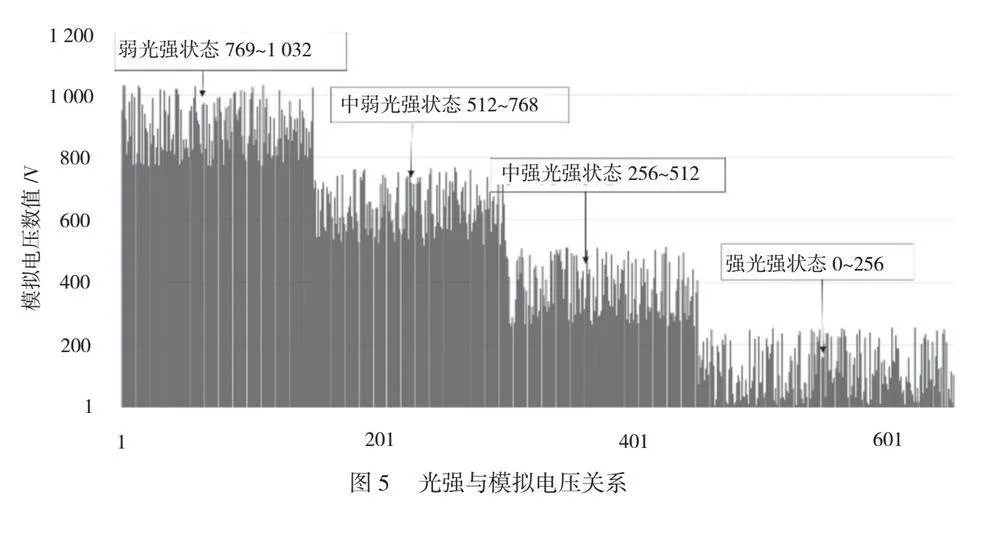
步驟一:光強傳感器在環境中接受光照,利用環境光強對光敏電阻阻值的影響將光強信號轉化為電信號[4]。在不同光強信號下,光強傳感器傳遞的電信號有明顯差異,在采集傳感器串口模擬量的過程中,由于環境光強存在差異,因此模擬量區別較大。當環境光強較高時,模擬量處于較低水平;當環境光強較低時,模擬量處于較高水平。光強與模擬電壓關系如圖5所示。
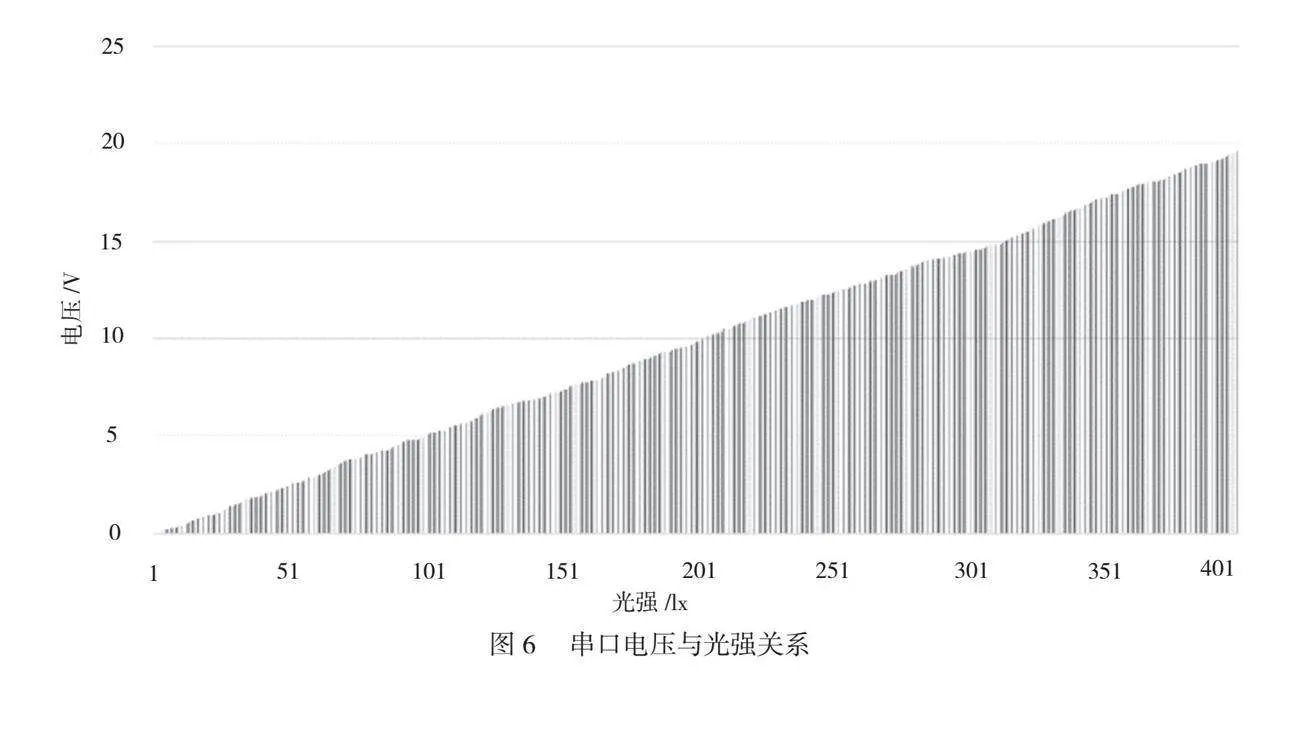
步驟二:利用光強傳感器模塊將光強信號傳遞至中央處理器,中央處理器根據算法進行處理,計算需要補充的光強參數,以電平信號的形式傳遞至執行單元, 串口電壓與光強關系如圖6所示。
步驟三:執行單元接收傳感器傳遞的電平信號,以該信號為準進行定量光照,在特殊情況下如果光照過強,那么及時向管理者提醒遮光。
1.6 技術參數
系統主要技術參數包括以下3個。1)溫度。-30 ℃~100 ℃。2)主要功能。根據具體場景進行補光,在必要情況下報警遮光。3)使用工況。正常的農業生產工況均可。
2 軟件設計
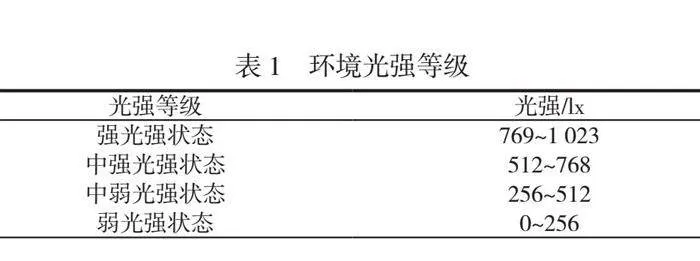
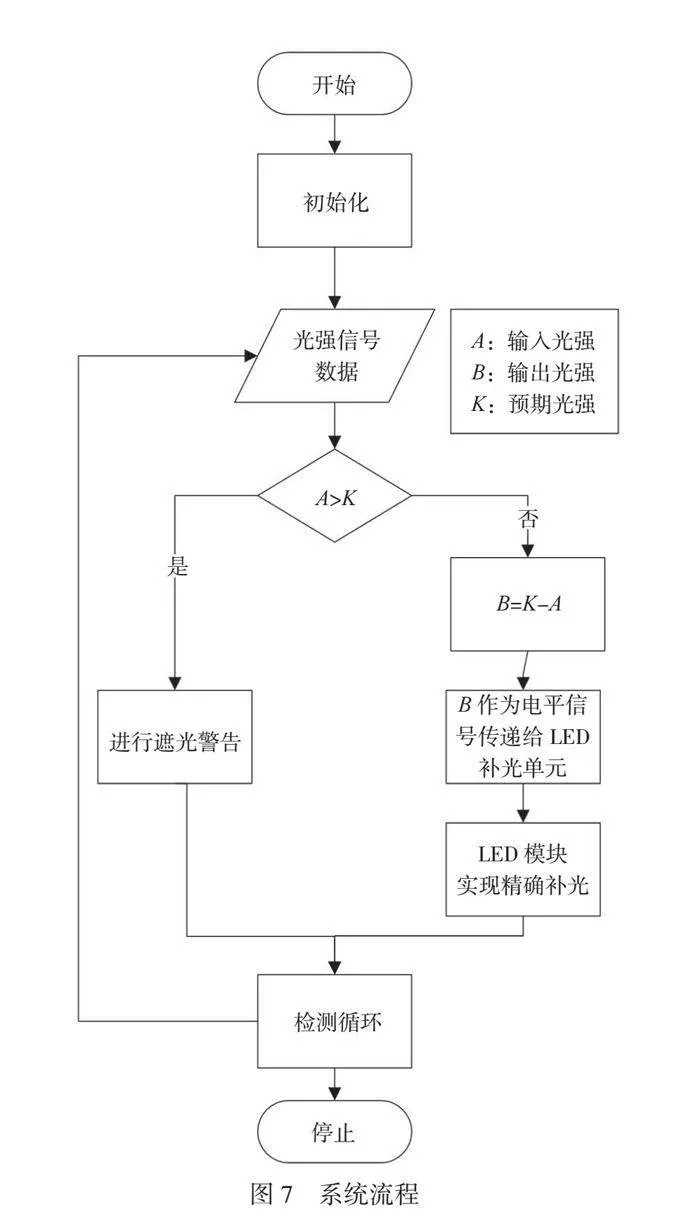
系統基于Arduino平臺進行開發,程序設計的核心算法為基于動態光強信號進行自適應輸出信號的算法。具體來說,本文根據光強傳感器獲得光強信號,利用中央處理器進行映射運算,獲得待測光強的相對值,利用反饋控制機制準確、高效地計算理想的光強值和LED燈的電壓值,利用print函數輸出至串口,利用脈沖寬度調制(Pulse Width Modulation,PWM)信號精確控制LED燈的輸出。最終達到動態精準補光的預期效果。系統流程如圖7所示。環境光強等級見表1。
2.1 關鍵步驟
2.1.1 傳感器數據讀取
2.1.1.1 步驟描述
微處理器(Microcontroller Unit,MCU)和ADC模塊定時讀取光敏電阻的輸出信號,將該信號轉換為數字信號(光強值)。在程序初始化后,主循環中不斷執行該過程,以保證系統實時監測環境光強。
2.1.1.2 邏輯說明
使用analogRead(A0)函數從光強傳感器中讀取光強信號,存儲在變量lightSensorValue中。
2.1.2 數據處理
2.1.2.1 步驟描述
MCU將讀取的光強值與預期光強K進行比較,計算需要補光或減少的輸出光強B。
2.1.2.2 邏輯說明
根據計算公式B=K-lightSensorValue獲得需要的補光量,使用映射函數map()將其轉換為PWM信號的占空比。
2.1.3 控制信號生成
2.1.3.1 步驟描述
根據計算得到的光強差值生成對應的PWM信號,傳遞至LED驅動電路來控制LED燈的亮度。
2.1.3.2 邏輯說明
使用analogWrite(D9, PMWValue)函數將計算得到的PWM信號輸出至LED燈,控制光強補償。
2.1.4 LED燈控制
2.1.4.1 步驟描述
LED燈根據接收的PWM信號調整亮度對環境光強進行實時補償。如果光強過高,那么系統發出遮光警告并減少LED燈的輸出。
2.1.4.2 邏輯說明
程序會判斷PMW Value大小,決定是否需要調節LED燈的亮度或發出遮光警告。
2.1.5 循環與更新
2.1.5.1 步驟描述
上述步驟循環執行,MCU不斷更新光強數據并動態調整LED燈的輸出,保證環境光強始終接近設定值。
2.1.5.2 邏輯說明
使用主循環loop()持續運行數據讀取、處理和控制信號輸出,保證系統在不同環境中能夠自動進行調節。
2.2 控制子系統
2.2.1 環境光強獲取子系統
環境光強獲取子系統的核心構成元件是光敏電阻,其是一種基于內光電效應的半導體,隨著入射光強增加,該半導體的阻值下降。基于其電學特性和外部光強存在關聯的特性,該元件廣泛應用于檢測環境光強,本文選擇該元件作為環境光強獲取子系統的核心元件。
2.2.2 光強物理信號與電信號轉換子系統
光強物理信號與電信號轉換子系統由電路比較器和運算放大器組成。系統能夠將本來不能計算的光強信號轉化為便于計算的模擬量信號,將該信號信息暫存在寄存器中,為后續運算做準備。
2.2.3 電信號傳遞子系統
電信號傳遞子系統由輸入信號傳遞子系統和輸出信號傳遞子系統組成。輸入信號傳遞子系統鏈接前端的光強檢測單元和中央處理器來傳輸輸入信號,輸出信號傳遞子系統鏈接后端的補光執行單元和中央處理器來傳遞輸出信號。
2.2.4 中央處理子系統
中央處理子系統為系統的核心子系統,其作用是處理輸入的模擬量信號,得到具體的輸出信號值。中央處理子系統可以直接獲得輸入光強A,基于系統預設的理想光強K計算理想光強與環境光強的差值,得到B。B為執行單元的執行信號,可以利用中央處理子系統對輸出信號直接進行控制。當A大于K時,系統能夠跳出補光循環,提醒用戶進行遮光,避免曬傷。
2.2.5 補光執行子系統
補光執行子系統的作用是響應中央處理子系統發出的輸出信號,系統對LED補光單元進行控制,并動態自適應調節補光強度,達到節能增產的目的。
2.3 軟件設計的具體操作
2.3.1 自適應補光算法
算法基于光敏電阻讀取的環境光強值計算A,并與K進行比較。如果Alt;K,那么計算差值B=K-A,并將B轉化為PWM信號,控制LED燈的亮度。
2.3.2 代碼示例
int lightSensorValue=analogRead(sensorPin);//讀取光強傳感器值
int desiredLight=400;//設定的理想光強
int adjustment=desiredLight-lightSensorValue;//計算需要補充的光強
int PMWValue=map(adjustment,0,1023,0,255);//將補充光強映射為PWM值analogWrite(ledPin,PMWValue);//輸出PWM信號控制LED燈
2.4 反饋控制系統分析
系統的反饋控制基于比例-積分-微分 (Proportion Integration Differentiation,PID)算法,利用A與K的差值B調節LED燈的輸出。PID控制器的計算過程如公式(1)所示。
u(t)=kp?e(t)+ki?∫e(t)dt+kd?de(t)/dt (1)
式中:u(t) 為控制信號;e(t)為控制器的輸入信號與期望值之間的誤差。調整PID參數(kp, ki, kd),優化系統的響應速度和穩定性,當環境光強突變時,系統能夠快速、平穩地調整LED燈的輸出。
3 樣機測試
基于以上設計,本文搭建了樣機(如圖8所示)進行測試。
3.1 計算多傳感器加權平均光強
5個傳感器測得的光強分別為A1,A2,A3,A4和A5 。傳感器權重為w,每個傳感器的權重分別為w1,w2,w3,w4和w5 ,如公式(2)所示。
(2)
式中:N為測試總次數。
3.2 誤差分析與修正
假設每個傳感器的測量值包括誤差εi,Ai為實際測量值,Ai' 為傳感器測得的真實光強值,那么加權平均光強的總誤差如公式(3)所示。
(3)
進行誤差修正,修正后的加權平均光強如公式(4)所示。
(4)
3.3 計算系統輸出信號
預期光強是系統設計的目標光強值。系統根據檢測的與K之間的差異來計算輸出信號,如公式(5)所示。
(5)
3.4 狀態描述
狀態一:補光
當lt;K時,說明環境光強低于預期值,系統進入補光狀態。此時,輸出信號為正,系統將增加光強來補足缺口,如公式(6)所示。
(6)
狀態二:過強
當gt;K時,說明環境光強過高,系統進入過強狀態。此時,輸出信號為負,需要減弱光照或停止補光,如公式(7)所示。
(7)
狀態三:正常
當gt;K時,說明環境光強處于正常范圍,系統不需要進行補光或調節光強。此時,輸出信號接近0,如公式(8)所示。
(8)
3.5 示例計算
傳感器測量值和誤差如下。
A1=300 lx,ε1=2 lx,w1=0.2
A1=320 lx,ε1=3 lx,w1=0.1
A1=310 lx,ε1=2 lx,w1=0.3
A1=305 lx,ε1=2 lx,w1=0.2
A1=315 lx,ε1=1 lx,w1=0.2
加權平均光強如公式(9)所示。
=(0.2×300)+(0.1×320)+(0.3×310)+(0.2×305)+(0.2×315)=309 lx
(9)
總誤差如公式(10)所示。
=(0.2×2)+(0.1×1)+(0.3×3)+(0.2×2)+(0.2×1)=1.8 lx (10)
修正后的加權平均光強如公式(11)所示。
=309-1.8=307.2 lx " " " (11)
K=400 lx,輸出信號B如公式(12)所示。
B=400-307.2=92.8 lx (12)
系統增加的光強為92.8 lx。
本文設計基本實現了預期的動態自適應補光的設計目標。
4 結語
本文基于傳感檢測技術對基于環境光強變化改變補光強度的自適應補光進行設計,避免過度補光造成資源浪費,使作物增長效果更好,在農業生產領域意義十分重要。本文設計仍然存在一定的局限性,例如沒有經過作物生產試驗,獲取理想光強存在難度等,后續將主要針對作物生產實際效果進行驗證,并采用人工智能方法計算理想光強的數值。
參考文獻
[1]唐立酈,張晟齊,王飛,等.不同占空比的脈沖光源對工業大麻生長和生理生化的影響[J].中國麻業科學,2024,46 (2):1-18.
[2]唐敏,徐德偉.瓜果類蔬菜設施栽培的研究現狀[J].農技服務, 2019,36(11):16-18.
[3]楊碧云,徐永,陳藝群.人工補光在促進設施瓜果生產上的應用探討[J].農業工程技術,2022,42(13):23-26.
[4]郝東川,司雨.LED燈對設施栽培瓜果類蔬菜產量的影響[J].長江蔬菜,2012(18):58-60.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
