掘進(jìn)機(jī)高智能化截割控制系統(tǒng)研究
2024-01-04 11:53:50孫浩宇
機(jī)械管理開發(fā) 2023年11期
關(guān)鍵詞:系統(tǒng)
孫浩宇
(華陽集團(tuán)開元公司, 山西 壽陽 045400)
0 引言
為解決煤炭開采過程中“采掘失衡”問題,提高巷道掘進(jìn)過程中的穩(wěn)定性,提出了智能化截割控制技術(shù)。雖然該技術(shù)已經(jīng)在井下巷道掘進(jìn)中被初步應(yīng)用,但對(duì)該技術(shù)的研究主要集中在斷面自動(dòng)成型、斷面自動(dòng)截割等方面,對(duì)掘進(jìn)機(jī)的截割狀態(tài)主要是利用截割電機(jī)電流的變化來進(jìn)行調(diào)整,在實(shí)際應(yīng)用過程中存在著以下問題[1]:系統(tǒng)所設(shè)置的負(fù)載沒有井下實(shí)際數(shù)據(jù)的支撐,因此對(duì)井下巖層的識(shí)別準(zhǔn)確度較差,導(dǎo)致自動(dòng)化控制系統(tǒng)難以對(duì)掘進(jìn)機(jī)的運(yùn)行狀態(tài)作出準(zhǔn)確判斷;截割載荷變化判斷依據(jù)單一,只能對(duì)截割載荷的變化作出粗略的判斷,因此準(zhǔn)確性較差。
因此,現(xiàn)有的掘進(jìn)機(jī)自動(dòng)化控制系統(tǒng)難以滿足對(duì)掘進(jìn)機(jī)自動(dòng)截割控制的需求。文章提出了一種新的掘進(jìn)機(jī)智能截割控制技術(shù),該技術(shù)采用了新的多數(shù)據(jù)傳感器進(jìn)行信息采集,優(yōu)化了掘進(jìn)機(jī)煤矸識(shí)別和自動(dòng)截割控制邏輯,實(shí)現(xiàn)了對(duì)掘進(jìn)機(jī)截割狀態(tài)的精確調(diào)控。
1 掘進(jìn)機(jī)智能截割控制系統(tǒng)
掘進(jìn)機(jī)的智能化截割控制主要是利用了多數(shù)據(jù)傳感器對(duì)掘進(jìn)機(jī)的運(yùn)行狀態(tài)進(jìn)行判斷。其通過截割電機(jī)的截割電流監(jiān)測(cè)、執(zhí)行油缸的工作壓力監(jiān)測(cè)及截割振動(dòng)監(jiān)測(cè)等,實(shí)現(xiàn)對(duì)掘進(jìn)機(jī)在不同截割狀態(tài)下煤矸的精確識(shí)別,滿足對(duì)掘進(jìn)機(jī)精確截割控制的需求。
對(duì)掘進(jìn)機(jī)的智能截割控制采用了多重控制邏輯。在正常的工況下,掘進(jìn)機(jī)通過多傳感器信息的自適應(yīng)截割控制系統(tǒng),利用改進(jìn)粒子群算法優(yōu)化的BP 神經(jīng)網(wǎng)絡(luò)控制器來對(duì)掘進(jìn)機(jī)工作過程中的截割載荷信息進(jìn)行識(shí)別,再利用PID 控制邏輯[2]來提升截割時(shí)的效率和穩(wěn)定性,滿足掘進(jìn)機(jī)搖臂擺速自適應(yīng)煤巖截割。在特殊的工況下,系統(tǒng)利用截割電機(jī)電流和額定電流之間的比值,再引入截割臂驅(qū)動(dòng)油缸伸縮量的變化率來對(duì)掘進(jìn)狀態(tài)進(jìn)行輔助判斷,確保多硬質(zhì)點(diǎn)識(shí)別的精確性。該掘進(jìn)機(jī)智能截割系統(tǒng)整體結(jié)構(gòu)如圖1 所示。

圖1 掘進(jìn)機(jī)智能控制系統(tǒng)結(jié)構(gòu)示意圖
由圖1 可知,該控制系統(tǒng)的硬件部分主要包括機(jī)載主控系統(tǒng)、系統(tǒng)執(zhí)行機(jī)構(gòu)、傳感與檢測(cè)系統(tǒng)三大部分。傳感與檢測(cè)系統(tǒng)主要是利用多種傳感器對(duì)掘進(jìn)機(jī)的截割狀態(tài)進(jìn)行控制;機(jī)載主控系統(tǒng)主要包括上位機(jī)和下位機(jī)控制器,同時(shí)包括遠(yuǎn)程監(jiān)控界面,系統(tǒng)能夠通過該界面對(duì)掘進(jìn)機(jī)掘進(jìn)狀態(tài)進(jìn)行監(jiān)測(cè)并下發(fā)控制指令;系統(tǒng)執(zhí)行機(jī)構(gòu)主要包括各類電磁閥和控制油缸,能夠?qū)崿F(xiàn)對(duì)掘進(jìn)機(jī)運(yùn)行狀態(tài)的調(diào)控。
2 掘進(jìn)機(jī)自適應(yīng)控制技術(shù)
掘進(jìn)機(jī)在截割作業(yè)的過程中,當(dāng)煤巖的硬度發(fā)生變化時(shí),作用在截割電機(jī)上的載荷會(huì)發(fā)生變化,驅(qū)動(dòng)截割電機(jī)的電流也會(huì)發(fā)生變化。由于作用到截割臂上的反作用力的變化,也會(huì)導(dǎo)致截割驅(qū)動(dòng)油缸工作壓力的變化。同時(shí)由于截割作業(yè)時(shí)截割機(jī)構(gòu)上會(huì)形成突變載荷,因此會(huì)導(dǎo)致掘進(jìn)機(jī)工作時(shí)的截割振動(dòng)加劇。
通過以上分析,結(jié)合現(xiàn)有單一監(jiān)測(cè)方案所存在的問題,提出了一種基于電流、壓力、振動(dòng)監(jiān)測(cè)的多重載荷判斷邏輯,提高對(duì)掘進(jìn)機(jī)截割作業(yè)過程中載荷變化情況的精確監(jiān)測(cè)。為了提高對(duì)多重監(jiān)測(cè)信號(hào)判別的精確性,在系統(tǒng)中首次引入了改進(jìn)粒子群算法優(yōu)化BP神經(jīng)網(wǎng)絡(luò)判別方案[3],其能夠?qū)崿F(xiàn)多種復(fù)雜的非線性映射功能,使截割機(jī)構(gòu)的截割擺速能夠適應(yīng)煤巖的硬度而自適應(yīng)變化。該截割機(jī)構(gòu)自適應(yīng)截割控制邏輯如圖2 所示。

圖2 自適應(yīng)截割控制邏輯示意圖
對(duì)掘進(jìn)機(jī)執(zhí)行油缸工作壓力的監(jiān)測(cè)采用了BYD-60 型隔爆壓力變送器,對(duì)掘進(jìn)機(jī)工作時(shí)的振動(dòng)加速度監(jiān)測(cè)采用了GBC1000 型加速度傳感器[4],對(duì)掘進(jìn)機(jī)工作時(shí)的截割電流監(jiān)測(cè)則利用了掘進(jìn)機(jī)機(jī)載的狀態(tài)監(jiān)測(cè)傳感器。所產(chǎn)生的各類監(jiān)測(cè)數(shù)據(jù)均存儲(chǔ)在機(jī)載大容量數(shù)據(jù)記錄儀中,各監(jiān)測(cè)傳感器如圖3 所示。
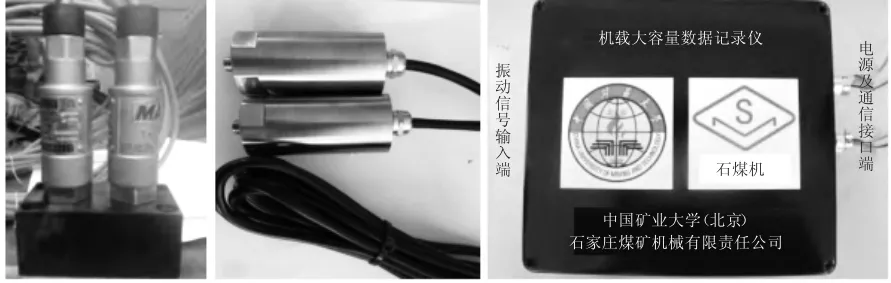
圖3 監(jiān)測(cè)傳感器示意圖
3 井下硬質(zhì)點(diǎn)識(shí)別控制技術(shù)
掘進(jìn)機(jī)在截割作業(yè)的過程中,當(dāng)遇見巖層硬度增大時(shí),會(huì)導(dǎo)致截割電機(jī)的負(fù)載功率迅速上升,此時(shí)為了避免電機(jī)負(fù)載過大,就需要適當(dāng)降低掘進(jìn)機(jī)截割臂的擺速,降低電機(jī)負(fù)載。傳統(tǒng)控制模式下,掘進(jìn)機(jī)在減速以后沒有足夠的動(dòng)力去克服截割阻力,導(dǎo)致截割機(jī)構(gòu)的擺臂運(yùn)行很慢,而且會(huì)在夾矸的表面出現(xiàn)打滑問題[5],導(dǎo)致截割結(jié)構(gòu)發(fā)生損壞。
在對(duì)掘進(jìn)機(jī)的截割流程進(jìn)行分析后,提出了一種新的井下硬質(zhì)點(diǎn)識(shí)別控制技術(shù),以截割臂驅(qū)動(dòng)油缸伸縮量的變化率和截割電流變化情況為判斷基礎(chǔ)進(jìn)行判斷。其對(duì)硬質(zhì)點(diǎn)的判別邏輯可以設(shè)定為,在10 s 以內(nèi),若電機(jī)的電流大于截割電機(jī)的額定電流、小于1.2 倍的額定電流,且驅(qū)動(dòng)油缸的伸縮量小于系統(tǒng)設(shè)定的限定值,則判斷遇見了硬質(zhì)點(diǎn),即開始執(zhí)行硬質(zhì)點(diǎn)截割控制邏輯。該硬質(zhì)點(diǎn)識(shí)別控制策略如圖4 所示[6]。

圖4 硬質(zhì)煤巖識(shí)別控制技術(shù)
根據(jù)系統(tǒng)設(shè)定,當(dāng)掘進(jìn)機(jī)截割頭遇見硬質(zhì)煤巖以后,在遠(yuǎn)程控制界面上會(huì)出現(xiàn)“截割巖石”,系統(tǒng)自動(dòng)關(guān)閉自適應(yīng)截割程序。此時(shí)系統(tǒng)加大電液比例閥開口處的電力,增加其進(jìn)給力;同時(shí)系統(tǒng)對(duì)截割電流的變化情況和驅(qū)動(dòng)油缸的伸縮量變化情況進(jìn)行監(jiān)測(cè),如果此時(shí)截割電流小于1.2 倍的額定電流,則系統(tǒng)判斷掘進(jìn)機(jī)已經(jīng)把夾矸進(jìn)行了破碎,系統(tǒng)同時(shí)減小電液比例閥開口處電流[7],控制截割臂開始減速并減少截割電機(jī)的負(fù)載,然后系統(tǒng)自動(dòng)開啟自適應(yīng)截割程序,保證掘進(jìn)機(jī)的正常截割。若不能滿足上述條件,則說明在截割過程中遇見了難以截割的硬質(zhì)點(diǎn),需要轉(zhuǎn)為人工操控,提高截割安全性。
4 試驗(yàn)驗(yàn)證
以EBZ135 型掘進(jìn)機(jī)為研究對(duì)象,對(duì)其控制系統(tǒng)進(jìn)行改造,并進(jìn)行智能截割控制試驗(yàn)。掘進(jìn)機(jī)截割機(jī)構(gòu)擺速自適應(yīng)控制試驗(yàn)結(jié)果如圖5-1 所示,掘進(jìn)機(jī)截割作業(yè)過程中的硬質(zhì)點(diǎn)判斷結(jié)果如圖5-2 所示。

圖5 掘進(jìn)機(jī)自適應(yīng)截割控制結(jié)果
由圖5-1 可知,掘進(jìn)機(jī)能夠根據(jù)煤巖狀態(tài)的傳感器信息,自動(dòng)調(diào)整掘進(jìn)機(jī)截割臂的截割速度。當(dāng)在正常截割時(shí)掘進(jìn)機(jī)能夠以均勻的速度進(jìn)行截割,當(dāng)遇見煤巖時(shí)截割臂擺速能夠逐步降低,從而達(dá)到了保護(hù)截齒和截割電機(jī)的目的。在整個(gè)截割過程中,其響應(yīng)時(shí)間基本在0.7 s 作業(yè),響應(yīng)速度快、截割精度高。
由圖5-2 可知,當(dāng)煤巖硬度開始增大時(shí),截割電機(jī)的電流也逐步增加,截割機(jī)構(gòu)慢慢減速。當(dāng)滿足硬質(zhì)點(diǎn)判定條件時(shí),系統(tǒng)關(guān)閉自動(dòng)截割程序,電液比例閥的控制電流增加,在經(jīng)過10 s 的截割后,煤矸石被破碎掉,掘進(jìn)機(jī)又開始恢復(fù)自適應(yīng)截割控制。
在整個(gè)運(yùn)行過程中,掘進(jìn)機(jī)能夠按設(shè)定的程序進(jìn)行截割,對(duì)硬質(zhì)點(diǎn)的識(shí)別準(zhǔn)確度高,處理速度快,極大地提升了掘進(jìn)機(jī)自主截割作業(yè)的效率和安全性。
5 結(jié)論
1)掘進(jìn)機(jī)截割控制系統(tǒng)對(duì)截割載荷變化判斷依據(jù)單一,無法精確判斷掘進(jìn)機(jī)的運(yùn)行狀態(tài),是影響掘進(jìn)機(jī)自主截割效果的主要因素。
2)基于電流、壓力、振動(dòng)監(jiān)測(cè)的多重載荷判斷邏輯,能夠保證對(duì)截割載荷變化監(jiān)測(cè)的精確性。
3)硬質(zhì)點(diǎn)識(shí)別控制技術(shù)能夠以截割臂驅(qū)動(dòng)油缸伸縮量的變化率和截割電流變化情況為判斷基礎(chǔ)進(jìn)行判斷,保證了對(duì)硬質(zhì)點(diǎn)識(shí)別的精確性。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
