多約束航跡規劃與跟蹤制導律
2024-01-08 02:25:02尹中杰楊建東劉艷斌蔡克榮
上海航天 2023年6期
尹中杰,王 磊,楊建東,劉艷斌,王 楷,蔡克榮
(上海機電工程研究所,上海 201109)
0 引言
升力式飛行器是指能夠在20~70 km 高度進行高機動飛行,可執行偵查與對抗等任務的飛行器。因其具有航程遠、機動性強等優勢,受到各國的重視。考慮到升力式飛行器在滑翔過程中存在多方面的過程、終端約束,其中的航跡規劃以及跟蹤控制律設計引起了國內外學者的廣泛研究[1-4]。
滑翔段航跡規劃是指在不違背熱流、動壓、過載等各種約束的前提下,通過制導控制將升力式飛行器引導至中末制導交班點的工作。研究大致分為非線性優化、預測—校正、人工勢場法或啟發式4類。在非線性優化方面,趙吉松等[5-9]基于配點法通過對控制、狀態變量進行離散,構建出一種非光滑軌跡優化方法。周鼎等[10-13]利用考慮終端狀態的偽譜法將連續最優控制問題轉化為非線性規劃問題,開展非致命故障下的任務降級軌跡規劃問題研究。該方法具有性能最優、制導精度高的特點,但也存在強約束問題易收斂至局部最優解、優化時間較長的問題。在預測—校正方面,都延麗等[14-16]基于確定傾側角翻轉位置的航路點制導律,提出基于能量剖面的軌跡規劃策略。在此基礎上,章吉力[17]引入預測落點偏差作為目標函數進行指令求解,有效提升終端制導精度。此方法具備在線規劃能力,但由于傾側邏輯單一且不考慮能耗最優等指標,存在制導策略局限導致航程無法覆蓋全部能力范圍的問題。隨著啟發式概念的升溫,空天飛行器軌跡設計逐漸智能化[18-19]。陳上上等[20-21]通過計算再入走廊邊界的解析解,將約束轉為對參考剖面剩余坐標限制的指標函數,完成采用粒子群優化的軌跡規劃。但是粒子群優化只得到航跡剖面而非控制參數剖面,存在粒子數少于實際需求導致制導精度不足,軌跡無法物理實現的風險。
在軌跡跟蹤制導律設計方面,李曉龍等[22-23]將高度回路轉化為二階無靜差系統實現高度跟蹤。在此基礎上,劉凱等[24-26]應用期望極點配置完成軌跡誤差時變反饋系統設計。但是基于經驗設置的期望極點并不能保證二階系統控制性能的全局適應性,上述方法不適用于動力學特性變化較大的全空域軌跡跟蹤。
綜上所述,考慮到現有方法在規劃并跟蹤有繞禁飛區需求、能量單調且冗余不足的升力式飛行器航跡時存在針對性不強的問題,提出飛行策略預劃分手段,設計性能指標最優的多策略分段剖面函數。通過優化剖面飛行攻角、傾側角剖面函數特征參數的方式將無窮維軌跡優化問題轉化為有限維參數規劃問題,完成多約束航跡規劃。同時,基于LQR 調節器以位移加權誤差最小為優化指標完成極點實時尋優的軌跡跟蹤制導律二階系統設計,從而滿足全空域的高精度軌跡跟蹤。最后,通過拉偏情況的仿真,證明了方法的有效性。
1 動力學建模與問題描述
1.1 質點動力學模型
質點動力學模型在彈道坐標系中建立,采用傾斜轉彎模式(Bank To Turn,BTT),全再入過程均為無動力狀態,在球形大地假設下給出三維質點動力學模型:
式中:V為速度;θ為彈道傾角;ψ為彈道偏角;h為高度;λ為飛行器在地表投影點的經度,?為飛行器在地表投影點的緯度;Re為地球半徑;g為重力加速度;m為飛行器的質量;γ為傾側角;D為阻力;L為升力。
L和D的計算方法由式(2)給出:
式中:ρ為大氣密度,可以視為高度的函數;Sref為參考面積;CL、CD分別為升力和阻力系數。
1.2 多約束航跡規劃問題描述
多約束航跡規劃是指在已知飛行器初始狀態的情況下,設計滿足末端狀態和過程約束的攻角、傾側角剖面,并為飛行器裝訂滿足多種約束條件且性能指標函數最優的控制參數,從而完成優化設計的工作。已知初始狀態和控制量為
為滿足特殊的任務需求以及飛行器動力學特性,飛行全程將面臨著嚴格的過程約束,如動壓Qv、距離特定禁飛區最小斜距ΔRi等,具體可以描述為以下形式:
除此之外,為確保在中末制導交班點飛行器狀態位于末制導窗口區間,需要設置如下的終端約束條件:
選用末速Vf最大作為性能指標,則多約束航跡規劃問題可以轉化為如下最優控制問題:
1.3 航跡跟蹤制導問題描述
軌跡跟蹤制導問題可以描述為對于給定的滑翔段標稱軌跡:
利用線性二次型控制器設計原理,設計如下的狀態反饋控制器:
狀態反饋控制器基于設定的綜合考慮制導控制偏差與偏差控制量積分的加權性能指標函數:
計算滿足J最小的狀態反饋控制器系數,使得飛行器能夠用較小的加權偏差控制量確保實際飛行狀態與跟蹤標稱飛行軌跡中裝訂值總的偏差加權值最小。其中:
則軌跡跟蹤制導問題轉化為如下的狀態反饋控制器參數優化設計問題:
2 多約束飛行航跡優化設計
2.1 飛行策略剖面設計
針對現有方法(見表1)存在的計算量大、物理約束不滿足問題,本文基于策略預劃分手段分段設計策略剖面并優化參數,將無窮維軌跡優化問題轉化為有限維參數規劃問題,找到一條末速最優、又不違背各種約束的飛行軌跡,完成滑翔段強約束軌跡規劃。滑翔段策略剖面分為縱平面、橫側向兩部分,下面分階段給出具體策略剖面設計方案。
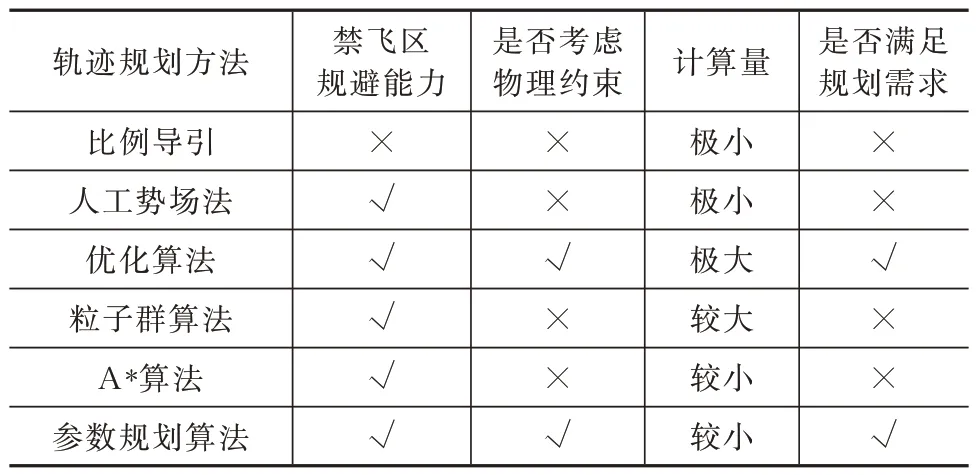
表1 方法對比表Tab.1 Comparison of methods
2.1.1 縱向平面飛行策略方案
升力式飛行器滑翔段動力學特性差異明顯,所以對某一固定單一的飛行策略剖面進行參數優化可能無法得到滿足約束的全局最優、次最優解。針對這個問題,基于策略預劃分手段將滑翔段分為3部分,分別為高空高速段、中空中速段和低空低速段,對應大攻角滑翔策略、定攻角策略和過渡段策略,通過分三段優化攻角剖面參數的方式完成縱向剖面設計。
在大攻角滑翔段,考慮到滑翔段初期飛行高度高導致大氣密度低升重無法配平,為避免飛行器以較大的高度變化率下滑,軌跡整體高度過低導致航程縮減,過渡段采用固定大攻角下滑。彈道逐漸拉起后,待高度變化率為正后切換至定攻角飛行段。
在定攻角飛行段,考慮到該階段飛行時間較長,設計復雜的攻角剖面形式存在優化時間過長的問題,所以采用定攻角模式飛行,幅值以末速最大為優化指標獲得,當彈目相對距離Dr小于預設值Dr0后切換至過渡段。
在過渡段,考慮到中末制導交班點存在嚴格的高度、速度和彈道傾角約束,簡化的定攻角優化方式并不適用,所以采用多項式剖面。但為減小優化維數,結合升阻系數計算方式(2),將攻角形式設置為與速度相關的函數。在此基礎上,引入彈目距離Dr倒數為自變量的修正項,從而在彈目距離足夠小時對攻角進行微調,確保終端條件得到滿足。
綜上,攻角剖面可以表示為以下形式:
式中:α1、α2、a3、a4為待優化參數;C1為初始值為0的標志位,若θ≥0°則恒為1。
飛行器首先由于C1默認為0 且Dr>Dr0執行α1指 令;當C1變 為1 且Dr>Dr0時執行α2指令,當Dr≤Dr0后執行α(V Dr)指令,攻角剖面如圖1所示。
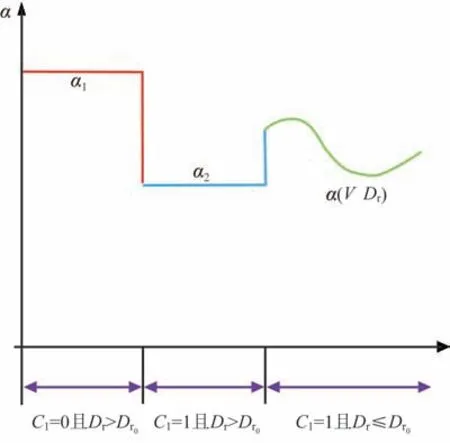
圖1 攻角剖面Fig.1 Sketch of the attack angle section
2.1.2 橫側向平面飛行策略方案
由于制造業企業所得稅結構受各國稅制結構因素的影響,因而制造業企業在稅基設置、稅率水平、稅前扣除、稅收優惠等方面也迥然不同。
橫側向平面策略函數優化傾側角剖面γ(t DrΔRi)。首先,為確保滑翔段末段彈道偏角滿足約束,設計自變量為彈目距離的彈道偏角過渡函數γc,通過平滑過渡的方式將彈道偏角轉至期望值ψf,確保在滑翔段末段彈道偏角滿足約束。
除此之外,為與禁飛區保持一定距離,設置了自變量為導彈與禁飛區斜距倒數的斥力場函數。當相對距離小于預設值ΔRimin后加入修正指令Δγ,確保不會進入禁飛區。
式中:b1、b2、b3、bi為待優化參數。
2.2 非線性參數規劃算法
考慮只含有等式約束條件的非線性規劃問題:
式中:c(x)為向量函數c(x)={c1(x),c2(x),…,cm(x)}T。
則拉格朗日函數為
可寫成如下形式:
若矩陣Bk是Hessian 矩陣L(xk,λk)的良好近似,則下式成為擬牛頓法的迭代公式:
上述的SQP 法,理論上只具有局部收斂性,為使其具有整體收斂性,則:
具體算法流程如圖2 所示:
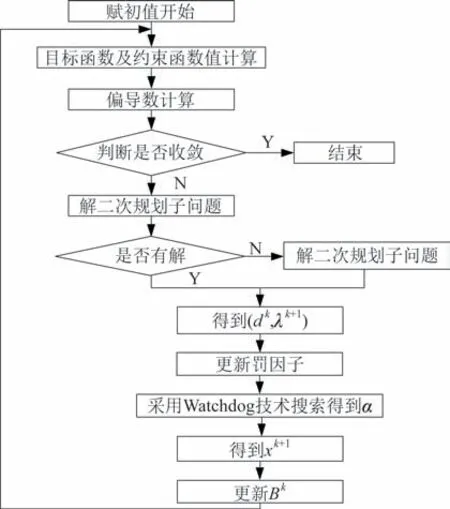
圖2 SQP 程序框圖Fig.2 Program chart of the SPQ algorithm
3 軌跡跟蹤制導律設計
將高度H、射擊系z項位移影響作為關注狀態量,引入位移微分項對狀態方程擴維,沿飛行軌跡線性化可得:
描述為狀態空間形式為
考慮飛行過程中與標稱軌跡的偏差,沿著e(t)=0,(t)=0 進行線性化可以得到
針對線性化后的時變系統,這里需要設計一個狀態反饋控制器:
通過線性二次型調節器配置反饋矩陣K,找到一組控制量u(t)。假設ATP+PA+Q+KTRK-KTBTP-PBK存在一個常量矩陣P使得:
令K=R-1BTP,則:
在此基礎上,通過求解黎卡提方程得到矩陣P與控制參數K,軌跡跟蹤制導律為以下形式:
4 仿真分析
4.1 仿真輸入
假設飛行器初始點經緯度為(0.0°,0.0°),計劃繞過經緯度為(4.7°,0.5°)、經緯度為(6.7°,0.7°)的兩個半徑為50 km 的禁飛區,并到達距離經緯度為(11.3°,1.0°)的目標點航程90 km 的中末制導交班點。結合上述情況,初始狀態見表2。
表2 初始狀態信息表Tab.2 Initial state information
這里設置如表3~表4 的過程、終端約束,以末速最大為優化指標,優化滿足所有約束的滑翔段軌跡。
表3 過程約束信息表Tab.3 Process constraint information
表4 終端約束信息表Tab.4 Terminal constraint information
4.2 軌跡優化仿真分析
滑翔軌跡如圖3 所示,由圖3 可知,飛行器能夠飛抵中末制導交班點,且能夠與上述禁飛區保持安全距離。

圖3 滑翔軌跡Fig.3 Gliding trajectory diagram
速度、高度-時間曲線如圖4 和圖5 所示,由圖4和圖5 可知,采用非線性參數優化算法飛行時間約為470 s,最大高度為初始點的50 km,末速為1 406 m/s。考慮到末速為本次優化指標,利用全局優化算法進行指標檢驗,在此基礎上開展兩者的優化計算效率對比分析。非線性參數規劃算法(470 s,1 406 m/s)相較于優化算法(463 s,1 412 m/s)末速減小0.4%,但是優化時間由原有162 s 減小為70 s,提升131.4%。
圖4 速度-時間曲線Fig.4 Speed-time curve

圖5 高度-時間曲線Fig.5 Height-time curve
彈道傾角-時間曲線如圖6 所示,由圖6 可知,標稱軌跡的終端彈道傾角為-3°位于終端約束范圍內,飛行器狀態滿足中末制導交班條件。
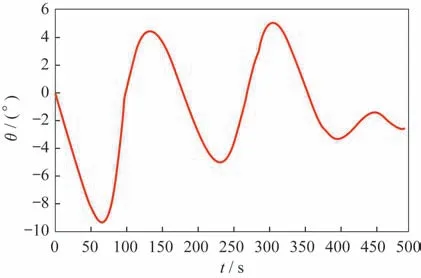
圖6 彈道傾角-時間曲線Fig.6 Trajectory inclination angle-time curve
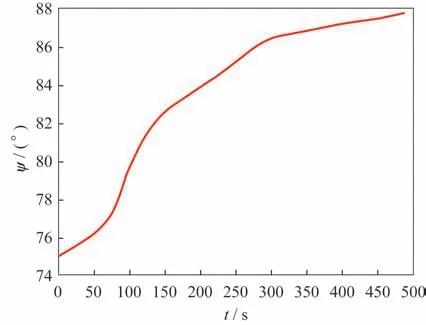
圖7 彈道偏角-時間曲線Fig.7 Trajectory declination angle-time curve
4.3 軌跡跟蹤仿真分析
考慮氣動不確定性的軌跡跟蹤仿真分析,驗證TLC 算法是否具有穩定跟蹤標稱彈道的能力。功角、傾側角-時間曲線如圖8 和圖9 所示,由圖8 和圖9 可知,在升力系數10%、阻力系數20%偏差的情況下,TLC 算法能夠基于當前時刻的位置、速度偏差解算修正指令,使得跟蹤誤差不發散。
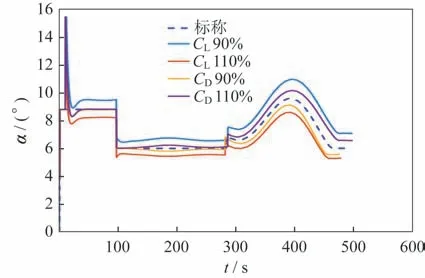
圖8 攻角-時間曲線Fig.8 Attack angle-time curve

圖9 傾側角-時間曲線Fig.9 Pitch angle-time curve
高度誤差、Z向位置誤差如圖10 和圖11 所示,由圖10 和圖11 可知,飛行器在拉偏情況下,實際軌跡與標稱軌跡Y、Z軸誤差全程均小于0.1 km,基于TLC 算法得到修正指令后能夠穩定跟蹤原有軌跡,從而確保飛行器精確到達中末制導交班點。
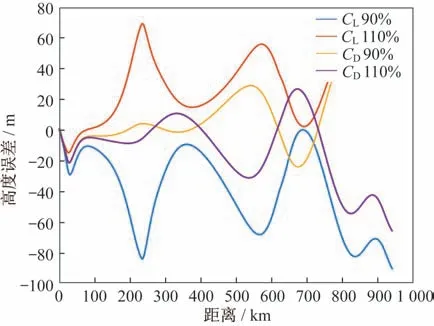
圖10 高度誤差-時間曲線Fig.10 Height error-time curve
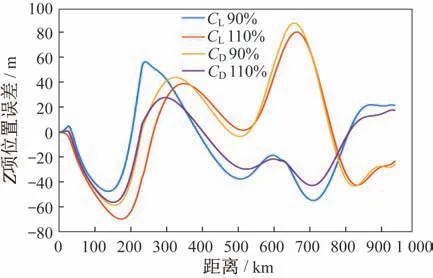
圖11 Z 向位置誤差Fig.11 Position error along the Z-axis
5 結束語
本文針對升力式飛行器滑翔段多約束航跡規劃問題,首先結合飛行器不同空域的任務需求及彈道特性,基于飛行策略預劃分手段提出針對不同飛行狀態的攻角、傾側角分段剖面函數。在此基礎上,利用序列二次規劃方法通過優化滿足過程、終端約束的剖面函數特征參數的方式,得到性能指標函數最優的控制構型剖面,從而完成多約束航跡規劃。最后,通過線性二次型控調節器實時解算位移誤差加權值最小的狀態跟蹤反饋控制器系數,完成考慮氣動不確定性的軌跡跟蹤制導律設計,從而為升力式飛行器多約束航跡規劃方案提供具備工程實用價值的技術途徑。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
公民與法治(2020年11期)2020-07-25 02:02:06
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41