考慮仿真步長延時的MMC高頻阻抗模型
2024-01-08 10:53:36伍雙喜閆斌杰楊銀國滿九方姚增慧謝小榮
電工電能新技術 2023年12期
關鍵詞:模型
伍雙喜, 閆斌杰, 楊銀國, 滿九方, 劉 洋, 姚增慧, 謝小榮
(1.廣東電網有限責任公司電力調度控制中心, 廣東 廣州 510600; 2.中國華能集團有限公司, 北京 100031; 3.清華大學電機工程與應用電子技術系, 北京 100084)
1 引言
基于我國可再生能源集約化開發與能源消費的逆向分布特征,柔性直流輸電憑借其在大容量、遠距離輸電方面的穩定性和經濟性優勢已成為我國跨區輸電的主要選擇[1]。近年來,在包含模塊化多電平換流器(Modular Multilevel Converter,MMC)的柔性直流輸電系統中,高頻振蕩事件頻發[2,3]。柔直系統高頻振蕩可能導致保護動作造成停電事故,進而引發大范圍潮流轉移,威脅電力系統的安全穩定運行,已經成為制約我國可再生能源發展的不利因素[4]。
為探究柔直系統高頻振蕩的產生機理,迫切需要建立分析適用的阻抗模型[5,6],其中模塊化多電平換流器的準確建模是關鍵[7]。模塊化多電平換流器內部控制環節復雜多樣,通常包括鎖相環、派克變換、外環控制、正序和負序電流內環控制、派克反變換和調制環節。此外,相比于傳統的兩電平或三電平換流器,受應用場景的限制,MMC設置了更長的控制鏈路延時。研究表明該延時對高頻阻抗特性的影響不可忽視[8]。
由于交流信號不具備傳統小信號模型線性化所需的直流工作點,因此早期的阻抗建模工作大多建立在dq坐標系下[9]。但是,dq坐標系下的阻抗模型在三相不平衡系統中交流時變,難以線性化;此外,dq坐標系下的阻抗模型沒有明確的物理意義,且無法直接測量得到,難以驗證理論推導結果的正確性。考慮到上述限制因素,后續研究大多采用諧波線性化方法建立abc坐標系下的小信號阻抗模型。文獻[10]考慮了鎖相環動態響應, 建立了abc坐標系下換流器的單入單出序阻抗模型。但是,換流器中不對稱控制環節導致頻率互補的分量間存在耦合,一維阻抗不適用于存在耦合關系的情況[11,12]。為解決此問題,文獻[13,14]分別在αβ坐標系和dq坐標系下建立了由二維傳遞函數表示的多入多出阻抗模型。但是,該矩陣中的元素沒有明確的物理意義,難以通過理論分析或時域仿真進行輔助驗證。在此基礎上,文獻[15,16]在 abc坐標系下建立了考慮頻率耦合效應的二維阻抗模型,利用非對角線元素表示兩個互補頻率分量之間的耦合關系。非對角線元素數值越大,耦合關系越明顯。然而,無論阻抗模型的維度如何,以往的阻抗建模過程僅考慮換流器的內部控制環節,未充分考慮仿真步長的影響,無疑會為高頻條件下的阻抗模型引入誤差。
MMC復雜的控制結構以及頻率耦合效應極大地提高了阻抗建模的難度,并且理論推導的模型正確性應能得到充分的驗證[17]。鑒于實際工程驗證的困難性,目前大多采用基于時域仿真的阻抗辨識方法進行驗證。文獻[18]利用阻抗辨識法驗證了次/超同步頻率范圍下頻率耦合阻抗模型的正確性[19,20]。然而,頻率越高,仿真步長延時對阻抗辨識結果影響越大。因此在高頻范圍內,需要仔細考慮延時影響,避免阻抗辨識結果不準確,無法驗證理論推導模型的正確性,不利于振蕩事件的機理分析。
針對上述問題,本文首先介紹了采用的MMC二端口頻率耦合阻抗模型,然后分析了仿真軟件內部延時對MMC高頻阻抗辨識的影響機理,進而提出了一種考慮仿真步長和控制延時的MMC阻抗建模方法。最后通過時域仿真進行檢驗,證明了所提出的建模方法在高頻條件下阻抗辨識結果的正確性,適用于對實際柔直系統高頻振蕩問題的分析。
2 MMC頻率耦合阻抗模型
2.1 MMC二端口頻率耦合阻抗模型
由于坐標變換固有的頻率變換機制以及鎖相環等不對稱控制環節,導致MMC交流側存在頻率耦合效應,如果在MMC交流側注入一個頻率為fp的小信號電壓擾動Vp,則MMC不僅會在其交流電流中產生頻率為fp的電流響應Ip,而且還會在其互補頻率2f1-fp處產生電壓、電流分量Vpc和Ipc來響應該擾動。現有的阻抗建模工作考慮頻率耦合效應后,建立MMC的二端口頻率耦合阻抗模型為:
(1)

2.2 MMC二端口頻率耦合阻抗模型的建立
本節采用諧波線性化方法在abc坐標系下建立MMC二端口頻率耦合阻抗模型,使其在高頻范圍下也具有準確性[21]。
首先,基于交流端口所注入的兩個頻率互補的諧波擾動,推導得到控制環節生成的參考電壓。在推導中,各環節輸入均以時域形式表達,經理論推導得到輸出結果后,再將其用頻域相量表示,進而可得不同環節的傳遞函數。
按照上述推導原則,可將外環控制環節表示為:
(2)

同理,可推導電流內環控制的傳遞函數。電流內環控制中的派克變換與外環控制的派克變換基本相同,僅增加了一個標幺化環節,因此電壓電流都以標幺值表示。電流內環控制包括PI環節、解耦環節以及電壓前饋環節。根據其控制結構,可將電流內環控制環節表示為:
(3)

根據式(3)可知,電流內環控制生成的dq軸參考電壓與dq軸電壓和電流分量以及外環控制生成的dq軸參考電流有關。此外,根據派克變換,dq軸電壓和電流分量可分別表示為:
(4)

(5)

聯立式(3)~式(5),換流器生成的三相參考電壓標幺值可表示為:
(6)
(7)

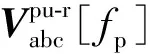
隨后,推導MMC輸出電壓與諧波擾動之間的傳遞函數矩陣,即差模回路公式的傳遞函數矩陣。MMC的單相拓撲結構如圖1所示,Lg為電網側等效電感,Rg為電網側等效電阻,每個橋臂含有N個子模塊,L0為橋臂電感,R0為橋臂等效電阻。
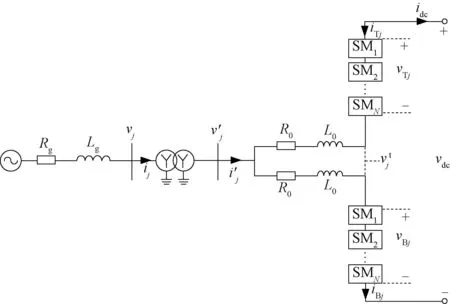
圖1 MMC單相拓撲結構Fig.1 Single phase topology of MMC

根據圖1可得MMC差模回路公式為:
(8)
由于諧波擾動在換流器變壓器網側注入,為推導MMC的阻抗模型,需建立換流變壓器網側和閥側的關系。由此,可建立兩個互補頻率下MMC的差模回路公式為:
(9)


Z=T-1A
(10)
同理可得柔直換流器頻率耦合導納模型為:
Y=A-1T
(11)
3 仿真步長延時對MMC高頻阻抗辨識的影響機理分析
目前常用的電磁暫態仿真軟件大多采用數值積分方法,設定的仿真步長將會影響MMC模型中各個控制環節的輸入和輸出結果,進而影響整個MMC阻抗模型的辨識結果。本節以PSCAD仿真軟件中的鎖相環控制環節為例,分析仿真步長的影響。鎖相環的控制結構如圖2所示,首先通過派克變換將網側三相電壓變換到dq坐標系下。然后,將派克變換得到的q軸電壓分量經PI控制環節、低通濾波環節和積分環節得到相角,并將該相角反饋給派克變換環節,直至達到一個穩定狀態,即可鎖定網側電壓的相角θPLL。此時,派克變換輸出的q軸電壓應接近于零。
圖2 鎖相環控制結構圖Fig.2 PLL control structure diagram
在換流器控制中,鎖相環鎖定的相角將用于后續外環控制和電流內環控制的派克變換中。為研究仿真步長對后續環節的影響,對比了以下兩種情況:一種是設置鎖相環為前序環節,使用鎖相環輸出相角對網側電壓進行派克變換,派克變換使用的相角經歷了仿真延時環節;另一種是不設置前序鎖相環環節,直接使用未經仿真延時的相角對網側電壓進行派克變換。使用的鎖相環模型參數見表1,表1中,TPLL為鎖相環低通濾波環節截止頻率的倒數。二者時域仿真的對比結果如圖3所示。如果忽略仿真步長延時的影響,兩種情況下派克變換環節的輸入電壓和相角相同,所得到的d軸和q軸電壓分量應該一致。
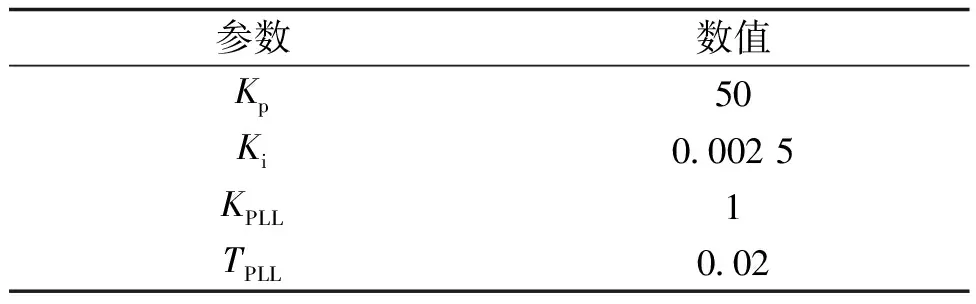
表1 鎖相環控制參數Tab.1 Control parameters of PLL
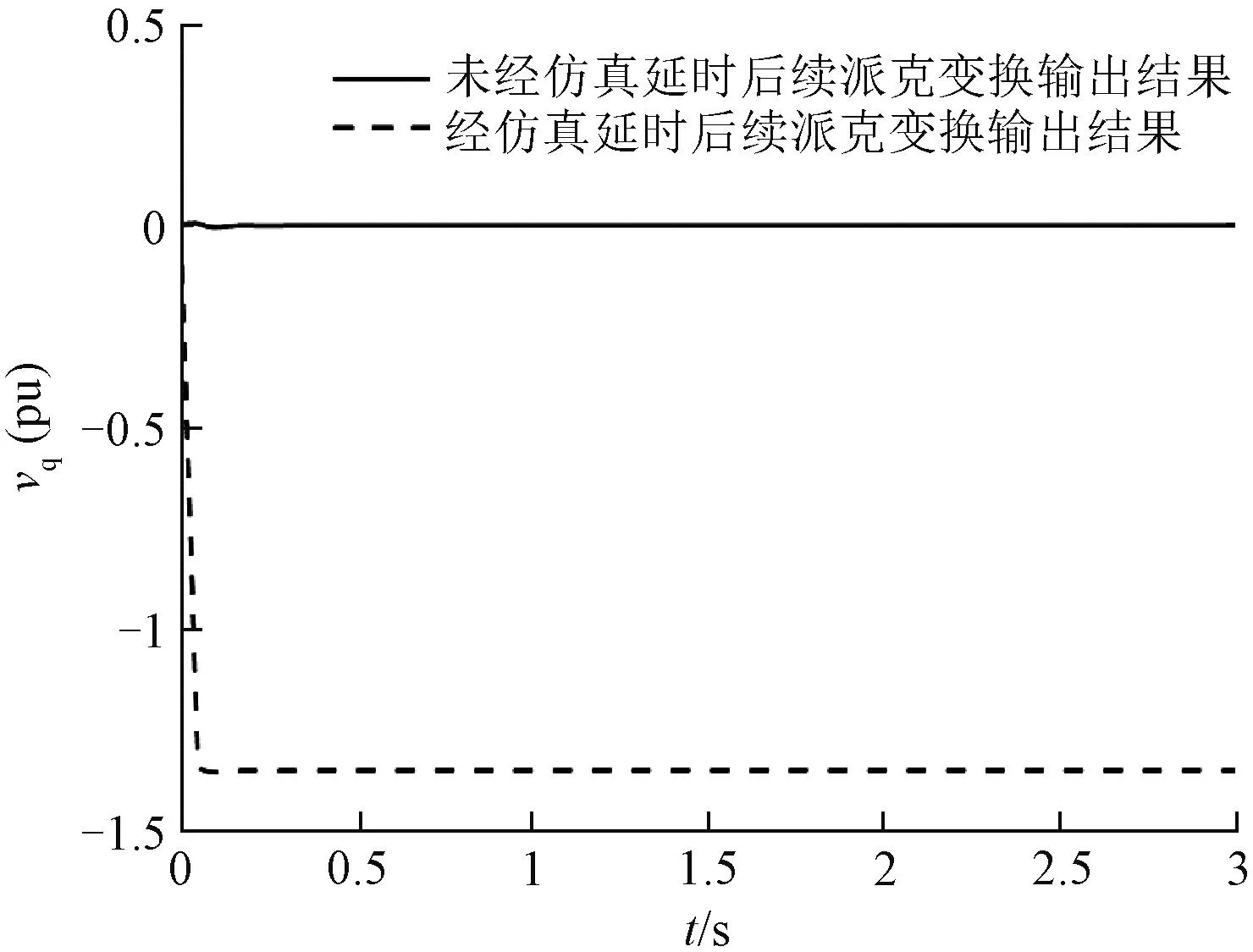
圖3 q軸電壓分量的對比Fig.3 Comparison of q-axis voltage components
根據圖3所示結果,兩種情況下派克變換輸出的q軸電壓分量穩定后存在明顯差異,說明仿真步長延時將會影響后續環節的輸入輸出。而每種情況下q軸電壓分量在穩定前都經歷了一個時長約為0.1 s的過渡階段,這是由于軟件內部采用離散化算法所致,不會直接輸出穩定結果。如果將鎖相環輸出的相角超前一個仿真步長,再代入后續網側電壓的派克變換,即可得到與時域仿真中相同的輸出結果。因此,在理論推導中,如果某個環節的輸入與前序環節有關,該環節的輸入應超前一個仿真步長以保證與時域仿真結果的一致性。
根據圖2所示的鎖相環控制結構,采用諧波線性化方法建立鎖相環的傳遞函數。考慮兩個頻率互補的諧波分量后,q軸電壓中諧波分量可表示為:
(12)
式中,V1為電壓基波分量幅值;ω1為基波角頻率;ωp為擾動角頻率;Vp為角頻率ωp處電壓分量幅值;φp為角頻率ωp處的電壓分量初相角;ωpc為擾動角頻率的互補角頻率;Vpc為角頻率ωpc處的電壓分量幅值;φpc為角頻率ωpc處的電壓分量初相角;θPLL為派克變換使用的鎖相環相角。
由式(12)可知,諧波電壓擾動將在q軸電壓中產生頻率為fp-f1的諧波分量。根據鎖相環控制結構,該諧波分量將產生同頻的相角擾動。鎖相環的輸出相角可表示為:
θPLL(t)=ω1t+Δθ(t)
(13)
Δθ(t)=AΔθcos(ωpt-ω1t+φΔθ)
(14)
式中,AΔθ為角頻率ωp-ω1處的電壓分量幅值;φΔθ為角頻率ωp-ω1處的電壓分量初相角。
將式(13)代入式(12),并忽略二階及以上階數的諧波分量后可得:
(15)
在頻域下,可將式(15)表示為:
(16)
鎖相環內部的PI控制環節、低通濾波器環節、積分環節的傳遞函數為:
(17)
q軸電壓與鎖相環輸出相角之間的關系為:
Δθ=HPLL(sp-s1)ΔVq
(18)
式中,HPLL(sp-s1)為鎖相環輸出相角與q軸電壓的傳遞函數。
將式(16)代入式(18),可推導得:
(19)
式中,閉環傳遞函數為:
(20)
盡管上述推導考慮了時域仿真中鎖相環的各個環節,理論推導和時域仿真的結果仍存在較為明顯的差異。考慮到仿真步長延時的影響,在鎖相環輸出中附加一個仿真步長延時環節,如圖2所示。此時,鎖相環輸出相角的理論推導結果與時域仿真結果在寬頻范圍下可保持一致。進一步推廣,為了與時域仿真結果對應,在理論推導中,每個控制環節的輸出均應延時一個仿真步長。
根據本節的分析結果,仿真軟件內部的仿真步長延時對控制環節的輸入輸出結果會產生較大影響。為了與時域仿真結果對應,在對相關環節進行建模時,每個控制環節的輸出均應延時一個仿真步長,而輸入則取決于與前序環節的關聯性。
4 考慮仿真步長和控制延時的MMC模型
4.1 考慮仿真步長對控制環節的修正
由上述分析可知,在時域仿真中仿真步長延時將影響各個環節的輸入和輸出。如果在阻抗建模時忽略仿真步長的影響,理論推導結果和時域仿真中的阻抗辨識結果難以在高頻范圍下保持一致,無法相互驗證各自的準確性。因此,在阻抗建模過程中考慮仿真步長延時對于各個環節輸入和輸出的影響十分必要。根據各環節輸入量是否與前序環節的輸出有關,仿真步長延時可分為兩種情況考慮:
(1)輸入量與前序環節輸出無關
當某控制環節的輸入量與前序環節無關時,該環節的輸入量無需考慮仿真步長的影響。該環節的輸出量需延時一個仿真步長,等效仿真軟件內部計算延時。
(2)輸入量與前序環節輸出有關
當某控制環節的輸入量與前序環節有關時,該環節的輸入量需超前一個仿真步長來補償前序環節的內部計算延時,保證時域仿真中各環節的計算能夠在同一時刻進行;輸出量則需延時一個仿真步長,等效仿真軟件內部計算延時。
需要注意的是,對于線性環節且輸入量與輸出量的頻率完全相同時,輸入量的超前和輸出量的滯后可以相互抵消,無需考慮仿真步長的影響,如PI控制等環節。
4.2 考慮仿真步長的MMC頻率耦合阻抗模型
采用諧波線性化方法在abc坐標系下建立考慮仿真步長和控制延時的MMC頻率耦合阻抗模型。首先,基于交流端口所注入的兩個頻率互補的諧波擾動,推導得到控制環節生成的參考電壓。隨后,根據MMC差模電壓回路建立MMC輸出電壓與外部注入諧波擾動之間的關系。最后,將上述結果聯立,建立MMC的頻率耦合阻抗模型。建模方法流程如圖4所示,具體步驟如下:
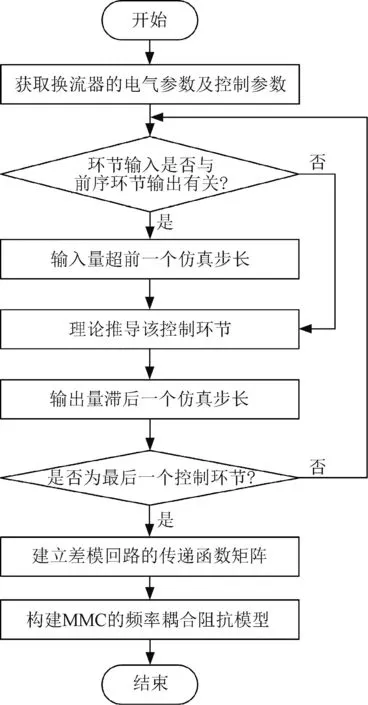
圖4 阻抗建模方法流程圖Fig.4 Flow chart of impedance modeling method
步驟1:收集目標柔直系統的換流器電氣參數,通常包括換流變壓器參數、橋臂電阻、橋臂電抗等。
步驟2:收集目標柔直系統的換流器控制參數,包括鎖相環控制參數、外環控制參數、電流內環控制參數、調制比和控制鏈路延時等。
稱取10 g經預處理的絲瓜絡纖維,在室溫下平衡24 h后稱重,然后置于50℃的烘箱中,纖維開始放濕,每5 min稱量一次,當前后兩次重量之差小于5%時,則已達到平衡。此時的重量為干燥重量,計算回潮率,結果見表1。
步驟3:推導控制環節傳遞函數。按照MMC各個控制環節的建模過程進行推導。需要注意的是,在推導過程中需考慮仿真步長的影響,對輸入和輸出進行修正。例如,在鎖相環推導中,進一步考慮仿真步長影響,加入延時環節,可將鎖相環開環傳遞函數修正為:
(21)
式中,Td為鎖相環延時的時間常數。
修正后得到的鎖相環輸出相角與時域仿真結果完全一致。
步驟4:推導MMC輸出電壓與諧波擾動之間的傳遞函數矩陣,即差模回路公式的傳遞函數矩陣。
步驟5:將上述結果聯立,構建MMC的頻率耦合阻抗模型,如式(10)所示。
5 仿真驗證
為驗證前述所提出的考慮仿真步長延時的MMC頻率耦合阻抗模型理論推導結果的正確性,本節在電磁暫態仿真平臺進行MMC的阻抗辨識,仿真步長設為10 μs。
以典型的柔性直流輸電系統拓撲為例,如圖5所示,在PSCAD/EMTDC電磁仿真平臺中搭建了單端換流器的非線性仿真模型,兩側分別接入理想的交流電網和直流電網。MMC具體拓撲結構如圖6所示。其中,換流器額定容量為1 000 MW,直流電壓等級為±350 kV,橋臂電感為105 mH;換流變壓器采用單相雙繞組變壓器組,額定容量為3×375 MW,變壓器變比為525 kV/375 kV,漏抗為0.14 pu;換流器詳細參數見表2。
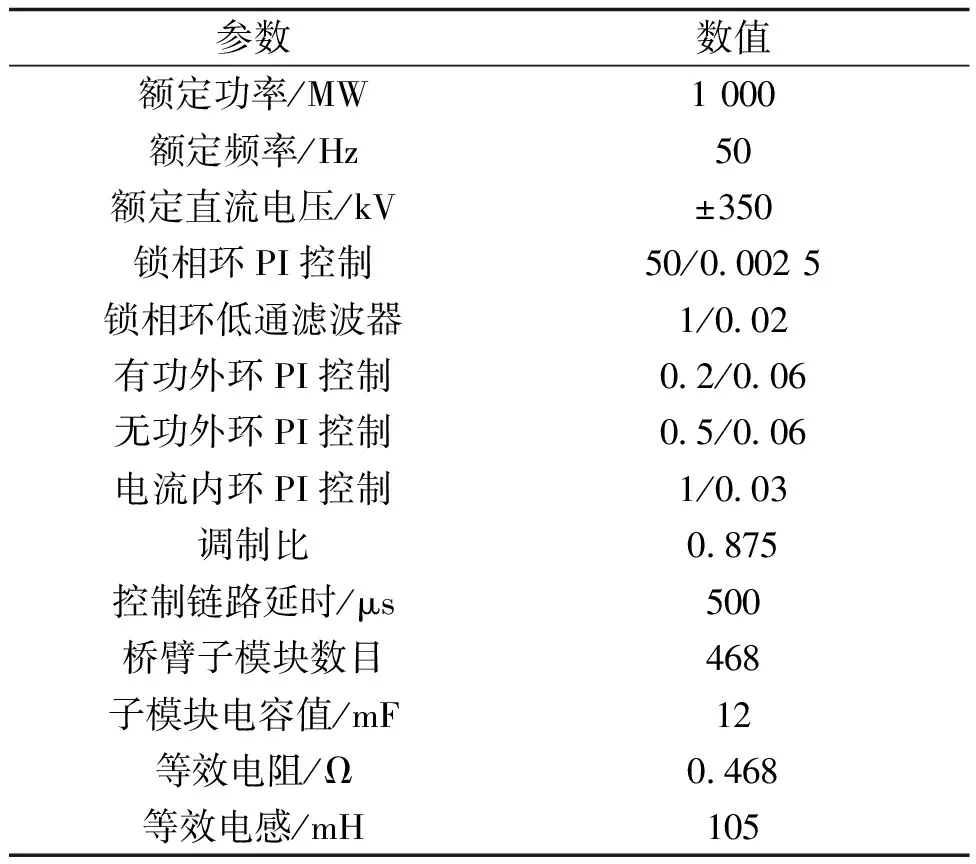
表2 換流器參數Tab.2 Parameters of MMC
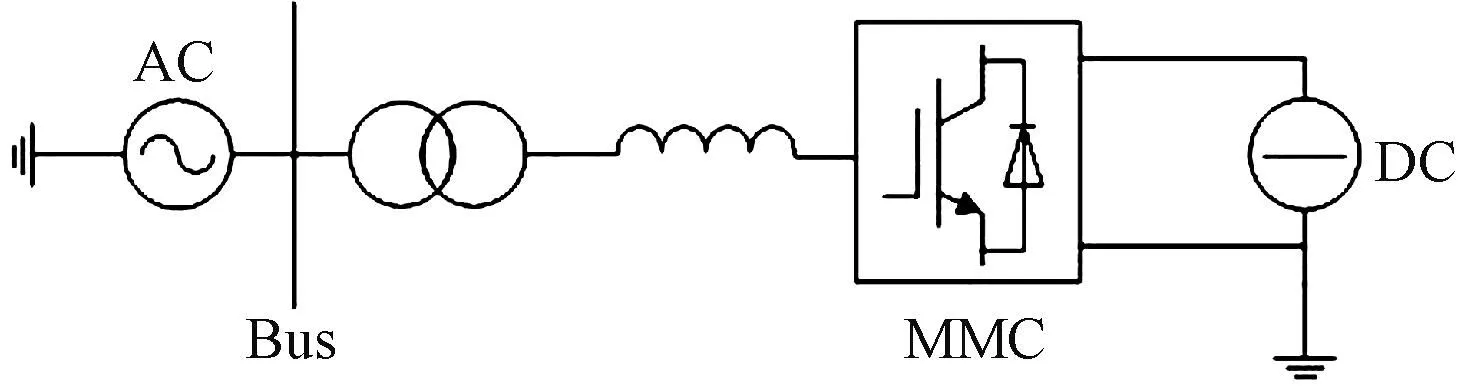
圖5 單端柔性直流輸電系統仿真結構Fig.5 Simulation structure of single-ended flexible MMC-HVDC transmission system
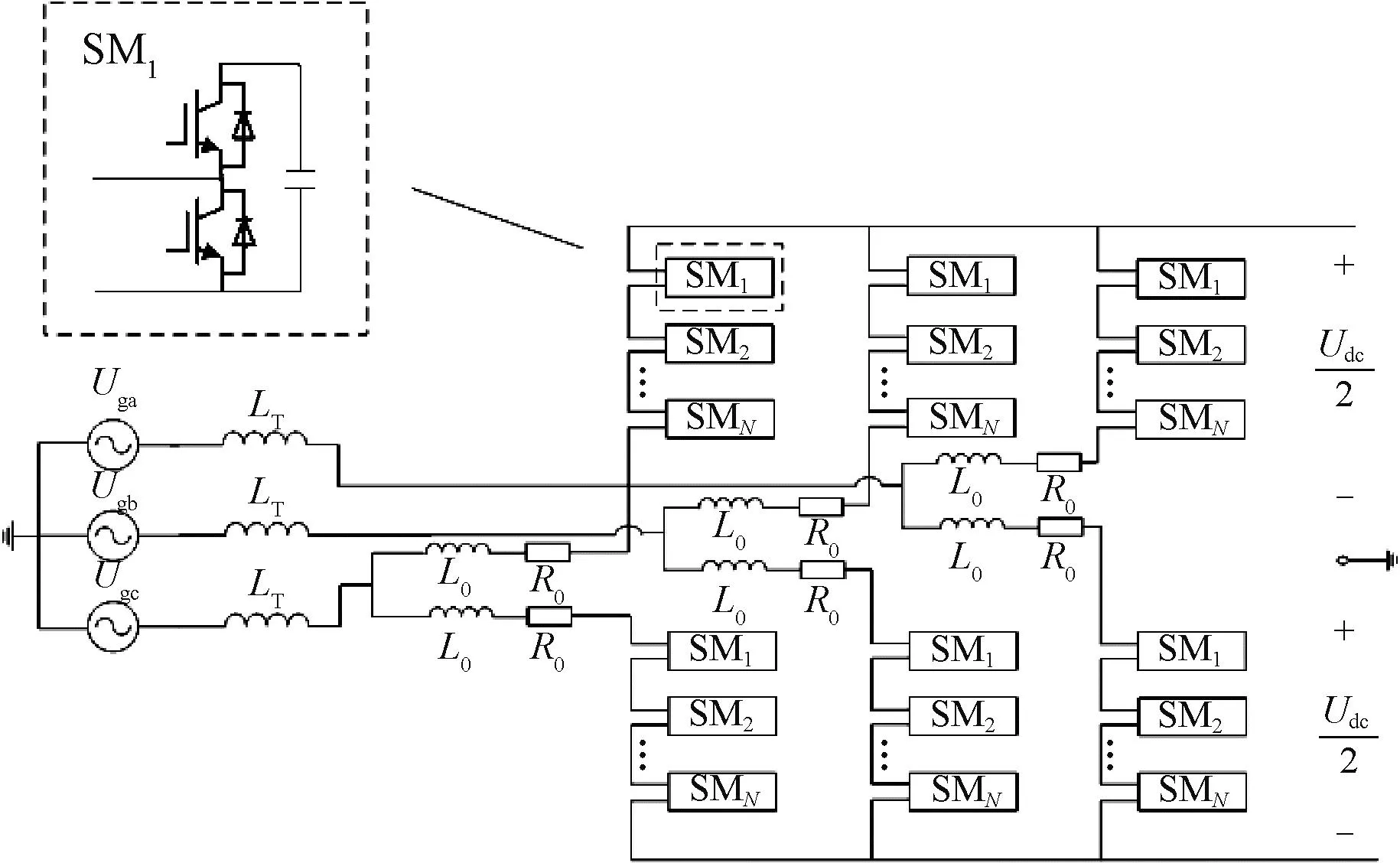
圖6 MMC仿真拓撲Fig.6 MMC simulation topology

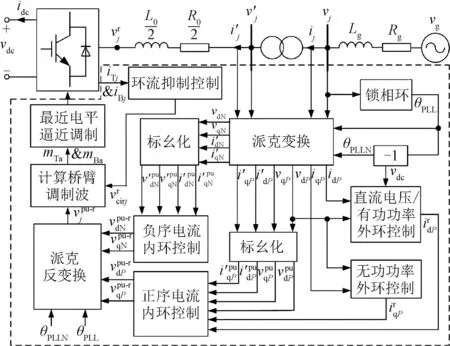
圖7 MMC控制結構框圖Fig.7 MMC control structure block diagram
分別在考慮仿真步長延時和不考慮仿真步長延時兩種情況下,通過理論推導得到了換流器的頻率耦合阻抗模型,二者與時域仿真中的阻抗辨識結果在高頻(1 000~2 000 Hz)范圍內的對應結果如圖8所示。圖8中,R表示實部,I表示虛部。
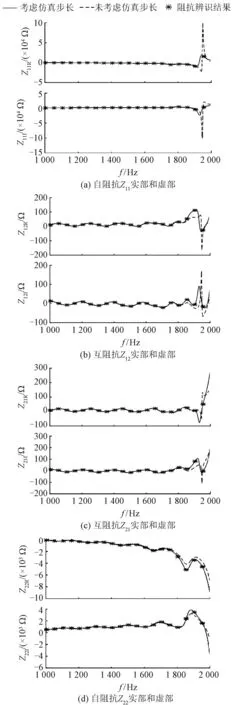
圖8 兩種情況下理論推導和阻抗辨識結果的對比Fig.8 Comparison between theoretical derivation and impedance identification
圖8結果顯示,仿真步長延時將影響換流器在高頻下的阻抗特性。考慮仿真步長延時后,換流器頻率耦合阻抗模型的理論推導結果與時域仿真中的阻抗辨識結果在高頻范圍下仍保持高度一致。若不考慮仿真步長,理論推導結果與時域仿真中的阻抗辨識結果在高頻范圍下將存在明顯的誤差。對比結果表明,本文所提出的考慮仿真步長延時的MMC頻率耦合阻抗模型能夠與阻抗辨識結果在高頻下相互驗證各自的準確性,具有較強的應用價值,可應用于實際柔直系統高頻振蕩的穩定性分析。
6 結論
針對高頻范圍下理論推導阻抗模型與時域仿真中的阻抗辨識結果無法相互對應的問題,提出了考慮仿真步長延時的阻抗建模方法,并建立了考慮仿真步長和控制鏈路延時的MMC頻率耦合阻抗模型。在理論推導過程中,分析了仿真延時對MMC控制環節的輸入和輸出的影響并對模型進行修正。最終的仿真結果表明,考慮仿真步長和控制鏈路延時后的MMC模型與阻抗辨識結果在高頻范圍內保持一致,證明了該模型的正確性,解決了仿真步長導致的阻抗辨識的高頻偏差問題,可用于柔直系統高頻振蕩的穩定性分析。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19