
一種雙螺桿壓縮機(jī)轉(zhuǎn)子型線檢測裝置的設(shè)計*
2024-01-09 05:08:36薛銘軒竇天赤敬小宇
機(jī)電工程技術(shù) 2023年12期
關(guān)鍵詞:檢測
程 亮,薛銘軒,竇天赤,敬小宇
(衢州學(xué)院機(jī)械工程學(xué)院,浙江衢州 324000)
0 引言
雙螺桿壓縮機(jī)廣泛應(yīng)用于化工、礦山、冶金、動力、機(jī)械、制冷、建筑等工業(yè)領(lǐng)域,其銷量占所有容積式壓縮機(jī)的80%以上[1],隨著工業(yè)技術(shù)的發(fā)展,社會對螺桿壓縮機(jī)整體性能的要求也越來越高[2]。機(jī)頭是雙螺桿壓縮機(jī)的執(zhí)行機(jī)構(gòu),其中相互嚙合的陰陽螺桿轉(zhuǎn)子是壓縮機(jī)最核心的機(jī)械零件,壓縮機(jī)整體性能的提高主要取決于轉(zhuǎn)子型線的精度與設(shè)計[3]。研究表明,轉(zhuǎn)子型線的加工精度和表面質(zhì)量要求極高,機(jī)械加工非常困難、效率低,加工成本占設(shè)備總成本的30%~50%[4-5],故轉(zhuǎn)子型線加工誤差檢測與加工精度控制對行業(yè)發(fā)展有著非常重要的戰(zhàn)略意義。
1 國內(nèi)外研究現(xiàn)狀
1.1 國外研究現(xiàn)狀
國外關(guān)于螺桿壓縮機(jī)轉(zhuǎn)子型線檢測技術(shù)研究方面,英國的HOLRODY[6]和德國的KAPP[7]都在自產(chǎn)的轉(zhuǎn)子磨床上開發(fā)了在線檢測功能,在轉(zhuǎn)子型線加工過程中實時將檢測數(shù)據(jù)反饋到加工系統(tǒng)中,在線對加工誤差進(jìn)行補(bǔ)償,這種檢測方式由于熱變形、污染等因素只能對加工誤差進(jìn)行補(bǔ)償控制,不能用于成品的高精度合格檢測,且存在一定程度的技術(shù)保密。瑞典HEXAGON[8]集團(tuán)旗下的LEITZ系列[9]超高精度坐標(biāo)測量機(jī)可在不裝載轉(zhuǎn)臺的情況下實現(xiàn)轉(zhuǎn)子型線自動測量,其優(yōu)點是安裝方式簡單,缺點是多探針測量、機(jī)械結(jié)構(gòu)復(fù)雜、調(diào)試繁瑣,增加了檢測時間和累積誤差,只能得到關(guān)鍵特征數(shù)據(jù),不合適企業(yè)大批量高精度檢測需求。
1.2 國內(nèi)研究現(xiàn)狀
國內(nèi)目前對螺桿壓縮機(jī)轉(zhuǎn)子型線檢測開展的研究工作多處于理論研究階段,較少有針對實際應(yīng)用開展的檢測技術(shù)研究。其中,張正華等[10]主要研究了螺桿轉(zhuǎn)子型線的數(shù)字化測量和數(shù)據(jù)處理等問題,提出了基于迭代法測量轉(zhuǎn)子型線的新方法。周正卿等[11]研究了轉(zhuǎn)子型線接觸式和非接觸式測量的方法,研制了螺旋轉(zhuǎn)子型線測量儀,可以完成型線輪廓掃描測量。王小明等[12]結(jié)合MATLAB 和C++軟件開發(fā)出了能夠計算6 種典型型線的轉(zhuǎn)子檢測模塊。
綜上所述,國內(nèi)外在螺桿壓縮機(jī)轉(zhuǎn)子型線檢測、加工方面都有一定的研究,但相對而言國內(nèi)研究技術(shù)還不成熟,主要偏重于探索性理論研究,實際應(yīng)用較少。國外研究公開的具體技術(shù)細(xì)節(jié)較少,存在一定程度的技術(shù)保密。為此,設(shè)計一種基于多自由度電動轉(zhuǎn)臺與直角坐標(biāo)臂單探針聯(lián)動的接觸式轉(zhuǎn)子型線檢測裝置,能夠獲得轉(zhuǎn)子型線加工尺寸與目標(biāo)尺寸之間的差值,實現(xiàn)雙螺桿壓縮機(jī)轉(zhuǎn)子型線高精度、高效率的檢測,減少高品質(zhì)轉(zhuǎn)子型線的加工誤差,提高加工精度,為自主研發(fā)高端螺桿壓縮機(jī)產(chǎn)品提供核心技術(shù)支持。
2 總體設(shè)計分析
2.1 檢測分析
如圖1 所示,雙螺桿壓縮機(jī)轉(zhuǎn)子是斜嚙合的正齒輪[13],表面形狀是螺旋形曲面,截面型線構(gòu)成復(fù)雜,其精加工通常采用微量磨削的方法,磨削誤差是影響轉(zhuǎn)子加工精度的關(guān)鍵因素。因此,對影響磨削量的加工誤差進(jìn)行精確檢測是首先要解決的問題。
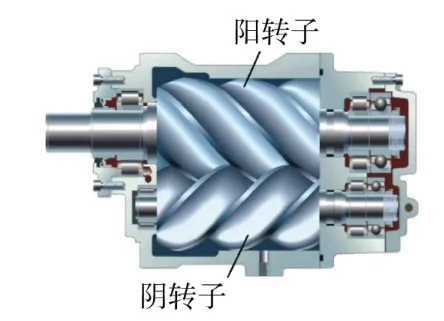
圖1 雙螺桿壓縮機(jī)機(jī)頭剖視圖[14]
傳統(tǒng)的單軸固定多探針檢測方法,轉(zhuǎn)子簡單固定在三爪卡盤上方,轉(zhuǎn)子的橫向自由度很難精準(zhǔn)確定;多探針組合結(jié)構(gòu)復(fù)雜、連接點多、累積誤差高。鑒于此,本裝置采用自動轉(zhuǎn)臺與單探針聯(lián)動的方法,在機(jī)械結(jié)構(gòu)方面涉及高精度自動轉(zhuǎn)臺設(shè)計、位移傳感器與自動轉(zhuǎn)臺信號同步設(shè)計,慢速回轉(zhuǎn)運(yùn)動狀態(tài)下恒定準(zhǔn)確傳輸位移信號控制,最終實現(xiàn)連接點少、結(jié)構(gòu)簡單的單探針與自動轉(zhuǎn)臺組合快速、準(zhǔn)確的檢測。
2.2 工作原理
如圖2 所示,本裝置主要組成部分為電動卡盤、分度轉(zhuǎn)臺、移動平臺、工作臺、控制系統(tǒng)、直角坐標(biāo)臂和檢測探針等。整套裝置的工作原理:根據(jù)控制系統(tǒng)發(fā)出的指令,利用外接電源驅(qū)動移動平臺和直角坐標(biāo)臂電機(jī)旋轉(zhuǎn),帶動傳動絲桿和同步帶作直線位移,使檢測探針和轉(zhuǎn)子移動到適合檢測的位置,然后驅(qū)動安裝有探針的直角坐標(biāo)臂和安裝有轉(zhuǎn)子的電動轉(zhuǎn)臺根據(jù)檢測要求作相應(yīng)的姿態(tài)和位移變換,使探針和轉(zhuǎn)子接觸,實現(xiàn)轉(zhuǎn)子型線檢測;通過安裝在直角坐標(biāo)臂內(nèi)的光柵尺和電機(jī)上的旋轉(zhuǎn)編碼器保證檢測精度。
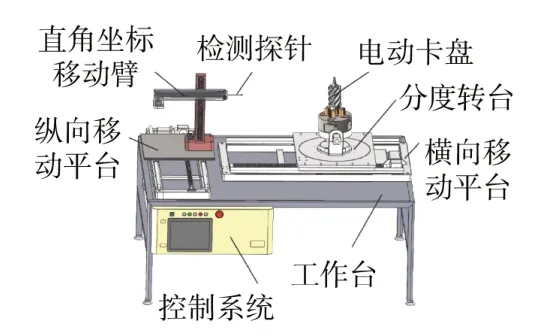
圖2 雙螺桿壓縮機(jī)轉(zhuǎn)子型線檢測裝置示意
3 檢測平臺設(shè)計
如圖3所示,檢測平臺采用笛卡爾直角坐標(biāo)型結(jié)構(gòu)設(shè)計,主要包括安裝在基座上的縱向移動平臺以及安裝有吸盤、檢測探針、傳感器等檢測模塊的立柱和橫臂。
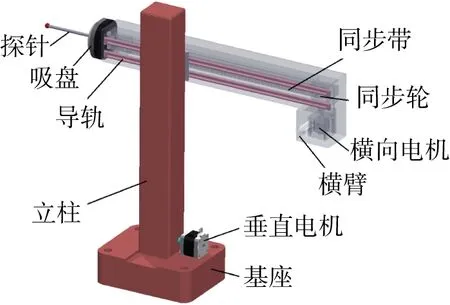
圖3 檢測平臺
3.1 移動模塊
檢測探針的移動模塊是一個直角坐標(biāo)型3T 移動機(jī)構(gòu),基座采用電機(jī)、聯(lián)軸器、滾珠絲桿的傳動方式進(jìn)行縱向移動;垂直方向和橫向十字臂采用電機(jī)、聯(lián)軸器、同步帶輪的方式進(jìn)行垂直和橫向移動,通過電機(jī)后端的光電編碼器實現(xiàn)粗校準(zhǔn);其中探針通過磁吸的方式安裝在橫臂末端法蘭盤上。
3.2 檢測模塊
檢測模塊主要由檢測探針、吸盤、光柵尺及信號傳輸裝置等組成,探針通過末端外螺紋和吸盤中心螺紋孔剛性連結(jié),吸盤通過電磁吸的方式和橫向機(jī)械臂末端的法蘭盤連結(jié);基座平臺的縱向軸、垂直軸及安裝探針的橫向軸都帶有高精度光柵尺,保證檢測精度。
4 轉(zhuǎn)子平臺設(shè)計
轉(zhuǎn)子平臺的結(jié)構(gòu)主要包括兩部分:(1)帶有1 個橫向移動平臺、1 個平面旋轉(zhuǎn)平臺和1 個翻轉(zhuǎn)平臺的2R1T移動機(jī)構(gòu);(2)1 個根據(jù)特定型號螺桿壓縮機(jī)轉(zhuǎn)子定制的四爪電動卡盤(安裝模塊)。
4.1 移動模塊
圖4 所示為轉(zhuǎn)子平臺的移動模塊,其主要作用是驅(qū)動雙螺桿壓縮機(jī)轉(zhuǎn)子移動到探針能夠檢測的位置和姿態(tài)。該模塊工作過程:電機(jī)驅(qū)動移動平臺作橫向運(yùn)動,利用傳動絲桿的高轉(zhuǎn)速、大導(dǎo)程快速接近檢測探針;通過帶有分度臺的旋轉(zhuǎn)平臺和安裝磁吸卡盤的翻轉(zhuǎn)平臺使壓縮機(jī)轉(zhuǎn)子旋轉(zhuǎn)到轉(zhuǎn)子型線可檢測的位置和姿態(tài);通過檢測探針的直角坐標(biāo)3T 機(jī)構(gòu)和轉(zhuǎn)子平臺2R1T 機(jī)構(gòu)聯(lián)動實現(xiàn)轉(zhuǎn)子型線檢測。

圖4 轉(zhuǎn)子移動模塊
4.2 安裝模塊
圖5 所示為轉(zhuǎn)子的安裝模塊,其主要作用是通過四爪電動卡盤連結(jié)轉(zhuǎn)子和翻轉(zhuǎn)平臺。該模塊工作過程:卡盤殼體內(nèi)部中心位置的伺服電機(jī)驅(qū)動正方形聯(lián)動機(jī)構(gòu)作旋轉(zhuǎn)運(yùn)動;聯(lián)動機(jī)構(gòu)帶動連接在機(jī)構(gòu)四角位置的L 形聯(lián)動曲軸做旋轉(zhuǎn)運(yùn)動;曲軸將聯(lián)動機(jī)構(gòu)傳遞的旋轉(zhuǎn)運(yùn)動,通過曲柄幾何形狀的改變,轉(zhuǎn)換成直線運(yùn)動,傳遞給連接在曲軸末端的4 個卡爪,從而帶動卡爪在卡盤殼體上部的H形導(dǎo)槽內(nèi)向轉(zhuǎn)子移動合攏,達(dá)到固定轉(zhuǎn)子的目的。

圖5 轉(zhuǎn)子安裝模塊
5 控制系統(tǒng)設(shè)計
控制系統(tǒng)是整套裝置運(yùn)動控制和信息傳輸?shù)幕A(chǔ),是實現(xiàn)檢測過程和保證檢測精度的核心部件。由于涉及的零部件眾多,含有各種微小的電子元器件,把控制系統(tǒng)集成在一個定制的亞克力控制盒內(nèi),主要包括驅(qū)動模塊和控制模塊兩部分。
5.1 驅(qū)動模塊
驅(qū)動模塊主要分為兩部分,第一部分是整套裝置的供電驅(qū)動,采用220 V外接通用電源;第二部分是控制系統(tǒng)的離線編程模塊,采用鋰電池作為動力源。本次設(shè)計采用的鋰電池具有過流、過壓、低壓、短路等保護(hù)功能,容量為11 200 mAh,電壓為12 V,電芯組合方式為12S1P,質(zhì)量為590 g,尺寸為75 mm×58 mm×67 mm。由于體積較小,可直接安裝在控制系統(tǒng)內(nèi)部。在控制系統(tǒng)表面,制作了電池充電接口和充電指示燈,根據(jù)不同的顏色顯示,確定電池充電狀態(tài)。為了滿足控制板、電機(jī)、信號指示燈、開關(guān)等不同電子元器件對電壓的要求,在控制系統(tǒng)中還配置了調(diào)壓模塊。
5.2 控制模塊
如圖6 所示,控制模塊采用樹莓派4B 控制板作為主控制,通過板載的USB 接口連接傳感器、電機(jī)控制板、調(diào)壓模塊、操縱桿、鼠標(biāo)鍵盤等,實現(xiàn)樹莓派控制板對整套裝置驅(qū)動系統(tǒng)、傳感系統(tǒng)的控制,并將檢測數(shù)據(jù)存儲于板載內(nèi)存或SD 卡中,通過HDMI 接口連接7 寸觸摸屏,可以在觸摸屏中更改操作方式,實現(xiàn)操縱桿控制模式、語音輔助模式、手機(jī)APP 虛擬操縱桿控制模式。

圖6 樹莓派示意圖[14]
根據(jù)MODBUS 通信協(xié)議進(jìn)行電機(jī)控制,采用USBRS485轉(zhuǎn)接口,以樹莓派控制板為主機(jī),檢測探針平臺3個電機(jī)及轉(zhuǎn)子移動平臺4個電機(jī)作為從機(jī)進(jìn)行主從機(jī)通信,控制單個或多個電機(jī)轉(zhuǎn)動,實現(xiàn)位移和姿態(tài)的精確定位[15]。
其中,操縱桿控制模式是基礎(chǔ)模式,通過操縱桿手動驅(qū)動電機(jī),可實現(xiàn)檢測平臺和轉(zhuǎn)子平臺快速定位到檢測范圍之內(nèi),通過操縱桿微調(diào)可確定探針和轉(zhuǎn)子之間的相對位置關(guān)系(建立坐標(biāo)系)。手機(jī)APP 虛擬操縱桿控制模式是一種遠(yuǎn)程控制模式,通過安裝在手機(jī)端的輔助檢測軟件,在物理操縱桿失靈和檢測過程需急停時使用。語音輔助模式是一種通過語音交互技術(shù)實現(xiàn)檢測狀態(tài)的遠(yuǎn)程控制功能[16],在一些不需要發(fā)生物理硬件接觸和定位精度控制的場合,采用語音輔助,可有效提高檢測效率。其工作原理:將功能所需的語音通過移動電話錄音功能錄入為MP3文件;將MP3文件轉(zhuǎn)為無損的WAV文件上傳至與樹莓派連接的智能語音識別控制模塊[17];點擊觸摸屏上事先編輯好的“語音模式”按鈕,開啟語音輔助模式,通過智能語音識別控制模塊解析語音、提煉關(guān)鍵字與預(yù)設(shè)字詞進(jìn)行比對,完成識別[18],并對所需的功能進(jìn)行控制。
6 實驗測試
圖7 所示為轉(zhuǎn)子型線檢測控制軟件。通過樹莓派控制板內(nèi)的檢測控制軟件及直角坐標(biāo)(三坐標(biāo))檢測軟件PC-DMIS[19],控制轉(zhuǎn)子型線檢測裝置的運(yùn)動和檢測。

圖7 轉(zhuǎn)子型線檢測控制軟件
實驗測試過程主要分為以下幾個步驟。
步驟1:打開電源,啟動樹莓派控制板,打開觸摸屏,通過觸摸屏或者鼠標(biāo)打開檢測控制軟件,控制PCDMIS檢測軟件,驅(qū)動直角坐標(biāo)檢測平臺回參考點;通過檢測控制軟件,驅(qū)動轉(zhuǎn)子移動平臺回參考點。
步驟2:轉(zhuǎn)子安裝,通過觸摸屏或者鼠標(biāo),對檢測控制軟件進(jìn)行控制,點擊“卡盤開合”按鈕驅(qū)動電動四爪卡盤鎖緊,將需檢測的螺桿轉(zhuǎn)子固定在安裝平臺上。
步驟3:建立坐標(biāo)系,首先,通過物理操縱桿或者語言輔助模式,驅(qū)動移動平臺,使探針和轉(zhuǎn)子快速移動到檢測位置附近;然后,通過檢測控制軟件和物理操縱桿(或虛擬操縱桿)微調(diào)建立探針和轉(zhuǎn)子之間的坐標(biāo)系,確定相互位置關(guān)系。
步驟4:轉(zhuǎn)子檢測,首先,在PC-DMIS 檢測軟件中調(diào)用預(yù)先編輯好的檢測程序,進(jìn)行轉(zhuǎn)子型線自動檢測;檢測結(jié)束后,通過物理操縱桿或者語言輔助模式,使檢測探針和轉(zhuǎn)子平臺移動到安全位置;最后,生成檢測報告、保存并評價檢測數(shù)據(jù)。
7 結(jié)束語
本文設(shè)計了一種雙螺桿壓縮機(jī)轉(zhuǎn)子型線檢測裝置,通過單探針直角坐標(biāo)機(jī)構(gòu)和多軸轉(zhuǎn)子平臺聯(lián)動的方式進(jìn)行檢測,有效解決了目前轉(zhuǎn)子型線檢測過程中,需要多探針固定測量而造成的機(jī)械結(jié)構(gòu)復(fù)雜、安裝調(diào)試繁瑣、檢測時間長和累積誤差大等問題;通過樹莓派控制板、語音識別模塊等智能輔助技術(shù),有效降低了檢測人員的勞動強(qiáng)度,提高檢測精度和效率;并可在轉(zhuǎn)子不同方位靈活調(diào)整檢測要素,除了轉(zhuǎn)子型線以外,也可用于轉(zhuǎn)子截面輪廓、螺旋升角等元素的檢測。同時,本裝置通過傳動和執(zhí)行機(jī)構(gòu)的調(diào)整,也適用于其他壓縮機(jī)核心零部件幾何要素的檢測,具有廣闊的市場價值和應(yīng)用前景。
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48
