
基于ARM Cortex-M3內核的嵌入式運動控制箱的設計與實現
2024-01-09 05:09:02嚴成武
機電工程技術 2023年12期
嚴成武,韓 宇
(深圳技師學院,廣東深圳 518116)
0 引言
隨著工業技術的發展,運動控制技術也在不斷發展,運動控制技術在制造業領域得到廣泛應用。運動控制就是對機械運動部件的位置、速度等進行實時控制管理,使其按照預期的運動軌跡和規定的運動參數進行運動[1]。常見的運動控制解決方案為工控機+運動控制卡的方式[2],該解決方案具有穩定性好、性能強勁、拓展性強等優點,但是該方案成本較高,結構不夠緊湊,在一些運動精度要求相對不高的運動控制場景,以及諸如作為初學者使用的教學實驗載體,較高的成本往往會制約所述運動控制方案的普及。因此,設計一種性價比更高,能滿足一些運動精度要求相對不高的運動控制場景的運動控制方案就很有必要。
為此,本文從技術和應用兩個維度出發,針對性地設計出一套具有更高性價比的運動控制方案。該方案以嵌入式微控制器為控制核心,通過控制器對PWM信號進行調制,以控制伺服電機(或步進電機)。改變PWM 信號頻率,可以調節伺服電機(或步進電機)的速度;改變PWM信號個數,可以控制伺服電機(或步進電機)的位置;此外,還可以通過控制器的數字輸入/輸出口,采集數字輸入信號或控制其他數字設備[3]。該嵌入式運動控制箱成本低、功能強大、體積小,適用于對性價比要求較高、對運動精度要求相對不高的場合。
1 系統組成
本文所述的運動控制箱以第二代ARM Cortex-M3 為內核的32 位微控制器LPC1752 為控制核心單元,內置24 V 開關電源、3.3 V 穩壓電路、光電隔離接口電路,所有電氣部件固定在鐵制外殼底座上,I/O接口通過上蓋的香蕉插座接線端子與外圍的伺服電機驅動器或步進電機細分驅動器連接,以實現控制功能[4]。系統組成如圖1所示,實物如圖2所示。
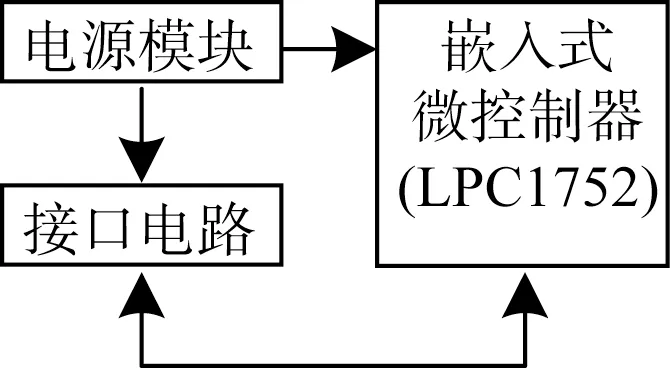
圖1 系統組成

圖2 實物
2 工作原理
基于第二代ARM Cortex-M3 內核32 位微控制器(LPC1752)的嵌入式運動控制箱通過嵌入式微控制器發送高低電平信號和PWM 信號,經過光電隔離接口電路,將3.3 V輸出電信號轉換為24 V輸出電信號,實現與伺服電機驅動器或步進細分驅動器的通信,以控制伺服電機或步進電機。通過高低電平信號的變化,可實現對伺服電機或步進電機轉向的控制;通過調制PWM信號的周期和數量,可實現對伺服電機或步進電機速度、位置的控制。最多可同時控制4 個伺服電機或步進電機。根據32 位微控制器(LPC1752)PWM 模塊的工作原理,可由以下公式計算PWM 定時器的計數頻率FPWM計數頻率,計算公式如下:
式中:Fpclk為系統時鐘頻率;PWM1PR 為預分頻寄存器,VPWM1PR為其值。
在32 位微控制器(LPC1752)中,使用匹配寄存器0(PWM1MR0)來控制PWM 的周期、頻率,PWM 輸出頻率fPWM輸出計算公式如下:
式中:PWM1MR0為匹配寄存器;VPWM1PR0為其值。
通過改變PWM1MR0 或PWM1PR 的值,就可以改變PWM 的輸出頻率,從而調節伺服電機或步進電機的速度。另外,通過控制PWM模塊輸出脈沖時間,從而控制PWM個數,就可以控制伺服電機或步進電機的位置[4]。
該嵌入式運動控制箱也可以通過嵌入式微控制器(LPC1752)數字輸出口,發送數字信號,經過光電隔離接口電路,將3.3 V 輸出電信號轉換為24 V 輸出電信號,實現對氣缸或其他電氣功能部件的控制,最多可同時控制16個氣缸或其他電氣功能部件。
該嵌入式運動控制箱還可以通過光電隔離接口電路,將24 V輸入電信號轉換為3.3 V輸入電信號,連接到嵌入式微控制器(LPC1752)數字輸入口,以實現對傳感器或其他數字信號的讀取,最多可同時讀取16個傳感器或其他數字信號。該嵌入式運動控制箱工作原理框圖如圖3所示。

圖3 工作原理框圖
3 硬件電路
該嵌入式運動控制箱硬件電路分為嵌入式微控制器(LPC1752)管腳圖、功能引腳圖、系統電源框圖、光電隔離接口電路圖,具體如下。
3.1 嵌入式微控制器(LPC1752)管腳圖
LPC1752采用LQFP80封裝,管腳分布如圖4所示。

圖4 管腳分布
3.2 功能引腳圖
P0.0~P0.31:P0 口是一個32 位I/O 口,每個位都有獨立的方向控制,P0 口引腳的操作取決于引腳連接模塊所選擇的功能。P0 口的引腳P0.4、P0.5、P0.12~P0.14、P0.19~P0.21、P0.23、P0.24、P0.27、P0.28、P0.31不可用。
P1.0~P1.31:P1 口是一個32 位I/O 口,每個位都有獨立的方向控制,P1 口引腳的操作取決于引腳連接模塊所選擇的功能。P1 口的引腳P1.2、P1.3、P1.5~P1.7、P1.11~P1.13、P1.16、P1.17、P1.21、P1.27不可用。
P2.0~P2.31:P2 口是一個32 位I/O 口,每個位都有獨立的方向控制,P2 口引腳的操作取決于引腳連接模塊所選擇的功能。P2口的引腳P2.11~P2.31不可用。
P4.0~P4.31:P4 口是一個32 位I/O 口,每個位都有獨立的方向控制,P4 口引腳的操作取決于引腳連接模塊所選擇的功能。P4 口的引腳P4.0~P4.27、P4.30、P4.31不可用。功能引腳圖如圖5所示。

圖5 功能引腳圖
3.3 系統電源框圖
220 V 交流電經過開關電源,轉換成24 V 直流電,再經過直流穩壓電路,將直流24 V轉成直流3.3 V。直流3.3 V為嵌入式微控制器的工作電源,直流24 V為接口電路工作電源。系統電源框圖如圖6所示。

圖6 系統電源框圖
3.4 光電隔離接口電路
光電隔離接口電路是基于ARM Cortex-M3 的嵌入式運動控制器實現與外圍負載通信的橋梁,包括輸入接口電路和輸出接口電路。接口電路采用TLP521-4型可控制光電耦合器,實現ARM Cortex-M3 控制器與外圍信號電平高低的轉換和光電隔離[5-8]。
TLP521-4 是一種性能優良的可控制光電耦合器元件,其功耗為150 mW,隔離電壓可達2 500 Vrms,廣泛運用在電腦終端機、測量儀器、影印機、家用電器等電器設備中。其主要作用為使控制線路前端與負載之間完全隔離,增強電路的安全性,減小電壓的干擾,同時簡化電路的設計[9-12]。
3.4.1 輸入接口電路
基于ARM Cortex-M3 的嵌入式運動控制器共有數字量輸入接口20 位,能夠實現多通道的數字量同時輸入。圖7 所示為輸入接口電路局部,以TLP521-4 型光電耦合器為核心元件,外圍輸入端電壓為DC24 V,當有外部信號輸入時,通過輸入接口電路轉換,將信號轉換為DC3.3 V弱電信號供ARM Cortex-M3處理器采集使用[13-14]。

圖7 輸入接口電路
3.4.2 輸出接口電路
基于ARM Cortex-M3 的嵌入式運動控制器共有數字量輸出接口16 位和PMW 輸出信號4 路。圖8 所示為輸出接口電路局部,以TLP521-4 型光電耦合器為核心元件。當系統對外有信號輸出時,通過輸出接口電路,DC3.3 V的弱電信號轉換為DC24 V強電信號,控制外圍注入電磁閥、指示燈等強電負載[15-16]。
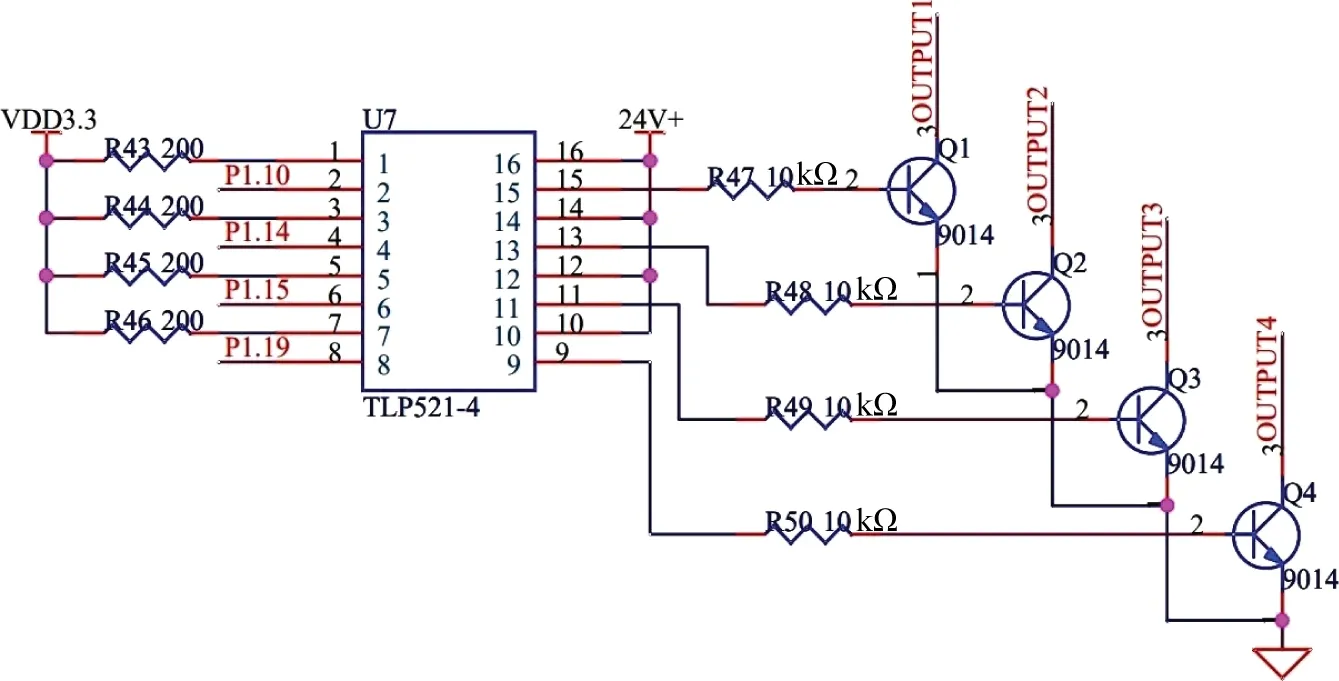
圖8 輸出接口電路
4 軟件設計
下面介紹以基于該嵌入式運動控制器為控制核心,以智能機械手實訓設備為控制對象的軟件設計[8]。軟件設計以C 語言為編程語言,按照模塊化編程的原則編寫程序,實現以下功能。
上電后,檢測料筒是否有工件;無工件則等待,有工件則上料氣缸動作,把工件推到皮帶線上,皮帶線動作;在皮帶線上,通過顏色傳感器判斷工件顏色,通過電容式接近開關判斷工件是否到位。如為白色工件,則工件到達皮帶擋板后,皮帶線停止,延伸氣缸伸出,Z軸氣缸下降,吸取工件,Z軸氣缸上升,延伸氣缸縮回;絲桿(伺服電機驅動)向右運行,根據倉庫工件傳感器的信號進行定位和Y軸氣缸動作,延伸氣缸伸出,Z軸氣缸下降,放下工件;Z軸氣缸上升,延伸氣缸縮回,Y軸氣缸復位;絲桿(伺服電機驅動)復位。如料筒有工件,則重復此過程。如為黑色工件,則皮帶擋板松開,工件通過皮帶擋板,到達皮帶線末端。如料筒有工件,則重復此過程。智能機械手實訓設備實物如圖9所示。

圖9 智能機械手實訓設備實物
該系統I/O 分配表如表1 所示,主程序流程如圖10所示。

表1 I/O分配表

圖10 系統主程序流程
5 測試結果
根據設計方案,制作出嵌入式運動控制箱并投入使用。測試結果如表2所示。
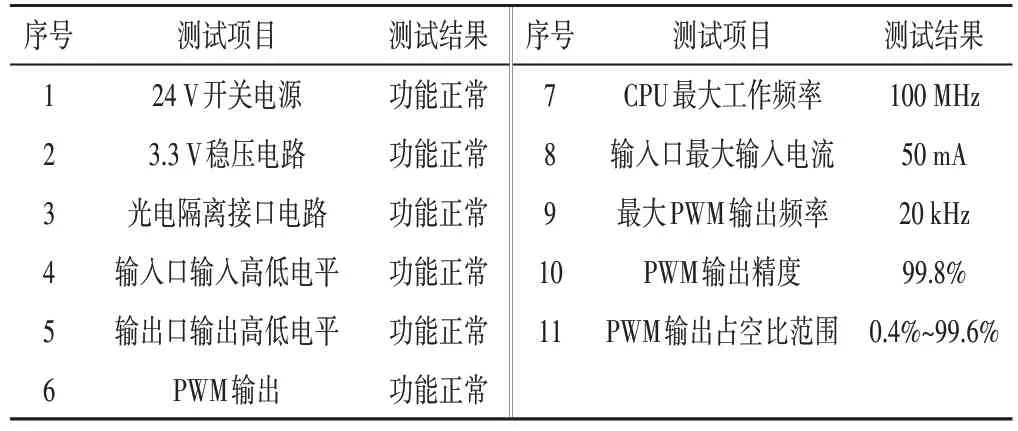
表2 測試結果
根據以上功能測試結果,可以確定預期的功能都可以實現。CPU 最大工作頻率達100 MHz,說明系統能夠以比較高的速度運行程序,保證了系統的時效性;輸入口最大輸入電流達50 MA,說明輸入口可以承受較大的輸入電流,能適應各種情況下的輸入載荷;最大PWM輸出頻率達20 kHz,說明可以給伺服電機驅運器(或步進電機驅動器)提供比較高的PWM信號,以驅動伺服電機(或步進電機)以高速運轉;PWM 輸出精度達99.8%,保證了整個運動控制系統的精度能達到一個較高的水平;PWM 輸出占空比范圍為0.4%~99.6%,說明可以適應各種伺服電機驅動器(或步進電機驅動器)對輸入PWM信號的占空比要求。以上測試結果證明了該嵌入式運動控制箱能達到預期的功能和性能,可廣泛應用于對性價比要求比較高、精度要求相對不太高的運動控制場景[17-20]。
6 結束語
本文設計并實現了一種嵌入式運動控制箱。該運動控制箱內嵌電源模塊,無需外加電源模塊,具有如下特點:使用光電耦合器對模擬信號和數字信號進行隔離,避免了模擬信號干擾數字信號;通過優化設計,該運動控制箱成本低、體積小,性價比高;以第二代ARM Cortex-M3為內核的32位微控制器LPC1752為控制核心,功能強大,可實現4通道PWM輸出、20通道的數字輸入和16通道的數字輸出。
通過實際驗證,基于第二代ARM Cortex-M3 內核32位微控制器(LPC1752)的嵌入式運動控制箱可以實現預期功能,性能良好,性價比高,已在職業培訓中投入使用,效果良好。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年7期)2019-04-25 13:17:14
中國生殖健康(2019年3期)2019-02-01 06:12:26
電子制作(2018年18期)2018-11-14 01:48:16
鐵道通信信號(2018年2期)2018-04-18 12:18:23
電鍍與環保(2016年3期)2017-01-20 08:15:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
單片機與嵌入式系統應用(2014年9期)2014-03-11 15:35:13
