機載RTK 定位精度對無人機測圖精度的影響分析
2024-01-09 07:50:54吳珍麗彭小青吳迪軍
地理空間信息 2023年12期
吳珍麗,彭小青,吳迪軍
(1.中鐵大橋勘測設(shè)計院集團有限公司,湖北 武漢 430050)
如何提高無人機大比例尺地形測圖的成果精度,一直是無人機航測學(xué)術(shù)界和工程界關(guān)注的重點之一[1]。影響無人機測圖精度主要有2個關(guān)鍵因素:一是準確相機參數(shù)的獲取;二是高精度POS數(shù)據(jù)的獲取[2-3]。
大疆精靈4 RTK無人機相機的鏡頭參數(shù)在出廠時已經(jīng)過檢校,由于搭載的是機械結(jié)構(gòu)不夠穩(wěn)定的非量測型相機,內(nèi)方位元素和畸變參數(shù)一旦發(fā)生改變就無法保證測量精度[4],因此需定期進行相機畸變參數(shù)的檢校并及時進行更新。而在POS數(shù)據(jù)獲取過程中,在大多數(shù)情況下,RTK均能達到較高的精度,但在個別情況下,由于地球的大氣層會對電磁波的傳播產(chǎn)生路徑以及時延上的影響[5-6],同時受到衛(wèi)星上的原子鐘、衛(wèi)星星歷等精準度的限制,電離層、對流層誤差、星歷、星鐘誤差等均會對RTK定位精度產(chǎn)生影響,其定位精度可能會出現(xiàn)較大波動,從而影響最終的測圖精度。本文在G3 銅陵長江公鐵大橋項目實施過程中發(fā)現(xiàn),由于部分測區(qū)的大疆精靈4機載RTK定位精度較低,進而導(dǎo)致生成的航測地形圖成果精度降低。因此本文結(jié)合該項目,進一步分析了機載RTK定位精度對無人機航測精度的影響,并提出了確保測圖精度的技術(shù)方案。
1 項目概況
G3銅陵長江公鐵大橋連接長江南岸的銅陵市區(qū)和長江北岸的樅陽縣,承擔(dān)既有銅陵長江公路大橋替代橋功能(替代高速公路),同時搭載鐵路過江,在銅陵長江公路大橋上游側(cè)約700 m,主橋橋跨為113.5 m+145 m+988 m+145 m+113.5 m,大橋按照“4線鐵路+6車道高速公路”的標準建設(shè)。鐵路橋面布置2線合廬銅城際、2線城市軌道交通1號線;公路橋面布置雙向6車道京臺高速,兩側(cè)設(shè)置緊急停車帶。本次測量任務(wù)為:在當?shù)販y繪部門已收集的1∶2 000地形圖基礎(chǔ)上,針對部分地形變化較大區(qū)域進行修補測,修補測區(qū)域為線路中線左右約100 m范圍內(nèi)共6個分散的測區(qū)。
2 無人機航測數(shù)據(jù)獲取與試驗方案
該項目的數(shù)據(jù)獲取利用大疆精靈4 RTK無人機及機載的2 000 萬分辨率數(shù)碼相機,按照1∶500 比例尺成圖要求及無人機飛行相關(guān)要求設(shè)計飛行實施。飛行航高設(shè)計為100 m,航向重疊度為80%,旁向重疊度為70%。航飛拍攝前,將收集到的控制點及航測范圍線導(dǎo)入衛(wèi)星影像圖中,通過衛(wèi)星影像圖確定作業(yè)范圍是否為禁飛區(qū)、限高區(qū),大致判斷無人機起降場地、飛行高度。通過踏勘實地核查周邊高層建筑物、高壓輸電線路、河流、高山等影響安全的因素,確定無人機起降場地。本項目外業(yè)航拍歷時3 d,共計飛行30架次,累計飛行時間495 min,拍攝時間344 min,拍攝相片7 411 張。每架次拍攝的像片均確保無人機RTK 解為固定解。項目實施過程中,采用千尋CORS作為機載RTK的差分源。
在航飛作業(yè)過程中,隨時觀察并記錄機載RTK的定位精度,即遙控器上顯示的RTK實時動態(tài)精度。經(jīng)過內(nèi)業(yè)處理生成三維實景模型后,根據(jù)測定的檢查點來評定模型上對應(yīng)成果的精度,以此分析機載RTK定位精度對測圖精度的影響。所有測區(qū)均勻布設(shè)一定數(shù)量的檢查點,檢查點選取航測任務(wù)范圍內(nèi)的明顯地物點,一般選取比較清晰的公路地面標識線角點,方便后期內(nèi)業(yè)比對統(tǒng)計。使用Trimble R10 GNSS 接收機以RTK定位模式實測檢查點的坐標、高程,測量方式為雙測回平滑采集,每個測回采集30個歷元的數(shù)據(jù),最終以2個測回共60個歷元數(shù)據(jù)的均值作為檢查點的成果。
3 機載RTK定位精度對測圖精度的影響分析
計算檢查點在三維實景模型上的坐標值與RTK實測坐標值的差值,統(tǒng)計測區(qū)1~6共40個檢查點的精度如表1 所示。表中,△X 表示檢查點在平面坐標(X)方向的坐標差值;△Y表示檢查點在平面坐標(Y)方向的坐標差值;△H 表示檢查點在高程(H)方向的差值。
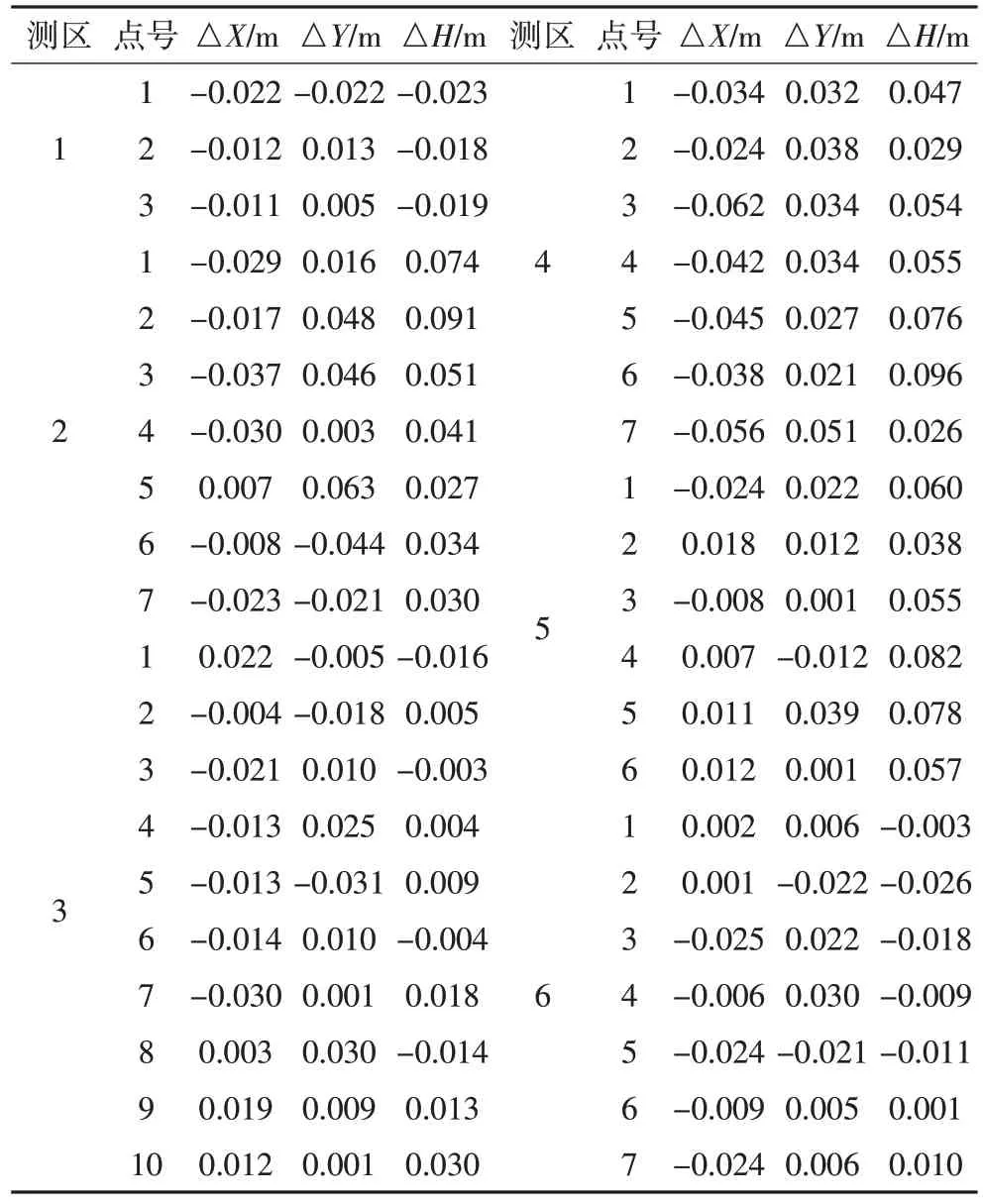
表1 檢查點精度統(tǒng)計表
從表1 可以看出,測區(qū)1、測區(qū)3、測區(qū)6 的檢查點精度較高,而測區(qū)2、測區(qū)4、測區(qū)5 的檢查點精度整體較低。在項目航測中發(fā)現(xiàn),測區(qū)1、測區(qū)3、測區(qū)6 航飛作業(yè)時機載RTK定位精度為2~3 cm,而測區(qū)2、測區(qū)4、測區(qū)5航飛作業(yè)時機載RTK定位精度為5~9 cm,反映出航測地圖的精度與機載RTK精度的正相關(guān)性。
為了進一步分析測區(qū)2、測區(qū)4、測區(qū)5 精度較差的原因是否與機載RTK 的定位精度較差有關(guān),以測區(qū)4 為實驗測區(qū),使用Trimble R10 GNSS 接收機自建單基站的方式執(zhí)行航飛并實測檢查點的坐標、高程。該測區(qū)外業(yè)航飛作業(yè)時機載RTK 顯示的實時定位精度均為2~3 cm。統(tǒng)計的7 個檢查點的精度如表2所示。
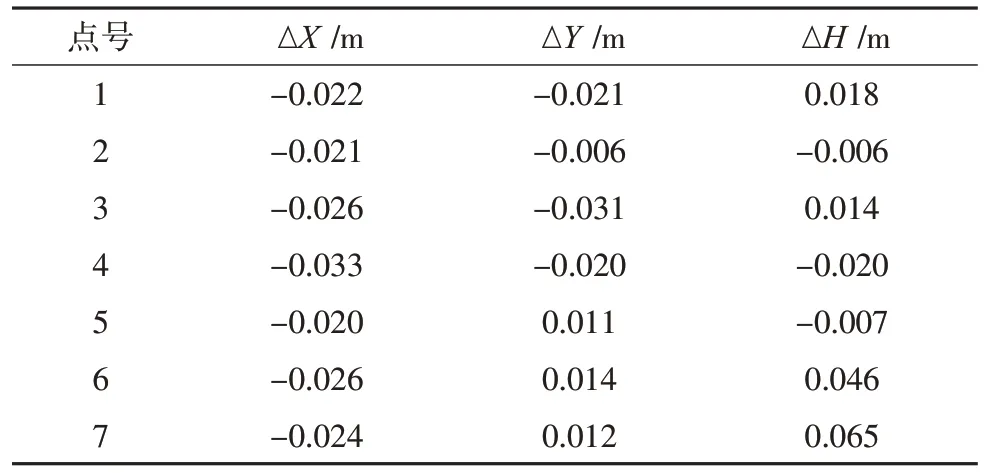
表2 測區(qū)4試驗精度統(tǒng)計表(自建單基站RTK)
從表2 可以看出,在參與精度統(tǒng)計的7 個檢查點中:X坐標偏差絕對值最大為0.033 m,最小為0.020 m,平均值為0.025 m;Y坐標偏差絕對值最大為0.031 m,最小為0.006 m,平均值為0.016 m;X坐標中誤差為0.025 m,Y坐標中誤差為0.018 m,平面點位中誤差為0.031 m。高程偏差絕對值最大為0.065 m,最小為0.006 m,平均值為0.025 m,高程中誤差為0.032 m。顯然,表2中測區(qū)4的檢查點精度結(jié)果優(yōu)于表1中測區(qū)4 的精度,說明機載RTK 定位精度會對航測地形圖成果的精度產(chǎn)生顯著影響。
當千尋CORS 系統(tǒng)較穩(wěn)定,機載RTK 的定位精度為2~3 cm 時,再次以千尋CORS 為差分源對測區(qū)4 執(zhí)行航飛作業(yè),此時機載RTK的定位精度與上述自建單基站的方式進行航飛作業(yè)時精度相當。統(tǒng)計的7 個檢查點的精度。在參與精度統(tǒng)計的7個檢查點中:X坐標偏差絕對值最大為0.037 m,最小為0.001 m,平均值為0.020 m;Y坐標偏差絕對值最大為0.035 m,最小為0.003 m,平均值為0.019 m ;X坐標中誤差為0.023 m,Y坐標中誤差為0.022 m,平面點位中誤差為0.031 m。高程偏差絕對值最大為0.054 m,最小為0.006 m,平均值為0.023 m;高程中誤差值為0.028 m。以上精度結(jié)果與表2的相當,均優(yōu)于表1中測區(qū)4的檢查點精度。結(jié)果表明:機載RTK定位精度對生成的航測成果精度具有顯著影響。
綜上所述,當航飛作業(yè)過程中機載RTK的定位精度為5~9 cm時,獲取的航測成果的精度較低;當機載RTK的定位精度為2~3 cm時,獲取的航測成果的精度較高,航測成果的精度與機載RTK的定位精度表現(xiàn)出較強的正相關(guān)性。
4 機載RTK定位精度差異分析
無論是連接千尋CORS 方式作業(yè),亦或通過自建單基站的方式作業(yè),其本質(zhì)均為通過建立載波相位差分方程求解整周模糊度,進而解算機載RTK 實時位置。根據(jù)載波相位雙差方程聯(lián)立求解,雙差綜合誤差可簡化為:
式中, ?2Ο 為軌道偏差殘余; ?2Ι 為電離層延遲殘余;?2Τ 為對流層延遲殘余;μ與站間距離有關(guān),當距離較短時,這3 項可以忽略不計,但在中長距離動態(tài)定位中,這3項誤差占據(jù)了主導(dǎo)地位,使得定位精度迅速下降[7]。本文實驗中的CORS為采用VRS技術(shù)的大型網(wǎng)絡(luò)參考站系統(tǒng),基準站間距一般長達40~80 km,容易受電離層、對流層殘差的影響,比較常見的表現(xiàn)是:在不同緯度地區(qū)、同一天不同時間段、西部山區(qū)不同海拔高度使用時均存在差異。在電離層活躍的時段及地區(qū),RTK定位精度將顯著降低。而自建單基站系統(tǒng)是一種簡便快捷的作業(yè)方式,可為大疆精靈4RTK 提供差分源。考慮到自建單基站系統(tǒng)作業(yè)距離一般不超過2 km,幾乎可以忽略電離層、對流層延遲殘差的影響,精度相對更穩(wěn)定、可靠。因此,在執(zhí)行航測飛行任務(wù)時,當機載RTK精度較差時可選擇自建單基站方式進行作業(yè)。實際航飛作業(yè)過程中,應(yīng)隨時監(jiān)控機載RTK 的定位精度。當RTK 定位精度較低時,應(yīng)選擇合適的定位模式和有利的作業(yè)時間進行航測外業(yè),以提高RTK定位精度和測圖精度。
5 結(jié) 論
本文基于大疆精靈4 RTK無人機,結(jié)合實際航測項目詳細分析了機載RTK 定位精度對測圖精度的影響。結(jié)果表明機載RTK定位精度對測圖精度的影響顯著,因此在執(zhí)行航測飛行任務(wù)時應(yīng)觀察并記錄機載RTK 定位精度。當機載CORS RTK 精度較差時,可通過自建單基站方式進行作業(yè),單基站的作業(yè)距離控制在2 km以內(nèi),以降低電離層、對流層影響對定位結(jié)果的不利影響,進而確保地形圖的精度;當無自建單基站條件或自建單基站方式作業(yè)精度仍然較差時(RTK定位精度不宜低于3 cm),應(yīng)選擇RTK 定位精度較好的時段進行作業(yè),以保證航測成果的精度。本文的研究成果可為無人機免像控作業(yè)規(guī)范規(guī)程的制定提供參考。
猜你喜歡
中學(xué)生數(shù)理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
新作文·小學(xué)低年級版(2021年9期)2021-11-27 07:57:46
當代陜西(2021年2期)2021-03-29 07:41:24
學(xué)生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
媽媽寶寶(2017年3期)2017-02-21 01:22:28
故事大王(2016年7期)2016-09-22 17:30:08
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(shù)(2016年3期)2016-03-26 07:13:38
兒童故事畫報(2013年3期)2013-06-24 05:40:30