基于信息預處理的無人機集群協同電子偵察
2024-01-10 10:10:00楊富程宋偉健李立欣宋樹成
海軍航空大學學報 2023年6期
楊富程,宋偉健,但 波,李立欣,宋樹成
(1.海軍航空大學,山東煙臺 264001;2.西北工業大學電子信息學院,陜西西安 710072)
0 引言
近年來,無人機因其高移動性以及靈活的部署能力被廣泛應用于商業、農業以及工業中[1-4]。無人機通過搭載電子偵察設備可被用作空中移動電子偵察網絡,有效增強了電子偵察網絡的性能以及覆蓋范圍[5-6]。在突發性的電子偵察網絡介入場景中,傳統的電子偵察車和電子偵察飛機使用不靈活、作用受限制,往往難以捕捉轉瞬即逝的電子偵察信號。同時,電子偵察車只能在地面工作,其偵察路徑受到路況的嚴重制約;大型電子偵察飛行的起飛受到嚴格限制,巡航高度通常6 000 m 以上,反射截面積大,易被發現。基于電子偵察需求的突發性和未來電子偵察需求的緊迫性,部署搭載電子偵察載荷的無人機網絡成為有效解決電子偵察問題的高效方案并引起了廣泛關注[4,7]。
無人機集群協同電子偵察可以綜合考慮多個無人機平臺的電子偵察結果,有效降低復雜電磁環境、干擾、衰落等對電子偵察結果的影響,增強檢測結果的可靠性[8]。多平臺電子偵察數據融合是無人機集群協同電子偵察的核心,但是傳統單一的數據融合方法對復雜電磁環境考慮較少,使得聯合電子偵察判決結果具有不確定性[9-10]。針對信息的不確定性,貝葉斯推理的方法依托先驗概率,因而其局限性較大;模糊集理論通過將具有不確定性的目標對象通過隸屬關系搭建函數,后續進行數據融合和分析,但是該方法不適用于非一致包含的交集情況且會降低判決精度。新興的神經網絡算法和遺傳算法可以通過大量訓練來對不確定信息進行預測和判決,但是算法復雜度高,計算成本也較高。基于證據理論(Dempster-Shafer,DS)的信息融合,不需要先驗的數據信息,就可以快速有效處理隨機性和模糊性所帶來的不確定性信息的融合問題,并且可以根據證據值的不斷積累,增加結果的準確度[11]。文獻[12]對不同感知節點的電磁環境進行了比較,并將其作為證據來源的權重,可以有效減小不確定信息對信息融合帶來的影響,提高檢測性能。相較于單閾值,文獻[13]將雙閾值應用于DS數據融合算法,有效提升了局部信息的準確性。當觀測環境信噪比低、存在虛警信號或通信信道衰落嚴重時,會導致證據沖突的情況,造成信息融合結果錯誤。基于原始數據進行算法優化可以在一定程度上彌補證據沖突帶來的判決誤差,但是對于大量高沖突證據情況,該方法局限性較強[14]。通過對數據進行預處理和加工后,再進行數據融合,該方法可以有效避免部分數據沖突,但是面臨著數據收斂性差的風險[15-18]。
本文針對無人機集群協同電子偵察過程中存在的證據沖突現象,結合上述數據融合存在的問題,提出了1種基于單平臺無人機電子偵察結果預處理的方法。通過數據篩選僅對可能存在沖突的數據進行修正,從而降低對正常數據破壞的可能性。仿真結果表明,該方法可以在較低的計算復雜度的前提下有效提升無人機集群協同電子偵察的效果,可靠性高,魯棒性強。
1 系統模型
無人機集群協同電子偵察系統模型如圖1所示。

圖1 無人機集群協同電子偵察結構示意圖Fig.1 Schematic diagram of UAV cluster collaborative electronic reconnaissance structure
在無人機協同電子偵察網絡中,假設L架無人機平臺搭載電子偵察設備進行感知,在第t時刻各個平臺的觀測模型為:
式(1)中:xl(k)為第l個無人機平臺收到的電子偵察信號;sl(k)為被偵察輻射源的信號;hl和nl(k)為對應第l個無人機平臺的信道增益和背景噪聲。
通過能量檢測的方法對輻射源進行判別,得到第l個無人機平臺的能量檢測信號為:
式(2)中:N=2TW為采樣個數,T為檢測時間,W為信號帶寬的乘積。當采樣個數足夠大時,能量檢測信號xEi可以近似表示為高斯分布,即:
式(3)中:均值分別為μ0i=N和μ1i=N(1+γi);方差分別為σ0i=2N和σ1i=2N(1+2γi);γi為信噪比。
無人機平臺將電子偵察結果傳遞給無人機集群數據融合中心,在數據中心的數據統計可以表示為:
判決中心處的全局判決變量可以表示為D,
1.1 基于傳統DS證據理論的無人機集群協同電子偵察
在無人機集群協同電子偵察網絡中,DS 證據理論的識別框架可以定義為Θ={}H0,H1,Ω,其中Ω代表信息的不確定性或沖突性[16]。對于單無人機平臺的電子偵察信息,利用高斯函數構建其基本概率分配(basic probability assignment,BPA)函數為:
利用傳統的DS合成公式融合無人機集群的電子偵察信息BPA值:
式(9)(10)中:Al?Θ,l=1,2,…,L。
概括來說,該方法可以分為本地電子信息預處理和無人機數據中心的信息融合。
1.2 無人機電子偵察信息預處理
第l架無人機電子偵察信息的靜態權重可以通過對比無人機集群中電子偵察信號的信噪比進行設置:
相應修正后的第l架無人機電子偵察信息BPA值為:
在此基礎上,進一步計算不同無人機電子偵察信息之間的相互支持度,從而更加精準地獲得信息權值:
式(15)中:l=1,2,…,L;k=1,2,…,L;A∩B≠?。
相應地,所有無人機平臺電子偵察信息與第l架無人機電子偵察信息支持度總和可以表示為:
第l架無人機電子偵察信息的絕對可信度可以表示為:
經過歸一化的第l架無人機電子偵察信息的相對可信度可以表示為:
無人機集群中共有L架無人機進行協同電子偵察,將L架無人機平等對待,則每架無人機相應的權重為1L。如果第l架無人機電子偵察信息crd_rell≥1L,視為正常數據;否則,視為沖突信息。
新的信息加權方法在確認沖突數據后,僅對沖突信息進行修正,這樣可以保持對沖突數據的有效修改和對非沖突數據的有效保護。基于信息的靜態加權系數和相對可信度,修正系數可以表示為:
式(19)中:λ是比重值,可以用來調節2 種加權系數,從而改變2種權重度修正系數的比例影響。
修正后的加權系數可以有效降低沖突數據對證據合成結果的影響。
1.3 無人機集群判決中心數據融合
將所有無人機平臺的電子偵察結果進行預處理后,加強了本地電子偵察信息的可靠性,為下一步的數據融合和聯合判決提供了更加可靠的信息依據。為避免在信息融合過程中出現因信息悖論而造成的歸一化失敗的情況,最終協同電子偵察判決變量可以表示為:
最終比較msum(H1) 和msum(H0)的大小和最終判決門限η進行最終判決,即:
以上為無人機集群協同電子偵察證據預處理方法信息融合的具體步驟,該方法的具體思想是先判斷出所有點偵察數據中的沖突數據,并對沖突數據修正,再利用基于證據預處理的合成公式來對修正后的感知數據進行信息融合。
該方法可以在證據悖論問題存在時,提高檢測性能,增加魯棒性,提高協同電子偵察聯合判決的準確度,并且可以針對沖突數據進行校正,避免了修改原始正常數據帶來的未知風險。
2 仿真分析
本節采用蒙特卡洛方法和MATLAB 軟件對無人機集群協同電子偵察的過程進行仿真驗證。將電子偵察信息預處理的信息融合算法應用于無人機集群協同電子偵察。本算法不依賴任何先驗信息的支持,所以,除無人機自身電子偵察結果外,無需其他信息輸入。為了驗證和比較所提算法的可行性,依據傳統無人機組網的方式進行了建模,電子偵察載荷進行自主判決并將結果集中至信息融合中心進行聯合判決。
圖2 中,在50 km×50 km×10 km 的空間中隨機分布100 個輻射源,無人機集群搭載電子偵察載荷對該區域進行電子偵察。無人機搭載電子偵察載荷的有效感知距離為0.5 km。每個無人機平臺將自身的電子偵察結果發送給指揮中心,假設分別采用了5架、8架、10 架無人機搭載電子偵察載荷對輻射源進行監測和感知,電子偵察的信噪比由0 dB升至20 dB,聯合判決的結果分別由傳統的證據理論和基于信息預處理的信息融合方法獲得。通過仿真結果我們可以看到,隨著電子偵察信噪比的提高,相應的無人機集群信息融合可靠性也顯著提升。增加無人機平臺的數量可以有效克服單平臺電子偵察可靠性低的缺點,提升協同電子偵察效率。但是,隨著無人機數量的增加,無人機集群系統的成本和復雜度也呈指數增加。
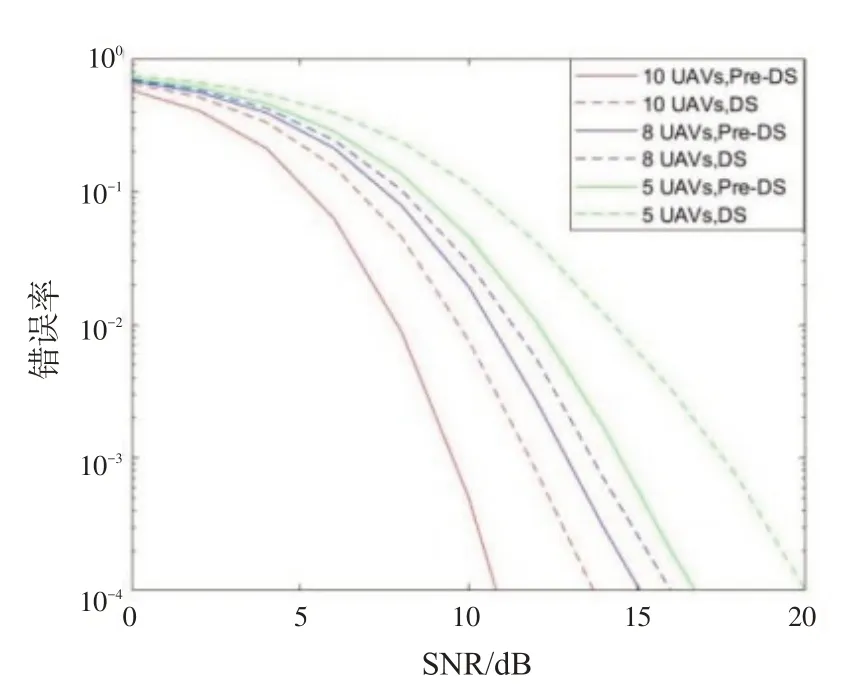
圖2 不同信噪比下無人機集群協同電子偵察錯誤率Fig.2 Error rate of UAV cluster collaborative electronic reconnaissance under different signal-to-noise ratios
圖3 中,各無人機通過搭載電子偵察載荷對偵察區域內的電磁環境進行感知判決。仿真過程中,假設共有6 架無人機平臺對輻射源進行判決,每架無人機搭載的電子偵察載荷性能一致且單平臺的判決概率相等。無人機通過空中通信網絡將判決結果傳送至聯合判決中心進行判決,信噪比由3 dB升至15 dB,相應的聯合判決準確性明顯提升。通過仿真結果可以看出,電子偵察載荷的性能和通信信道的質量對無人機集群協同電子偵察的聯合判決性能均有明顯影響。
圖4 中,無人機集群協同電子偵察的效果在高信噪比的偵察環境下有明顯提升,同時通過設置合理的信息預處理權值βl可以得到相對最佳的協同電子偵察可靠性。仿真過程中,假設共有5 架無人機搭載電子偵察載荷對輻射源目標進行協同電子偵察,值得注意的是,在仿真過程中,假設每個電子偵察載荷性能相同且電子偵察環境的信噪比也相同。仿真結果顯示:在電子偵察環境信噪比為10 dB的情況下,修正系數βl值為1.4時,對應最佳聯合電子偵察結果;相對應地,當電子偵察環境信噪比為5 dB時,修正系數βl值為0.6時,無人機集群協同電子偵察效果最佳。

圖4 不同修正系數下無人機集群協同電子偵察判決概率Fig.4 Probability of UAV cluster collaborative electronic reconnaissance decision under different correction coefficients
3 結論
本文將信息預處理技術應用于無人機集群協同電子偵察任務中。基于信息預處理技術的協同電子偵察算法不依靠任何先驗信息,在不增加系統復雜度和成本的條件下可以實現協同電子偵察效果的有效提升。該算法能夠更好地根據實際情況調整修正系數的數值,使該模型下的無人機集群協同電子偵察效果達到最佳。對傳統的DS算法和基于信息預處理的協同電子偵察算法進行了仿真實驗比較,分析了在不同噪聲環境、不同數量電子偵察平臺等條件下,對系統性能產生的影響:聯合判決性能受到電子偵察噪聲影響明顯,增加無人機平臺和電子偵察載荷數量可以有效提升協同電子偵察效率。通過仿真,驗證了在相同單平臺電子偵察判決率的情況下,基于信息預處理的無人機集群協同電子偵察算法可以獲得更高的聯合判決可靠性。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
