雙穩(wěn)態(tài)壓電-電磁復(fù)合俘能器非線性動(dòng)力學(xué)分析
2024-01-16 10:23:00倪祥祿陳定方李立杰
武漢科技大學(xué)學(xué)報(bào) 2024年1期
關(guān)鍵詞:系統(tǒng)
梅 杰,倪祥祿,宋 鋼,陳定方,李立杰
(1.武漢理工大學(xué)智能制造與控制研究所,湖北 武漢,430063; 2.武漢理工大學(xué)交通與物流工程學(xué)院,湖北 武漢,430063; 3.英國斯旺西大學(xué)工程學(xué)院,英國 斯旺西,SA1 8EN)
振動(dòng)俘能器是將來自環(huán)境的振動(dòng)能量轉(zhuǎn)換為電能的裝置,根據(jù)能量轉(zhuǎn)換機(jī)理的不同,其主要分為四類,即基于壓電效應(yīng)的壓電式俘能器、基于電磁感應(yīng)的電磁式俘能器、基于電容原理的靜電式俘能器以及摩擦式俘能器。單一能量轉(zhuǎn)換方式的效率較低,將兩種或兩種以上的能量轉(zhuǎn)換方式集中使用則可以提高俘能效果,故復(fù)合俘能器已逐步成為微能源研究的主要方向。另外,傳統(tǒng)的線性能量采集器具有較高的諧振頻率,當(dāng)環(huán)境頻率偏離諧振頻率時(shí),系統(tǒng)的發(fā)電性能將急劇下降,因此線性能量采集器的環(huán)境適應(yīng)性較差[1]。非線性系統(tǒng)復(fù)雜的動(dòng)力學(xué)行為[2-4]為拓寬振動(dòng)俘能器的工作頻帶、提高俘能效率提供了新思路,越來越多的學(xué)者引入具有非線性剛度特征的結(jié)構(gòu)以構(gòu)成具有非線性單穩(wěn)態(tài)和雙穩(wěn)態(tài)特性的振動(dòng)俘能器[5-8]。2009年,Challa等[9]首次設(shè)計(jì)了一種懸臂梁式的壓電-電磁復(fù)合振動(dòng)俘能器,通過實(shí)驗(yàn)測得其總輸出功率為340 μW,該裝置是一種簡單的復(fù)合俘能器,為后續(xù)研究奠定了基礎(chǔ)。Kim等[10]研發(fā)了一種新型的雙穩(wěn)態(tài)復(fù)合振動(dòng)俘能器,該裝置由懸臂梁和一對(duì)相互排斥的磁體組成,一個(gè)磁體連接在自由端,另一個(gè)連接到與懸臂梁軸向?qū)R的線性彈簧形成彈簧加載的磁體振蕩器。這種結(jié)構(gòu)降低了雙阱勢壘,實(shí)現(xiàn)了懸臂梁在低激勵(lì)振幅和頻率下的阱間振蕩。Yao等[11]研究了一種新型雙穩(wěn)態(tài)壓電-電磁俘能器的發(fā)電和非線性動(dòng)力學(xué)行為,設(shè)計(jì)了三種不同類型的壓電懸臂梁結(jié)構(gòu),包括單穩(wěn)態(tài)壓電懸臂梁、雙穩(wěn)態(tài)彈簧-磁體壓電懸臂梁以及雙穩(wěn)態(tài)彈簧-磁體-線圈壓電懸臂梁,并對(duì)每種結(jié)構(gòu)的發(fā)電效率和動(dòng)態(tài)特性進(jìn)行了實(shí)驗(yàn)研究,結(jié)果表明雙穩(wěn)態(tài)壓電-電磁俘能器具有最佳性能。
本文以能夠承受長期振動(dòng)疲勞的聚偏氟乙烯(PVDF)為壓電材料,提出一種雙穩(wěn)態(tài)懸臂梁式壓電-電磁復(fù)合俘能器結(jié)構(gòu)。考慮梁的幾何非線性應(yīng)變,并引入磁力勢能建立復(fù)合俘能器模型,繼而研究激勵(lì)頻率、磁鐵間距和負(fù)載電阻等參數(shù)對(duì)系統(tǒng)輸出的影響,然后進(jìn)行俘能器的非線性動(dòng)力學(xué)分析和整流濾波分析。
1 壓電-電磁復(fù)合俘能器建模及穩(wěn)定性分析
1.1 復(fù)合俘能器幾何模型
本文研究的壓電-電磁復(fù)合俘能器裝置如圖1所示,能量轉(zhuǎn)換包括壓電部分和電磁部分。懸臂梁由一層鋼基底材料和一層 PVDF 壓電材料組成,在懸臂梁末端固定有動(dòng)磁鐵A,動(dòng)磁鐵右邊相隔一定距離處有一個(gè)靜磁鐵B,在動(dòng)磁鐵下方放置有感應(yīng)線圈。壓電層通過可忽略厚度的平面電極與負(fù)載電阻R1相連接;感應(yīng)線圈兩端連接有負(fù)載電阻R2。在基礎(chǔ)激勵(lì)的作用下,懸臂梁發(fā)生振動(dòng),運(yùn)動(dòng)形式隨著激勵(lì)頻率和幅值的不同而變化。
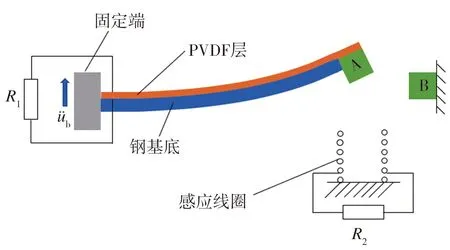
圖1 壓電-電磁復(fù)合俘能器示意圖
由于所設(shè)計(jì)的懸臂梁長寬比較大,故主要考慮梁橫向振動(dòng)引起的變形。應(yīng)力方向垂直于電場方向,所以該結(jié)構(gòu)滿足第二類壓電本構(gòu)方程,壓電本構(gòu)關(guān)系為
(1)

壓電層內(nèi),電場強(qiáng)度為
(2)
式中:V(t)為壓電層的總輸出電壓,其中t代表時(shí)間;hp為PVDF厚度。
根據(jù)Euler-Bernoulli梁理論,大變形時(shí)應(yīng)變和位移之間的關(guān)系可以表示為
S1=
(3)
式中:w(x,t)為懸臂梁縱向坐標(biāo)x處相對(duì)于基座的橫向位移,z為懸臂梁橫截面上某處到中性層的距離。
懸臂梁截面幾何尺寸如圖2所示。基底和PVDF壓電層的厚度分別為hs和hp,兩層寬度均為b,h3為PVDF層頂部距中性層的距離,h2為PVDF層底部距中性層的距離;h1為鋼基底的底部距中性層的距離。
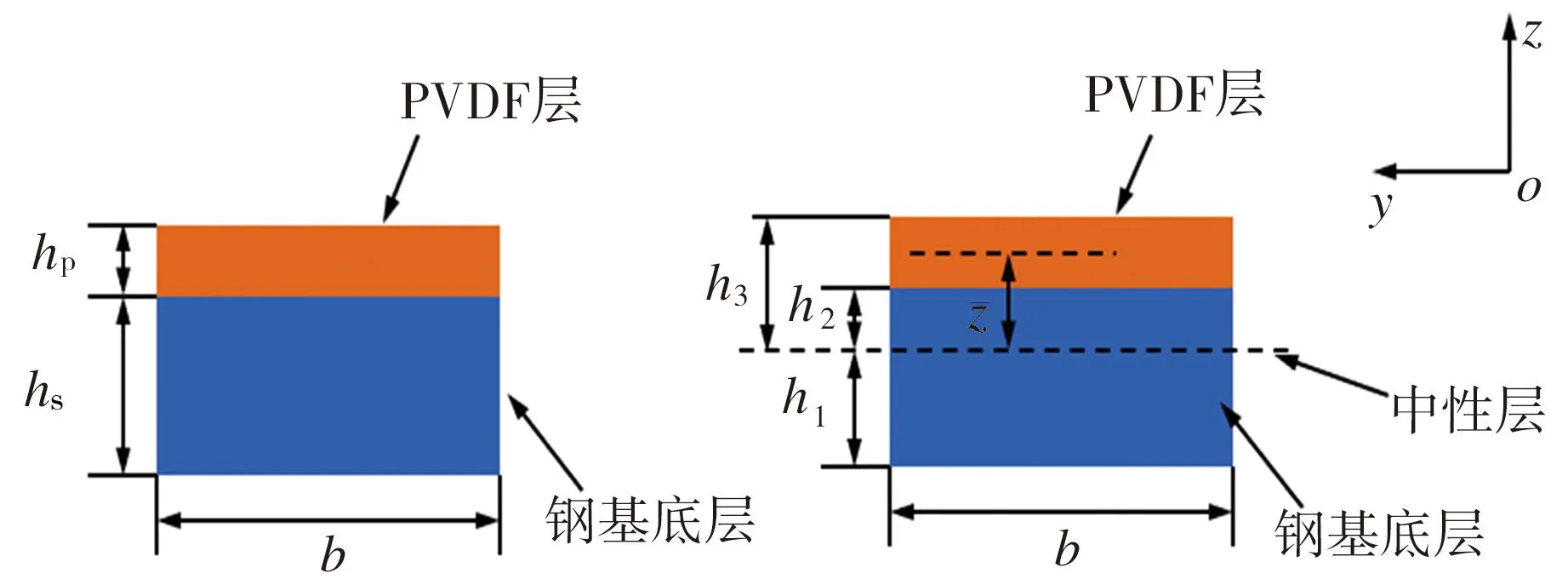
圖2 懸臂梁截面幾何尺寸
中性層位置參考文獻(xiàn)[12]中的方法確定,有下式成立:
(4)
式中:Ys為鋼基底的楊氏模量。由式(4)可解得中性層距離PVDF層和鋼基底層的距離:
(5)
懸臂梁復(fù)合彎曲剛度YI可表示為
(6)
式中:Is、Ip分別為鋼基底層和PVDF層相對(duì)于中性層的慣性矩。
1.2 復(fù)合俘能器非線性動(dòng)力學(xué)建模
將復(fù)合俘能器的末端磁鐵看作質(zhì)點(diǎn),不考慮其轉(zhuǎn)動(dòng)慣量。壓電-電磁復(fù)合俘能器的機(jī)電耦合模型如圖3所示,其中,w為壓電振子相對(duì)于基座的位移,ub為位移激勵(lì)。
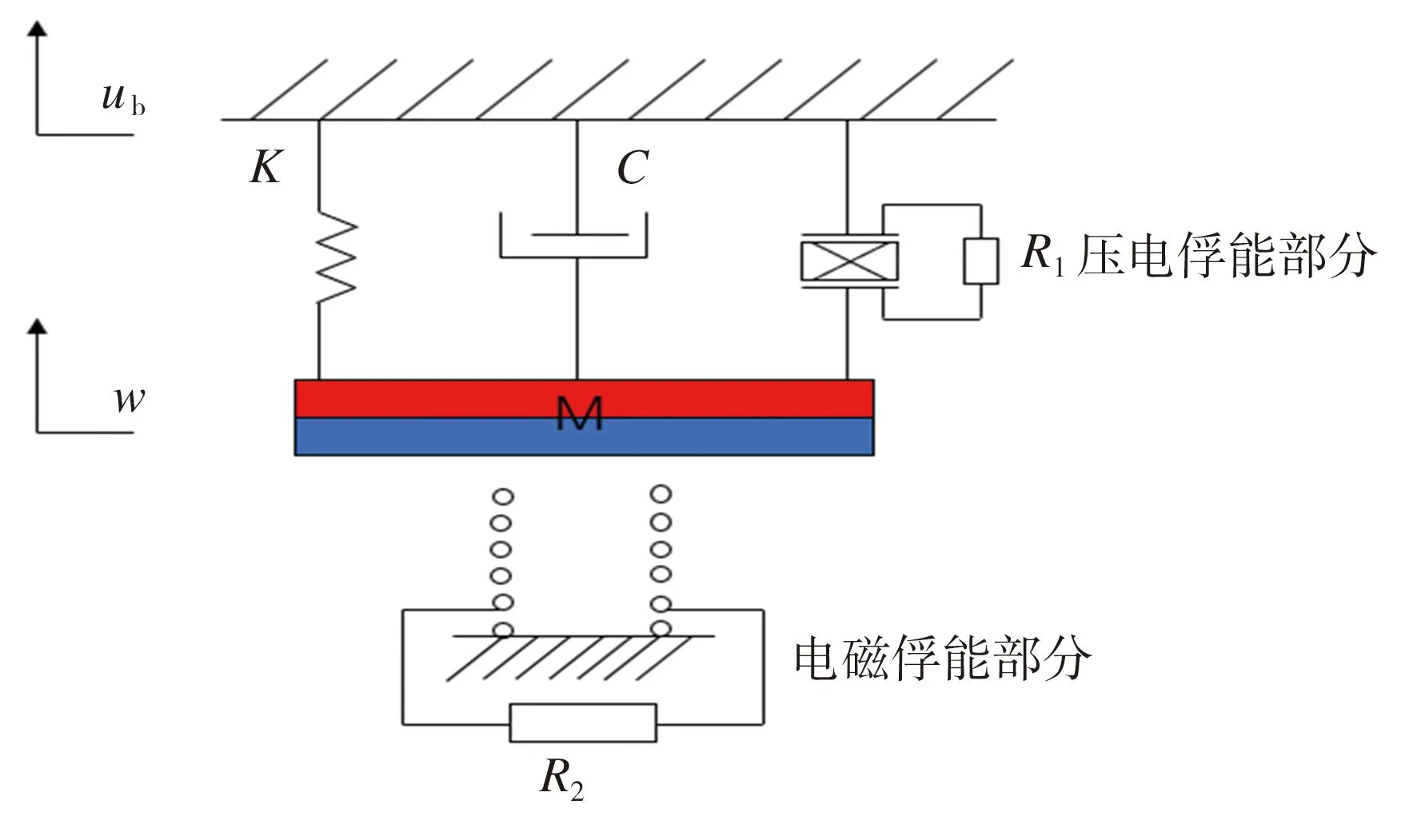
圖3 壓電-電磁復(fù)合俘能器的機(jī)電耦合模型
根據(jù)Hamilton原理,建立在外界激勵(lì)下系統(tǒng)的多物理場耦合壓電-電磁復(fù)合俘能器分布式參數(shù)模型:

(7)
式中:δ代表變分符號(hào),T為系統(tǒng)動(dòng)能,U為系統(tǒng)彈性勢能,We為系統(tǒng)電勢能,Wm為電磁能,Um為磁力勢能,δWnc為虛功的變分。
系統(tǒng)的動(dòng)能包括懸臂梁和末端磁鐵的平動(dòng)動(dòng)能,可表示為
(8)
式中:(·)代表函數(shù)對(duì)時(shí)間的導(dǎo)數(shù);L為懸臂梁長度;m為單位長度懸臂梁的質(zhì)量,m=ρsAs+ρpAp,其中ρs、ρp分別為鋼基底和PVDF壓電材料的密度,As、Ap分別為鋼基底層和PVDF層的橫截面積;Mt為末端磁鐵質(zhì)量。
系統(tǒng)的彈性勢能包括壓電懸臂梁內(nèi)部與應(yīng)變相關(guān)的勢能,可表示為
(9)
式中:T1為懸臂梁的應(yīng)變,S1為懸臂梁的應(yīng)力,Vs為鋼基底層體積,Vp為PVDF層體積。

(10)
壓電-電磁復(fù)合俘能器的電磁機(jī)電耦合系數(shù)θe是一個(gè)關(guān)鍵參數(shù)。電磁感應(yīng)原理如圖4所示,其中標(biāo)明了線圈與動(dòng)磁鐵的幾何位置關(guān)系,根據(jù)文獻(xiàn)[13]可得到電磁機(jī)電耦合系數(shù)θe:
(11)
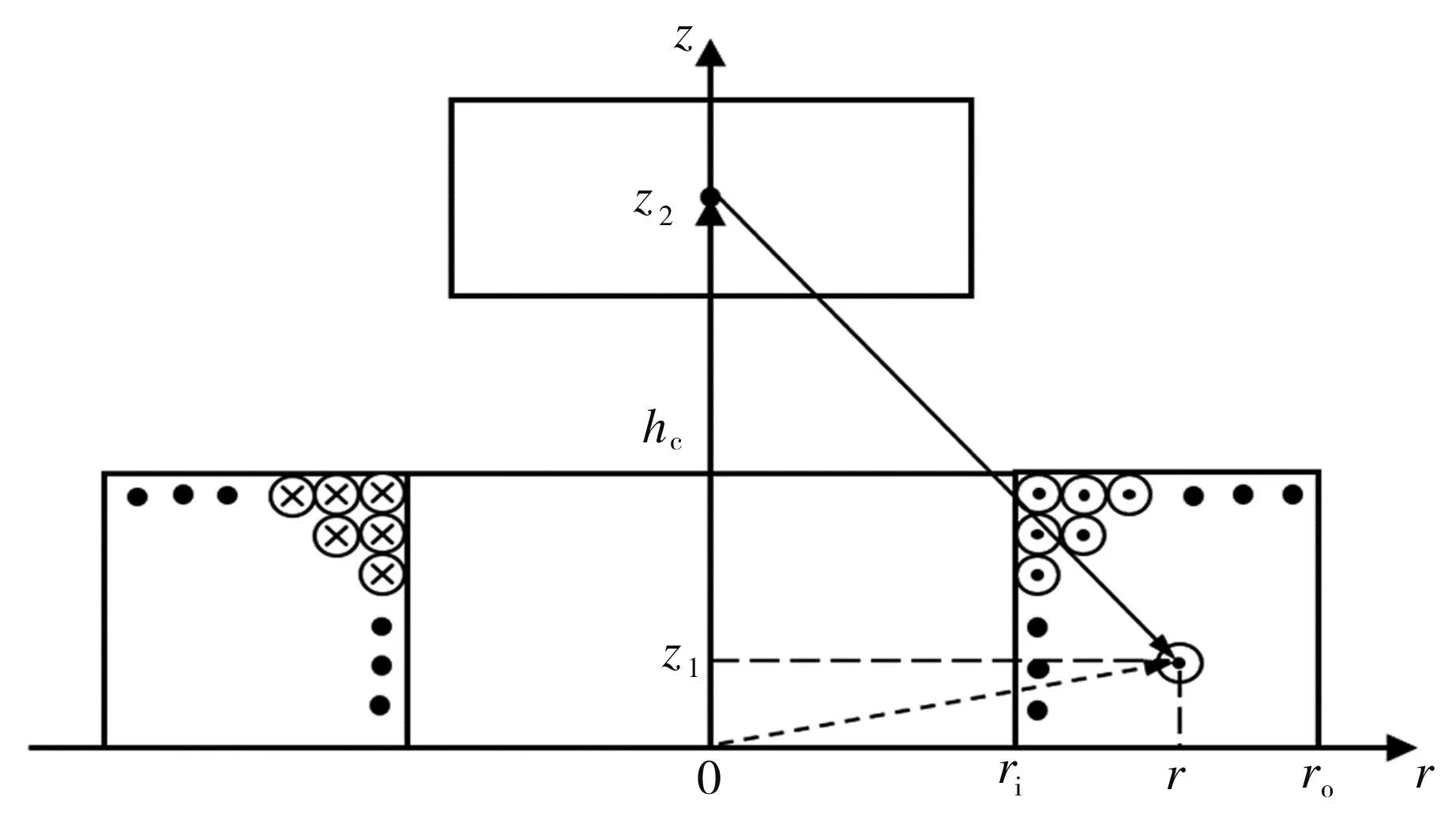
圖4 電磁感應(yīng)原理圖

由式(11)可知電磁機(jī)電耦合系數(shù)與磁鐵的位置有關(guān)。為了方便分析,通常取磁鐵靜止時(shí)的值作為恒定值進(jìn)行研究,即θe=θe(z0)。
系統(tǒng)的電磁能為線圈自有的磁共能,可以表示為
(12)
式中:Lc為感應(yīng)線圈的電感。線圈電感可利用Wheeler公式計(jì)算:
(13)
式中:ra為線圈的平均半徑,ra=(ri+ro)/2。
在電荷輸出和機(jī)械阻尼效應(yīng)作用下,虛功的變分可以表示為
δWnc=-Qp(t)Up(t)-
(14)
對(duì)于內(nèi)、外半徑分別為ri、ro,高為hc的空心螺線管,其電阻為
Rc=2πraNρc
(15)
式中:ρc為漆包線單位長度電阻值。
根據(jù)Galerkin法將橫向位移函數(shù)w(x,t)分解成N個(gè)振形函數(shù)和N個(gè)模態(tài)坐標(biāo)的乘積:
(16)

根據(jù)Euler-Bernoulli梁理論,振形函數(shù)可以設(shè)為
Cnsin(knx)+Dnsinh(knx)
(17)
對(duì)于有末端質(zhì)量塊的懸臂梁,將質(zhì)量塊視為一個(gè)質(zhì)點(diǎn),則其邊界條件和正交性可表示為
(18)
式中:δns代表Kronecker符號(hào)。
由于一階振型對(duì)輸出的影響最大,這里只考慮一階振型,因此橫向位移可以寫為
(19)
磁力勢能由梁端部的運(yùn)動(dòng)磁鐵A和外部靜止磁鐵B相互作用產(chǎn)生,其幾何關(guān)系如圖5所示。圖中,mA=(-MAVAsinα,MAVAcosα),mB=(0,MBVB),其中MA、MB分別為磁鐵A和磁鐵B的磁化強(qiáng)度,VA、VB分別為磁鐵A和磁鐵B的體積。
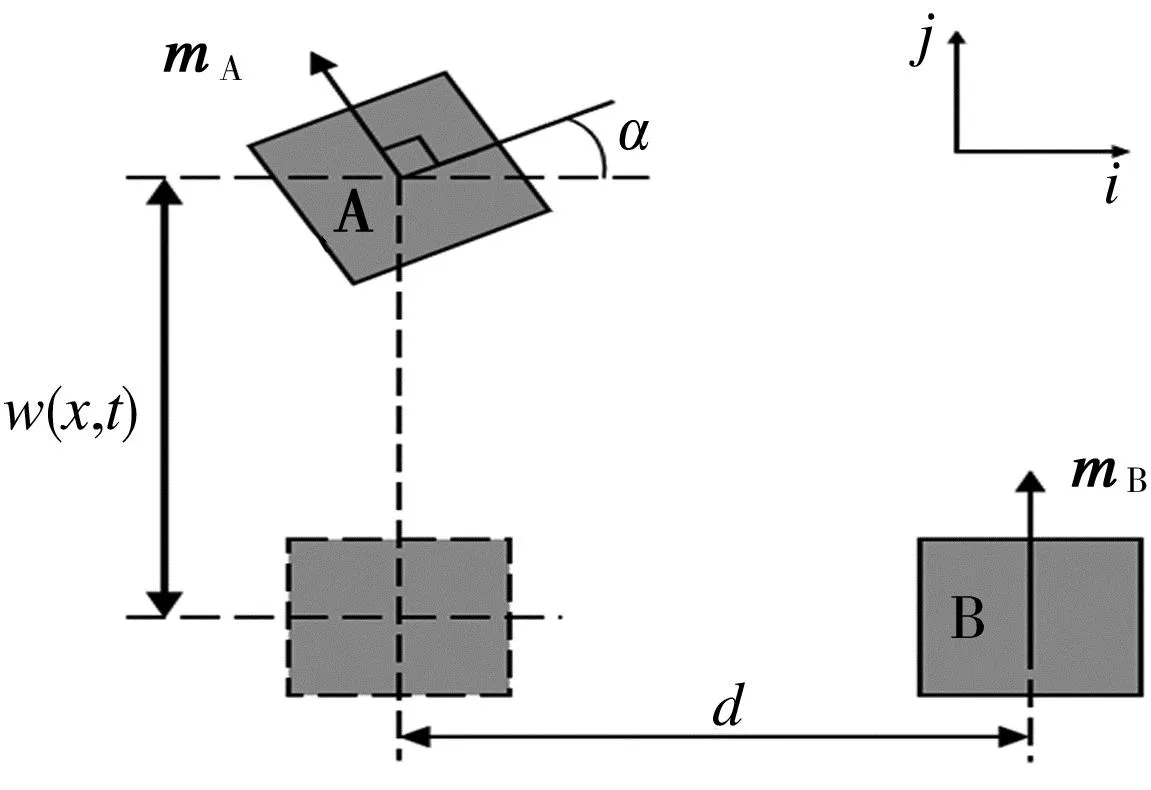
圖5 磁場模型
根據(jù)磁偶極子模型可知磁場強(qiáng)度表達(dá)式為
(20)
式中:rBA=(-d,w)。
磁力勢能可以表示為
(21)
其中,
(22)
(23)

系統(tǒng)動(dòng)能變分為
(24)
彈性勢能變分為
(25)
電勢能變分為

(26)
式中:Cp為等效電容。
電磁能變分為
(27)
虛功變分為
(28)
磁力勢能變分為
(29)
將上面各部分變分代入式(7),由于η(t)、Qm(t)、Qp(t)為獨(dú)立變量,故可分離變量得到:
(30)
(31)
(32)
其中,
(33)
(34)
(35)
(36)

假設(shè)懸臂梁式壓電-電磁復(fù)合俘能器的動(dòng)力學(xué)解為
(37)
可以得到上式中各階次和高次項(xiàng)的表達(dá)式:
(38)
式(38)中:H.O.H代表高次諧波項(xiàng),在后續(xù)計(jì)算中將其忽略。
將式(37)和式(38)代入式(34)~式(36)中,平衡諧波項(xiàng)和常數(shù)項(xiàng)的系數(shù),可以得到:
-b6S(A1A2+B1B2)=0
(39)
(40)
(41)
(42)
(43)
(44)
(45)
(46)

同樣,式(42)~式(45)可以寫為
(47)

通過式(47)可以得到壓電和電磁部分的穩(wěn)態(tài)解析解為
(48)
將上述穩(wěn)態(tài)解帶入式(46),可以得到振幅方程的穩(wěn)態(tài)解:
(49)

結(jié)合式(48)化簡,可以得到無量綱化的壓電電壓、電磁感應(yīng)電流和總功率表達(dá)式為
(50)
對(duì)式(39)進(jìn)行整理可得:
(51)
由式(51)可以得到關(guān)于S的兩個(gè)解。
1)當(dāng)S=0時(shí),系統(tǒng)處于阱間運(yùn)動(dòng);
分別將S的兩個(gè)取值代入運(yùn)動(dòng)方程中,可以得到關(guān)于振幅的隱函數(shù),求解后可以分別得到阱內(nèi)運(yùn)動(dòng)和阱間運(yùn)動(dòng)狀態(tài)下的位移幅值。將式(48)代入式(50),可以求得壓電電壓、電磁感應(yīng)電流和總功率的幅值。
1.3 復(fù)合俘能器穩(wěn)定性判定
前面對(duì)振幅求解時(shí)可以得到多個(gè)解,其中可能包含不穩(wěn)定解,因此需要對(duì)解的穩(wěn)定性進(jìn)行分析。

然后將式(39)~式(45)改寫成為非自治系統(tǒng)的形式,可以得到:
(52)
(53)
如果該矩陣所有特征值的實(shí)部均小于零,則可認(rèn)為此平衡點(diǎn)是穩(wěn)定的,否則便是不穩(wěn)定的。
2 壓電-電磁復(fù)合俘能器仿真分析
根據(jù)上節(jié)分析結(jié)果,本節(jié)運(yùn)用MATLAB軟件針對(duì)懸臂梁式壓電-電磁復(fù)合俘能器的動(dòng)力學(xué)模型進(jìn)行輸出性能仿真分析,探討激勵(lì)振幅、激勵(lì)頻率、磁鐵間距和負(fù)載電阻對(duì)系統(tǒng)輸出性能的影響。仿真中的材料參數(shù)見表1。
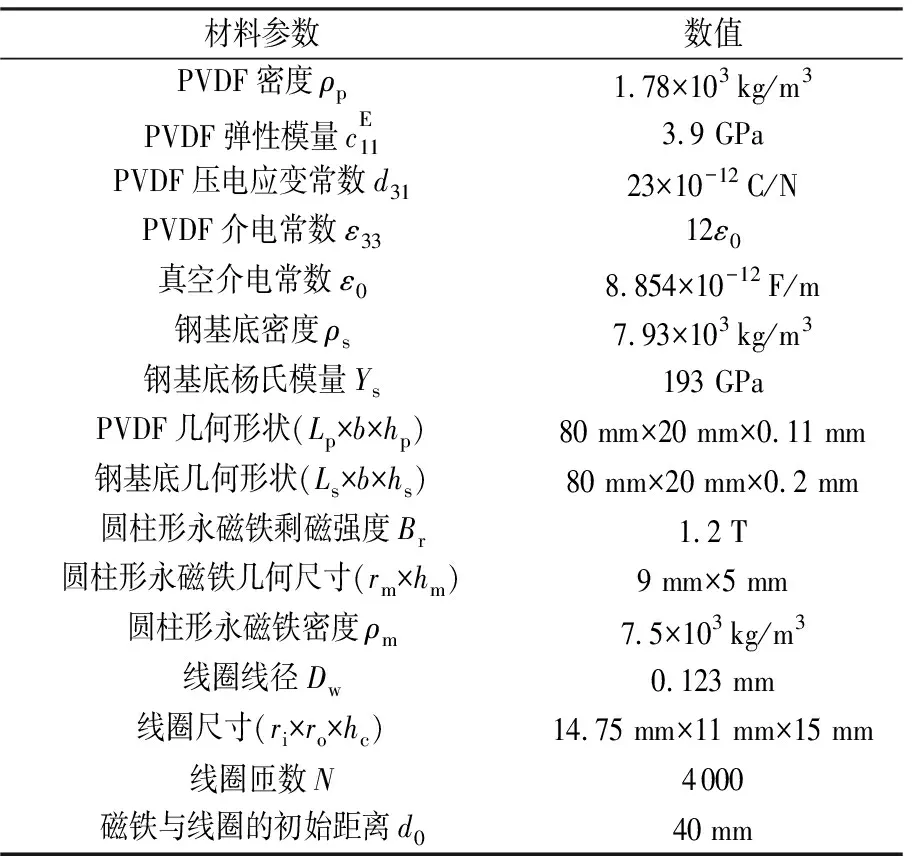
表1 壓電-電磁復(fù)合俘能器材料參數(shù)
2.1 系統(tǒng)雙穩(wěn)態(tài)分析
為了研究動(dòng)磁鐵和靜磁鐵的間距d對(duì)系統(tǒng)雙穩(wěn)態(tài)的影響規(guī)律,利用數(shù)值計(jì)算方法得到d不同時(shí)系統(tǒng)無量綱剛度(b2,b3)和無量綱勢能的變化曲線,如圖6和圖7所示。由圖可知:
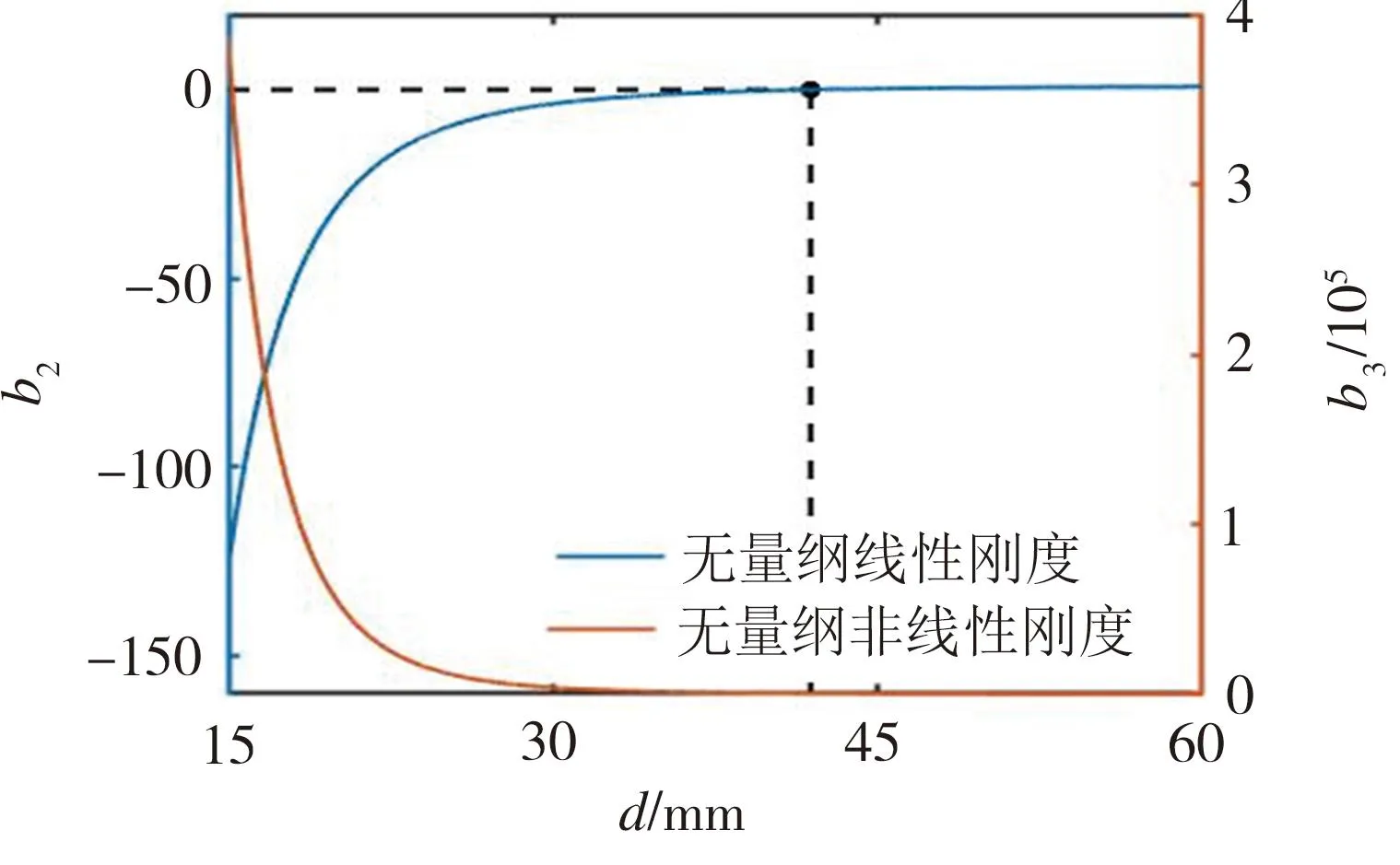
圖6 系統(tǒng)無量綱剛度(b2,b3)與磁距d的關(guān)系曲線
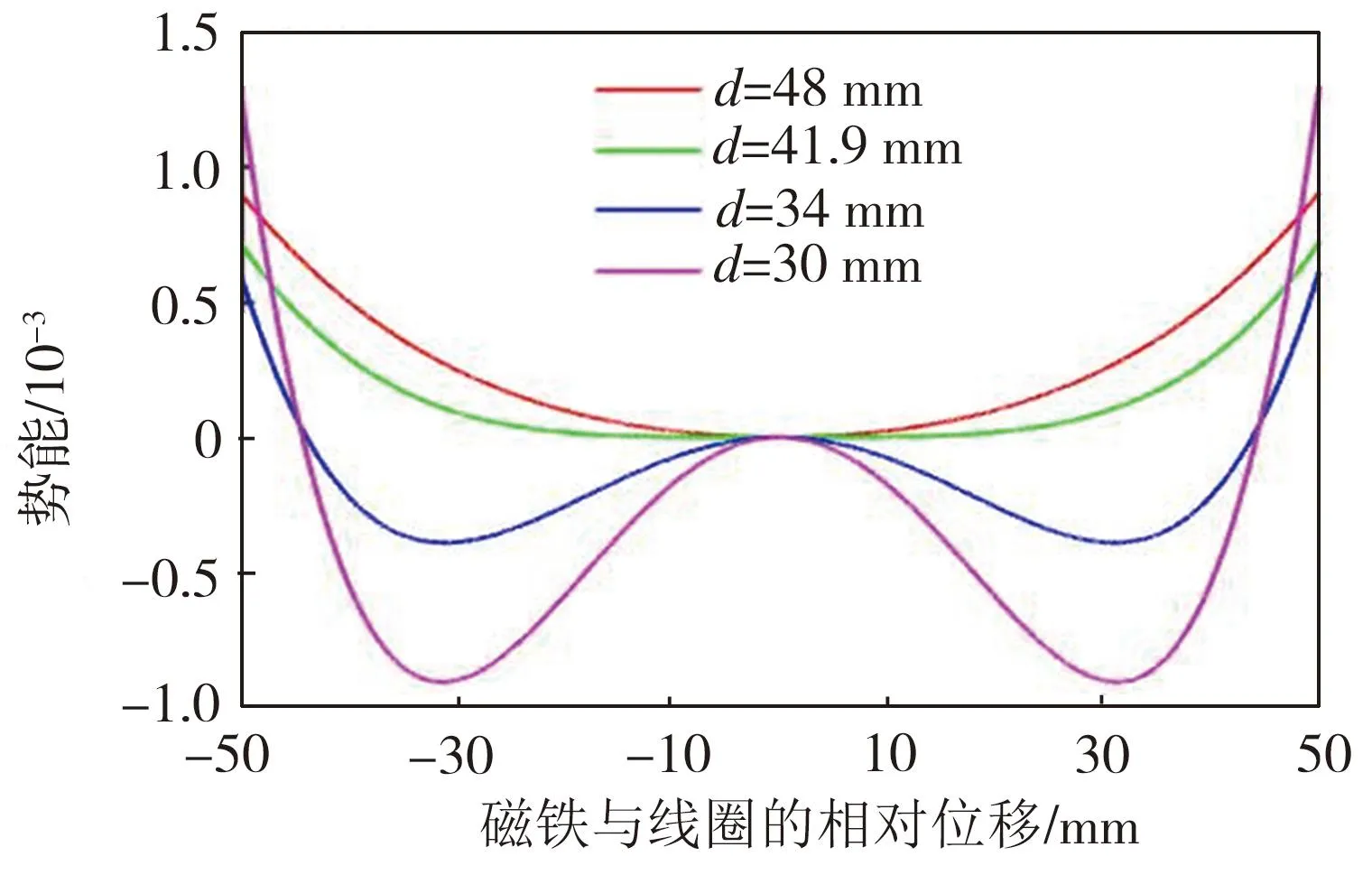
圖7 不同磁距d時(shí)的系統(tǒng)勢能變化曲線
1)當(dāng)d=41.9 mm時(shí),系統(tǒng)線性剛度為0,因此可以將d=41.9 mm看作判斷系統(tǒng)是否呈現(xiàn)雙穩(wěn)態(tài)的分岔點(diǎn):d<41.9 mm時(shí),系統(tǒng)表現(xiàn)為雙穩(wěn)態(tài);d>41.9 mm時(shí),系統(tǒng)表現(xiàn)為單穩(wěn)態(tài)漸硬特性。
2)隨著磁距d的減小,勢壘高度和兩勢阱間的幅度都在增大。這說明磁距越小,系統(tǒng)越過勢壘所需要的能量就越大。
3)當(dāng)磁距d合適時(shí),系統(tǒng)有足夠能量越過勢壘,這時(shí)存在兩個(gè)明顯的勢阱,系統(tǒng)表現(xiàn)出雙穩(wěn)態(tài)運(yùn)動(dòng)行為,系統(tǒng)的振動(dòng)位移幅值得到提高。
2.2 激勵(lì)幅值對(duì)俘能特性的影響
設(shè)置負(fù)載電阻為R1=16.5 MΩ、R2=600 Ω;通過改變激勵(lì)加速度f來調(diào)節(jié)激勵(lì)幅值,f分別取1、3、5、8 m/s2。4種激勵(lì)下,壓電電壓輸出幅值和電磁電流輸出幅值隨頻率比Ω的變化如圖8和圖9所示,其中實(shí)線部分代表經(jīng)Jacobi矩陣分析得到的穩(wěn)定解,而虛線代表不穩(wěn)定解。可以看出,隨著激勵(lì)頻率的不斷增加,阱間運(yùn)動(dòng)的壓電輸出電壓和電磁輸出電流的幅值在逐漸增大,直到激勵(lì)頻率超出頻帶寬度后,系統(tǒng)便落入勢阱中開始做阱內(nèi)運(yùn)動(dòng)。
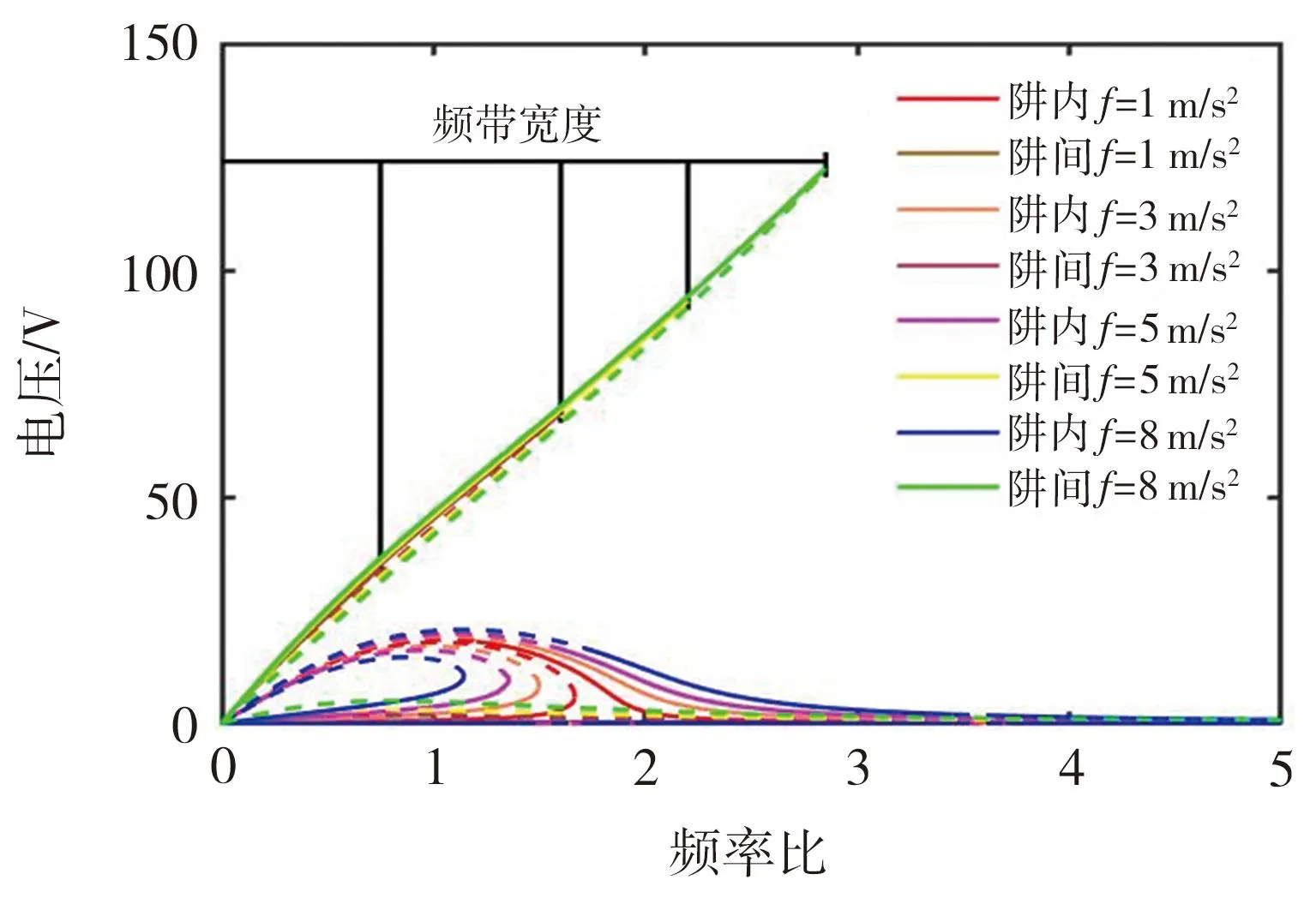
圖8 不同激勵(lì)加速度下的壓電輸出電壓響應(yīng)曲線
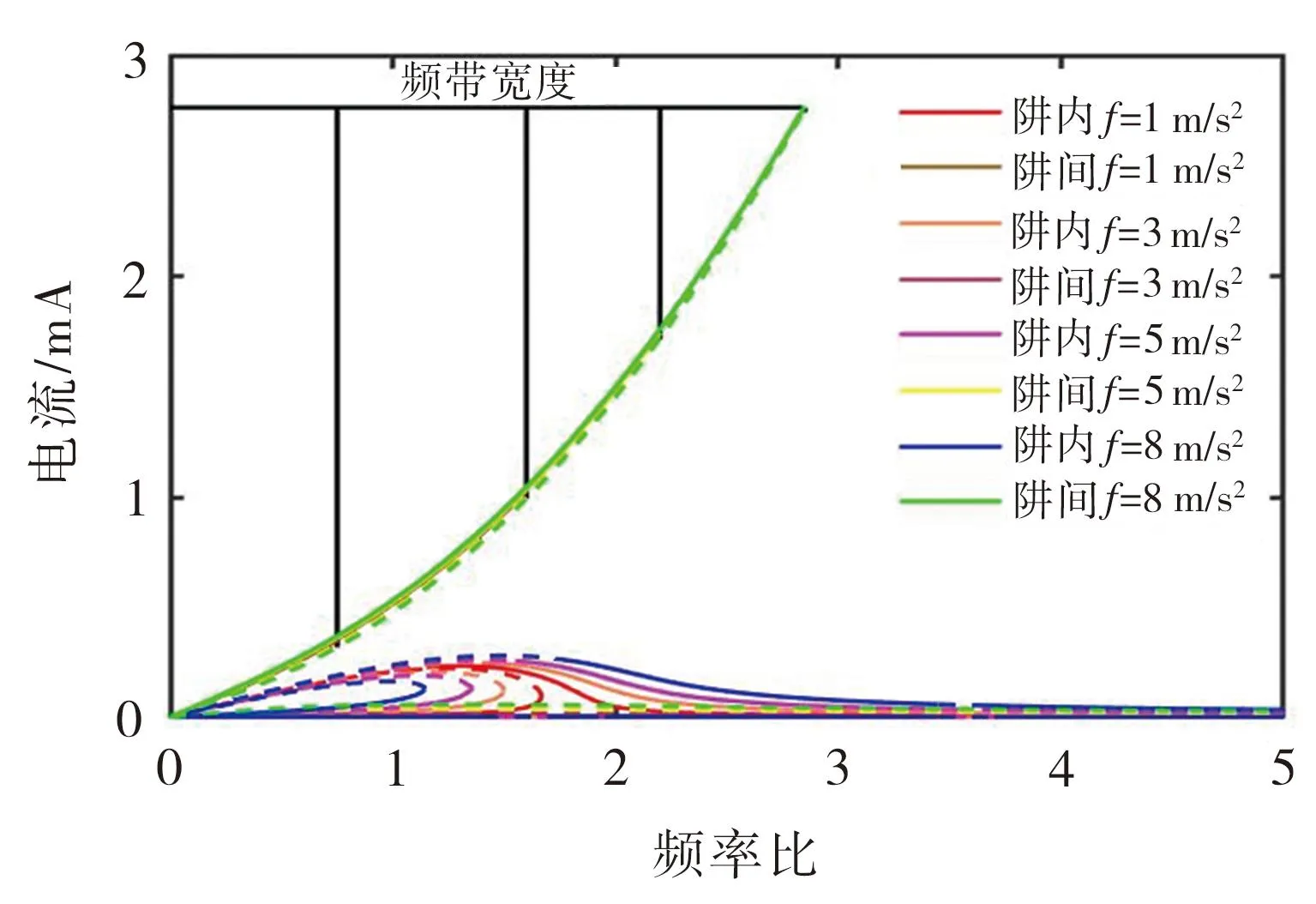
圖9 不同激勵(lì)加速度下的電磁輸出電流響應(yīng)曲線
由圖8和圖9還可以發(fā)現(xiàn),激勵(lì)加速度的增大明顯拓寬了系統(tǒng)阱間運(yùn)動(dòng)的工作頻帶范圍。激勵(lì)加速度從1 m/s2增至8 m/s2,阱間運(yùn)動(dòng)帶寬從0.75倍的固有頻率增大到了2.85倍的固有頻率,但是激勵(lì)加速度的增大對(duì)阱內(nèi)運(yùn)動(dòng)的頻帶范圍影響很小。并且,同樣的激勵(lì)加速度增幅會(huì)明顯提高阱間運(yùn)動(dòng)的壓電輸出電壓和電磁輸出電流,但對(duì)阱內(nèi)運(yùn)動(dòng)的輸出影響很小。
2.3 磁鐵間距對(duì)俘能特性的影響
設(shè)置激勵(lì)加速度為3 m/s2,負(fù)載電阻為R1=16.5 MΩ、R2=600 Ω,動(dòng)磁鐵和靜磁鐵間的初始距離分別取32、34、36、38 mm。分析磁鐵間距對(duì)系統(tǒng)輸出的影響,如圖10和圖11所示,圖中實(shí)線和虛線同樣分別代表穩(wěn)定解和不穩(wěn)定解。
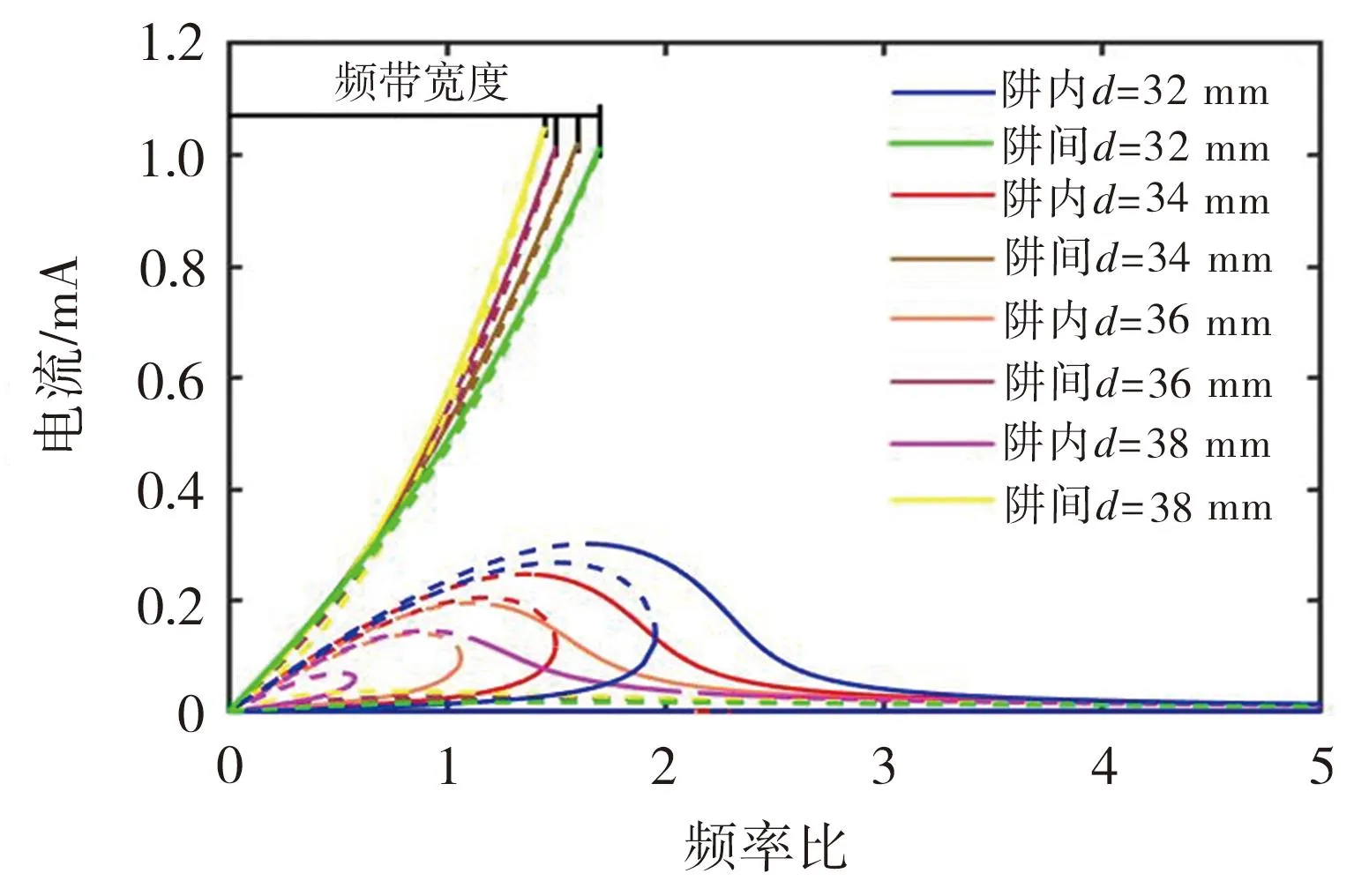
圖11 不同磁鐵間距下的電磁輸出電流響應(yīng)曲線
從圖10可以看出,隨著磁鐵間距的增大,在阱內(nèi)運(yùn)動(dòng)狀態(tài)下,壓電部分最大輸出電壓所對(duì)應(yīng)的頻率會(huì)逐漸減小,同時(shí)穩(wěn)態(tài)解范圍會(huì)擴(kuò)大。對(duì)于阱間運(yùn)動(dòng)來說,隨著磁鐵間距的增大,頻率帶寬會(huì)有所減小,但系統(tǒng)的最大壓電輸出電壓會(huì)有所提高。從圖11可以看出,磁鐵間距以相同幅度改變對(duì)電磁部分在阱間狀態(tài)下的輸出沒有明顯影響,但在阱內(nèi)運(yùn)動(dòng)狀態(tài)下,電磁部分最大輸出電流所對(duì)應(yīng)的頻率會(huì)逐漸減小,同時(shí)穩(wěn)態(tài)解范圍會(huì)擴(kuò)大。
2.4 負(fù)載電阻對(duì)俘能特性的影響
由上述分析可知,系統(tǒng)的最大輸出是在阱間運(yùn)動(dòng)狀態(tài)下出現(xiàn)的,所以本小節(jié)以阱間運(yùn)動(dòng)為對(duì)象進(jìn)行研究。分別取壓電電阻R1為1、5、10、16.5、30、50、70 MΩ,電磁電阻R2為50、100、400、600、1000、2000 Ω,相應(yīng)的系統(tǒng)輸出如圖12~圖15所示。
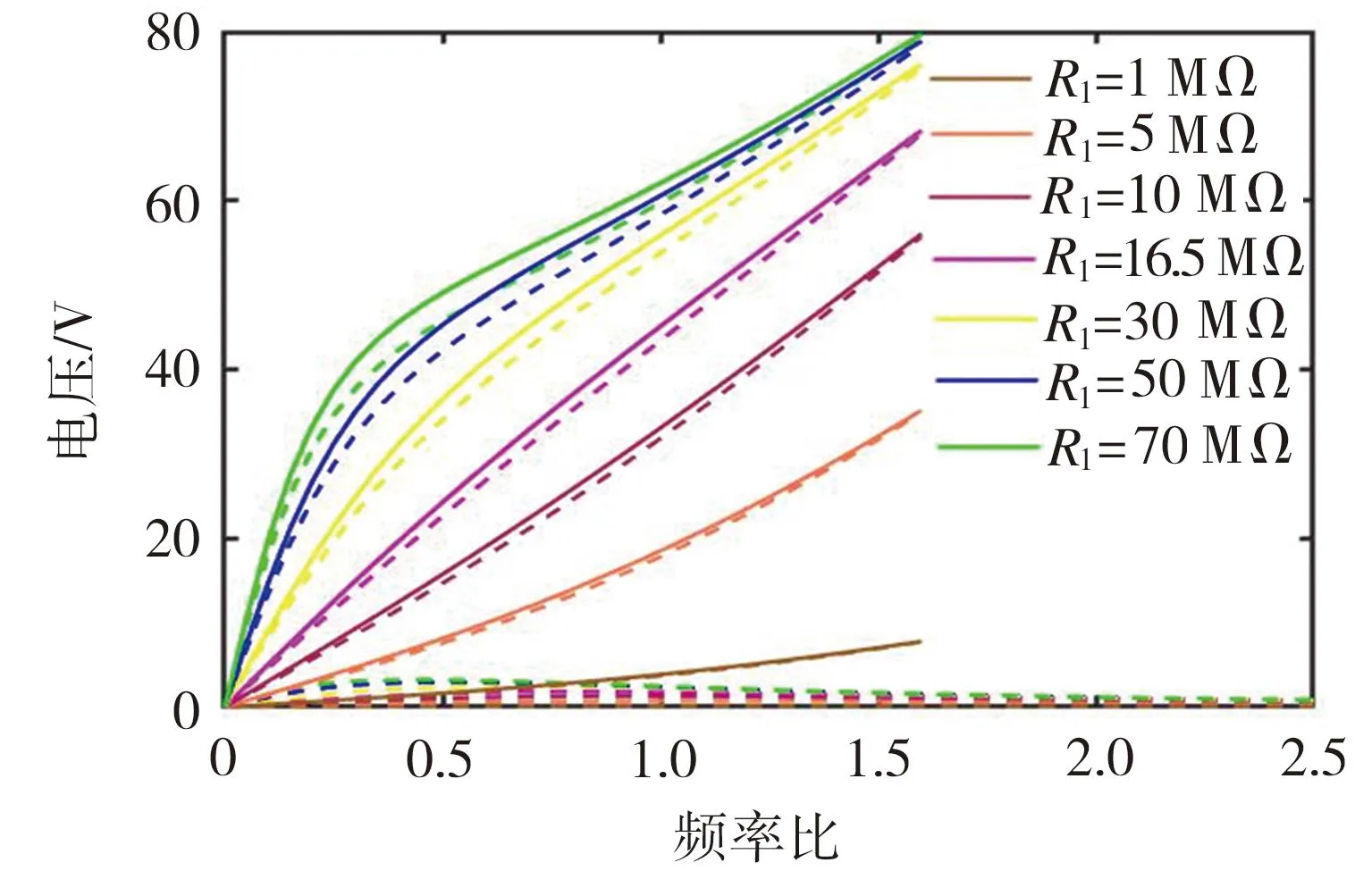
圖12 不同壓電負(fù)載下的壓電輸出電壓響應(yīng)曲線
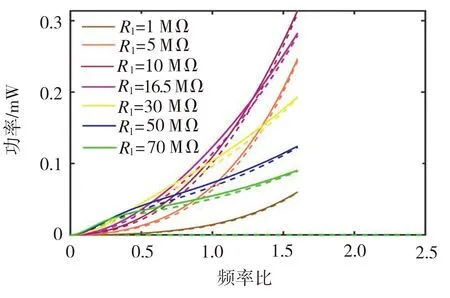
圖13 不同壓電負(fù)載下的壓電輸出功率響應(yīng)曲線

圖14 不同電磁負(fù)載下的電磁輸出電流響應(yīng)曲線
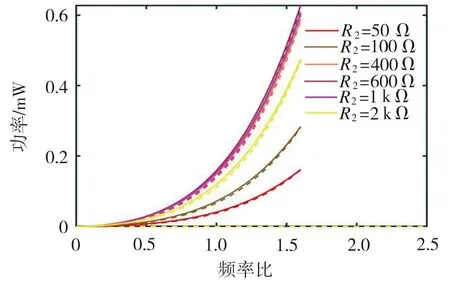
圖15 不同電磁負(fù)載下的電磁輸出功率響應(yīng)曲線
從圖12~圖15可以看出:隨著負(fù)載的增大,壓電俘能部分和電磁俘能部分的輸出功率都呈現(xiàn)出先增大后減小的變化規(guī)律;壓電輸出電壓隨著壓電負(fù)載的增大而升高,電磁輸出電流隨著電磁負(fù)載的增大而降低。同時(shí)發(fā)現(xiàn),不論是壓電負(fù)載還是電磁負(fù)載發(fā)生變化時(shí),阱間運(yùn)動(dòng)的頻率帶寬基本保持不變,均為1.6倍的固有頻率。
系統(tǒng)總輸出是壓電俘能部分和電磁俘能部分的累計(jì)。由于阱間運(yùn)動(dòng)的帶寬不會(huì)隨著負(fù)載而改變,因此保持其他參數(shù)不變,取頻率比為1.6,分析系統(tǒng)的最優(yōu)負(fù)載。圖16所示為俘能器在壓電負(fù)載和電磁負(fù)載同時(shí)變化時(shí)的系統(tǒng)總輸出功率P。可以看出:當(dāng)壓電負(fù)載一定、電磁負(fù)載從100 Ω增至1200 Ω時(shí),總輸出功率先逐漸增大然后略微減小;當(dāng)電磁負(fù)載一定、壓電負(fù)載電阻從0.01 MΩ增至1000 MΩ時(shí),總輸出功率呈現(xiàn)先增大后減小的變化趨勢;總輸出功率隨壓電負(fù)載的變化幅度比其隨電磁負(fù)載的變化幅度要大得多。在壓電負(fù)載為10 MΩ、電磁負(fù)載為680 Ω時(shí),系統(tǒng)的總輸出功率達(dá)到最大,為0.9449 mW。
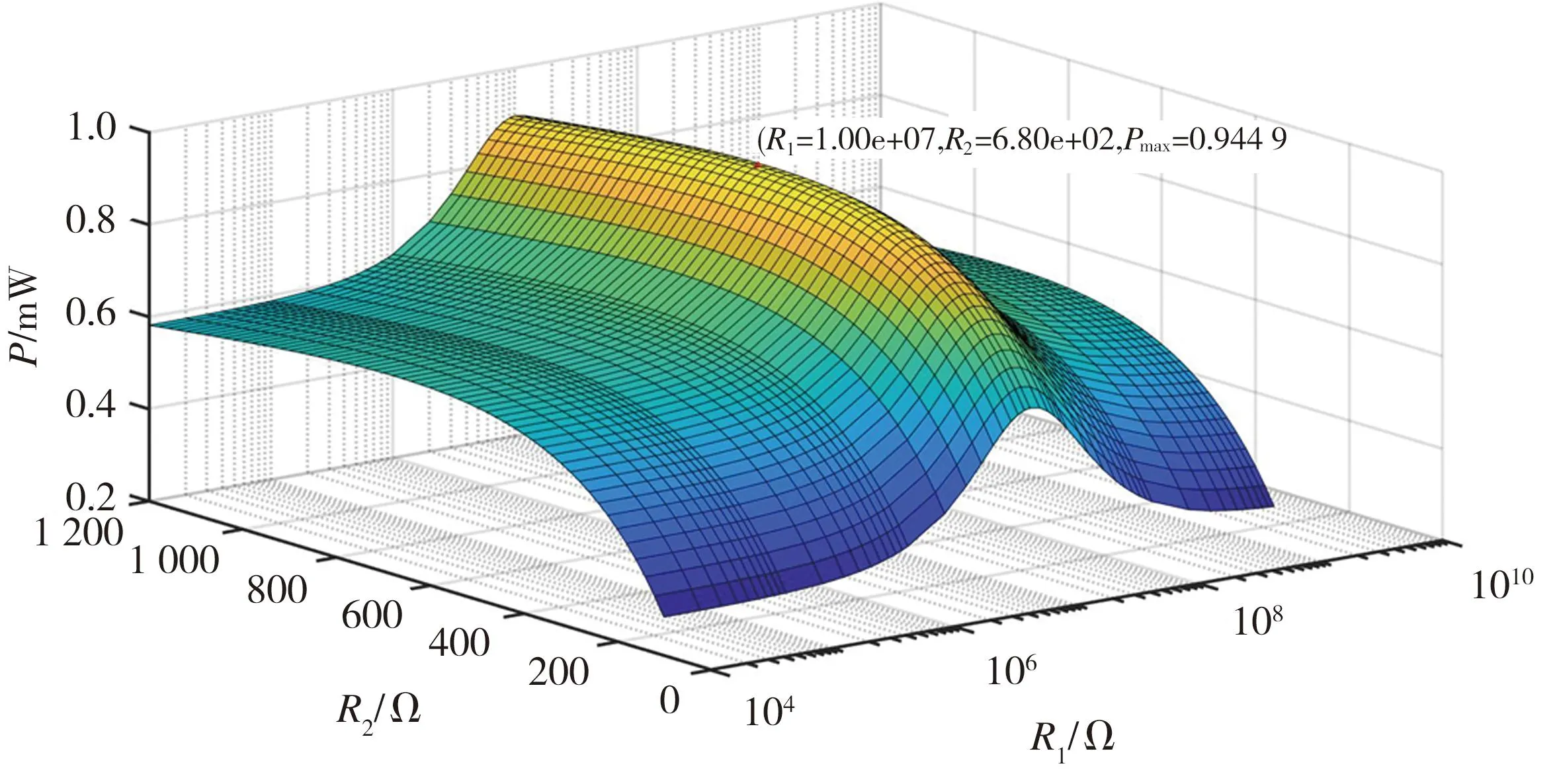
圖16 總輸出功率隨壓電、電磁負(fù)載的變化
系統(tǒng)在阱間運(yùn)動(dòng)狀態(tài)下、激勵(lì)加速度為3 m/s2、頻率比為最優(yōu)值1.6時(shí),壓電部分輸出電壓/功率和電磁部分輸出電流/功率隨負(fù)載的變化情況分別如圖17和圖18所示。由圖17可見,隨著電阻R1的增大,壓電部分輸出電壓逐漸增大,但R1>10 MΩ后,電壓不再明顯增長,同時(shí)壓電部分輸出功率的變化也在該負(fù)載值處出現(xiàn)拐點(diǎn),呈現(xiàn)下降趨勢。因此,系統(tǒng)的最優(yōu)壓電負(fù)載為10 MΩ,對(duì)應(yīng)的最大壓電輸出功率為0.3145 mW。由圖18可見,隨著電阻R2的增大,電磁部分功率也呈現(xiàn)出先增大后減小的變化趨勢,R2=680 Ω時(shí)出現(xiàn)拐點(diǎn),對(duì)應(yīng)的電磁部分最大輸出功率為0.6304 mW。另外,電磁電流隨負(fù)載的增大呈現(xiàn)出緩慢減小的變化趨勢。
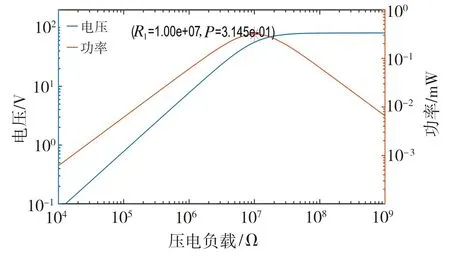
圖17 壓電輸出電壓/功率隨壓電負(fù)載的變化

圖18 電磁輸出電流/功率隨電磁負(fù)載的變化
圖19為系統(tǒng)在阱間運(yùn)動(dòng)狀態(tài)下、電磁負(fù)載取最優(yōu)值(680 Ω)時(shí),壓電輸出功率和電磁輸出功率的占比隨壓電負(fù)載的變化情況。可以看出,隨著壓電負(fù)載的增加,壓電輸出功率占比先增大后減小,當(dāng)壓電負(fù)載為10 MΩ時(shí),壓電輸出功率占比達(dá)到最大(33.28%),此時(shí)電磁輸出功率占比達(dá)到最小(66.72%)。
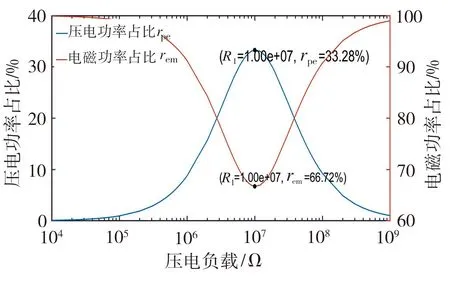
圖19 輸出功率占比隨壓電負(fù)載的變化
圖20為系統(tǒng)在阱間運(yùn)動(dòng)狀態(tài)下、壓電負(fù)載取最優(yōu)值(10 MΩ)時(shí),壓電輸出功率和電磁輸出功率的占比隨電磁負(fù)載的變化情況。可以看出,隨著電磁負(fù)載的增大,電磁輸出功率占比先增大后減小,在電磁負(fù)載大于680 Ω后,電磁輸出占比和壓電輸出占比的變化趨緩。與圖19相對(duì)應(yīng),當(dāng)電磁負(fù)載為680 Ω時(shí),電磁輸出功率占比達(dá)到最大(66.72%),壓電輸出功率占比最小(33.28%)。
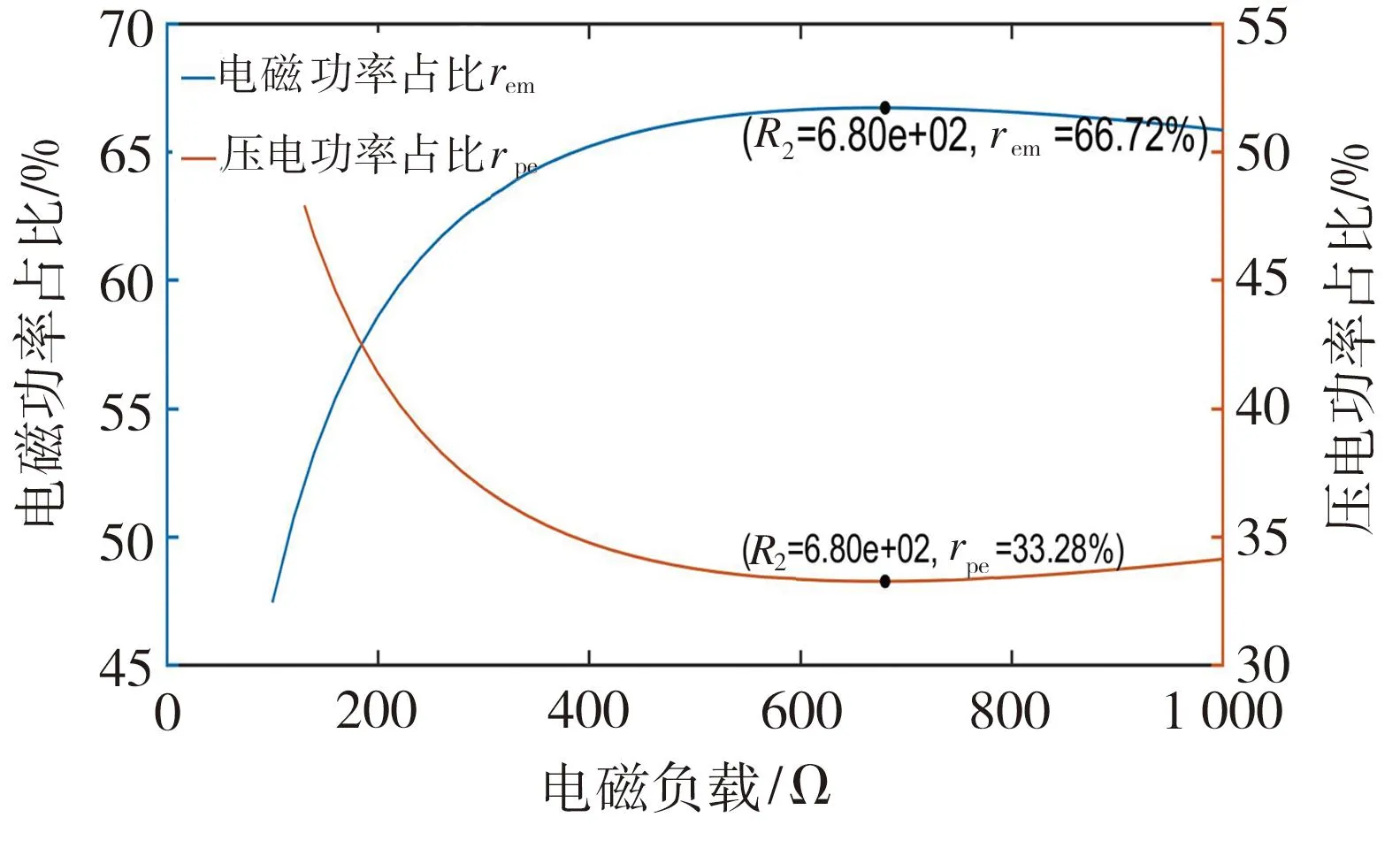
圖20 輸出功率占比隨電磁負(fù)載的變化
3 壓電-電磁復(fù)合俘能器非線性動(dòng)力學(xué)分析
本文研究的復(fù)合俘能器屬于非線性系統(tǒng)。一般非線性系統(tǒng)具有多種復(fù)雜的運(yùn)動(dòng),如混沌運(yùn)動(dòng)、倍周期運(yùn)動(dòng)等。本節(jié)運(yùn)用MATLAB中的龍格-庫塔法進(jìn)行求解,分析激勵(lì)改變對(duì)俘能器動(dòng)力學(xué)行為的影響。
圖21為懸臂梁式壓電-電磁復(fù)合俘能器的系統(tǒng)分岔圖。可以看到,隨著激勵(lì)加速度的增大,懸臂梁表現(xiàn)出豐富的非線性特性。可大致分為以下幾個(gè)階段:當(dāng)激勵(lì)加速度f在0~5.5 m/s2范圍內(nèi)時(shí),懸臂梁振動(dòng)處于周期運(yùn)動(dòng)狀態(tài);當(dāng)f在5.5~7.6 m/s2范圍內(nèi)時(shí),懸臂梁振動(dòng)處于周期運(yùn)動(dòng)與混沌運(yùn)動(dòng)的交替變化中,且前面部分主要表現(xiàn)為混沌運(yùn)動(dòng)狀態(tài),后面部分主要表現(xiàn)為周期運(yùn)動(dòng)狀態(tài);當(dāng)f在7.6~8.9 m/s2以及9.45~10 m/s2范圍內(nèi)時(shí),懸臂梁處于混沌運(yùn)動(dòng)狀態(tài);當(dāng)f在8.9~9.45 m/s2范圍內(nèi)時(shí),懸臂梁處于周期運(yùn)動(dòng)狀態(tài)。
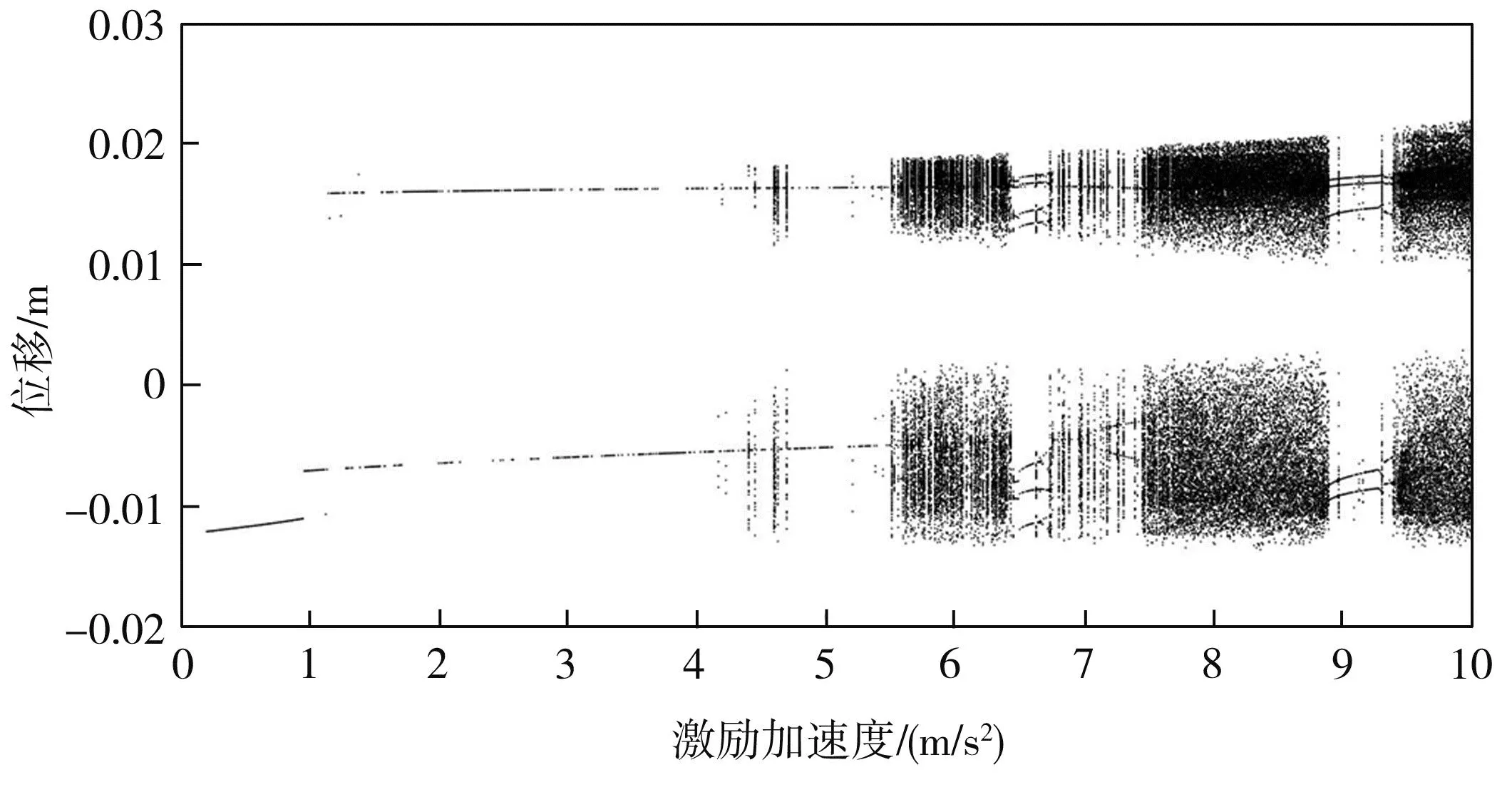
圖21 壓電-電磁復(fù)合俘能器的系統(tǒng)分岔圖
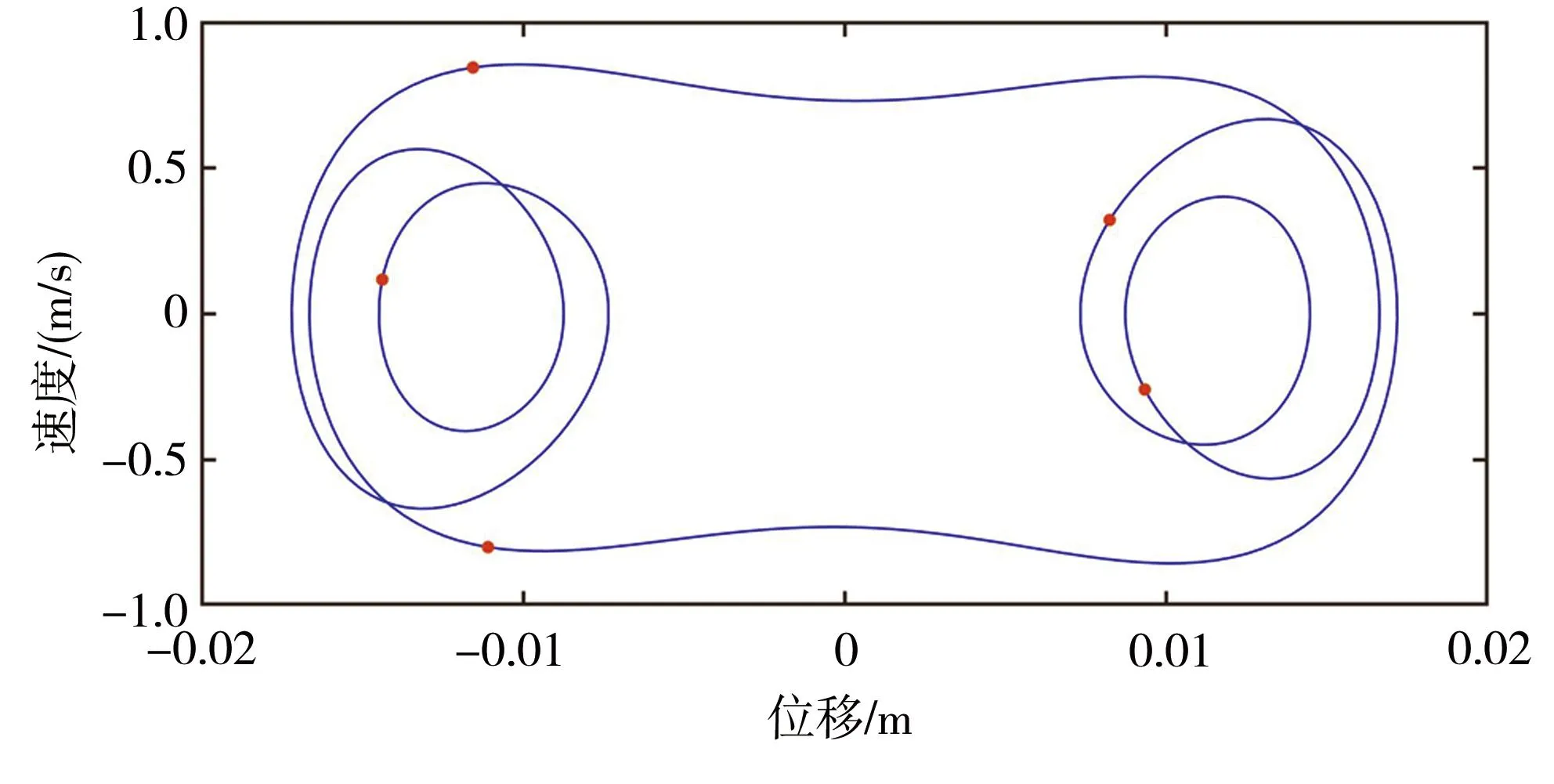
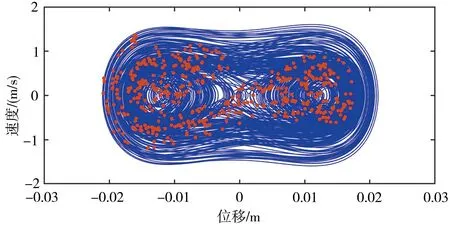
選取f為1、6.15、9.1、9.6 m/s2四種情況進(jìn)行運(yùn)動(dòng)分析。圖22~圖25所示為不同激勵(lì)條件下系統(tǒng)的動(dòng)態(tài)響應(yīng)。f為1 m/s2和9.1 m/s2時(shí),懸臂梁均處于周期運(yùn)動(dòng)狀態(tài),壓電輸出和電磁輸出均為周期性變化。其中,f=1 m/s2時(shí),系統(tǒng)處于單周期運(yùn)動(dòng);f=9.1 m/s2時(shí),系統(tǒng)處于五倍周期運(yùn)動(dòng);同時(shí),隨著激勵(lì)增強(qiáng),時(shí)域波形圖的幅值也在增大。當(dāng)f為6.15 m/s2和9.6 m/s2時(shí),懸臂梁進(jìn)入混沌運(yùn)動(dòng)狀態(tài),此時(shí)壓電輸出電壓和電磁輸出電流均不穩(wěn)定。
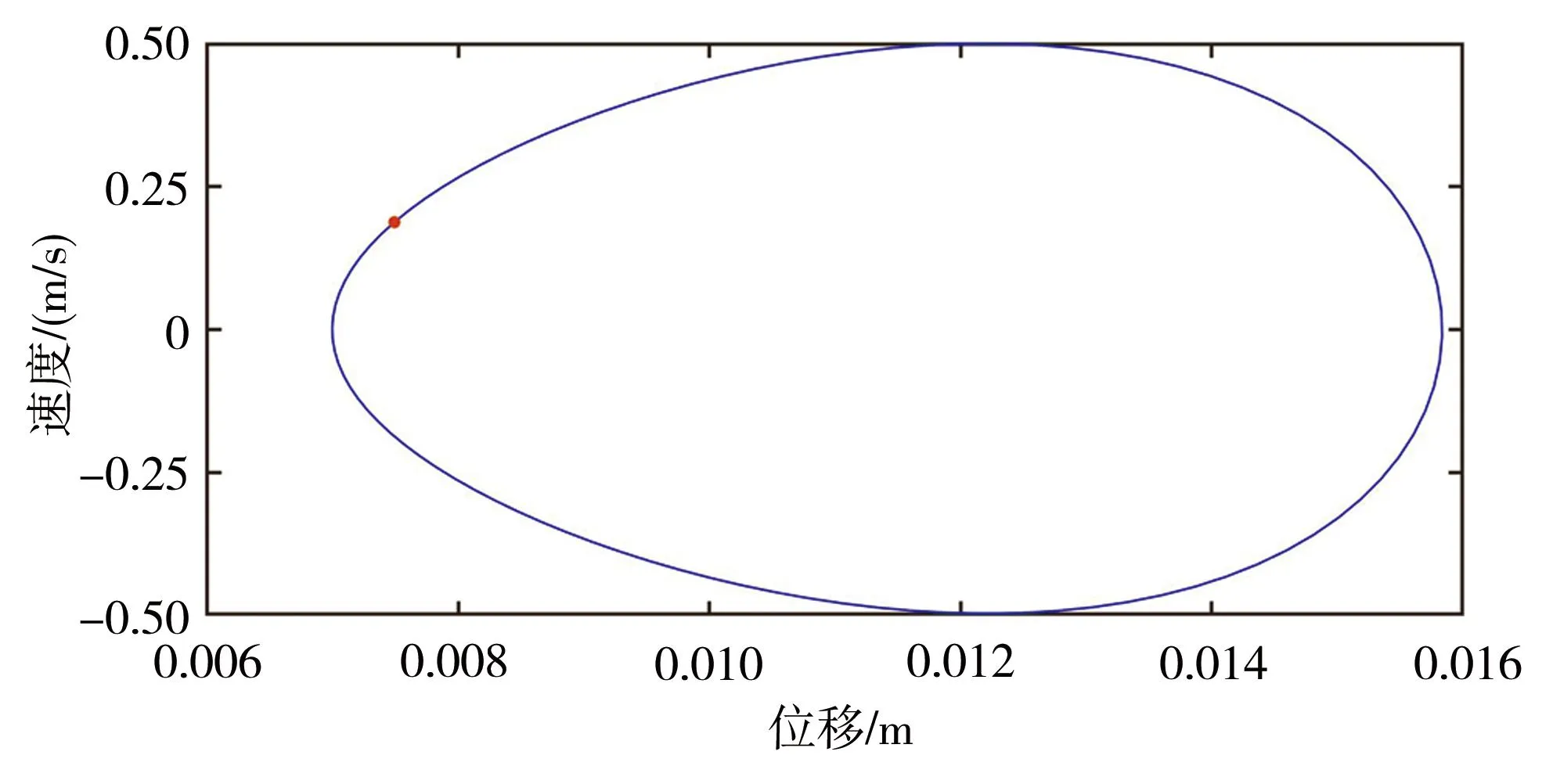
(a)位移-速度相圖及龐加萊截面
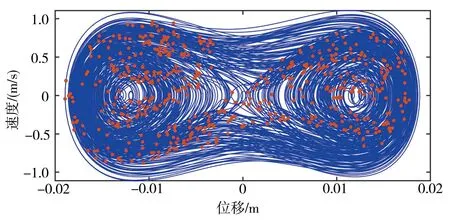
(a)位移-速度相圖及龐加萊截面
(a)位移-速度相圖及龐加萊截面
(a)位移-速度相圖及龐加萊截面
從上面的分析可以得知,懸臂梁式壓電-電磁復(fù)合俘能器系統(tǒng)在激勵(lì)幅值不斷增大時(shí)會(huì)產(chǎn)生周期運(yùn)動(dòng)和混沌運(yùn)動(dòng)的交替變化,并且壓電輸出電壓和電磁輸出電流具有相同的變化情況。也就是說,相圖顯示為周期運(yùn)動(dòng)時(shí),壓電輸出和電磁輸出均發(fā)生周期性變化,相圖顯示為混沌運(yùn)動(dòng)時(shí),壓電輸出和電磁輸出均處于不穩(wěn)定的變化狀態(tài)。
4 壓電-電磁復(fù)合俘能器電路仿真分析
本節(jié)采用Multisim電路仿真軟件對(duì)系統(tǒng)在上述不同激勵(lì)條件下的輸出進(jìn)行整流濾波分析。首先建立壓電部分和電磁部分的等效電路模型。通常前者等效為一個(gè)電流源、后者等效為一個(gè)電壓源,分別如圖26(a)和圖27(a)所示。圖26(b)和圖27(b)分別為壓電和電磁整流濾波電路。
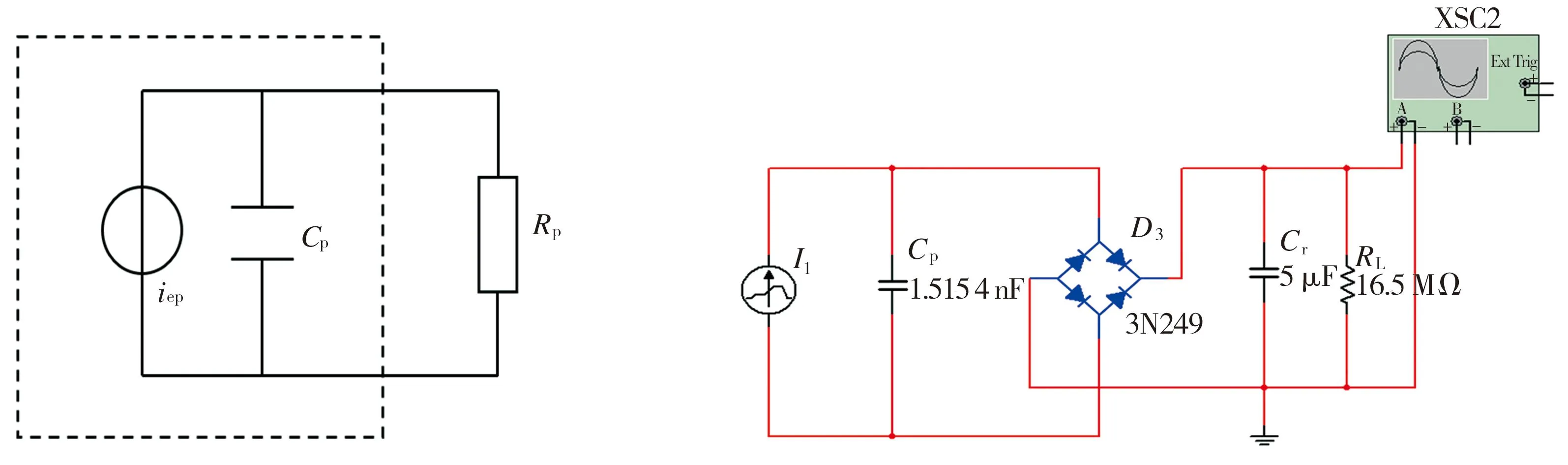
(a)壓電等效電路圖 (b)壓電整流濾波電路
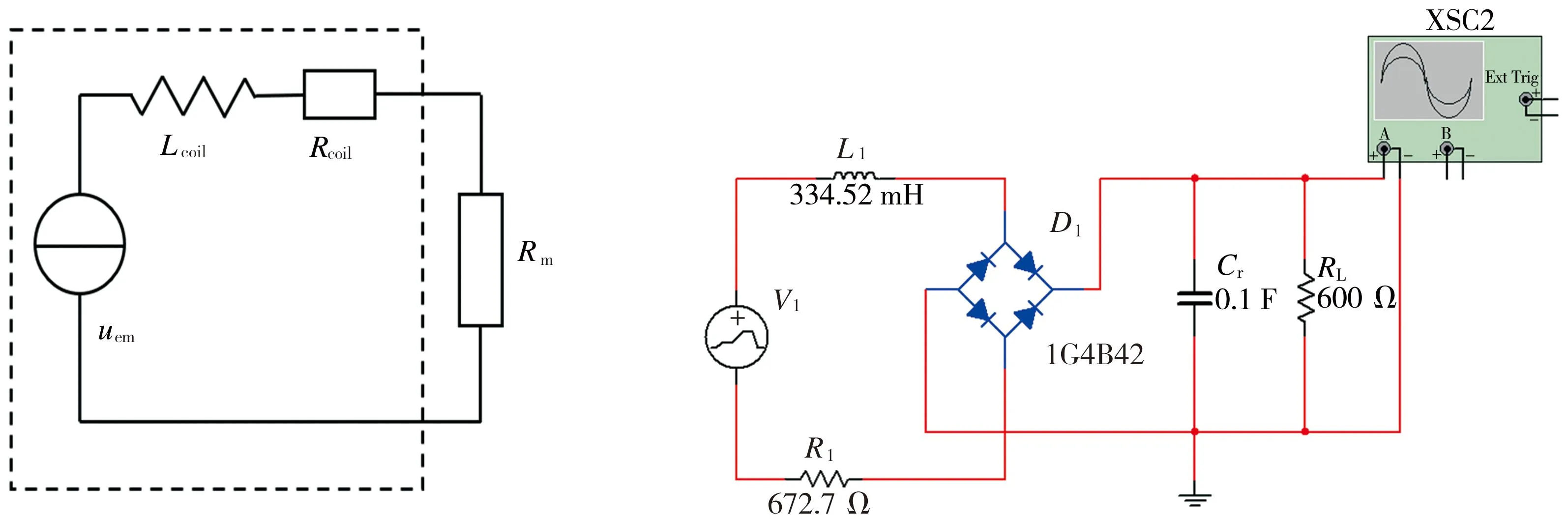
(a)電磁等效電路圖 (b)電磁整流濾波電路
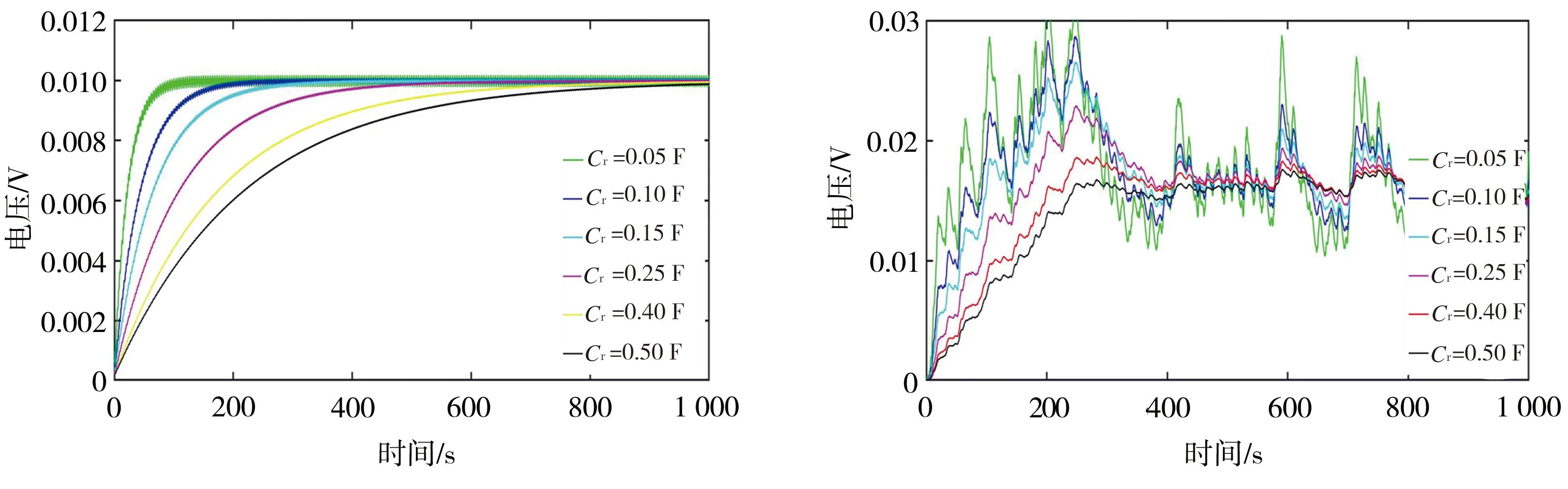
取激勵(lì)加速度為1 m/s2和6.15 m/s2時(shí)的輸出進(jìn)行分析,結(jié)果見圖28~圖29。激勵(lì)加速度為1 m/s2時(shí),改變電路的濾波電容,壓電和電磁整流濾波后的輸出都可以達(dá)到穩(wěn)定狀態(tài),并且電容越大,達(dá)到穩(wěn)定狀態(tài)所需時(shí)間越長,同時(shí)穩(wěn)定狀態(tài)時(shí)的波動(dòng)越小。例如在圖28中,當(dāng)電容Cr=10 μF,系統(tǒng)大概在680 s時(shí)達(dá)到穩(wěn)態(tài);當(dāng)電容Cr=15 μF,系統(tǒng)大概在850 s才能達(dá)到穩(wěn)態(tài)。但是,激勵(lì)加速度為6.15 m/s2時(shí),采用同樣大小的濾波電容,經(jīng)過整流濾波后,壓電和電磁輸出仍然表現(xiàn)出大幅無規(guī)則波動(dòng)。
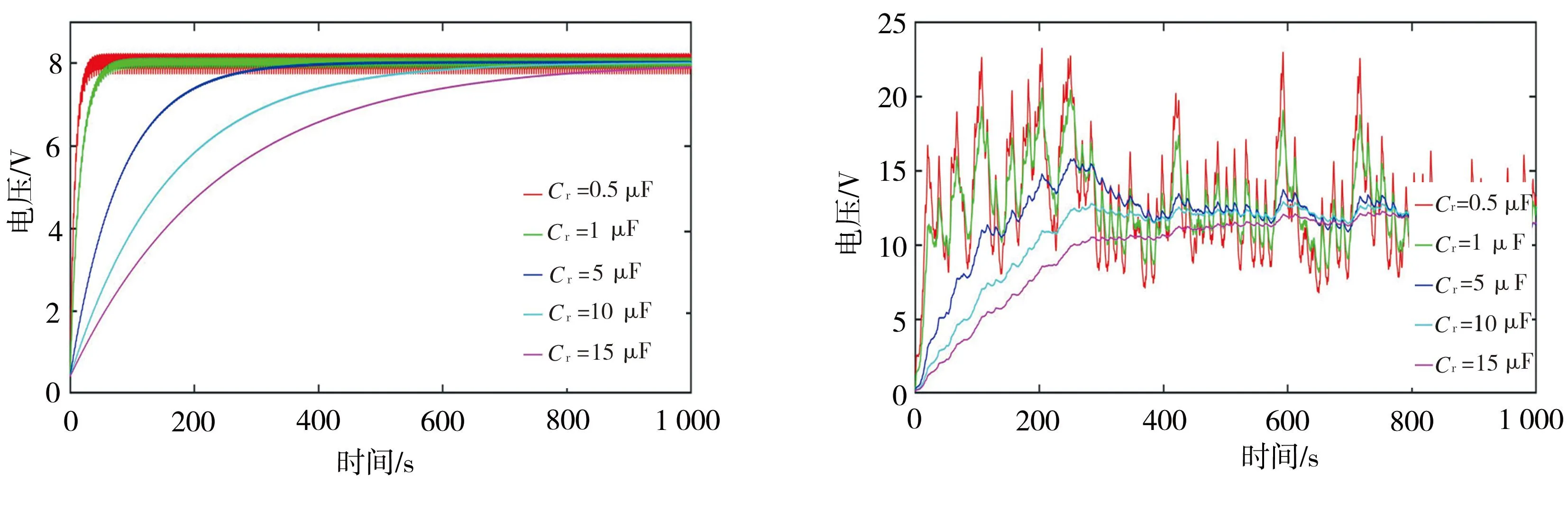
(a) f=1 m/s2 (b)f=6.15 m/s2
(a) f=1 m/s2 (b)f=6.15 m/s2
由以上分析可知,當(dāng)懸臂梁系統(tǒng)處于周期運(yùn)動(dòng)時(shí),不管是電磁輸出還是壓電輸出,在經(jīng)過整流濾波后都可以達(dá)到一個(gè)相對(duì)穩(wěn)定的輸出狀態(tài)。只是濾波電容越大,穩(wěn)定狀態(tài)時(shí)的波動(dòng)越小,但到達(dá)穩(wěn)定所需的時(shí)間越長。系統(tǒng)處于混沌運(yùn)動(dòng)時(shí),系統(tǒng)輸出無法通過標(biāo)準(zhǔn)整流電路和濾波電容進(jìn)行整流濾波而達(dá)到穩(wěn)定狀態(tài)。
5 結(jié)論
本文提出了一種雙穩(wěn)態(tài)懸臂梁壓電-電磁復(fù)合俘能器結(jié)構(gòu),基于Euler-Bernoulli梁理論和Hamilton原理建立系統(tǒng)的非線性動(dòng)力學(xué)模型,利用諧波平衡法進(jìn)行求解;通過MATLAB仿真分析了激勵(lì)幅值、激勵(lì)頻率、磁鐵間距和負(fù)載電阻對(duì)俘能器輸出性能的影響,然后運(yùn)用龍格-庫塔法進(jìn)行系統(tǒng)非線性動(dòng)力學(xué)分析;最后采用Multisim軟件進(jìn)行整流濾波分析。研究得到如下結(jié)論:
1)對(duì)于具有幾何非線性結(jié)構(gòu)的俘能器,隨著激勵(lì)幅值的增大,阱間運(yùn)動(dòng)的頻率帶寬增大。磁鐵間距的改變對(duì)阱間運(yùn)動(dòng)的帶寬影響不大。負(fù)載電阻的變化不會(huì)影響系統(tǒng)阱間運(yùn)動(dòng)的頻率帶寬。
2)通過電阻掃描可以知道,系統(tǒng)存在一組最優(yōu)負(fù)載使得輸出的總功率達(dá)到最大。本文系統(tǒng)的最優(yōu)壓電負(fù)載為10 MΩ,最優(yōu)電磁負(fù)載為680 Ω。此時(shí)系統(tǒng)俘獲的總功率達(dá)到最大值0.9449 mW。
3)隨著激勵(lì)的增強(qiáng),系統(tǒng)在混沌運(yùn)動(dòng)狀態(tài)和周期運(yùn)動(dòng)狀態(tài)間相互轉(zhuǎn)換。在周期運(yùn)動(dòng)狀態(tài)時(shí),可以利用標(biāo)準(zhǔn)整流濾波電路進(jìn)行能量采集;在混沌運(yùn)動(dòng)狀態(tài)時(shí),標(biāo)準(zhǔn)整流濾波電路無法穩(wěn)定收集系統(tǒng)能量輸出。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32