無人機遙感技術在巡河場景中的應用研究
2024-01-17 13:43:28羅三強朱紅衛
科技創新與應用 2024年2期
羅三強,朱紅衛,朱 瑾,趙 濤
(1.三峽大學 水工程智慧建造與管理湖北省重點實驗室,湖北 宜昌 443002;2.枝江市水利工程質量安全監督站,湖北 宜昌 443000)
江河湖泊具有重要的資源功能和生態功能,是洪水的通道、水資源的載體、生態環境的重要組成部分。隨著經濟社會的發展,人類活動對河湖空間的擠壓和侵占日益嚴重,加強對河湖的動態管理刻不容緩。然而在傳統的河湖動態監測中,工作量大、效率低、交通不便、地形復雜區域監測及取證困難和定量化分析能力不足,基層單位河湖管理存在監管能力薄弱、監管手段滯后、關鍵技術受制等問題。
無人機遙感在收集數據方面具有明顯優勢,也給之后的數據處理帶來了新的挑戰與機遇。一方面,分辨率高、信息量大會導致信息識別提取難度高的問題;另一方面,海量高分辨率的數據急需更精準的分析算法以達到充分利用。而機器學習,為以上問題提供了良好的解決方法。機器學習不僅能夠更為有效地對無人機遙感影像做影像分割處理,提升無人機遙感影像對各類事件的識別精度,還可以模擬極其復雜的關系,為遙感反演提供策略。
1 國內外研究現狀分析
在河湖流域的生態保護方面,無人機技術的應用越來越受到重視。無人機技術可以為巡河管理提供高效、精準的技術手段,同時也可以對河湖流域進行全面、實時的監測和管理,為生態保護工作提供有力支持。
目前,無人機技術在巡河管理任務中的應用已經取得了一定的成果。近年來,國內外學者在無人機遙感的飛行控制與導航系統上,非線性動態控制、神經網絡智能控制方法已展開較為深入的研究。這些新型方法,如自適應控制方法能夠對飛行裝置進行靈活、高精度操控,從源頭上有效保證了無人機遙感作業的平穩性。國外學者Guillaume J.J Ducard 進行大量的實驗研究后明確指出,對于無人機進行卡曼濾波的故障檢測與隔離控制系統,即便是受到外部因素的限制與干擾或是模型未知時,也能實現合理控制,促使系統故障與機體損傷進行重構,實現真正意義上的容錯性飛行控制與導航,進而為無人機遙感作業安全、穩定開展提供相應支持。
2 研究方案
2.1 工程項目概況
沮漳河流域位于長江中游北岸,系長江一級支流。跨襄陽、宜昌、荊州及荊門等地市,流域地勢西北高、東南低。沮漳河集水面積7 305 km2,支流164 條。其中沮河河段長230 km,集水面積3 353 km2,支流67 條。上游地區地勢高峻,河流穿行于叢山之間。中游為低山丘陵,下游進入江漢平原邊緣,地勢開闊坦蕩。
沮漳河已于2019 年完成劃界確權,有清晰的河道管理范圍,便于監控系統的實施和運用,利用上述無人機動態監控、系統監控以及河湖管理動態監控基礎平臺等技術平臺,對沮漳河流域試點進行系統測試和優化,以便在更多河湖推廣該套技術,同時力爭將沮漳河打造成全省河流空間管控的示范。
2.2 應用參數設定
首先在明確無人機巡河區域后需要對巡查區域具體情況進行安全分析。
2.2.1 飛行安全
安全問題一定是擺在第一位的(以大疆精靈4 為例)在實際外場飛行前,請先進行飛行培訓或訓練,比如使用調參軟件中的模擬器進行練習,或由專業人士進行指導等。飛行前須根據飛行要求和限制,選擇合適的飛行環境。
比如大霧天氣,能見度是影響無人機飛行航程重要因素。能見度過低會導致無人機無法正常飛行,無法準確觀察到地面情況,從而影響無人機的安全飛行。
2.2.2 飛行電力續航
無人機的電力續航設定是影響無人機飛行時間的重要因素,各種選型無人機航程及電力續航皆有差異,在經過大量試飛測試研究后發現,無人機的飛行續航時間受天氣氣象因素影響較大,主要有以下幾點。
1)大風天氣。飛行器飛行過程中受到風阻太大會減少電池續航,相對于無風天氣在7 m/s 的平均風速情況下維持10 m/s 的無人機巡河速度會由原實際飛行續航時間30 min 縮減至15 min。
2)寒冷天氣。在寒冷天氣條件下飛行器的電池為了維持溫度也會加快電力的消耗。
3 巡航參數設定與分析
3.1 飛行航線節點設計
節點設計以大疆精靈4 無人機為例,宜昌市黃柏河為研究區,按照巡河實際任務不同,以寬度、需要巡查的河道長度等實際情況進行設置。該航線總長度為14.3 km,預計飛行時間為1 166 s,設置飛行節點數11個,飛行器偏航角為沿航線方向,云臺俯仰角度依照每個航點進行設置,任務完成后自動返航。
3.2 飛行高度及云臺角度
在進行飛行高度以及飛行角度的適應性參數設定之前,可以先進行計算。
首先可以通過無人機的飛行高度、鏡頭參數計算GSD、幅寬,以大疆精靈4 為例,通過官網提供的參數可知:像素為8 192×5 460;像元大小為4.4 μm;焦段為24、35、50 mm;此外,官方給出了GSD 參數,其中,地面分辨率GSD 的單位cm/像素;飛行高度H 的單位m。24 mm 鏡頭,GSD=H/55;35 mm 鏡頭,GSD=H/80;50 mm 鏡頭,GSD=H/114;
因此,假設無人機飛行高度H=120 m,則有
24 mm:GSD 為2.2 cm/pixel,幅寬為178 m×119 m;
35 mm:GSD 為1.5 cm/pixel,幅寬為122 m×81.9 m;
50 mm:GSD 為1 cm/pixel,幅寬為86 m×57 m。
以項目組試驗使用的大疆精靈4 為例飛控系統使用的是GSPRO。
其一,要看選擇的照片尺寸是多大,以及對應的寬高比;
其二,對應高度的分辨率(跟飛行高度有關);例如是Phantom4Pro,照片尺寸為16 MB。
以項目組試驗使用的精靈4 熱紅外系列為例,飛控系統使用的是DJI pilot2。
1)飛行高度。無人機巡河飛行高度主要是為了在合適角度范圍內適配不同寬度的河道而設置,這里以大疆精靈4 無人機為例,項目組在經過大量巡河試飛測試研究發現:
由圖1 可知,飛行高度太低,無法監測河道全貌及河兩岸具體情況;飛行高度太高,無法監測到清晰地物,以及進行判別;飛行高度適中,可以監測河道全貌及河兩岸具體情況。
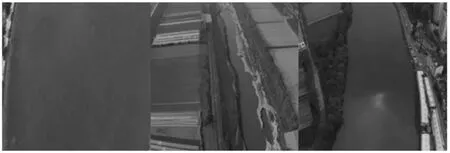
圖1 低飛行高度下拍攝的巡河畫面
采用30°的俯角β(某一固定寬度的河流)的最佳觀測高度。經過之前的無人機巡河活動,可以確認俯角60°以上的俯角不適合用來巡河。而俯角30°較為適宜。以黃柏河的河心公園為例,河面寬度為170 m,對應的視野剛剛符合標準的高度約為110 m,而在320 m 處,對應的高度大約在175 m 左右的位置,對應的河寬(w)與高度(h)的比值(k)估算大約在0.547~0.647 之間比較合適,取0.62 為最佳值,即
h=k·w。
采用45°的俯角β(某一固定寬度的河流)的最佳觀測高度。以黃柏河的河心公園為例,河面寬度為170 m,當無人機至少要飛行到130 m 的高空時才可以清晰完整地觀測到兩側河岸與中間河床,對應的河寬與高度的比值估算大約在0.647~0.765 之間比較合適,取0.7 為最佳值。
采用60°的俯角β(某一固定寬度的河流)的最佳觀測高度。以黃柏河的河心公園為例,河面寬度為170 m,目前采集了若干飛行高度無人機視頻,當高度在約175 m 處所獲得的視角比較合適,對應的河寬與高度的比值估算大約在0.765~1.000 之間比較合適,取0.87 為最佳值(表1)。
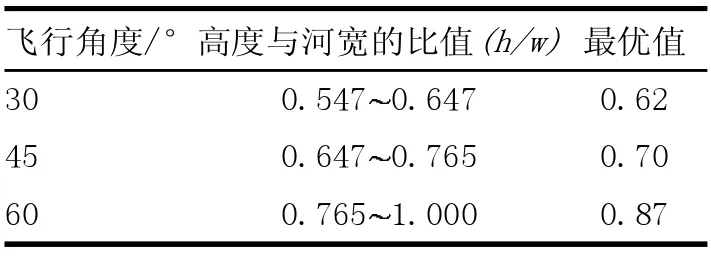
表1 巡河飛行角度適宜設定
當β 值為30°~60°之間時,k=0.000 2 β2-0.009 7 β+0.73。
2)飛行角度。無人機巡河飛行角度主要是為了針對在合適高度范圍內適配不同寬度的河道而設置,這里以大疆精靈4 無人機為例,在經過大量巡河試飛測試研究發現:由圖2 可知,飛行角度太低,前方河道視野太差;飛行角度太高,無法監測到飛行器下方情況;飛行角度適中,既可以監測河道當下位置情況,前方視野也較好。

圖2 不同角度下的無人機航拍視角
在對實際巡河測試數據進行研究發現(以大疆精靈4 為例)在200 m 限高的情況下可以觀測到兩岸視野的極限寬度范圍。經過之前的無人機巡河活動,可以大致確認河寬在320 m 以上的河流不適合只用一臺大疆精靈4 無人機巡河。以黃柏河小溪塔大橋段為例,河寬為448 m,超過了320 m。而該型號的無人機在試驗地段的限飛高度為200 m,對應的河寬大約為320 m。一旦超過320 m,在俯角保持在30~45°的情況下,會難以一次性捕獲兩岸的全部視野。最終得出如下結論。一是無人機巡河時應該高度設置與航線設置應該注意附近的高壓電站與高壓線網的高度,在執行任務前應當肉眼觀察附近的高壓電站分布,再設定飛行的高度和路線。二是試驗數據經過幾何模型估算,大疆精靈4 無人機在100 m 高空以30°俯視角時,掃過的最窄寬度約為139.3 m(表2)。
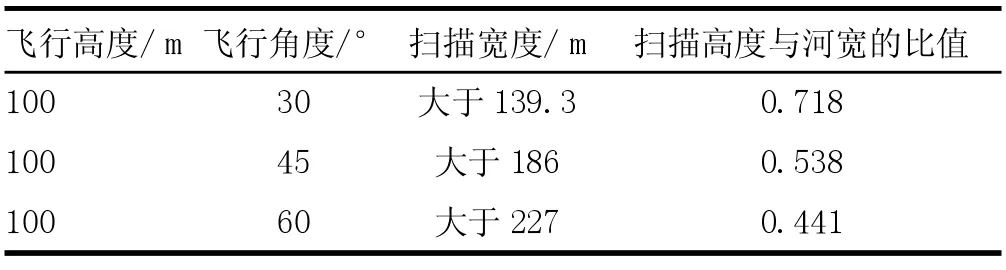
表2 巡河飛行高度適宜設定
3.3 采集影像的對象分析
近年來,由于在海量數據與計算力的加持下,深度學習對圖像數據表現出強大的表示能力,成為了機器視覺的熱點研究方向。圖像的表示學習,或者讓計算機理解圖像是機器視覺的中心問題。圖像理解包括分類、定位、檢測與分割等單個或組合任務。
基于YOLOv5 算法構建訓練集,通過對河湖岸邊建筑物進行自動標識,開發了人機智能交互系統。該系統不僅可實現計算機輔助人工標識疑似違規建筑,而且還可以記錄標識結果,并結合人工智能算法和專家知識,實現高效、準確地識別河湖岸邊違建。此外,該系統還具有以下優點:通過自動標識,可以大大減輕人工標識的工作量,提高工作效率;通過記錄標識結果,可以形成完整的河湖岸邊違建信息庫,為后續治理提供有力的支持;通過結合人工智能算法和專家知識,可以進一步提高違建識別的準確率,避免漏報和誤報的情況發生。交互系統界面如圖3 所示。

圖3 人機智能交互系統界面
4 結束語
在河湖資源保護和管理方面,進行無人機遙感巡河技術的研究和應用具有重要意義。通過無人機遙感巡河技術對水環境、水生態、水文氣象等方面的信息進行采集和處理,可以及時發現和處理水污染等問題,實現對水資源的科學調度和管理,合理利用水資源,滿足不同需求。
首先,需要加強對監測設備的研究和開發,需要加強對監測設備的研究和開發,提高設備的穩定性和可靠性,確保監測數據的有效性和準確性。
其次,需要加強對數據處理和管理的研究。目前,大部分監測數據都是通過計算機網絡進行傳輸和處理的,因此需要建立完善的數據處理和管理系統,確保數據的安全性和可靠性。
綜上所述,在巡河時應用無人機遙感技術是保護和管理河湖資源的重要手段之一。通過對監測設備、數據處理和管理、監測范圍和監測指標以及監測數據的分析和利用等方面的研究和應用,可以更好地保護和管理河湖資源,為人類的生存和發展提供更好的保障。此外,對無人機巡河遙感進行研究還可以促進相關產業的發展和創新,推動經濟的發展和社會的進步。