爬纜機器人運動規劃的幾何優化方法
2024-01-18 08:17:12徐濱
廣東石油化工學院學報 2023年6期
徐濱
(合肥職業技術學院 機電工程學院,安徽 合肥 230012)
軟體機器人主要由楊氏模量較低的材料組成,應用于眾多領域,例如機器人輔助微創手術、激光導航等[1-3]。利用機器人按照指定的規劃路徑進行軌跡跟蹤是最常見的一種應用場景,在實踐中也取得了很好的效果,但對于軟體機器人的軌跡跟蹤來說仍然存在許多挑戰,如軟材料的彈性、特殊的驅動方式等。對于電纜驅動的軟體機器人,需要至少3根驅動纜索才能實現空間的可操作性,通常采用幾何推導的分段常數曲率方法來獲得建模的閉合解[4-7]。
本文通過觀察由驅動和段之間的耦合效應引起的被動軸向壓縮現象,推導出一個線性的多段纜索驅動機器人運動學模型。傳統的分段常數曲率方法為連續體機器人的模型控制提供了基礎框架,但對于纜索驅動的連續體機器人,其適用性不夠好,尤其是應用在彎曲的多個纜索驅動時,將不可避免地引入軸向壓縮和耦合問題。為此,本文考慮了上述條件的任務空間,提供了更高的精度,并開發了多段纜索驅動機器人模擬器來驗證機器人在不同約束條件下的性能,包括固定末端的軌跡跟蹤方向、在末端軌跡跟蹤過程中避開障礙物等。
1 可壓縮曲率模型
利用文獻[4]中的分段常數曲率模型,對于具有N段的多段軟體機器人,其第k個段(k≤N) 可以在配置空間中通過ψk=[θk,φk,κk]T進行幾何參數化,其中,θk∈[0,θmax]表示彎曲角度,φk∈[-π、π)表示彎曲方向的角度,κk是與段Lk的初始未變形長度相關的彎曲曲率,且κk=θk/Lk。因此,第k段相對于基礎框架∑k-1的位置可以表示為
(1)
如圖1所示,第k個段ψk的配置可由電纜驅動推導如下:
(2)
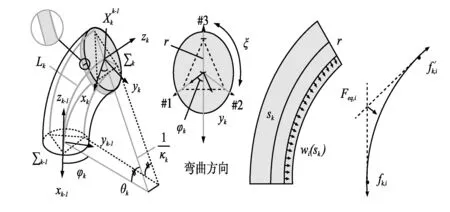
圖1 纜索驅動軟體機器人示意,深色部分表示軸向壓縮
(3)
(4)
式中:r為橫截面中心和電纜通道之間的對稱距離(常量);qk,i?qk為第k段第i根纜索長度的驅動,通過用體內纜索長度Lk,i減去中性線Lk的長度得到
qk,i=Lk,i-Lk=-θkrcos(φk+(i-1)ξ)
(5)
式中:i∈{1,2,3};ξ=2π。
對于n段耦合在一起的多段軟機器人,由于累積張力,其(k-1)段的軸向應變比k段大。假設第k段纜索的拉力為fk=[fk,1,fk,2,fk,3]T,當纜索被驅動并處于平衡狀態時,候選函數fk:Q3→R3可以將關節變量映射為滿足所有qk,i∈Q3準靜態平衡的力向量,其表示為
(6)
在準靜態狀態下,如圖1所示,可以得到單根纜索的靜力平衡方程:
(7)
(8)
式中:Kb=EI為結構的抗彎剛度;Μk=|τk|為第k段的局部彎矩;Мk為受可變長度影響的第k段的彎矩。段壓縮會導致局部彎曲剛度變化,越靠近底座越硬。因此,對于帶有耦合電纜的多段軟機器人,如果不是最末端的段,則每個段的局部彎曲剛度應不同且相關。本文沒有單獨確定局部彎曲剛度,而是制定了響應軸向壓縮的可變剛度。式(8)表明,軸向壓縮不僅會影響末端的定位效果,還會影響到實際應用中逆解的推導。
2 機器人描述
本文利用兩段式的纜索驅動軟體機器人作為原型來進行方法驗證,且安裝了3個帶驅動電纜的伺服電機(偏移量ζ為180°)。機械手垂直安裝在線性滑塊上,形成插入-收縮的組合運動,記為q0,且q0≥0。因此,執行器空間可表示為
q=[q0q1,1q1,2q1,3q2,1q2,2q2,3]T
(9)
式中:qc∶=[q1,1q1,2q1,3q2,1q2,2q2,3]T定義為電纜驅動。使用的電纜材料是編織魚線,其在軸向上相對堅硬(最大拉力為30 kg)。假設在所選伺服電機的驅動下,它們不可拉伸,最大扭矩為10 N·m。因此,電纜的張力可以類似地定向為電機驅動。末端關于空間固定世界框架∑0的齊次變換矩陣可表示為
(10)
式中:H=[0,0,q0]T為滑動運動。
3 基于優化的軌跡跟蹤約束運動規劃
(11)
式中:J(q)∈3×7為推斷冗余機器人的雅可比矩陣;(·)?為右偽逆算子,即JT(JJT)-1。第二項將的分量投影到J的零空間,I是一個7×7的單位矩陣。每次更新雅可比矩陣時,末端位置在無限短時間內的變化Δx可以根據驅動的變化Δq進行近似計算,使得Δq=J?Δx。
由于系統冗余,上述等式可能存在無窮解,可以通過一些數值方法來解決。例如基于雅可比矩陣的滿秩偽逆方法J(q)來求解機器人的逆運動學;或利用最小阻尼-平方逆方法,可以通過正確選擇阻尼參數λ來避免奇點,并提供了一種選擇Δq的數值穩定策略。為了獲取達到理想路徑χd所需的驅動q,該方法通過求解一個凸最小二乘優化問題來計算逆運動學:
(12)
式中:λ∈>0為非零的阻尼常數。這個二次優化問題通過最小化生成的末端位置和期望的末端位置之間的誤差,同時考慮到驅動空間中可行的最小運動問題,從而生成滿足末端路徑跟蹤要求的解Δq。此外,通過式(11)中介紹的零空間來包含更多的子目標,以滿足環境和機器人上所施加的不同約束。


(13)
其中,A=diag(10-3,1,1,1,1,1,1),b=(0.01) ×7,這兩個變量都分別定義了線性不等式的約束。Ωi表示列向量的第i行,ΔΩi是末端方向預期的變化量。基于機器人末端的工作區域,有界條件分別設置為qmin=-[0,2,2,2,2,2,2]T,qmax=[60,0,0,0,0,0,0]T。
與式(12)相比,式(13)中的附加項在線性不等式和有界條件的約束下,可以最小化生成的任務空間方向變化與期望的任務空間方向變化之間的誤差。
4 實驗驗證與分析
4.1 模型驗證
使用改進的可壓縮曲率模型的兩段式纜索驅動機器人,其基本彎曲運動如圖2所示,其中圖2a 為只有近段彎曲;圖2b為只有遠段彎曲;圖2c為兩個段均有彎曲,但近段彎曲補償了遠段彎曲;圖2d為兩段都朝著同一方向彎曲。由圖2可看出,由于耦合效應,驅動的遠端節段將導致近端節段被動彎曲。

圖2 兩段纜索驅動機器人的耦合效應
本文對軟段上的可壓縮曲率模型進行了實驗驗證,首先在纜索驅動機器人的近段上進行平面彎曲試驗。由于材料柔軟,當驅動電纜時,管段將承受軸向壓縮。這里使用了一個不可伸縮的分段常數曲率模型,該模型排除了機器人運動時弧長的變化,即sk(f≠0)=Lk。如圖3所示,組1和組2分別表示總弧長為98,96 mm。

圖3 在軟機器人上驗證可壓縮曲率模型
由圖3可知,一般連續體機器人的不可伸縮分段常數曲率模型對于軟體機器人來說不夠友好。然而,本文提出的可壓縮曲率模型可以更好地預測在給定驅動輸入下的末端位置。
4.2 約束運動規劃
由于施加在不可伸縮纜索上的拉力可以視為纜索的位移,先通過實驗測量施加的拉力和纜索位移之間的比例,即qc=μf,其中μ=18 mm/N,為基于調諧的纜索張力。為了給電機產生平滑的輸入,使用移動中值濾波器來減少其中的周期性趨勢和異常值。接著對固定方向約束下的軌跡跟蹤性能進行了測試。使用時間步長的參數化函數來表示運動軌跡,驗證了計算得到的輸入能夠產生預期的受約束機械手運動,并且達到了滿意的精度水平。
圖4顯示了末端執行器對末端方向垂直于地面的橢圓形的跟蹤結果。圖5顯示了在相同路徑下為纜索驅動機器人分配20°傾斜角時,橢圓形的跟蹤情況。

a 不同時間下位置誤差和方向誤差 b 整體跟蹤性能 a 不同時間下位置誤差和方向誤差 b 整體跟蹤性能
由圖4可知,通過目視測量得出,軸向誤差在2 mm以內,方向誤差在10°以內。由圖5可知,由于機械手試圖在跟蹤過程中彎曲自身以保持特定的末端方向,盡管橢圓路徑長端的定位精度不如垂直情況下的定位精度,但最終結果還是滿足了固定方向的要求。
5 結語
本文提出了一種結合可壓縮曲率建模的方法,用于分段耦合效應下的多段纜索驅動軟機器人的運動規劃。機器人建模主要解決由彈性材料和纜索驅動結構導致的段縮短現象。基于纜索和柔體的力學原理,推導了執行器空間、構形空間和任務空間之間的解耦映射。在此基礎上,設計了一種基于幾何優化的運動規劃算法,以擴展冗余度軟機器人在約束條件下的可控性,包括使用固定方向的末端軌跡跟蹤執行器和操縱器來避免障礙物碰撞。基于一個兩段式的機器人原型進行了數值仿真實驗,驗證和評估所提出的末端軌跡跟蹤算法。該方法可以推廣到約束條件下任意的多段纜索驅動軟機器人運動規劃。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03