高速電動(dòng)手術(shù)工具驅(qū)動(dòng)電機(jī)設(shè)計(jì)及優(yōu)化研究*
2024-01-18 12:27:22魯自強(qiáng)李保國(guó)耿曉斌張?zhí)煲?/span>程云章
生物醫(yī)學(xué)工程研究 2023年4期
關(guān)鍵詞:手術(shù)
魯自強(qiáng),李保國(guó),耿曉斌,張?zhí)煲?程云章△
(1.上海理工大學(xué) 健康科學(xué)與工程學(xué)院,上海 200093;2.上海理工大學(xué) 上海介入醫(yī)療器械工程技術(shù)研究中心,上海 200093)
0 引言
高速電動(dòng)手術(shù)工具是集動(dòng)力輸出、轉(zhuǎn)速控制和手術(shù)操作等功能于一體的醫(yī)療器械,主要由主機(jī)、手柄、工具頭和腳踏開(kāi)關(guān)組成。其核心部件是手柄內(nèi)負(fù)責(zé)提供動(dòng)力的高速驅(qū)動(dòng)電機(jī),可搭配不同工具頭,在手術(shù)中對(duì)人體骨組織進(jìn)行鉆孔、磨削、銑削、割鋸等操作[1]。為保證手術(shù)過(guò)程安全高效,驅(qū)動(dòng)電機(jī)既要擁有較小外形與超高轉(zhuǎn)速,還要能低振動(dòng)、低噪音地平穩(wěn)運(yùn)行且控制響應(yīng)快,在鉆穿骨組織時(shí)能立即停止轉(zhuǎn)動(dòng),避免對(duì)患者造成額外損傷。此外,還需具有較高的耐久性,能經(jīng)受多次嚴(yán)苛的滅菌操作。
目前臨床手術(shù)中對(duì)高速電動(dòng)手術(shù)工具超高轉(zhuǎn)速的需求日益增大,例如顱腦手術(shù)中的顱骨銑削擴(kuò)孔操作,需要驅(qū)動(dòng)電機(jī)在50 000 rpm以上的轉(zhuǎn)速下提供最佳扭矩,以在最短時(shí)間內(nèi)鉸穿最堅(jiān)硬的骨骼,縮短手術(shù)時(shí)間、提升手術(shù)效果[2]。永磁無(wú)刷直流電機(jī)因轉(zhuǎn)速高、噪聲低、體積小、壽命長(zhǎng)、轉(zhuǎn)矩密度大、運(yùn)行穩(wěn)定、維護(hù)方便及可精確控制啟停等[3],已成為高速電動(dòng)手術(shù)工具驅(qū)動(dòng)電機(jī)的主要研究對(duì)象。
在醫(yī)用永磁無(wú)刷直流電機(jī)領(lǐng)域,我國(guó)高性能產(chǎn)品主要依賴(lài)進(jìn)口。基于此,本研究設(shè)計(jì)了一款轉(zhuǎn)速為70 000 rpm的永磁無(wú)刷直流電機(jī),用于高速電動(dòng)手術(shù)工具。通過(guò)對(duì)其主要組成部分進(jìn)行結(jié)構(gòu)選型與參數(shù)計(jì)算;有限元仿真分析驗(yàn)證可行性;并采用響應(yīng)曲面法,在保持電機(jī)外徑不變的情況下,優(yōu)化其內(nèi)部尺寸,以達(dá)到降低空載電流、提高運(yùn)行可靠性的優(yōu)化目標(biāo)。
1 電機(jī)結(jié)構(gòu)選型設(shè)計(jì)
永磁無(wú)刷直流電機(jī)主要由電機(jī)本體、位置檢測(cè)電路和換相控制電路組成,各部分不同的結(jié)構(gòu)設(shè)計(jì)與選材決定其性能特點(diǎn)。
1.1 電機(jī)本體
電機(jī)本體主要包括定子、繞組、轉(zhuǎn)子與永磁體。定子結(jié)構(gòu)采用無(wú)槽設(shè)計(jì),由于無(wú)定子齒,運(yùn)行時(shí)不會(huì)產(chǎn)生齒槽轉(zhuǎn)矩,振動(dòng)和噪聲較低,電機(jī)運(yùn)行更加平穩(wěn),可減小在手術(shù)過(guò)程中對(duì)周?chē)梭w組織造成損傷[4]。定子鐵心材料選擇35H270型硅鋼片,導(dǎo)磁性好且損耗較低。
繞組在定子鐵芯內(nèi)表面分布式布置,繞組間用環(huán)氧樹(shù)脂膠進(jìn)行填充。通過(guò)三相星型接法與外電路進(jìn)行連接,有利于降低電機(jī)空載電流,進(jìn)而減少高速電動(dòng)手術(shù)工具運(yùn)行過(guò)程中所產(chǎn)生的熱量,提升手術(shù)安全性[5]。
內(nèi)轉(zhuǎn)子結(jié)構(gòu)的永磁無(wú)刷直流電機(jī)功率密度大、轉(zhuǎn)動(dòng)慣量小、響應(yīng)快、散熱好,易實(shí)現(xiàn)超高轉(zhuǎn)速及精確控制,且封閉性和抗干擾性更佳[6]。轉(zhuǎn)子鐵心材料同樣選擇35H270型硅鋼片。
本研究選用表貼凸出式永磁體結(jié)構(gòu)進(jìn)行設(shè)計(jì),工藝簡(jiǎn)單、易于優(yōu)化,可降低鐵心損耗、延長(zhǎng)電機(jī)使用壽命,且轉(zhuǎn)矩波動(dòng)小、磁場(chǎng)分布均勻,具有更好的磁通利用率[7]。然而,由于電機(jī)轉(zhuǎn)速較高且永磁材料的承載拉應(yīng)力較小,該結(jié)構(gòu)設(shè)計(jì)需要在永磁體外表面添加一層保護(hù)套,使其免受巨大離心力的損害。永磁體材料選擇N40UH型釹鐵硼,具有高矯頑力、高磁能積和高剩余磁通密度等優(yōu)勢(shì)。由于無(wú)槽結(jié)構(gòu)電機(jī)氣隙長(zhǎng)度較大,故選擇徑向充磁以增大其氣隙磁密。
1.2 位置檢測(cè)電路
永磁無(wú)刷直流電機(jī)根據(jù)轉(zhuǎn)子相對(duì)于定子的位置,進(jìn)行換相導(dǎo)通,使電機(jī)持續(xù)運(yùn)轉(zhuǎn),轉(zhuǎn)子位置信號(hào)由位置檢測(cè)電路負(fù)責(zé)檢測(cè)。本設(shè)計(jì)中,電機(jī)體積空間較充裕,故使用傳感器作為轉(zhuǎn)子位置檢測(cè)方式,兼顧性能與成本。由于霍爾傳感器體積小、精度高,且不易受溫度、壓力等因素干擾[8],能承受手術(shù)前后的高壓滅菌處理,成為最合適的轉(zhuǎn)子位置傳感器。
1.3 換相控制電路
換相控制電路與有刷電機(jī)中機(jī)械電刷和換相器的作用相同,由邏輯控制模塊和功率驅(qū)動(dòng)模塊組成。邏輯控制模塊根據(jù)預(yù)設(shè)的控制策略,將位置檢測(cè)電路檢測(cè)到的轉(zhuǎn)子位置信號(hào)處理為電信號(hào)[9]。微控制器因其處理速度較快、性?xún)r(jià)比高且具有豐富的通用接口與開(kāi)發(fā)工具,廣泛應(yīng)用于高速電動(dòng)手術(shù)工具控制領(lǐng)域。
功率驅(qū)動(dòng)模塊輸出電信號(hào)控制電樞繞組換相導(dǎo)通,產(chǎn)生交變磁場(chǎng),使電機(jī)持續(xù)轉(zhuǎn)動(dòng)。全橋式驅(qū)動(dòng)電路拓?fù)浣Y(jié)構(gòu)設(shè)計(jì)轉(zhuǎn)矩脈動(dòng)小,繞組利用率高,精度、效率和穩(wěn)定性高[10],可滿(mǎn)足手術(shù)中低噪聲、低振動(dòng)的控制要求。
1.4 結(jié)構(gòu)選型方案
本研究永磁無(wú)刷直流電機(jī)的結(jié)構(gòu)選型方案見(jiàn)表1。
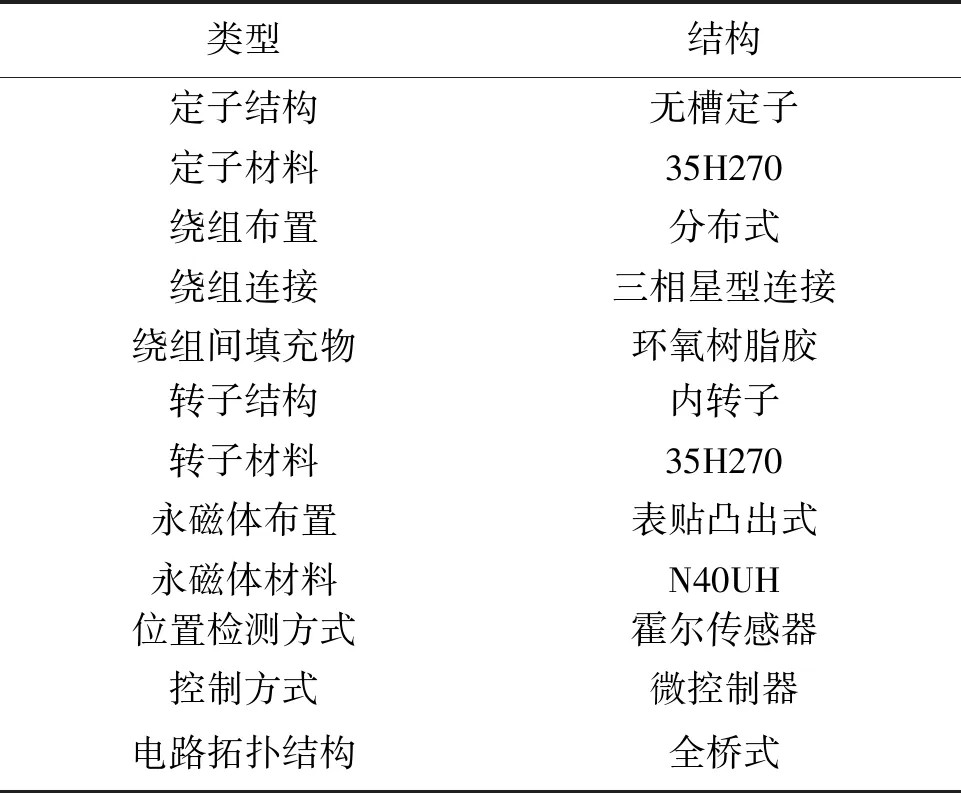
表1 永磁無(wú)刷直流電機(jī)結(jié)構(gòu)選型方案
2 電機(jī)主要參數(shù)計(jì)算
2.1 電機(jī)的數(shù)學(xué)建模
永磁無(wú)刷直流電機(jī)動(dòng)力學(xué)方程[11]如下:
(1)
式中,Va,Vb,Vc是相電壓,ia,ib,ic是相電流,ea,eb,ec是反電動(dòng)勢(shì),R是電阻,L是電感,M是互感。電機(jī)的電磁轉(zhuǎn)矩方程如下:
Te=Pλ(eaia+ebib+ecic)
(2)
式中,P為極數(shù),λ是磁鏈。電機(jī)轉(zhuǎn)速一定時(shí),極數(shù)越少,電機(jī)內(nèi)磁場(chǎng)交變頻率越低,電機(jī)損耗越低[12]。高速電機(jī)通常采用2極或4極結(jié)構(gòu),其中4極結(jié)構(gòu)的電機(jī)繞組端部長(zhǎng)度更短,鐵心軛部厚度更薄,所以,綜合考慮極數(shù)選為4極。電機(jī)速度方程如下:
(3)
式中,J為慣性,Te為電磁轉(zhuǎn)矩,F為粘性摩擦,ωm是機(jī)械速度,Tm是機(jī)械轉(zhuǎn)矩。本研究設(shè)計(jì)的永磁無(wú)刷直流電機(jī)專(zhuān)用于高速電動(dòng)手術(shù)工具,額定轉(zhuǎn)速70 000 rpm,外徑21 mm,軸向長(zhǎng)度30 mm。電機(jī)反電動(dòng)勢(shì)方程如下:
(4)
式中,ke是反電動(dòng)勢(shì)常數(shù),θe是轉(zhuǎn)子角度,函數(shù)F(·)給出反電動(dòng)勢(shì)梯形波。由于電機(jī)通過(guò)軸傳動(dòng)與刀頭連接,在手術(shù)中可通過(guò)刀頭與人體組織形成電流通路,一般要求其反電動(dòng)勢(shì)電壓不能超過(guò)人體安全電壓,以免電機(jī)漏電對(duì)人體造成傷害,通常選用小功率高速驅(qū)動(dòng)電機(jī),因此設(shè)定額定功率為90 W,額定電壓為24 V,額定效率為95%。電機(jī)性能指標(biāo)與主要尺寸的計(jì)算[13]如下:
(5)
式中,Da為定子內(nèi)徑,La為電機(jī)軸向長(zhǎng)度,n為額定轉(zhuǎn)速,P′為計(jì)算功率,ai為計(jì)算極弧系數(shù),AS為電機(jī)的電負(fù)荷,Bδ為電機(jī)的磁負(fù)荷,KΦ為氣隙磁場(chǎng)波形系數(shù),KW為電樞繞組系數(shù)。計(jì)算功率P′計(jì)算如下:
(6)
式中,ηN為額定效率,PN為額定功率。
2.2 性能參數(shù)
根據(jù)以上公式,計(jì)算額定數(shù)據(jù)和主要性能參數(shù)。由于槽數(shù)對(duì)電機(jī)穩(wěn)定性有較大影響,槽數(shù)越多,每槽導(dǎo)體數(shù)越少,所產(chǎn)生的感生電動(dòng)勢(shì)越小,氣隙磁場(chǎng)的諧波幅值越小,有利于電機(jī)換相,且轉(zhuǎn)矩波動(dòng)和轉(zhuǎn)子渦流損耗減少,運(yùn)行更加穩(wěn)定;而槽數(shù)過(guò)多,定子齒寬減小,定子機(jī)械強(qiáng)度和槽的利用率降低,使制造成本增加[14]。無(wú)槽無(wú)刷直流電機(jī)雖無(wú)齒槽結(jié)構(gòu),但有虛槽數(shù),表示每相繞組數(shù)。考慮電機(jī)的穩(wěn)定性以及速度要求,本研究選擇12槽結(jié)構(gòu),最終所得電機(jī)各尺寸參數(shù)設(shè)計(jì)見(jiàn)表2。
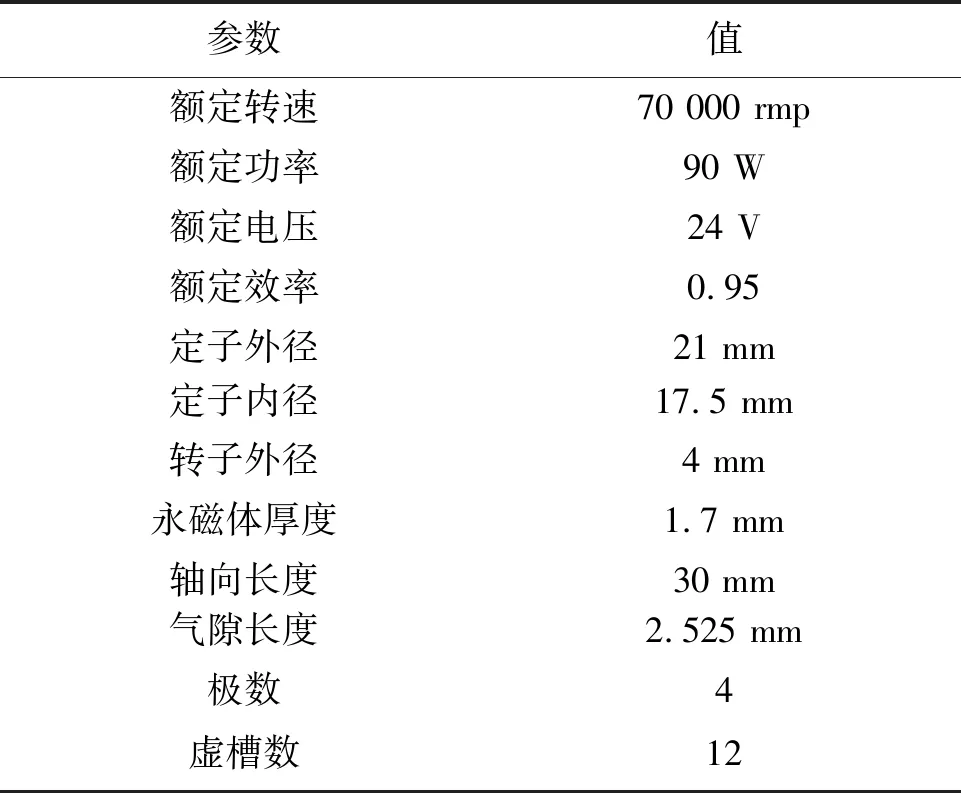
表2 永磁無(wú)刷直流電機(jī)的參數(shù)設(shè)計(jì)
3 電機(jī)有限元仿真分析
3.1 電機(jī)模型的建立
本研究采用Ansys Maxwell軟件對(duì)永磁無(wú)刷直流電機(jī)進(jìn)行建模仿真。根據(jù)已確定的電機(jī)設(shè)計(jì)方案,從RMxprt模塊中導(dǎo)出外電路,繪制電機(jī)結(jié)構(gòu)模型,附加各部分材料,劃分永磁體,對(duì)繞組進(jìn)行分相賦值,設(shè)定轉(zhuǎn)動(dòng)區(qū)域,設(shè)置邊界條件并對(duì)電機(jī)進(jìn)行網(wǎng)格剖分,所得電機(jī)2D、3D模型見(jiàn)圖1[15]。
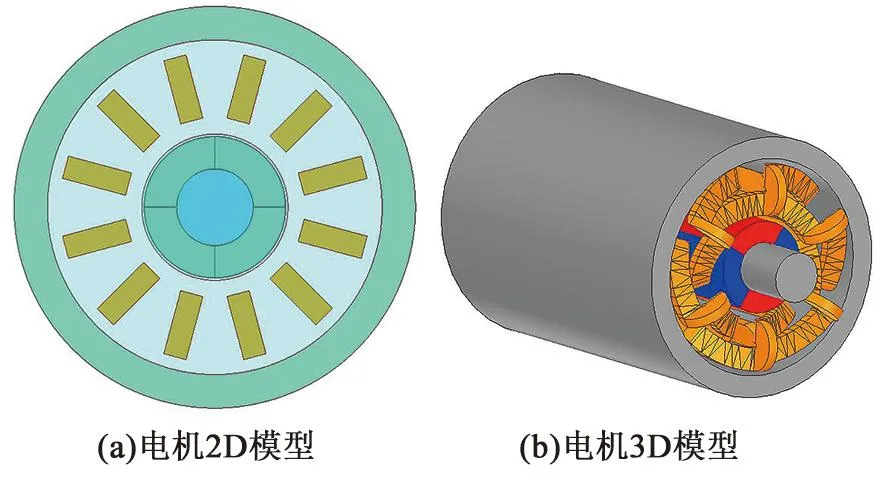
圖1 永磁無(wú)刷直流電機(jī)仿真模型
3.2 穩(wěn)態(tài)仿真分析
通過(guò)穩(wěn)態(tài)仿真分析,檢查電機(jī)的電磁結(jié)構(gòu)設(shè)計(jì)是否合理,結(jié)果見(jiàn)圖2—圖4。由磁場(chǎng)分布圖可知,電機(jī)有4條完整的磁路,磁通分布與走向合理,漏磁系數(shù)較小,符合電機(jī)的4極、內(nèi)轉(zhuǎn)子設(shè)計(jì);由磁密云分布圖可知,磁密云從轉(zhuǎn)子到定子逐漸減弱,符合電機(jī)無(wú)槽結(jié)構(gòu)設(shè)計(jì)[16];磁力線矢量圖中的線段表示磁場(chǎng)流動(dòng)方向,可見(jiàn)電機(jī)磁場(chǎng)從轉(zhuǎn)子 N 極出發(fā),沿著磁路,穿過(guò)氣隙,經(jīng)過(guò)定子,最后流入轉(zhuǎn)子 S 極,形成電機(jī)的有效磁通,驗(yàn)證了電機(jī)電磁結(jié)構(gòu)設(shè)計(jì)的合理性。
3.3 瞬態(tài)仿真分析
通過(guò)瞬態(tài)仿真查看輸出波形,驗(yàn)證電機(jī)性能是否達(dá)到設(shè)計(jì)要求。圖5為電機(jī)空載啟動(dòng)過(guò)程中的轉(zhuǎn)矩變化,可見(jiàn)電機(jī)剛啟動(dòng)時(shí),由于速度很低,需要較大轉(zhuǎn)矩克服靜態(tài)慣性,最高時(shí)接近138 mN·M,之后隨電機(jī)轉(zhuǎn)速的提高而逐漸變小,最后穩(wěn)定在12 mN·M左右,且波動(dòng)較小,這得益于無(wú)槽結(jié)構(gòu)的設(shè)計(jì)優(yōu)勢(shì),可使電機(jī)在手術(shù)運(yùn)行中更加平穩(wěn)。電機(jī)的效率損失與電機(jī)轉(zhuǎn)矩計(jì)算公式T=9 550×P/n計(jì)算所得的12.28 mN·M結(jié)果接近。
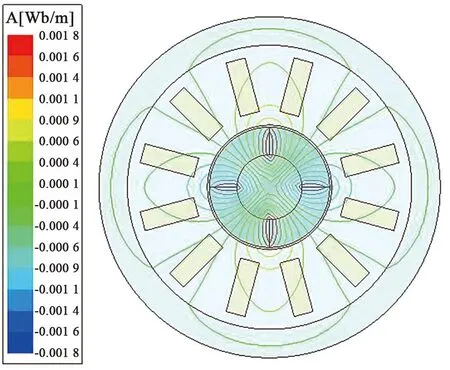
圖2 電機(jī)磁場(chǎng)分布圖
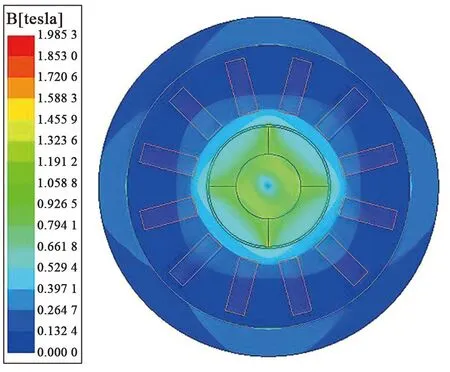
圖3 電機(jī)磁密云分布圖
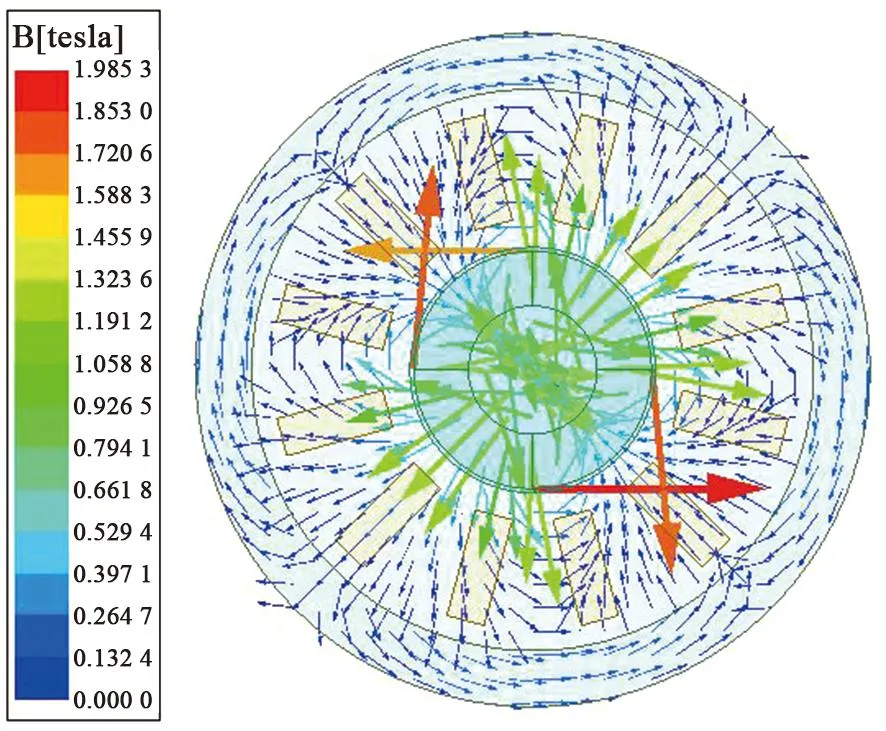
圖4 電機(jī)磁力線矢量圖
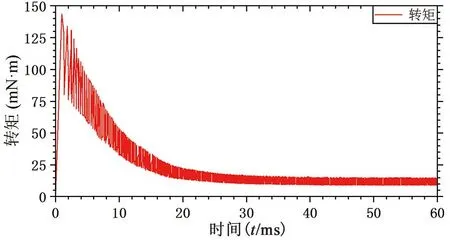
圖5 空載啟動(dòng)過(guò)程中的轉(zhuǎn)矩
圖6為電機(jī)空載啟動(dòng)過(guò)程中的轉(zhuǎn)速變化,可見(jiàn)電機(jī)空載啟動(dòng)后,從0一直加速到70 000 rmp左右,達(dá)到穩(wěn)定狀態(tài)。隨著轉(zhuǎn)矩的變化,轉(zhuǎn)速一開(kāi)始快速增加,然后緩慢增加,直至趨于穩(wěn)定,所用時(shí)間約為56 ms,表明電機(jī)的空載轉(zhuǎn)速達(dá)到設(shè)計(jì)要求。該小型無(wú)槽、無(wú)刷直流電機(jī)其轉(zhuǎn)子轉(zhuǎn)動(dòng)慣量很小,啟動(dòng)時(shí)加速時(shí)間較短,無(wú)齒槽結(jié)構(gòu)依然具有良好的啟動(dòng)性能。
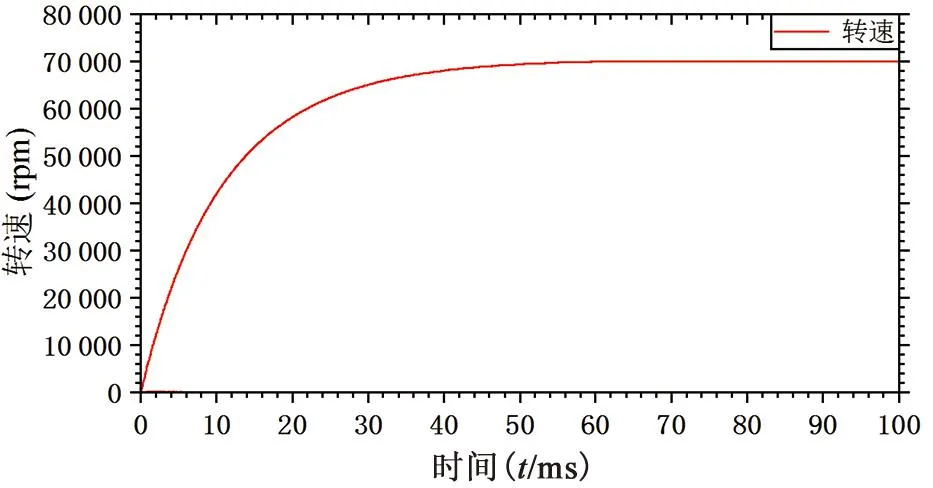
圖6 空載啟動(dòng)過(guò)程中的轉(zhuǎn)速
圖7為電機(jī)空載啟動(dòng)過(guò)程中的電流變化,由圖可知,空載電流在電機(jī)剛啟動(dòng)時(shí)波動(dòng)較大,當(dāng)轉(zhuǎn)速穩(wěn)定后,也隨之趨于穩(wěn)定,但穩(wěn)定后的空載電流仍較大,有效值達(dá)到1.65 A,會(huì)導(dǎo)致電機(jī)運(yùn)行過(guò)程中溫升較大,在手術(shù)過(guò)程中對(duì)患者造成額外損傷。國(guó)家醫(yī)藥行業(yè)標(biāo)準(zhǔn)規(guī)定,在額定工作條件下,高速電動(dòng)手術(shù)工具可觸及的外殼表面溫度不應(yīng)超過(guò)環(huán)境溫度20 ℃[17]。因此,需要對(duì)電機(jī)進(jìn)行優(yōu)化,以提升手術(shù)過(guò)程安全性。
4 響應(yīng)曲面法優(yōu)化空載電流
4.1 影響因子分析
電機(jī)中轉(zhuǎn)子和定子之間的空氣隙大小對(duì)空載電流具有重要影響。較大的空氣隙會(huì)導(dǎo)致磁通泄漏,使有效磁通量減少,從而需要更多的電流來(lái)產(chǎn)生足夠的轉(zhuǎn)矩,使電機(jī)空載電流增加;而較小的空氣隙會(huì)使繞組磁場(chǎng)需要較大的電流來(lái)克服空氣隙的磁阻,導(dǎo)致較高的空載電流[18]。合適的空氣隙大小不僅可以降低電機(jī)的空載電流,還可以降低轉(zhuǎn)矩波動(dòng),減小電機(jī)振動(dòng)與噪聲。空氣隙大小由定子外徑和轉(zhuǎn)子外徑共同影響決定。
永磁體厚度直接關(guān)系電機(jī)磁路磁動(dòng)勢(shì)平衡問(wèn)題,其值增大時(shí),可產(chǎn)生更強(qiáng)的磁場(chǎng),有助于提高電機(jī)的轉(zhuǎn)矩輸出,電機(jī)在空載時(shí)所需的勵(lì)磁電流可能會(huì)減少,從而降低空載電流。但可能會(huì)使磁場(chǎng)過(guò)飽和,導(dǎo)致磁場(chǎng)增長(zhǎng)受限,使空載電流增加[19]。
4.2 響應(yīng)曲面試驗(yàn)
響應(yīng)曲面法在電機(jī)設(shè)計(jì)中具有效率高、可視化、多因素優(yōu)化響應(yīng)、解決非線性問(wèn)題和確定因素重要性等優(yōu)點(diǎn),可協(xié)助科研人員實(shí)現(xiàn)更高效、準(zhǔn)確的優(yōu)化設(shè)計(jì)工作[20]。本研究在保證電機(jī)外徑大小不變的情況下,選擇定子內(nèi)徑d、轉(zhuǎn)子外徑l、永磁體厚度h三個(gè)因素,通過(guò)響應(yīng)曲面法進(jìn)行優(yōu)化設(shè)計(jì),探尋最優(yōu)內(nèi)部尺寸。
通過(guò)單因素試驗(yàn),確定變量取值范圍為: 17 mm≤d≤18 mm,3.5 mm≤l≤4.5 mm,1.6 mm≤h≤1.8 mm,三個(gè)自變量用x1,x2,x3表示。由于電機(jī)響應(yīng)曲面模型試驗(yàn)區(qū)域接近響應(yīng)面的最優(yōu)區(qū)域,且考慮了交互效應(yīng)和二次效應(yīng),故采用典型的二變量二次多項(xiàng)式建立近似數(shù)學(xué)模型[21]:
(7)
式中,y為目標(biāo)函數(shù),xi為自變量,βi為xi的線性效應(yīng),βii為xi二次效應(yīng),βij為xixj之間的交互效應(yīng),ε為誤差。使用Design-Expert軟件進(jìn)行交互試驗(yàn)設(shè)計(jì),得到三變量之間的兩兩交互作用對(duì)空載電流影響的三維圖與等值線圖,見(jiàn)圖8—圖10。
由圖8—圖 10可知,永磁體厚度和轉(zhuǎn)子外徑對(duì)空載電流的變異影響較小,說(shuō)明在1 mm的厚度變化區(qū)間內(nèi),電機(jī)旋轉(zhuǎn)部分的磁通密度不會(huì)產(chǎn)生太大變化。而定子內(nèi)徑對(duì)空載電流的變異影響較為顯著,一方面是因?yàn)殡姍C(jī)的磁通路徑是從永磁體正極經(jīng)過(guò)空氣隙到達(dá)定子后,折返進(jìn)入永磁體負(fù)極,定子內(nèi)徑變化影響空氣隙大小,進(jìn)而影響空載電流;另一方面是由于電機(jī)繞組用環(huán)氧樹(shù)脂膠布置在定子內(nèi)部,定子內(nèi)徑改變時(shí),繞組位置也隨之改變,極易影響電機(jī)磁場(chǎng)磁路,進(jìn)而對(duì)電機(jī)的空載電流造成較大影響[22]。這驗(yàn)證了永磁無(wú)刷電機(jī)回歸模型的合理性。
4.3 優(yōu)化結(jié)果
在Design-Expert 軟件中對(duì)二階回歸模型進(jìn)行分析求解,求得二階回歸方程:
y=1.68-0.052x1+0.06x2-0.145 3x3-0.004x1x2+0.014 8x1x3-0.087 4x2x3-0.386 9x12-0.835 8x22+0.293 9x32
(8)
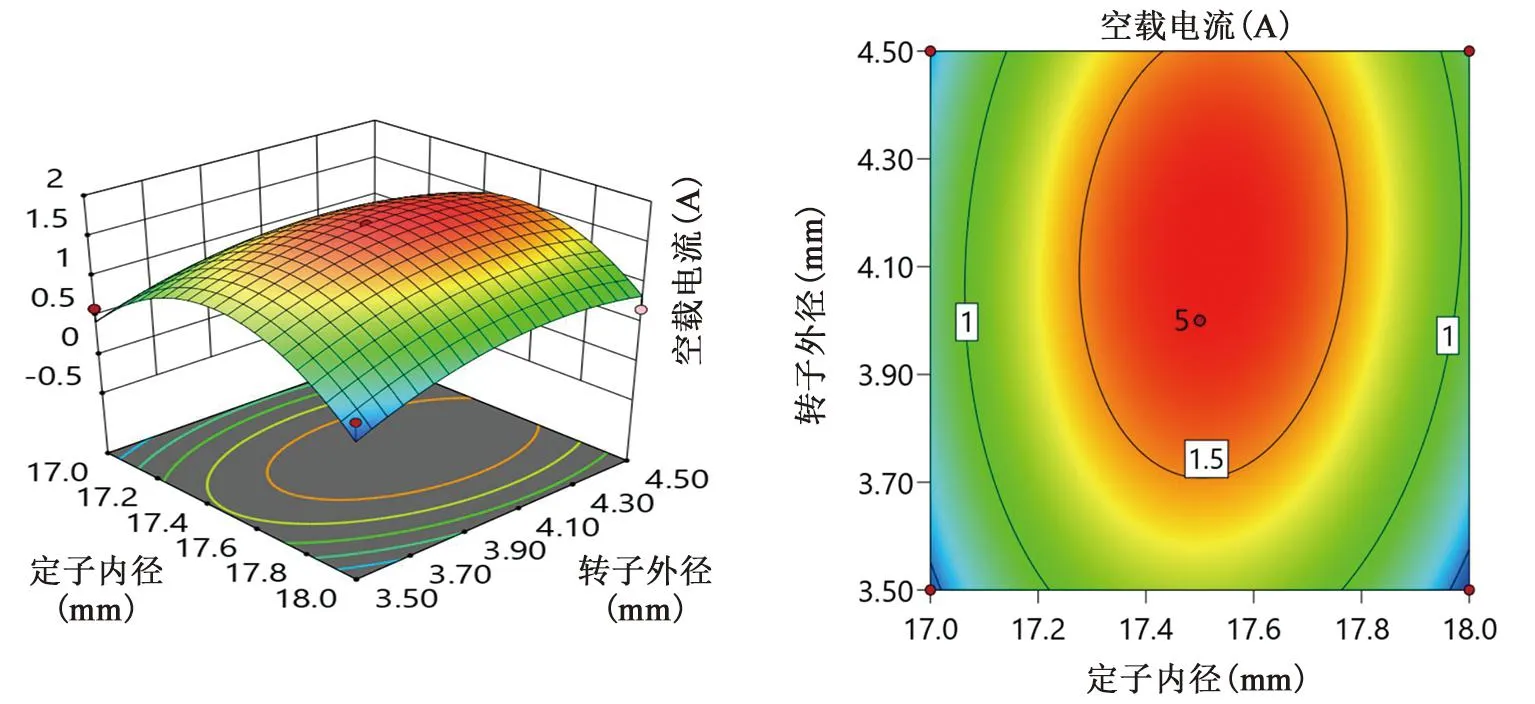
圖8 定子內(nèi)徑與轉(zhuǎn)子外徑交互影響Fig.8 Interaction between stator inner diameter and rotor outer diameter
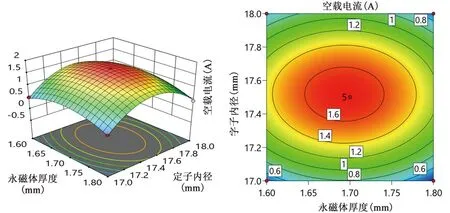
圖9 定子內(nèi)徑與永磁體厚度交互影響
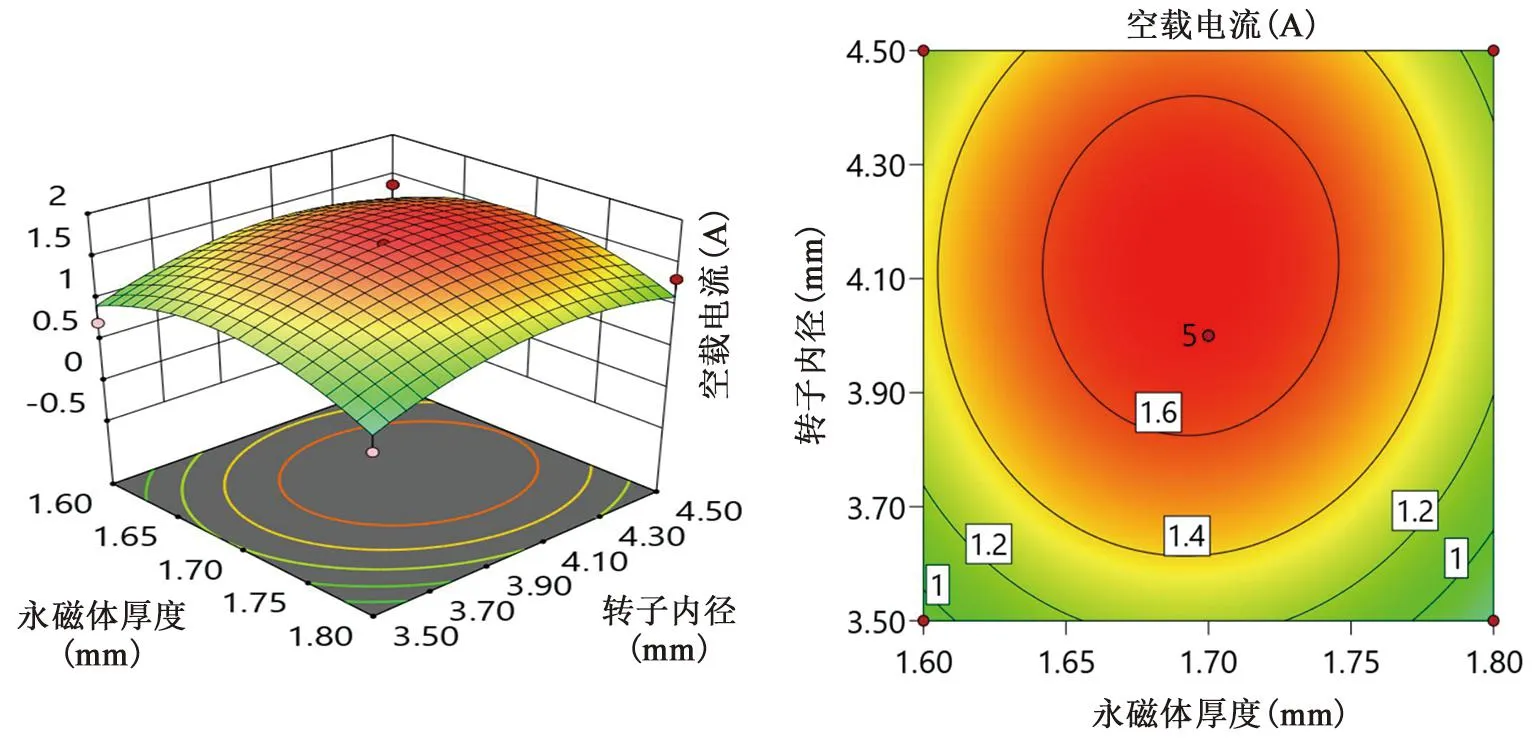
圖10 永磁體厚度與轉(zhuǎn)子外徑交互影響
由二階回歸方程計(jì)算得到響應(yīng)曲面法優(yōu)化的最優(yōu)結(jié)構(gòu)尺寸為:永磁體厚度1.63 mm,定子內(nèi)徑17.21 mm,轉(zhuǎn)子外徑4.41 mm,此時(shí)空載電流有效值降低至0.68 A,為最佳結(jié)構(gòu)設(shè)計(jì)方案。在Ansys Maxwell軟件中進(jìn)行仿真驗(yàn)證,優(yōu)化后的電機(jī)空載啟動(dòng)過(guò)程中的電流變化見(jiàn)圖11。電流相比優(yōu)化前降低了57.8%,使電機(jī)在手術(shù)運(yùn)行中的溫升顯著降低。
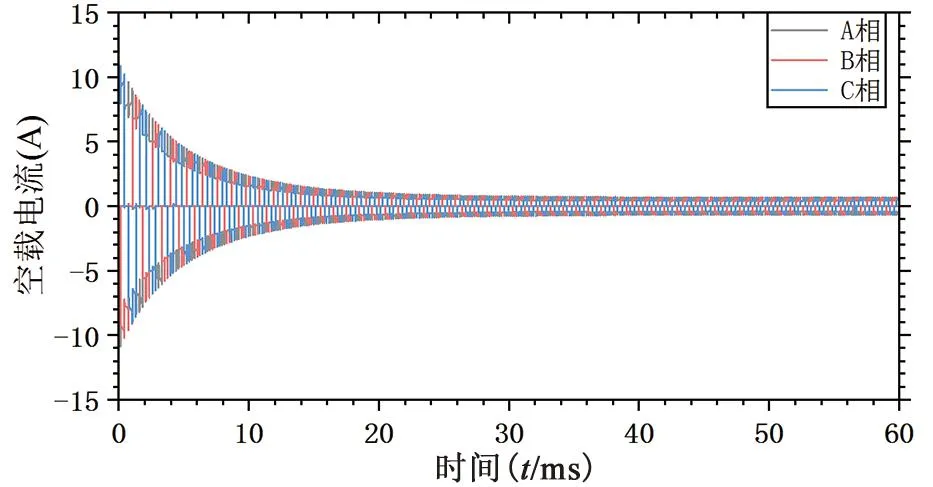
圖11 優(yōu)化后空載啟動(dòng)過(guò)程中的電流
5 結(jié)論
本研究通過(guò)分析高速電動(dòng)手術(shù)工具應(yīng)用場(chǎng)景與使用特性,設(shè)計(jì)了一款轉(zhuǎn)速為70 000 rpm的永磁無(wú)刷直流電機(jī)結(jié)構(gòu),并通過(guò)有限元仿真分析,驗(yàn)證了其性能。針對(duì)仿真中出現(xiàn)空載電流較大的問(wèn)題,采用響應(yīng)曲面法進(jìn)行優(yōu)化設(shè)計(jì),優(yōu)化后使電機(jī)空載電流降低了57.8%,電機(jī)的溫升性能得到有效改善,提升了可靠性與安全性,可為永磁無(wú)刷直流電機(jī)在高速電動(dòng)手術(shù)工具中的進(jìn)一步應(yīng)用提供參考。
猜你喜歡
環(huán)球時(shí)報(bào)(2022-12-23)2022-12-23 09:28:37
昆明醫(yī)科大學(xué)學(xué)報(bào)(2022年1期)2022-02-28 07:45:04
中老年保健(2021年11期)2021-08-22 03:13:36
昆明醫(yī)科大學(xué)學(xué)報(bào)(2021年2期)2021-03-29 07:42:46
河北畫(huà)報(bào)(2020年10期)2020-11-26 07:20:50
小學(xué)閱讀指南·低年級(jí)版(2017年1期)2017-03-13 20:07:35
中國(guó)衛(wèi)生標(biāo)準(zhǔn)管理(2015年3期)2016-01-14 03:41:47
中國(guó)醫(yī)療美容(2015年1期)2015-07-12 10:06:38
鄭州大學(xué)學(xué)報(bào)(醫(yī)學(xué)版)(2015年2期)2015-02-27 14:50:54
西南軍醫(yī)(2014年5期)2014-04-25 07:42:48
