基于復(fù)系數(shù)滑模觀(guān)測(cè)器的永磁同步電機(jī)位置估計(jì)誤差抑制
2024-01-18 01:51:10胡勤豐張芮嘉
電機(jī)與控制學(xué)報(bào) 2023年12期
關(guān)鍵詞:實(shí)驗(yàn)
胡勤豐, 張芮嘉
(南京航空航天大學(xué) 自動(dòng)化學(xué)院,江蘇 南京 211106)
0 引 言
永磁同步電機(jī)(permanent magnet synchromous motor,PMSM)因具有效率高、功率密度大、結(jié)構(gòu)簡(jiǎn)單、易于維護(hù)等特點(diǎn),被廣泛應(yīng)用于工業(yè)控制、航空航天、交通運(yùn)輸以及家用電器等領(lǐng)域[1-2]。眾所周知,轉(zhuǎn)子位置的精度直接影響PMSM矢量控制的性能,為了得到轉(zhuǎn)子的精確位置通常在電機(jī)轉(zhuǎn)子側(cè)同軸安裝位置傳感器。然而采用位置傳感器會(huì)帶來(lái)體積增大、成本增加、可靠性降低等問(wèn)題,尤其限制了其在惡劣環(huán)境下的應(yīng)用,因此無(wú)位置傳感器控制已成為近年來(lái)的研究熱點(diǎn)[3]。
目前PMSM的無(wú)位置傳感器控制方法可以根據(jù)適用轉(zhuǎn)速范圍分為兩類(lèi)。第一類(lèi)是基于電機(jī)凸極特性的高頻注入法,該方法適合零低速運(yùn)行階段,主要包括旋轉(zhuǎn)高頻注入法[4]、脈振高頻注入法[5]、高頻方波注入法[6]等;第二類(lèi)是基于反電動(dòng)勢(shì)或磁鏈的模型法,該方法適合中高速運(yùn)行階段,主要包括磁鏈估計(jì)法[7]、模型參考自適應(yīng)算法[8-9]、滑模觀(guān)測(cè)器(sliding mode observer,SMO)法、擴(kuò)展卡爾曼濾波器法[10]等。在中高速區(qū),基于滑模觀(guān)測(cè)器的位置估計(jì)方法因具有結(jié)構(gòu)簡(jiǎn)單、易于實(shí)現(xiàn)、對(duì)電機(jī)參數(shù)魯棒性強(qiáng)的優(yōu)勢(shì),得到了廣泛的應(yīng)用[11-12]。
基于滑模觀(guān)測(cè)器的位置估計(jì)誤差可分為諧波誤差和穩(wěn)態(tài)誤差。其中諧波誤差一方面是由滑模觀(guān)測(cè)器變結(jié)構(gòu)特性所引起的估計(jì)反電動(dòng)勢(shì)抖振導(dǎo)致的[13],另一方面是由磁鏈空間諧波、逆變器非線(xiàn)性[14]、電流采樣誤差[15]等因素導(dǎo)致的。諧波誤差引起的矢量控制坐標(biāo)變換不準(zhǔn)確會(huì)導(dǎo)致dq軸電流脈動(dòng)和轉(zhuǎn)矩脈動(dòng)。為了改善滑模觀(guān)測(cè)器引起的抖振問(wèn)題,通常采用sigmoid函數(shù)代替sign函數(shù),文獻(xiàn)[16]分析了sigmoid函數(shù)的平滑特性,有效改善了滑模觀(guān)測(cè)器引起的抖振問(wèn)題。在滑模觀(guān)測(cè)器趨近率方面,文獻(xiàn)[17]提出一種新型非線(xiàn)性趨近率并應(yīng)用于永磁同步電機(jī)滑模速度控制,該趨近率可以動(dòng)態(tài)地適應(yīng)滑模面和系統(tǒng)狀態(tài)的變化,保持滑模控制器動(dòng)態(tài)性能的同時(shí)有效抑制抖振。文獻(xiàn)[18-19]分別將超螺旋二階滑模和分?jǐn)?shù)階滑模應(yīng)用于永磁同步電機(jī)與感應(yīng)電機(jī)的無(wú)位置傳感器控制系統(tǒng)中,可以有效削弱抖振,且不影響觀(guān)測(cè)器魯棒性。為了提高諧波抑制能力,文獻(xiàn)[20]提出了一種基于飽和函數(shù)的誤差電壓補(bǔ)償方法,減小了由逆變器非線(xiàn)性導(dǎo)致的位置估計(jì)誤差脈動(dòng)。文獻(xiàn)[21]提出了一種帶自適應(yīng)陷波濾波器的鎖相環(huán),能夠有效抑制估計(jì)位置中的六次諧波誤差。文獻(xiàn)[22]將同步頻率提取濾波器引入位置估計(jì),并結(jié)合鎖頻環(huán)實(shí)現(xiàn)頻率跟蹤自適應(yīng),有效濾除了噪聲與各次諧波。
如上所述,位置估計(jì)諧波誤差有了很大的改善,但對(duì)于位置估計(jì)穩(wěn)態(tài)誤差的研究仍然不充分。位置估計(jì)穩(wěn)態(tài)誤差會(huì)使系統(tǒng)偏離最大轉(zhuǎn)矩電流比狀態(tài),降低系統(tǒng)帶載能力,因此對(duì)該穩(wěn)態(tài)誤差進(jìn)行抑制是十分必要的。滑模觀(guān)測(cè)器的位置估計(jì)穩(wěn)態(tài)誤差一方面由電機(jī)參數(shù)偏差導(dǎo)致,另一方面由低通濾波器、采樣延時(shí)等非理想環(huán)節(jié)導(dǎo)致。電機(jī)參數(shù)偏差在低轉(zhuǎn)速大負(fù)載時(shí)對(duì)估計(jì)位置的影響較為突出,文獻(xiàn)[23]采用遞推最小二乘法進(jìn)行參數(shù)辨識(shí),將辨識(shí)出的參數(shù)應(yīng)用于觀(guān)測(cè)器中,提高了位置估計(jì)的準(zhǔn)確性。文獻(xiàn)[24]提出一種雙重鎖相環(huán),對(duì)電流信號(hào)進(jìn)行延遲重構(gòu),有效補(bǔ)償了上述非理想環(huán)節(jié)造成的位置誤差。文獻(xiàn)[25]提出一種自適應(yīng)基準(zhǔn)鎖相環(huán),能夠同時(shí)補(bǔ)償電機(jī)參數(shù)偏差以及上述非理想環(huán)節(jié)導(dǎo)致的位置誤差,但動(dòng)態(tài)性能有待提升。目前,sigmoid函數(shù)已經(jīng)成為滑模觀(guān)測(cè)器中的常用開(kāi)關(guān)函數(shù)。采用sigmoid函數(shù)能夠有效抑制估計(jì)反電動(dòng)勢(shì)的抖振,雖然可以取消低通濾波器[16,26],卻仍然會(huì)引起估計(jì)反電動(dòng)勢(shì)滯后的問(wèn)題,進(jìn)而產(chǎn)生額外的位置估計(jì)穩(wěn)態(tài)誤差。文獻(xiàn)[27]對(duì)此展開(kāi)了分析,提出了基于位置估計(jì)誤差表達(dá)式的直接補(bǔ)償方法,提高了位置估計(jì)精度。然而該方法僅是對(duì)估計(jì)反電動(dòng)勢(shì)滯后引起的位置誤差進(jìn)行直接補(bǔ)償,沒(méi)有從根本上解決反電動(dòng)勢(shì)滯后的問(wèn)題,并且計(jì)算周期較長(zhǎng)。
針對(duì)上述問(wèn)題,本文在分析采用sigmoid函數(shù)的傳統(tǒng)滑模觀(guān)測(cè)器位置估計(jì)誤差產(chǎn)生機(jī)理的基礎(chǔ)上,提出一種復(fù)系數(shù)滑模觀(guān)測(cè)器(complex coefficient sliding mode observer,CC-SMO)。利用兩相靜止坐標(biāo)系的相位關(guān)系在傳統(tǒng)滑模觀(guān)測(cè)器中引入復(fù)系數(shù)電流誤差項(xiàng),解決估計(jì)反電動(dòng)勢(shì)相位滯后的缺陷,實(shí)現(xiàn)轉(zhuǎn)子位置的精確估計(jì),提高無(wú)位置傳感器系統(tǒng)控制性能。最后基于一臺(tái)表貼式永磁同步電機(jī)進(jìn)行實(shí)驗(yàn),驗(yàn)證所提出算法的有效性。
1 傳統(tǒng)滑模觀(guān)測(cè)器原理
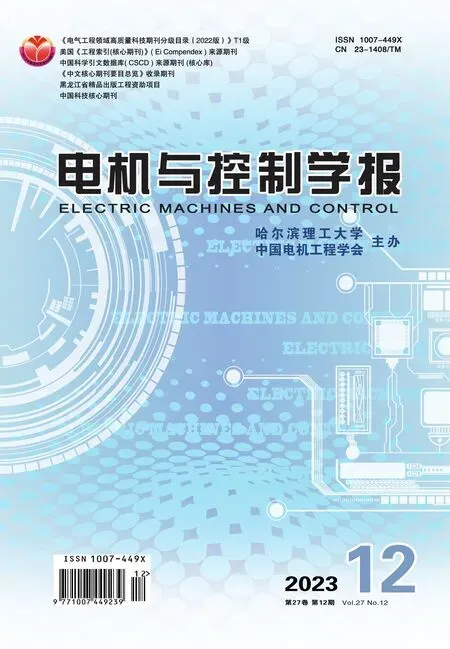
基于SMO和鎖相環(huán)(phase-locked loop,PLL)的PMSM無(wú)位置傳感器控制系統(tǒng)框圖如圖1所示。其中,SMO根據(jù)電壓和電流對(duì)反電動(dòng)勢(shì)進(jìn)行估計(jì),PLL用來(lái)跟蹤轉(zhuǎn)子位置。
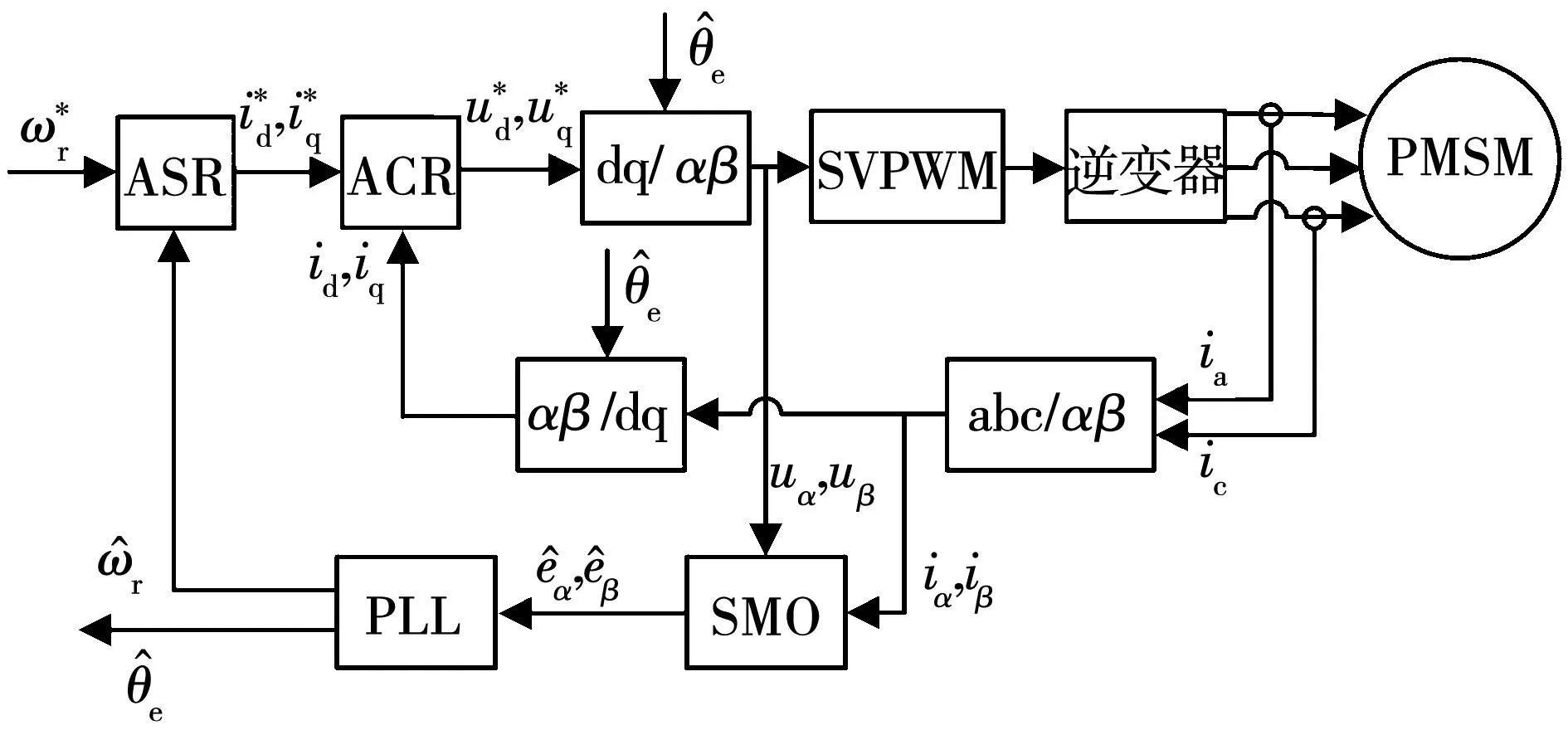
圖1 基于SMO的PMSM無(wú)位置傳感器控制系統(tǒng)框圖Fig.1 Diagram of PMSM sensorless control system based on SMO
1.1 表貼式永磁同步電機(jī)數(shù)學(xué)模型
表貼式PMSM在αβ參考坐標(biāo)系下的數(shù)學(xué)模型為:
(1)
式中:uα、uβ、iα、iβ和eα、eβ分別表示αβ軸的電壓、電流和反電動(dòng)勢(shì);R和L是電機(jī)定子繞組的電阻和電感。反電動(dòng)勢(shì)eα、eβ的表達(dá)式為:
(2)
式中:ψf、ωe和θe分別為永磁體磁鏈、電角速度和電角度。
1.2 基于傳統(tǒng)滑模觀(guān)測(cè)器的反電動(dòng)勢(shì)觀(guān)測(cè)
傳統(tǒng)滑模觀(guān)測(cè)器方程為:
(3)
式中:符號(hào)^表示估計(jì)值;Ks為滑模增益。其結(jié)構(gòu)框圖如圖2所示。
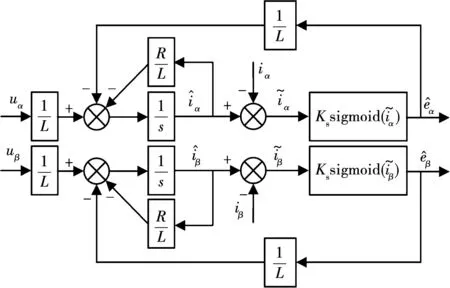
圖2 傳統(tǒng)SMO結(jié)構(gòu)框圖Fig.2 Diagram of traditional SMO
將式(3)和式(1)做差得到電流誤差方程為:
(4)
根據(jù)式(4)可得PMSM在兩相靜止坐標(biāo)系下的估計(jì)反電動(dòng)勢(shì):
(5)
2 估計(jì)反電動(dòng)勢(shì)相位誤差分析
sigmoid函數(shù)的示意圖如圖3所示。a為sigmoid函數(shù)的斜率系數(shù),δ為sigmoid函數(shù)的邊界層厚度。當(dāng)|x|>δ時(shí),sigmoid函數(shù)可以等效為sign函數(shù);當(dāng)|x|≤δ時(shí),sigmoid函數(shù)近似于線(xiàn)性函數(shù)。因此,將sigmoid函數(shù)等效為一個(gè)分段函數(shù)[28]:
(6)
圖3 sigmoid函數(shù)示意圖Fig.3 Schematic diagram of sigmoid function
(7)
(8)
(9)

(10)
(11)
根據(jù)式(11)可知,傳統(tǒng)滑模觀(guān)測(cè)器的估計(jì)反電動(dòng)勢(shì)存在幅值衰減和相位滯后。其相位滯后角Δθe為
(12)
在R=0.085 Ω,L=0.121 mH,Ks=49.88條件下,估計(jì)反電動(dòng)勢(shì)相位滯后角Δθe隨轉(zhuǎn)速n和參數(shù)a的變化關(guān)系如圖4所示。可以看出電機(jī)轉(zhuǎn)速越高、參數(shù)a越小,Δθe越大。一般來(lái)說(shuō),為了得到較為平滑的估計(jì)反電動(dòng)勢(shì)波形,需要選擇一個(gè)較小的a值,然而較小的a值將導(dǎo)致較大的Δθe。過(guò)大的Δθe可能導(dǎo)致系統(tǒng)不穩(wěn)定。
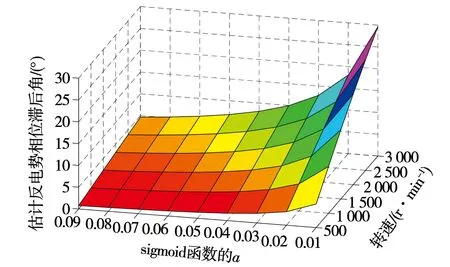
圖4 不同轉(zhuǎn)速與參數(shù)a下的反電動(dòng)勢(shì)相位滯后角Fig.4 Back-EMF phase lag angle under different speed and parameter a
鎖相環(huán)根據(jù)估計(jì)反電動(dòng)勢(shì)的相位關(guān)系跟隨轉(zhuǎn)子位置,估計(jì)反電動(dòng)勢(shì)與實(shí)際反電動(dòng)勢(shì)存在相位偏差,那么由此計(jì)算的轉(zhuǎn)子位置角度必然與實(shí)際轉(zhuǎn)子角度存在偏差。因此,保證反電動(dòng)勢(shì)無(wú)相位差估計(jì)對(duì)永磁同步電機(jī)無(wú)位置傳感器控制非常重要。
3 復(fù)系數(shù)滑模觀(guān)測(cè)器設(shè)計(jì)與分析
3.1 復(fù)系數(shù)滑模觀(guān)測(cè)器設(shè)計(jì)
由式(11)可知,傳統(tǒng)滑模觀(guān)測(cè)器的估計(jì)反電動(dòng)勢(shì)表達(dá)式中含有一個(gè)復(fù)數(shù)項(xiàng)jωeL。當(dāng)采用sign函數(shù)時(shí),滑模面附近的等效增益為+∞,即a等效為+∞,因此jωeL項(xiàng)造成的相位滯后趨近于0;而sigmoid函數(shù)在滑模面附近引入線(xiàn)性控制段,滑模面附近的等效增益a/2為一個(gè)有限常數(shù),所以jωeL項(xiàng)將造成不可忽略的估計(jì)反電動(dòng)勢(shì)相位滯后。因此,估計(jì)反電動(dòng)勢(shì)表達(dá)式中的復(fù)數(shù)項(xiàng)jωeL是產(chǎn)生相位滯后的根本原因。
基于上述分析,本文在傳統(tǒng)滑模觀(guān)測(cè)器中引入估計(jì)電流誤差的復(fù)系數(shù)項(xiàng),構(gòu)造一種復(fù)系數(shù)滑模觀(guān)測(cè)器:
(13)
根據(jù)iα=jiβ,該復(fù)系數(shù)電流誤差項(xiàng)可以等效為一個(gè)電流誤差交叉耦合項(xiàng)。復(fù)系數(shù)滑模觀(guān)測(cè)器的結(jié)構(gòu)框圖如圖5所示。
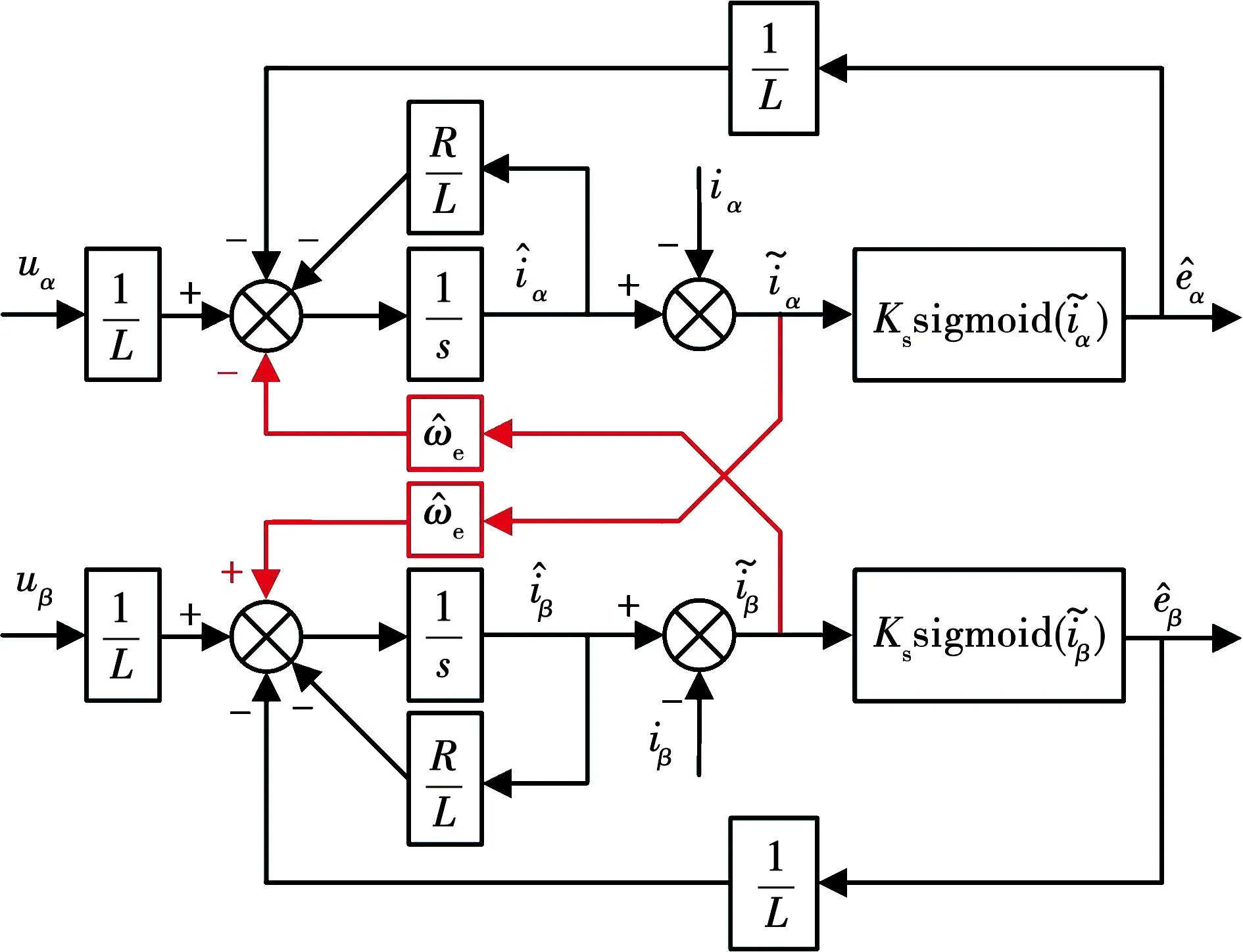
圖5 CC-SMO結(jié)構(gòu)框圖Fig.5 Diagram of CC-SMO
將式(13)和式(1)做差得到電流的動(dòng)態(tài)誤差:
(14)
穩(wěn)態(tài)時(shí),反電動(dòng)勢(shì)估計(jì)值與式(5)相同。
3.2 復(fù)系數(shù)滑模觀(guān)測(cè)器的估計(jì)反電動(dòng)勢(shì)分析
(15)
同理,構(gòu)造狀態(tài)變量x2,使x2的平衡點(diǎn)為0,即
(16)
將式(15)代入式(16),其狀態(tài)方程可以改寫(xiě)為
(17)
(18)
根據(jù)式(18),復(fù)系數(shù)滑模觀(guān)測(cè)器的估計(jì)反電動(dòng)勢(shì)的表達(dá)式中不再包含復(fù)數(shù)項(xiàng)jωeL,sigmoid函數(shù)中的線(xiàn)性段將不再造成估計(jì)反電動(dòng)勢(shì)相位滯后。
(19)
同理,狀態(tài)變量x3可構(gòu)造為
(20)
式(18)可以寫(xiě)為
(21)
此時(shí),復(fù)系數(shù)滑模觀(guān)測(cè)器得到的估計(jì)反電動(dòng)勢(shì)既無(wú)相位滯后也無(wú)幅值衰減,可以實(shí)現(xiàn)實(shí)際反電動(dòng)勢(shì)的精確估計(jì)。
3.3 復(fù)系數(shù)滑模觀(guān)測(cè)器穩(wěn)定條件分析

3.4 復(fù)系數(shù)滑模觀(guān)測(cè)器動(dòng)態(tài)性能分析
滑模觀(guān)測(cè)器的動(dòng)態(tài)性能影響電機(jī)在突加突卸負(fù)載、突加突減速時(shí)的轉(zhuǎn)速波動(dòng)與穩(wěn)定時(shí)間。滑模觀(guān)測(cè)器的動(dòng)態(tài)性能體現(xiàn)在滑模量的趨近速度,其動(dòng)態(tài)響應(yīng)過(guò)程可以分為兩個(gè)階段:非線(xiàn)性段和線(xiàn)性段。
當(dāng)滑模量在非線(xiàn)性段時(shí),傳統(tǒng)滑模觀(guān)測(cè)器與復(fù)系數(shù)滑模觀(guān)測(cè)器的動(dòng)態(tài)性能均由滑模增益Ks決定,Ks越大趨近速度越快,趨近時(shí)間越短,但觀(guān)測(cè)值抖振水平也相應(yīng)增加。
當(dāng)滑模量在線(xiàn)性段時(shí),傳統(tǒng)滑模觀(guān)測(cè)器的狀態(tài)方程式(10)的解為
(22)
可見(jiàn),此時(shí)動(dòng)態(tài)性能與a相關(guān),a越大,趨近速度越快。
同理,復(fù)系數(shù)滑模觀(guān)測(cè)器的狀態(tài)方程式(17)的解為
(23)
式(23)和式(22)的衰減項(xiàng)時(shí)間常數(shù)一致。因此,引入復(fù)系數(shù)項(xiàng)后并沒(méi)有影響觀(guān)測(cè)器的動(dòng)態(tài)性能。
4 實(shí)驗(yàn)驗(yàn)證
為了驗(yàn)證本文提出的復(fù)系數(shù)滑模觀(guān)測(cè)器的有效性,搭建了基于TMS320F28335的硬件實(shí)驗(yàn)平臺(tái),開(kāi)關(guān)頻率為10 kHz,如圖6所示。實(shí)驗(yàn)電機(jī)是一臺(tái)880 W/3 000 r·min-1的表貼式PMSM,其具體參數(shù)如表1所示。
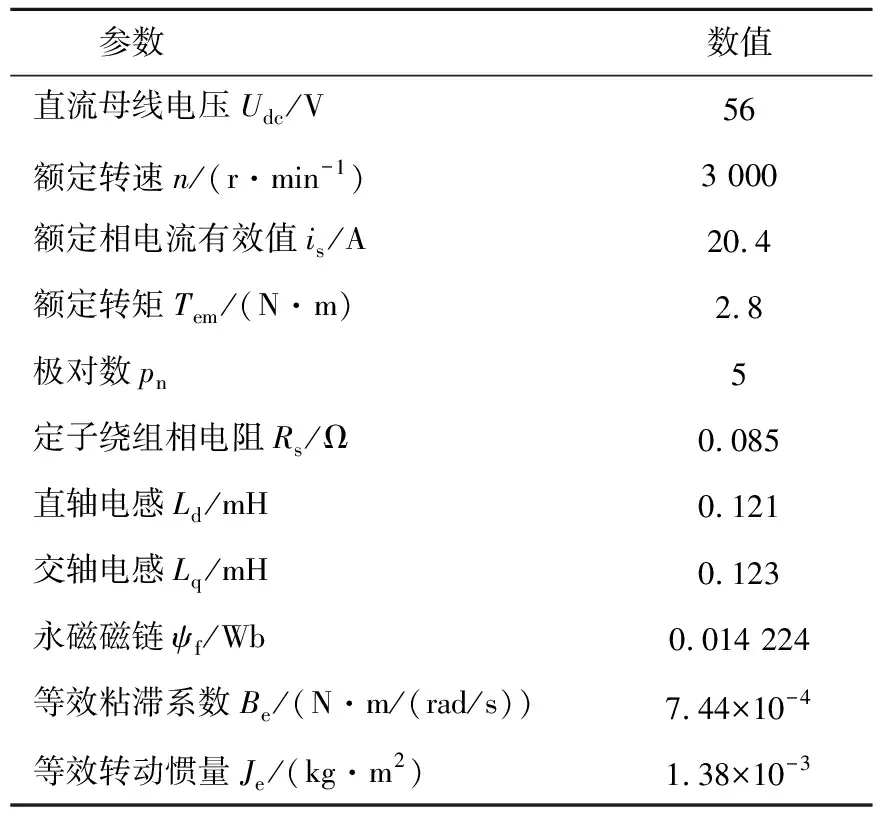
表1 PMSM參數(shù)Table 1 PMSM parameters
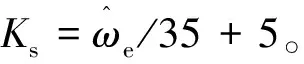
為了驗(yàn)證估計(jì)反電動(dòng)勢(shì)與實(shí)際反電動(dòng)勢(shì)的相位、幅值關(guān)系,給定電機(jī)額定轉(zhuǎn)速,在a值分別為0.09、0.04和0.01三種情況下進(jìn)行實(shí)驗(yàn)。實(shí)驗(yàn)結(jié)果如圖7、圖8所示。
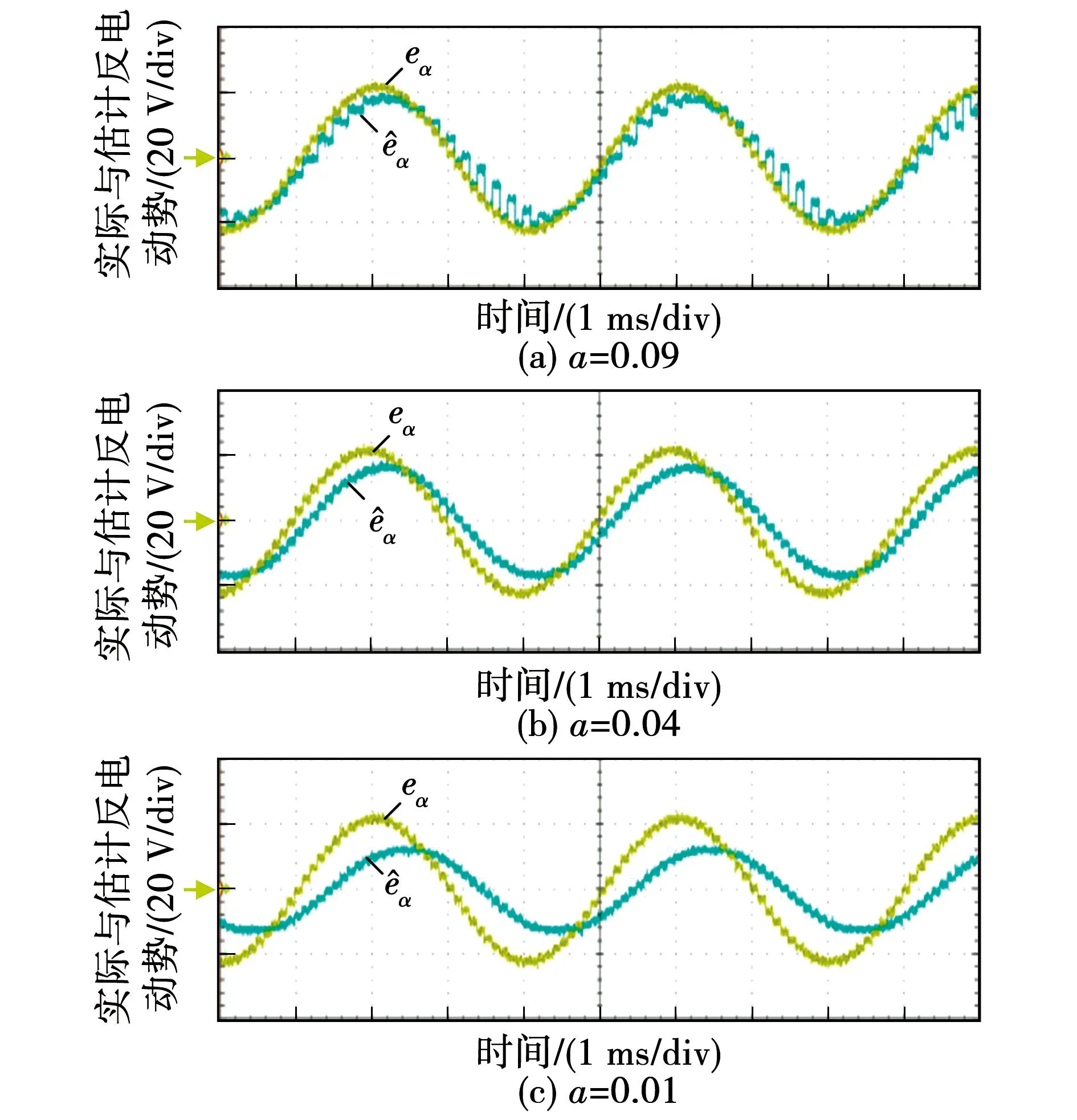
圖7 采用傳統(tǒng)SMO的反電動(dòng)勢(shì)實(shí)驗(yàn)結(jié)果Fig.7 Experimental results of back-EMF using traditional SMO
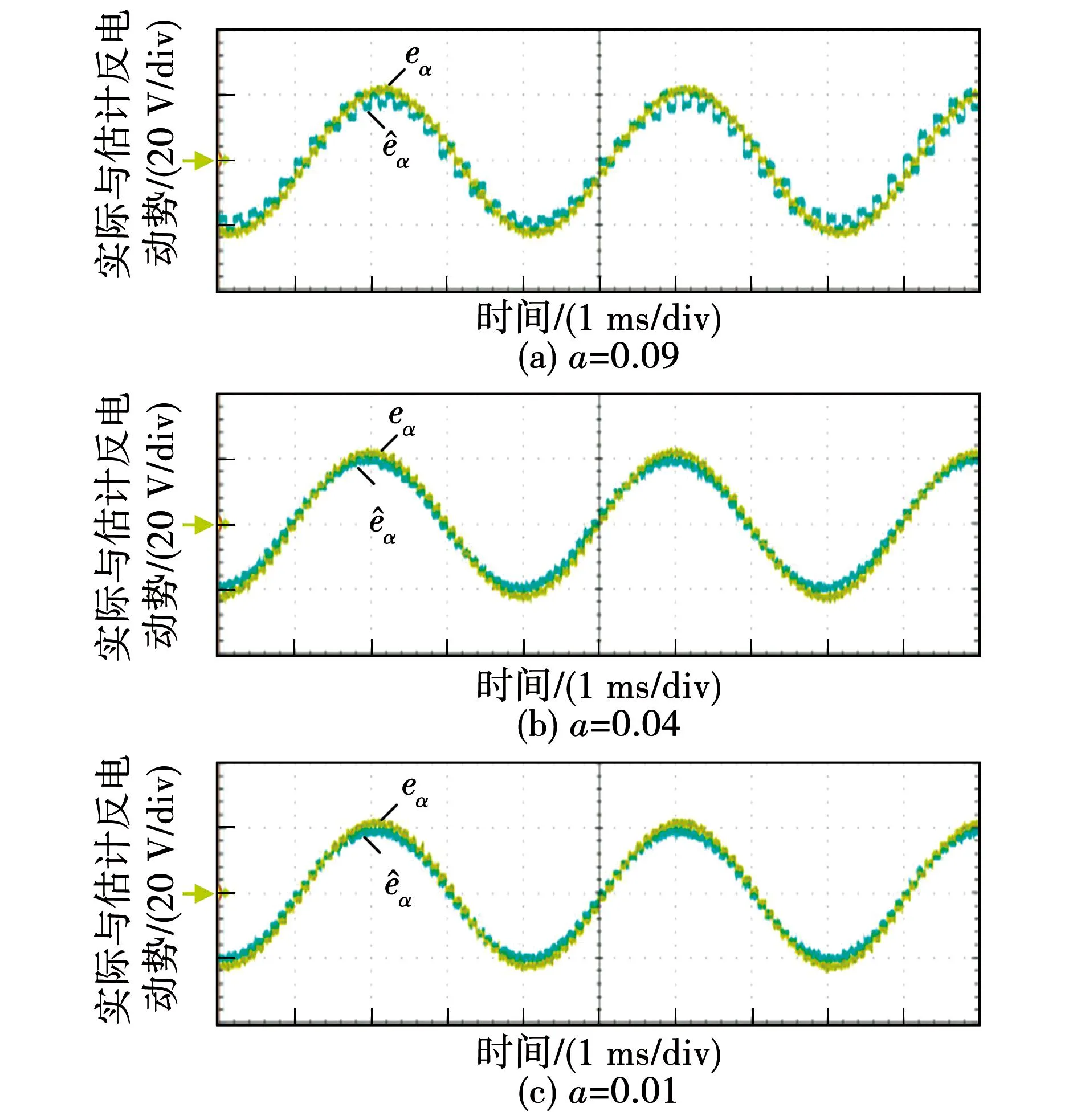
圖8 采用CC-SMO的反電動(dòng)勢(shì)實(shí)驗(yàn)結(jié)果Fig.8 Experimental results of back-EMF using CC-SMO
其中,圖7為采用傳統(tǒng)SMO的實(shí)際與估計(jì)反電動(dòng)勢(shì)實(shí)驗(yàn)結(jié)果,圖8為采用CC-SMO的實(shí)際與估計(jì)反電動(dòng)勢(shì)實(shí)驗(yàn)結(jié)果。可見(jiàn)a值越小估計(jì)反電動(dòng)勢(shì)越平滑。采用傳統(tǒng)SMO時(shí),估計(jì)反電動(dòng)勢(shì)存在幅值衰減和相位滯后,且a值越小這一現(xiàn)象越明顯。而采用CC-SMO在任意a值下都能實(shí)現(xiàn)反電動(dòng)勢(shì)的準(zhǔn)確觀(guān)測(cè)。
為了驗(yàn)證所提出的CC-SMO在不同a值和不同轉(zhuǎn)速下的位置估計(jì)誤差抑制效果,在空載工況下對(duì)傳統(tǒng)SMO和CC-SMO兩種算法進(jìn)行實(shí)驗(yàn)。實(shí)驗(yàn)結(jié)果如圖9、圖10所示。
圖9 不同a下的空載實(shí)驗(yàn)結(jié)果Fig.9 Experimental results under different a with no load condition
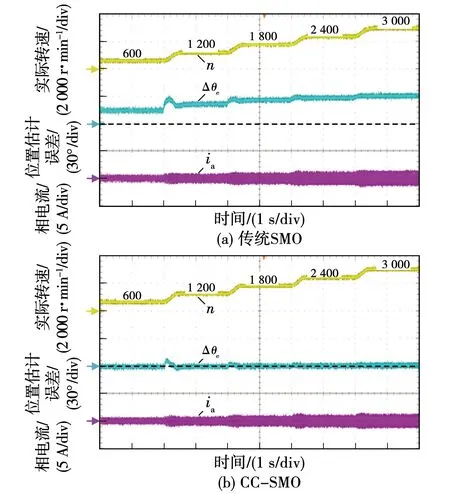
圖10 不同轉(zhuǎn)速下的空載實(shí)驗(yàn)結(jié)果Fig.10 Experimental results under different speeds with no load condition
其中,圖9為額定轉(zhuǎn)速下a從0.09逐步減小到0.01的實(shí)驗(yàn)結(jié)果,a每2 s減小0.02。圖10為a給定0.01,轉(zhuǎn)速?gòu)?00 r/min逐步增加到3 000 r/min(額定轉(zhuǎn)速)的實(shí)驗(yàn)結(jié)果,轉(zhuǎn)速每2 s斜坡增加600 r/min。由圖9(a)和圖10(a)可以看出,采用傳統(tǒng)SMO時(shí)估計(jì)位置存在穩(wěn)態(tài)誤差,a越小、轉(zhuǎn)速越高,位置估計(jì)誤差越大。轉(zhuǎn)速為3 000 r/min 、a=0.01時(shí)位置估計(jì)誤差達(dá)到30.3°。該實(shí)驗(yàn)結(jié)果與理論分析一致,驗(yàn)證了對(duì)位置估計(jì)誤差進(jìn)行抑制的必要性。由圖9(b)和圖10(b)可見(jiàn),采用本文提出的CC-SMO算法后,在不同a值與不同轉(zhuǎn)速下估計(jì)位置誤差均保持在2°電角度以?xún)?nèi)。該實(shí)驗(yàn)結(jié)果初步驗(yàn)證了本文提出的CC-SMO算法的有效性。
為了驗(yàn)證所提出的CC-SMO在帶載工況下的位置估計(jì)誤差抑制效果,在50%額定負(fù)載工況下對(duì)傳統(tǒng)SMO和CC-SMO兩種算法進(jìn)行實(shí)驗(yàn)。實(shí)驗(yàn)結(jié)果如圖11、圖12所示。

圖11 不同a下的帶載實(shí)驗(yàn)結(jié)果Fig.11 Experimental results under different a with load condition
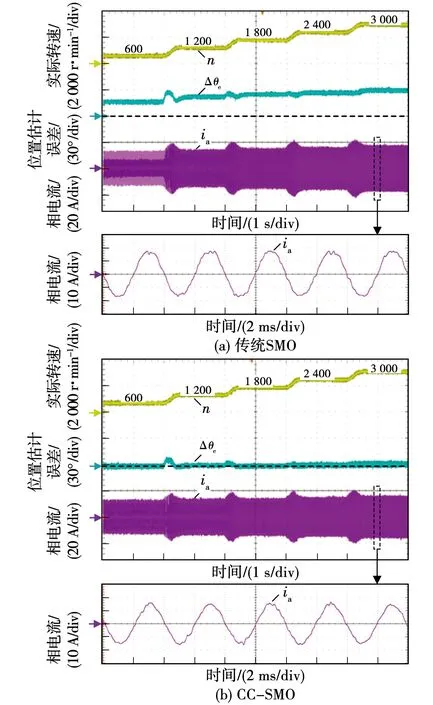
圖12 不同轉(zhuǎn)速下的帶載實(shí)驗(yàn)結(jié)果Fig.12 Experimental results at different speeds with load condition
同樣的,圖11為額定轉(zhuǎn)速下a從0.09逐步減小到0.01的實(shí)驗(yàn)結(jié)果,a每2 s減小0.02。圖12為a給定0.01,轉(zhuǎn)速?gòu)?00 r/min逐步增加到3 000 r/min(額定轉(zhuǎn)速)的實(shí)驗(yàn)結(jié)果,轉(zhuǎn)速每2 s斜坡增加600 r/min。可見(jiàn),在帶載工況下采用傳統(tǒng)SMO時(shí),隨著a值與轉(zhuǎn)速的變化,位置估計(jì)穩(wěn)態(tài)誤差與空載工況具有相同的變化趨勢(shì)。在帶載工況下采用本文提出的CC-SMO時(shí),仍然具有與空載工況相同的位置估計(jì)誤差抑制效果。由圖11(a)可知采用傳統(tǒng)SMO時(shí),隨著a減小,位置估計(jì)誤差增大,相電流幅值也隨之增大,a給定0.01時(shí),相電流達(dá)到18.4 A。由圖11(b)可知采用本文提出的CC-SMO時(shí),在不同a值下位置估計(jì)誤差依然能夠得到有效抑制,相電流幅值基本沒(méi)有變化,為16.2 A。可見(jiàn)a給定0.01時(shí),采用本文提出的CC-SMO后,相電流幅值減小了11.96%。該實(shí)驗(yàn)結(jié)果進(jìn)一步驗(yàn)證了本文提出的CC-SMO算法在帶載情況下的有效性。
為了驗(yàn)證所提出的CC-SMO的位置估計(jì)誤差收斂速度,在a分別為0.09、0.04和0.01三種情況下進(jìn)行了算法切入實(shí)驗(yàn)。CC-SMO算法切入瞬間的實(shí)驗(yàn)結(jié)果如圖13所示。
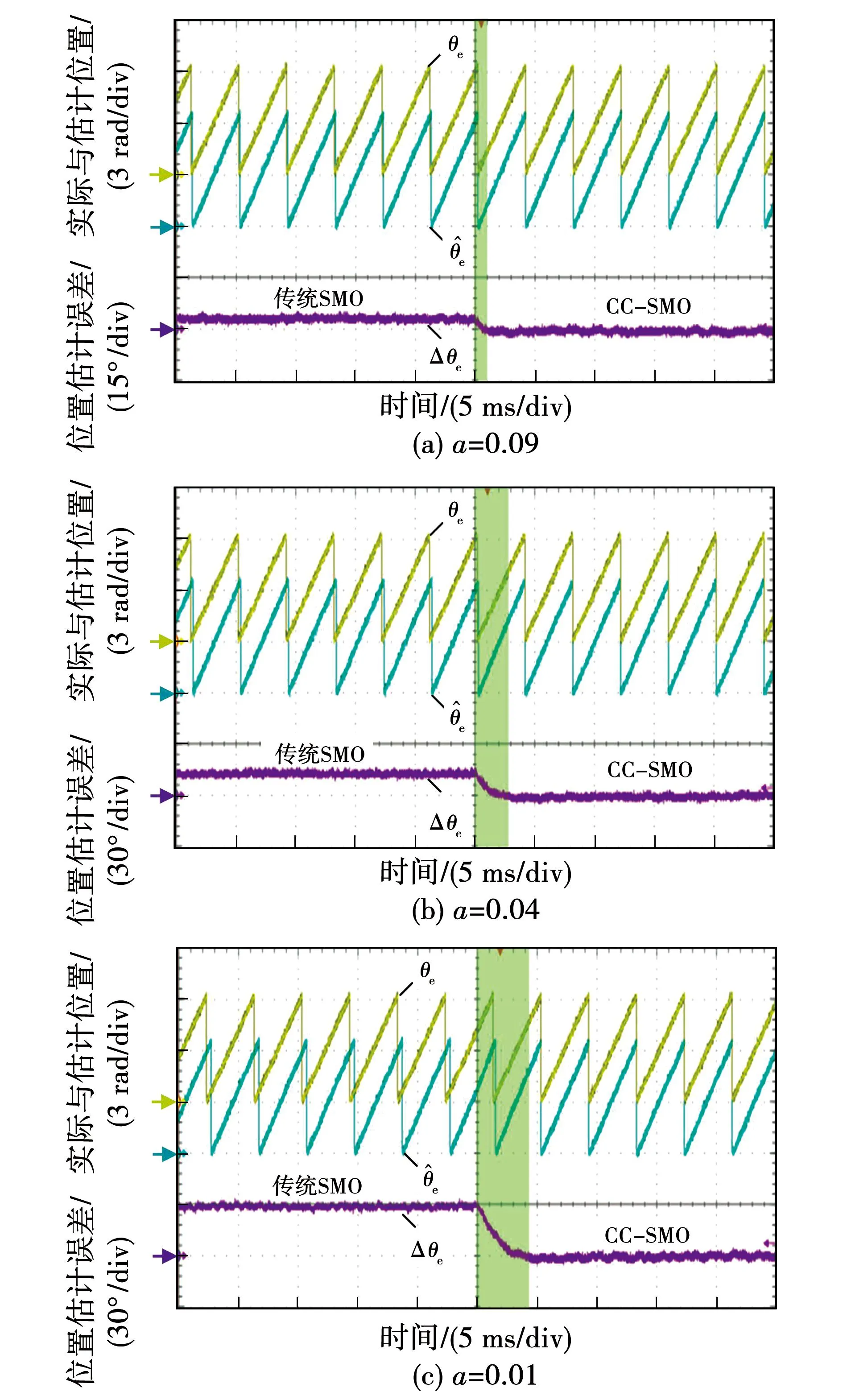
圖13 CC-SMO的收斂速度Fig.13 Convergence speed of CC-SMO
由圖13可以看出,CC-SMO算法切入前估計(jì)位置存在不同程度的相位滯后,而切入CC-SMO算法后,位置估計(jì)誤差快速收斂至0°附近。a越小、位置估計(jì)誤差越大,位置估計(jì)誤差的收斂時(shí)間越長(zhǎng),a給定0.01時(shí)收斂時(shí)間為4.33 ms。該實(shí)驗(yàn)結(jié)果驗(yàn)證了本文提出的CC-SMO算法在不同a值下均具有良好的收斂速度。
為了驗(yàn)證所提出的CC-SMO在動(dòng)態(tài)工況下的有效性,分別在突變轉(zhuǎn)速與突變負(fù)載工況下進(jìn)行實(shí)驗(yàn)。實(shí)驗(yàn)結(jié)果如圖14、圖15所示。
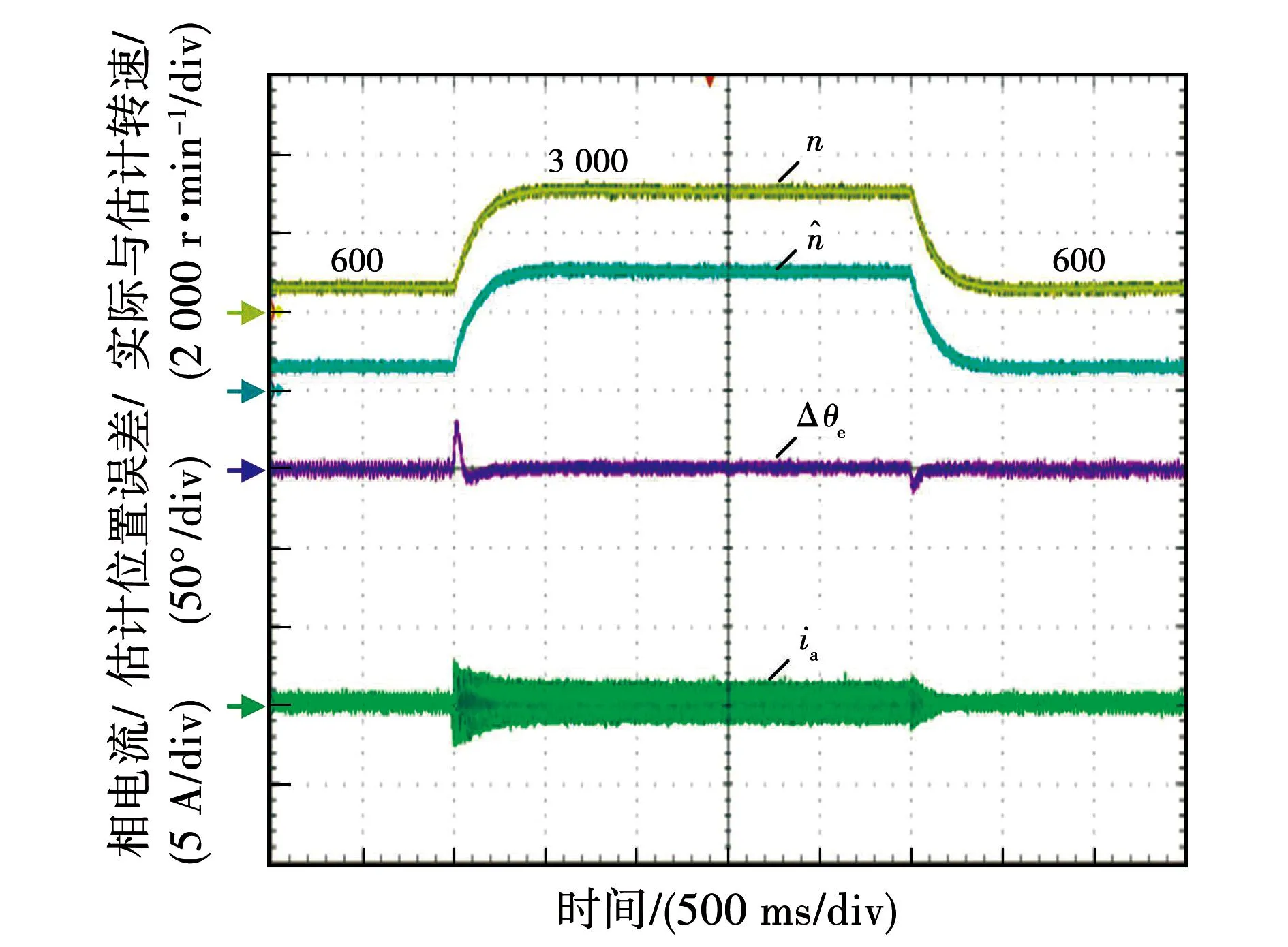
圖14 突加突減速動(dòng)態(tài)過(guò)程的實(shí)驗(yàn)結(jié)果Fig.14 Experimental results of dynamic process of sudden acceleration and sudden deceleration
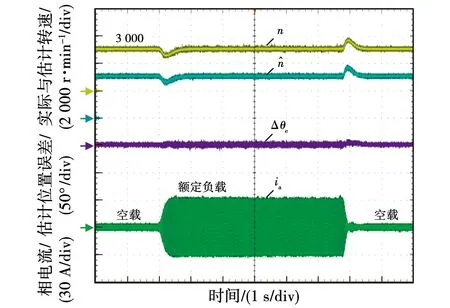
圖15 突加突卸載動(dòng)態(tài)過(guò)程的實(shí)驗(yàn)結(jié)果Fig.15 Experimental results of dynamic process of sudden loading and sudden unloading
其中,圖14為轉(zhuǎn)速?gòu)?00 r/min到3 000 r/min(額定轉(zhuǎn)速)再到600 r/min突加突減速動(dòng)態(tài)過(guò)程的實(shí)驗(yàn)結(jié)果。圖15給出了額定轉(zhuǎn)速下突加突卸100%額定負(fù)載的實(shí)驗(yàn)結(jié)果。可以看出在突加突減速和突加突卸負(fù)載的動(dòng)態(tài)工況下,估計(jì)轉(zhuǎn)速能夠準(zhǔn)確跟蹤實(shí)際轉(zhuǎn)速,位置估計(jì)誤差快速收斂至0附近,進(jìn)一步驗(yàn)證了本文所提出算法在突加突減速與突加突卸負(fù)載的動(dòng)態(tài)工況下均具有良好的性能。
為了分析所提出的CC-SMO對(duì)運(yùn)算時(shí)間的影響,分別對(duì)傳統(tǒng)SMO、本文提出的CC-SMO誤差抑制方案和根據(jù)式(12)的直接補(bǔ)償方案進(jìn)行實(shí)驗(yàn)測(cè)試。由于直接補(bǔ)償方案涉及反正切運(yùn)算與除法運(yùn)算,需要較長(zhǎng)的計(jì)算周期,而本文提出的CC-SMO僅通過(guò)加法與乘法實(shí)現(xiàn)。CC-SMO的運(yùn)算時(shí)間與傳統(tǒng)SMO相比增加了0.1 μs,而直接補(bǔ)償方案的運(yùn)算時(shí)間與傳統(tǒng)SMO相比增加了1.75 μs,采用CC-SMO與直接補(bǔ)償方案相比運(yùn)算時(shí)間減少了12.17%。
綜上所述,本文進(jìn)行了較為全面的實(shí)驗(yàn)對(duì)比,有效驗(yàn)證了對(duì)位置估計(jì)誤差進(jìn)行抑制的必要性以及本文提出的CC-SMO在不同工況下的有效性。
5 結(jié) 論
本文分析了采用sigmoid函數(shù)的傳統(tǒng)滑模觀(guān)測(cè)器的估計(jì)反電動(dòng)勢(shì)相位滯后原因,在此基礎(chǔ)上構(gòu)造了一種復(fù)系數(shù)滑模觀(guān)測(cè)器。通過(guò)引入復(fù)系數(shù)電流誤差項(xiàng),抑制了位置估計(jì)誤差。根據(jù)理論分析和實(shí)驗(yàn)結(jié)果得出以下結(jié)論:
1)傳統(tǒng)滑模觀(guān)測(cè)器的相位滯后由估計(jì)反電動(dòng)勢(shì)表達(dá)式中的復(fù)數(shù)項(xiàng)導(dǎo)致,轉(zhuǎn)速越高、a越小,估計(jì)反電動(dòng)勢(shì)的相位滯后角越大;
2)復(fù)系數(shù)滑模觀(guān)測(cè)器能夠消除估計(jì)反電動(dòng)勢(shì)的相位滯后,在不同轉(zhuǎn)速和a值的情況下將位置估計(jì)誤差抑制到2°電角度以?xún)?nèi),提高了轉(zhuǎn)子位置的估計(jì)精度,算法收斂時(shí)間在5 ms以?xún)?nèi),并且沒(méi)有影響觀(guān)測(cè)器的穩(wěn)定條件與動(dòng)態(tài)性能;
3)復(fù)系數(shù)滑模觀(guān)測(cè)器沒(méi)有引入額外參數(shù)、結(jié)構(gòu)簡(jiǎn)單,與直接補(bǔ)償方法相比運(yùn)算時(shí)間減少了12.17%。
猜你喜歡
作文·小學(xué)低年級(jí)(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂(lè)作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(jí)(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(jí)(2023年3期)2023-04-29 00:00:00
小獼猴智力畫(huà)刊(2022年9期)2022-11-04 02:31:42
小主人報(bào)(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55