雙三相永磁同步電機驅(qū)動系統(tǒng)簡易容錯控制方法研究
2024-01-18 01:52:38石鵬川王學慶賀明智毛耀王政
電機與控制學報 2023年12期
關(guān)鍵詞:故障
石鵬川, 王學慶, 賀明智, 毛耀, 王政
(1.四川大學 電氣工程學院,四川 成都 610065; 2.中國科學院 光電技術(shù)研究所,四川 成都 610209; 3.中國科學院 光束控制重點實驗室,四川 成都 610209; 4.東南大學 電氣工程學院,江蘇 南京 210096)
0 引 言
近年來,多相電機驅(qū)動在工業(yè)界中得到越來越廣泛的關(guān)注,尤其適合大功率高可靠性的應(yīng)用場合,例如電梯、航空航天、電動汽車和艦船推進等應(yīng)用領(lǐng)域[1-4]。和傳統(tǒng)的三相電機比較,多相電機具有低轉(zhuǎn)矩脈動、大功率、高可靠性和容錯能力強等優(yōu)點[5-7]。由于雙三相電機通過兩套三相繞組可以消除六次轉(zhuǎn)矩脈動[8],在眾多多相電機中優(yōu)勢明顯。
與三相電機相比,多相電機具有更多的冗余相數(shù),因而具有更強的容錯能力。通常可轉(zhuǎn)換電力電子變換器的短路故障為開路故障,因而電機驅(qū)動中的開路故障研究甚為廣泛[9]。傳統(tǒng)意義上,為獲得等效旋轉(zhuǎn)磁動勢,對于電機驅(qū)動的缺相故障需要更改調(diào)制方案、容錯參考電流和整體的控制框架等。文獻[10]把缺相故障的六相電機重構(gòu)成五相電機,基于新的五相電機模型和新的空間矢量圖實現(xiàn)電機的容錯控制。文獻[11]將五相電機缺相故障下新構(gòu)建電壓空間矢量用作模型預(yù)測控制的候選矢量并配合容錯電流參考值來實現(xiàn)缺相故障容錯控制。在多相電機驅(qū)動開關(guān)管的開路故障容錯控制方面,該類故障通常直接看作缺相故障進行容錯[12]。然而,該方案無法充分利用故障橋臂相的剩余健康開關(guān)管,因而沒充分利用多相電機驅(qū)動系統(tǒng)的容錯性能。
傳統(tǒng)的電機容錯控制方法為電機的容錯控制奠定了基礎(chǔ),提供了許多切實可行的解決方案,然而依然存在一些問題有待解決。例如,多相電機的傳統(tǒng)容錯控制策略通常需要改變電機模型、調(diào)制策略和控制框架,使容錯控制復(fù)雜度增加,進一步增加容錯控制的計算量,降低了直流側(cè)直流電壓的利用率,同時在電機容錯過渡過程中易造成系統(tǒng)的不穩(wěn)定。為了解決傳統(tǒng)多相電機驅(qū)動系統(tǒng)容錯控制方法存在的問題,本文針對多相電機驅(qū)動系統(tǒng)開路故障提出基于虛擬健全系統(tǒng)思路的簡易容錯控制方法,簡化系統(tǒng)設(shè)計,降低容錯控制復(fù)雜度。提出的容錯控制方法同樣適用于其他相數(shù)的多相電機驅(qū)動系統(tǒng)。
1 雙三相電機數(shù)學模型
1.1 六相靜止坐標系數(shù)學模型
圖1所示為兩電平雙三相永磁同步電機驅(qū)動系統(tǒng)結(jié)構(gòu)圖,兩套三相繞組空間互差30°,中性點相互隔離。

圖1 兩電平雙三相永磁同步電機驅(qū)動系統(tǒng)結(jié)構(gòu)圖Fig.1 Configuration of two-level inverter-fed dual three-phase PMSM drive
忽略磁飽和,漏電感和鐵耗影響,并將電機繞組看作正弦均勻分布,以簡化雙三相永磁同步電機的數(shù)學模型。雙三相永磁同步電機六相靜止坐標系下的電壓方程和磁鏈方程可表示如下:
(1)
其中:us為定子電壓矢量;is為定子電流矢量;ψs為定子磁通矢量;Ls為定子電感矢量;ψf為永磁鐵(轉(zhuǎn)子)磁通峰值;θe為轉(zhuǎn)子的電角度。位置函數(shù)為:
(2)
1.2 矢量空間解耦矩陣
雙三相永磁同步電機是一個高階非線性強耦合系統(tǒng),上述特征使分析和控制變得較為復(fù)雜。通過運用空間矢量解耦(vector space decomposition,VSD)方法[13],雙三相永磁同步電機的數(shù)學模型可解耦為3個兩兩正交的坐標系:α-β,x-y,o1-o2。α-β平面下的分量參與電機的機電能量轉(zhuǎn)換,因此α-β平面也稱作轉(zhuǎn)矩平面;x-y平面下的分量不參與機電能量轉(zhuǎn)換,但產(chǎn)生額外諧波損耗,因此x-y平面稱為諧波平面;o1-o2平面對應(yīng)零序分量。雙三相永磁同步電機空間矢量解耦矩陣如下:
(3)
1.3 同步旋轉(zhuǎn)坐標系數(shù)學模型
中性點隔離的雙三相永磁同步電機中ABC三相線性相關(guān)(iA+iC+iB=0),DEF三相線性相關(guān)(iD+iE+iF=0),故驅(qū)動系統(tǒng)的電流控制維度是四維。從空間矢量解耦矩陣角度理解,中性點隔離的雙三相永磁同步電機不存在零序分量,剩余α-β-x-y四維控制變量。通過將雙三相電機模型α-β坐標系轉(zhuǎn)換到d-q同步旋轉(zhuǎn)坐標系,可進一步簡化雙三相電機數(shù)學模型。雙三相電機同步旋轉(zhuǎn)變換矩陣為
(4)
聯(lián)立式(1)~式(4),可以得到中性點隔離的雙三相永磁同步電機旋轉(zhuǎn)坐標系下解耦的電壓方程和磁鏈方程:
(5)
(6)
式中:Ld和Lq分別為d軸和q軸電感;Lls為定子漏電感。
雙三相電機電磁轉(zhuǎn)矩方程可表示為
Te=3np(ψfiq+(Ld-Lq)idiq)。
(7)
2 簡易容錯控制
2.1 虛擬健全系統(tǒng)
傳統(tǒng)雙三相電機缺相故障容錯控制方法通常將故障電機看作非常規(guī)的五相電機,如圖2(a)所示。因此,該類方法通常需要構(gòu)造新電機的數(shù)學模型、解耦控制和空間矢量圖。本文提出的虛擬健全雙三相電機,將缺相故障下的雙三相電機看作一個虛擬健全的雙三相電機,如圖2(b)所示。新增的約束條件為故障相的參考電流為零。雙三相電機采用虛擬健全容錯思路,無須改變故障電機的數(shù)學模型、控制框架和調(diào)制策略,大幅簡化了容錯控制系統(tǒng)的設(shè)計,為雙三相電機容錯控制提供了一種新的思路。

圖2 雙三相缺相故障Fig.2 Open-phase fault in dual three-phase PMSM


圖3 開關(guān)管開路故障(正常)電流流通路徑Fig.3 Current path under normal state and different fault states
綜上所述,虛擬健全系統(tǒng)的核心在于將故障下的雙三相電機驅(qū)動系統(tǒng)看作虛擬健全的雙三相電機驅(qū)動,僅增加電流約束,不更改系統(tǒng)模型。
2.2 基于電流補償?shù)娜蒎e參考電流優(yōu)化方法
雙三相電機容錯控制的基本目標為消除故障帶來的轉(zhuǎn)矩波動。本文通過電流補償?shù)姆绞浇⒌刃D(zhuǎn)磁動勢以實現(xiàn)容錯運行下的平穩(wěn)轉(zhuǎn)矩輸出。雙三相電機ABC三相電流和DEF三相電流分別進行Clark變換到α1-β1和α2-β2坐標系,可表示為
(8)
基于式(3)、式(4)、式(8)可以得到正常運行下(id=0,ix=0,iy=0)雙三相電機q軸電流和雙坐標系下電流的關(guān)系:
(9)

(10)
根據(jù)式(10)可以畫出不同相缺故障下雙三相電機的雙α-β坐標系參考電流軌跡,如圖4所示。圖中綠色軌跡代表正常運行下的參考電流。紅色軌跡FT-A代表A相缺相故障容錯參考電流軌跡。FT-B至FT-F分別代表其他相的缺相故障下的容錯參考電流軌跡。從圖4中可以看出,通過采用健全三相繞組對故障三相繞組的缺失電流進行補償即可建立等效的旋轉(zhuǎn)磁動勢,實現(xiàn)缺相故障基于電流補償容錯控制。

圖4 雙α-β坐系不同缺相故障基于電流補償?shù)娜蒎e參考電流軌跡Fig.4 Current compensation based fault-tolerant current reference trajectories of double α-β coordinate at different open-phase fault
結(jié)合式(3)和式(8)分別進行逆變換,可得雙坐標系和解耦坐標系下的變換矩陣:
(11)
結(jié)合式(4)、式(10)、式(11)可得到x-y平面的參考電流:
(12)
對于變換器A相橋臂S1開關(guān)管開路故障,同樣采用上述分析方法,可以得到容錯下的x-y平面的參考電流如下:
(3)
變換器A相橋臂S1開關(guān)管開路故障基于電流補償容錯控制下的雙坐標系參考電流軌跡如圖5所示。通過對比式(12)和式(13)可知,采用提出的開關(guān)管開路故障基于電流補償容錯控制方法可進一步降低電機銅耗,提升轉(zhuǎn)矩輸出能力。

圖5 雙α-β 坐標系A(chǔ)相S1開關(guān)管開路故障基于電流補償容錯參考電流軌跡Fig.5 Current compensation based fault-tolerant current reference trajectories of double α-β coordinate under S1 open-switch fault in Phase-A
2.3 基于最小銅耗的容錯參考電流優(yōu)化方法
雙三相電機容錯控制的目標除了平穩(wěn)轉(zhuǎn)矩,還可以降低繞組銅耗。雙三相電機繞組總銅耗為
(14)
因電機各相繞組均勻分布,故各相繞組電阻均為R,T為基波電流周期。同樣以A相缺相故障(iA=0) 為例,來分析容錯控制下的參考電流。為簡化分析對參考值進行標幺化,以iq為基值,故iq(pu)=1, 由式(12), 可得A缺相故障iy=0, 再聯(lián)合式(3)的逆變換和式(14),可得到僅由id的表達的銅耗為
(15)
以式(15)中PCu最小為優(yōu)化目標,通過優(yōu)化id電流波形,可得到雙三相電機故障下繞組總銅耗最小的參考電流,具體優(yōu)化分析如下。f(id)滿足式(16),即對每個θe,存在id使f(id)最小。
?θe∈(0,2π),?id∈(-1,1)?minf(id)。
(16)
如果滿足每個θe的最小f(id),則PCu必然最小。把(0,2π)區(qū)間n-1等分,橫坐標對應(yīng)θk(k=1,2,…,n),對每一個θk(常數(shù)),f(id)僅僅是關(guān)于id表達式,id從-1開始到1結(jié)束,每次增加一個較小的偏移量δ,如果f(id)變小更新idk。通過在區(qū)間(-1,1)遍歷搜索,求出f(id)最小值對應(yīng)的idk。即可求出最小銅耗下全局最優(yōu)的id離散曲線。再根據(jù)數(shù)據(jù)點(θk,idk),進行曲線擬合,可得到近似的最小銅耗id表達式。A相缺相故障最小銅耗下的容錯參考電流如下:
(17)
從圖6可知,擬合的最小銅耗表達式的曲線幾乎和離散的最小銅耗離散數(shù)據(jù)點重合。本研究以隱極式永磁同步電機為研究對象,故d軸電感Ld和q軸電感Lq相等。根據(jù)式(7)可知轉(zhuǎn)矩Te=3neψfiq,因此在隱極式電機中id不影響轉(zhuǎn)矩的波動,轉(zhuǎn)矩由iq決定,而id的變化僅影響銅耗。通過優(yōu)化電流id波形來實現(xiàn)定子繞組總銅耗最小,同時保持iq為恒定值,便可實現(xiàn)雙三相電機轉(zhuǎn)矩平穩(wěn)運行。對于A相橋臂S1開關(guān)管開路故障最小銅耗容錯控制參考電流優(yōu)化方法,可參照開關(guān)管開路故障基于電流補償容錯控制下的參考電流優(yōu)化方法相同思路進行設(shè)計,此處不再贅述。
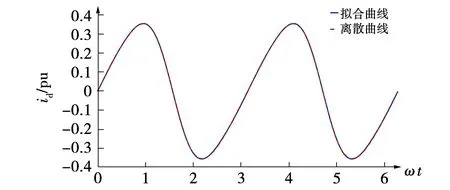
圖6 最小銅耗下的離散曲線和擬合曲線Fig.6 Discrete curve and fitting curve with minimum-copper-loss constraint
2.4 非常規(guī)電流控制器
容錯運行下的非常規(guī)參考電流對電流控制提出了更高的要求。傳統(tǒng)的PI控制器,能有效跟蹤直流信號,對非常規(guī)的容錯電流無能為力。無差拍控制器能較好地跟蹤非常規(guī)電流,但是依賴控制系統(tǒng)數(shù)學模型。滯環(huán)控制器具有較快的響應(yīng)速度,但是控制精度較低,對采樣時間有較高的要求。為了對周期性輸入信號進行高精度的有效跟蹤,日本學者Inoue等人首次提出了重復(fù)控制[14]。除此之外,重復(fù)控制能有效地抑制干擾信號,且不依賴控制系統(tǒng)數(shù)學模型。因此重復(fù)控制非常適合雙三相電機系統(tǒng)容錯運行的周期性非常規(guī)電流跟蹤。本文采用改進型重復(fù)控制如圖7所示,其中:W(s)為低通濾波器;τd為跟蹤周期電流的周期;Gc(s)為動態(tài)補償器也稱為穩(wěn)態(tài)補償器。

圖7 重復(fù)控制器Fig.7 Repetitive controller
重復(fù)控制器的核心主要是內(nèi)模模型的應(yīng)用[15],內(nèi)模模型的零極圖如圖8所示[16]。內(nèi)模模型在虛軸上的零點jkωτd(k=0,±1,±2,±3,…)正好可以對消跟蹤的周期信號的極點。因此對角頻率為ωτd或ωτd角頻率的倍頻周期信號都能進行有效的無靜差跟蹤。那么對于式(17)中的最小銅耗下的容錯參考電流可實現(xiàn)有效跟蹤。實際重復(fù)控制的作用效果和無窮多個比例諧振控制器(諧振頻率jkωτd;k=0,±1,±2,±3,…)并聯(lián)的效果類似,但只需要一個控制器便可實現(xiàn)多個頻率信號的有效跟蹤。

圖8 內(nèi)模模型零極圖Fig.8 Zero-pole plot of the internal model
2.5 統(tǒng)一容錯控制架構(gòu)


圖9 雙三相PMSM容錯統(tǒng)一控制框架Fig.9 Universal fault-tolerant control framework of dual three-phase PMSM drive
3 實驗結(jié)果
為了驗證提出容錯控制方法的有效性,分別對雙三相永磁同步電機驅(qū)動系統(tǒng)缺相故障和開關(guān)管開路故障下的基于電流補償容錯控制和最小銅耗容錯控制進行實驗驗證,實驗測試平臺如圖10所示,其中實驗參數(shù)如表1所示。

表1 實驗參數(shù)Table 1 Experimental parameters
圖11為A相缺相故障下基于電流補償容錯控制實驗波形。圖11(a)中,A相缺相故障導(dǎo)致A相電流為0,在電流閉環(huán)控制下其他相電流都有較高的正弦度。由DEF相繞組電流補償,DE相的電流大于B相電流,和前述的理論分析一致。圖11(b)和圖11(c)中,d-q-x-y軸電流均能進行無靜差的有效跟蹤,尤其是x軸的正弦信號,采用重復(fù)控制可實現(xiàn)無靜差有效跟蹤。從圖11(d)中可以看出容錯運行下的轉(zhuǎn)矩輸出平穩(wěn),轉(zhuǎn)速波動小。驗證了缺相故障下基于電流補償容錯控制方法實現(xiàn)平穩(wěn)轉(zhuǎn)矩有效性。

圖11 A相缺相故障容錯基于電流補償容錯控制實驗波形Fig.11 Phase-A open-phase experiment waveform with current compensation based fault-tolerant control
圖12為A相S1開關(guān)管開路故障基于電流補償容錯控制實驗波形。由圖12(a)可知,相電流在兩個模態(tài)之間交替切換。對比圖11(a),可以發(fā)現(xiàn)DE的電流峰峰值顯著降低,得益于充分利用故障橋臂剩余的健全開關(guān)管。開關(guān)管故障容錯運行下半個基波周期處在缺相容錯運行模式,半個基波周期處在正常運行模式。圖12(b)和圖12(c)中,重復(fù)控制依舊能夠確保直流信號及x軸的非常規(guī)周期信號的有效閉環(huán)跟蹤。圖12(d)中,容錯運行下轉(zhuǎn)矩輸出平穩(wěn),轉(zhuǎn)速波動小。

圖 12 A相S1故障基于電流補償容錯控制實驗波形Fig.12 Phase-A S1 open circuit experiment waveform with current compensation based fault-tolerant control
圖13為A相缺相故障最小銅耗容錯控制實驗波形。圖13(a)可知,DE相電流幅值大于B相電流。圖13(b)和圖13(c) 中,d-q-x-y軸電流均能有效跟蹤其給定的最小銅耗參考電流。對d軸和x軸非常規(guī)電流信號閉環(huán)控制采用重復(fù)控制器,依舊實現(xiàn)高精度控制。從圖13(d)中可以看出,采用提出的最小銅耗容錯控制方法可確保容錯運行下轉(zhuǎn)矩和轉(zhuǎn)速的平穩(wěn)輸出。
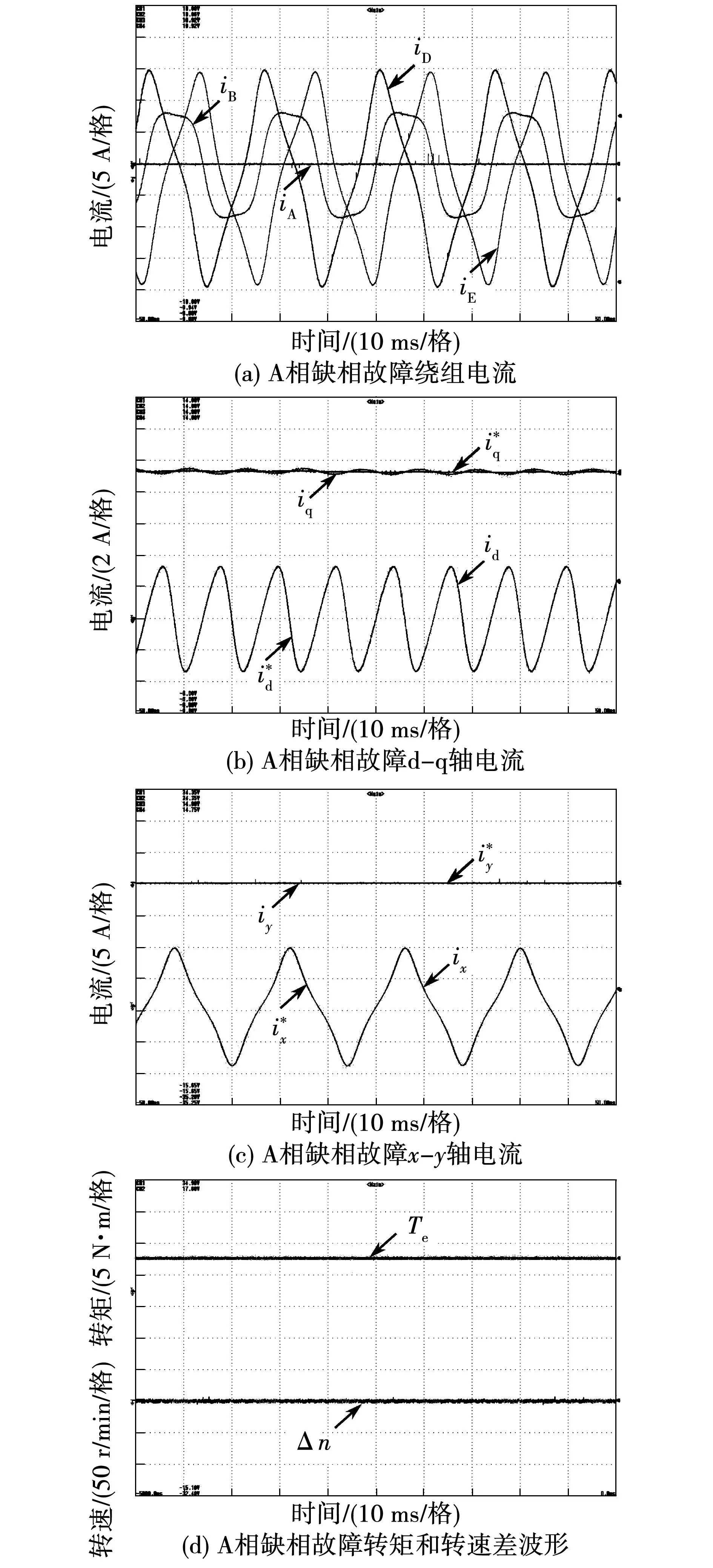
圖13 A相缺相故障最小銅耗容錯控制實驗波形Fig.13 Phase-A open-phase experiment waveform with minimum-copper-loss control
圖14為A相S1開關(guān)管開路故障最小銅耗控制實驗波形。圖14(a)中,各相電流在最小銅耗缺相運行模式和正常運行模式之間交替切換。從圖14(b)和圖14(c)可以看出重復(fù)控制器能確保給定開關(guān)管開路故障最小銅耗容錯控制下非常規(guī)參考電流的有效跟蹤。最終得以實現(xiàn)轉(zhuǎn)矩和轉(zhuǎn)速的平穩(wěn)輸出,如圖14(d)所示。
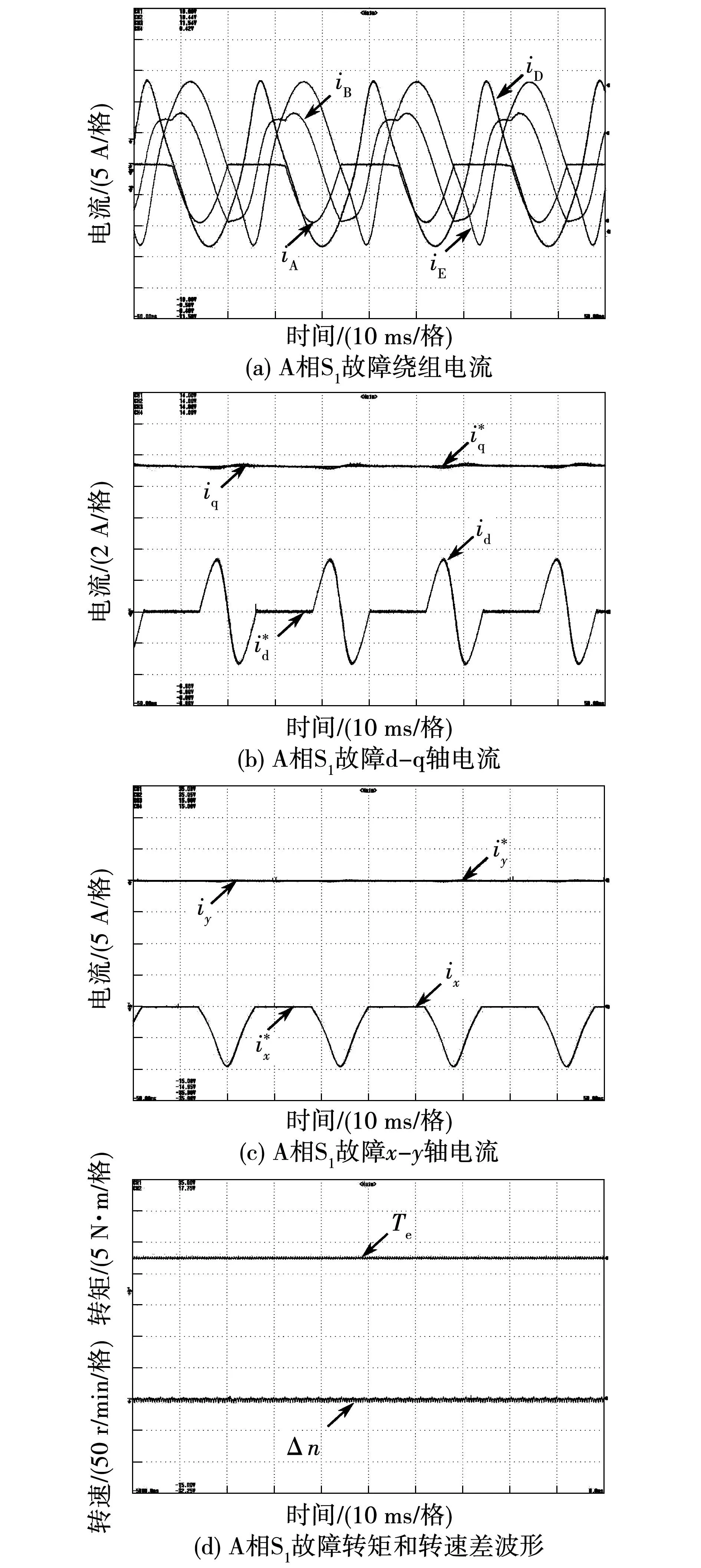
圖14 A相S1故障最小銅耗控制實驗波形Fig.14 Phase-A S1 open-circuit experiment waveform with minimum-copper-loss control
4 結(jié) 論
本文以雙三相電機永磁同步電機驅(qū)動系統(tǒng)為研究對象,提出了一種開路故障簡易容錯控制方法,提出方法在開路故障前后無須改變系統(tǒng)的控制框架、調(diào)制策略、電機數(shù)學模型,僅更改電流參考值即可實現(xiàn)容錯控制,降低了容錯控制的復(fù)雜度。本文還提出了基于電流補償參考電流優(yōu)化和基于最小銅耗參考電流優(yōu)化兩種電流優(yōu)化控制方法。在開關(guān)管開路故障下,通過充分利用故障橋臂健全開關(guān)管可進一步降低容錯運行銅耗。論文實驗結(jié)果充分驗證了提出容錯控制方法的有效性。
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年8期)2015-04-17 03:32:52
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年7期)2015-04-17 02:12:40
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39