雪崩的監測研究綜述
2024-01-18 10:26:18汶林科姚檀棟
冰川凍土 2023年6期
汶林科, 賈 靖, 姚檀棟
(1. 中國科學院 青藏高原研究所,北京 100101; 2. 中國消防救援學院,北京 102202)
0 引言
青藏高原東部是雪崩的高發區域,2023 年1 月17 日派墨公路米林與墨脫交界的多雄拉山口發生了嚴重的雪崩災害,截至1 月20 日,雪崩已造成28人遇難。嚴重的雪崩事件在藏東南并不是孤立事件,1996年3月24日,318國道八宿縣然烏鎮發生的雪崩造成了56人死亡,這也是我國記錄的最大的雪崩災害。根據西藏當地公安、武警以及公路交通部門的統計,藏東南每年都會發生規模不等的雪崩,連接墨脫、察隅等邊界縣與林芝的扎墨、派墨和察隅公路每年的2—4月都會因為雪崩而封路,嚴重制約了當地的社會和經濟發展。
藏東南雪崩發生頻率高、規模大、人員損失大與當地陡峻的地形和氣溫降水等氣象因素密不可分。隨著西藏的開發和旅游休閑的快速發展,人類活動在藏東南必將越來越多,雪崩造成的危害也必將越來越大。雪崩對藏東南地區影響最大的是當地的交通線、居民點和旅游業。針對這些問題,可采用的主要應對措施包括:未來的交通選線以及土地利用應盡可能避開雪崩危險區;無法避讓的交通線和村落及旅游設施要做好預測預警,在雪崩危險性高的時期或者區域需爆破除雪、封閉公路、撤離危險區人員,或者選擇合適的地點及工程措施對雪崩進行固定、疏導、阻擋等。
雪崩活動信息是雪崩定量化研究和災害科學防災減災最為基礎的數據。像其他雪崩區一樣,藏東南雪崩的各種應對措施也必須建立在可靠的災害危險性分析和風險評價的基礎上[1-5],而詳盡的雪崩時空活動信息是雪崩危險性分析和風險評價最重要的基礎信息[6]。雪崩的位置及規模信息,如發生頻次、運動距離、雪崩量、形成區釋放雪層厚度等對雪崩風險評價、雪崩區劃、雪崩過程模擬、雪崩工程參數的選取及雪崩工程設計都尤為重要。雪崩運動模型的建立及優化高度依賴于可信的雪崩形成區、流通區和堆積區的幾何參數[7];而特定氣象氣候背景和雪體力學性質下的雪崩預測和風險評價模型必須用可信的雪崩活動信息進行檢驗[8-10]。在雪崩工程設計中,工程類型、材質選取、結構設計和應力及強度計算必須以一定的基礎數據來支撐,這些數據包括:雪崩運動速度、運動距離、峰值流量、爬高、最大沖擊力、雪崩量等[4,11-13],這些數據的歷史記錄及其發生的概率對雪崩工程的評價也非常重要[14-15]。
雪崩活動記錄是雪崩研究中最重要的基礎內容之一,但到目前為止通過各種方法獲取的雪崩信息依然存在著雪崩時間序列不連續,或者記錄不準確等各種問題。即使在雪崩研究比較深入的國家,通常情況下只有那些造成人員傷亡、公用設施遭受嚴重損失,或者有目擊者的雪崩事件才被納入雪崩觀測記錄之中[16-18]。絕大多數雪崩都有相對固定的坡面或者溝槽,但現有的雪崩編目多以國家級的地理單元為基礎,涉及具體的雪崩地形幾何形態的觀測記錄也大多局限在可以到達的區域之內,使得大多數地區的雪崩事件都沒有被納入編目[18-19]。在瑞士的阿爾卑斯山區,由于人口相對稠密,雪崩事件的記錄相對翔實,而在雪崩研究比較多的挪威,由于人口相對稀少,即使在天氣狀況良好的時段也只有很少一部分的雪崩事件被觀測到[20],雪崩的觀測研究還遠不能滿足生產建設和科研的需要,因此,加強雪崩的觀測研究具有十分重要的現實意義和理論意義。隨著遙感技術的革新和發展,結合實地觀測,通過遙感監測研究雪崩成為雪崩研究的一個重要方向。
本文除重點介紹雪崩遙感監測外,也介紹了雪崩監測的其他幾種方式:實地試驗觀測、定點監測和次聲地震波監測等。在實際的防災減災中,一種監測手段可以實現多種功能,在經費充足的前提下,也可以采取不同的監測手段相互印證,來實現某一項功能。這里首先介紹實地觀測的幾種主要手段。
1 雪崩的實地觀測
1.1 實地雪崩試驗觀測
主要在雪崩形成區以相對固定的時間間隔連續對雪體進行觀測,研究雪崩形成的熱力及動力學過程,并對雪崩危險度進行預測。實地監測的目標包括以下三個方面:第一類是利用自制儀器以及延時相機等儀器觀測近期雪崩活動、裂隙擴展的聲響,或現場進行各種雪體試驗。雪體試驗包括滑塊試驗(Rutschblock Test)、壓縮試驗(Compression Test)、深敲擊試驗(Deep Tab Test)、雪柱試驗(Column Test)、延長的雪柱試驗(Extended Column Test)等,這些試驗可以直接觀測雪體的穩定度,穩定度是雪崩危險度預測最直接的因子(第一級因子);第二類是利用應力框、貫入式硬度計等儀器測量各雪層的機械物理性質,包括各雪層厚度、粒徑、雪晶類型、密度、溫度、含水量、硬度、內聚力、抗剪強度等數據,這些數據是雪崩預測的第二級因子;第三類是利用自動氣象站收集長短波輻射、風速風向、氣溫、降水等氣象因子(第三級因子)。以第二級和第三級因子作為邊界條件利用SNOWPACK 模型可以模擬雪體的穩定度。
雪體穩定度是預測雪崩危險度最重要的因子。研究表明[21-22],雪崩的危險度由低到高可分為五級,主要由雪崩暴發的概率、雪崩規模以及雪崩的激發頻率和激發位置決定,具體危險度水平可以查巴伐利亞矩陣(Bavarian Matrix)獲得。其中,雪崩暴發概率對雪崩危險度的影響最為顯著[8,22],而雪崩暴發概率由雪體穩定度決定,因而可以利用實地監測對試驗地點周邊100 km2區域的雪崩危險度進行預測預警[23-24]。當實時獲取的雪崩穩定度較低時,需要對重要公路進行封閉,當雪崩穩定度升高時可以開放公路交通,盡可能減少封閉公路的時間。另外,在雪崩危險度很高的情形之下,還可以選擇合適的時機和地點放置丙烷進行爆破除雪。
實地監測常被公路管理部門和氣象部門用來預測某些坡面、溝槽或者區域的危險度等級,也常被滑雪者用來預估某一地區的積雪是否穩定,是否適合滑雪等。
1.2 定點長期觀測
定點長期觀測主要觀測雪崩的動力學過程,利用架設在桅桿、塔或者壩體上的壓力、光電等傳感器或者調頻連續波雷達、多普勒雷達來監測雪崩流的結構剖面及密度、速度、氣壓、雪崩流高度、沖擊力以及雪崩物質平衡等主要參數的高頻變化。這些儀器通常布置在雪崩路徑上,多數屬于介入式觀測,即觀測儀器本身會對雪崩的運動形態產生影響。
雪崩定點觀測最主要的功能是建立和校正雪崩的物理-動力學模型,這類模型通常運用在潛在危險性分析和雪崩危險性制圖上[25]。物理-動力學模型的基本原理是雪崩流的運動主要受相對粗糙度和庫倫摩擦影響,而與雷諾數無關。歐洲相關國家利用阿爾卑斯山的長期定點觀測結果依次開發了Voellmy-Salm、AVAL-1D(流動雪崩FL-1D 和粉狀雪崩SL-1D)、RAMMS(rapid mass movement system)、SamosAT 等模型,模型從一維、二維到三維,干摩擦系數μ和湍流系數ξ也從取固定值升級到分段取值。利用動力學模型可以模擬真實地形下的雪崩流高度、沿雪崩路徑的流速和沖擊力、雪崩最遠運動距離以及雪崩堆積的質量分布,進一步還可以進行雪崩風險分析、雪崩區劃和土地利用規劃。雪崩定點觀測和物理動力學模擬的交互改進可以提高動力學模型模擬的準確性。在人跡罕至或雪崩觀測缺乏的地區進行公路鐵路選線、土地利用以及雪崩工程防治時,雪崩動力學模型可以提供較為可靠的數據支撐。
雪崩定點觀測的高頻數據對雪崩工程的設計至關重要。當前雪崩工程設計存在的重要問題是采用雪崩的沖擊力參數過小,導致導雪工程和攔雪壩因設計強度過低而被雪崩沖毀[26-27],這是因為由沖擊力公式估算得出的沖擊力在時間空間都是一種平均狀態。定點觀測中沖擊力傳感器的頻率至少在2 000 Hz 以上[28],可以極大地解決工程設計中的參數選取問題。
1.3 次聲波和地震波觀測
利用次聲波和地震波可以實時記錄雪崩事件及其發生的位置,進一步還可以推斷雪崩的運動學特征。雪崩密實流和坡面相互作用會釋放震動的能量,而粉狀雪崩的粉狀云前鋒擠壓空氣可以產生次聲波,這也使得利用次聲波和地震波監測雪崩成為可能[29-30]。地震波和次聲波與巖崩、地震以及直升機產生的噪聲在波形圖和頻譜圖上存在差異[31],因此與延時相機相結合,將地震波和次聲波傳感器沿雪崩路徑布設,可以測量雪崩前鋒的運動速度。基于不同位置噪聲不相關,而雪崩信號相關的原理,利用幾個次聲或地震傳感器組成陣列可以極大地提高信號的信噪比[32]。由于陣列中幾個傳感器之間存在一定距離,其接收信號的相位、反方位角會呈現明顯差異[10,31-33],因而采取波束成形(Beamforming)、多重信號分類(Multiple Signal Classification,MUSIC)[34]等算法可以確定某個時間窗口雪崩前鋒所在的位置,并確定雪崩運動的速度。
由于雪崩形成地震波和次聲波的機理不同,兩者各自都有適合監測的目標[30,35]。次聲波適合監測粉狀雪崩和雪崩運動的開始,而地震波適合觀測濕雪崩和雪崩運動的結束[30,36]。近年來的研究發現次聲波監測比震動監測具有更大的優勢,其原因不僅僅在于次聲的衰減較慢,還在于次聲波觀測的反方位角具有更好的連續性[30],可以更好地進行雪崩的定位[2,37]。
總而言之,雪崩的幾種實地監測手段各有利弊,也各有最適宜的觀測對象,在實地應用中綜合利用可以取得較好的監測效果。實地觀測較為準確,但實地觀測基本為相對固定的點或坡面,觀測范圍較小,也無法獲取時空的連續觀測數據。
當前使用雪崩遙感信息的用戶包括三種類型:第一是國家或省市災害預測預警單位,如國家或省市氣象部門;第二是政府部門,如災害管理委員會、公路局;第三類是公共用戶,如旅游局及其相關企業等。這幾類用戶需要的雪崩信息包括:雪崩的發生活動信息、雪體特征信息以及雪體的穩定度,其中雪崩活動信息是最主要的遙感監測信息,需具有實時性、可靠性以及較高的時空分辨率,時間分辨率一般不能低于3天,空間分辨率不大于5 m。定點觀測在夜間或惡劣天氣下,往往不能反映雪崩活動的真實情況,在這些時段某些遙感監測手段能發揮較好的作用。
雪崩的遙感監測目前還處于發展的初級階段[38]。2010 年前后雪崩堆積的遙感監測主要以光學遙感為主[16],利用面向對象的分類方法雪崩堆積識別的準確率可以達到87%,因為光學無法識別被新雪掩蓋的雪崩堆積,西方科學家嘗試利用其他的傳感器來識別雪崩堆積,合成孔徑雷達(SAR)被證明是一種非常有效的方法[39]。SAR 最初以地面為平臺進行雪崩堆積的監測[40],隨著哨兵-1 號衛星的發射和雪崩監測自動算法的逐步改進,SAR 已經在雪崩風險評價和制圖方面得到了廣泛的應用,并取得了很好的分類效果。
雪崩遙感監測的結果可以應用于雪崩的危險性分析和風險評價。雪崩的危險性分析包括兩個方面:第一個是根據已經觀測的雪崩歷史記錄分析雪崩發生時的各種情景及其發生的概率;其次是根據當前雪崩潛在的成災因素評估未來雪崩發生的類型和強度(指破壞力:堆積區運動距離、堆積體積和沖擊力)。前一個是后向計算(backward facing indication),而后一個是前向預測(forward looking indication)[4]。災害的風險評價主要是評估各種雪崩情景下潛在的危害情況,主要與承災體和暴露狀況有關。雪崩發生的歷史記錄是雪崩危險性分析和風險評價的基礎,在雪崩觀測資料較少的情況下仍可以制作雪崩危險性圖[Hazard (indication)maps],一般比例尺為1∶10 000~1∶50 000[41],主要反映雪崩發生的極端情景下的最大運動距離和雪崩堆積范圍,一般不夠詳細和準確;如果觀測時間序列較長則可以制作包含發生頻率和強度的雪崩危險度區劃圖(hazard zone planning maps),一般比例尺為1∶2 000~1∶10 000。雪崩危險度區劃是雪崩危險區土地利用、基礎設施選線和選址,以及雪崩工程防治的基礎和標準。
雪崩監測傳感器主要集中在光學、近紅外以及短波紅外波段,除光學遙感屬于被動遙感外,LiDAR和雷達都屬于主動遙感,其中LiDAR監測光學和近紅外波段,雷達監測微波紅外波段,波長在1 mm~1 m 之間,雷達監測在夜晚和較差天氣下能發揮較好的作用。
2 雪崩的光學遙感監測
積雪具有典型的反射光譜特征。在可見光波段(0.40~0.78 μm),積雪的反射率保持在0.8 以上,地表常見地物(如植被、裸土、水體)的反射率在0.5 以下[42],利用該差異可區分積雪與地表常見地物。雪崩過程中雪晶碰撞產生熱量導致雪體水分的增加、雪崩攜帶的土壤以及植被礫石等都會明顯降低雪崩體的反射率。另外,在雪崩發生后雪崩堆積與周圍未受擾動的積雪相比,堆積表面的粗糙度、形狀、密度、地表紋理、都會表現出明顯的差異,這些差異可以通過光學傳感器進行判讀[43-45]。由于雪崩堆積的紋理一般與坡向一致,Larsen 等[46]和Lato 等[17]利用基于對象的影像分析(object based image analysis, OBIA)和灰度共生矩陣(grey-level co-occurrence matrix, GLCM)對瑞士和挪威的快鳥和航空ADS40 影像建立了歸一化差分角指數(normalised difference angle index, NDAI),該指數利用GLCM熵、對比度、亮度等濾波器對雪崩堆積和未受擾動雪面進行了分類,可以準確判別94%的雪崩堆積。
通過對已有高分辨率的光學遙感數據進行訓練,可以開發雪崩堆積監測的算法,并在實際中加以驗證和應用。當前光學遙感主要利用延時攝影技術,已經有成熟的攝影監測技術對雪檐雪崩的動力學過程進行監測[47],即利用地面或無人機搭載的數碼相機攝影影像以及移動重構技術(structurefrom-motion, SfM),對雪崩堆積進行三維建模,通過對雪崩前后的數字高程模型DEM(digital elevation model)和數字表面模型DSM(digital surface model)相減還可以計算雪崩堆積體的體積。
雪崩的光學遙感有陸基、航空和航天三種平臺,其各種主要參數如表1所示。

表1 地基、航空及衛星光學傳感器的主要參數[17,38]Table 1 Properties of ground based, air-, and spaceborne optical sensors used for avalanche detection and mapping[17,38]
2.1 地基雪崩光學遙感
地基光學遙感的應用包括以下幾個方面:首先,可用于獲取雪崩發生的位置、最大運動距離、規模等信息;其次,長期的地基光學遙感觀測可以用于雪崩風險制圖,結合天氣預報還可以進行短期雪崩危險性預報及風險預測,幫助公路管理部門對是否采取封閉公路或者爆破除雪等措施進行決策。長時間序列的雪崩釋放區和堆積區位置信息是雪崩模型建立、校正以及檢驗最重要的參數。雪崩運動距離和范圍及其概率分布也是雪崩工程設計最核心的基礎數據,這些數據都可以通過雪崩的光學遙感獲取。
除常規的觀測雪崩事件外,地基光學遙感最適合進行滑動雪崩和雪檐雪崩的連續觀測,并對這兩類雪崩進行預測預警。此外,利用地基光學傳感器還可以獨立或者與地震和次聲傳感器相結合進行雪崩前鋒速度的觀測[48-49],在某些雪崩模型的實地驗證中,地基光學測量常被用來測量雪崩云的高度[50]。
所有的雪崩遙感觀測都可以觀測雪崩的發生。在濕雪雪崩發生后,無論是形成區和堆積區都與周邊的反照率有不同程度的差異,在某些重要的雪崩溝槽或坡面,也可采用延時相機記錄濕雪雪崩的發生事件[51],并通過研究雪崩與氣象因子之間的對應關系預測雪崩。
當前地基光學遙感還用于對滑動雪崩(glide avalanche)和雪檐雪崩(cornice)的監測,延時可見光相機可以連續監測滑動雪崩[52]、雪檐雪崩(conice 或snowbank)[53]。將照相機固定在有利的觀測點上,將連續拍攝的影像做成動畫,可以直觀地觀測滑動雪崩張性裂隙的擴展和雪檐雪崩中雪堤的生長,利用觀測結果可以研究兩類雪崩的發生機理,并進行預測預警。Munroe[53]、van Herwijnen 等[47]和Vogel等[54]分別利用不同型號的延時相機觀測了東南阿拉斯加和挪威斯瓦爾巴德的雪檐雪崩,在Munroe[53]的研究中,他用延時相機圖像揭示了猶他州雪檐增長主要與風吹雪有關,并將19個雪檐雪崩按機理分為兩類:一類是降雪風吹雪引起的雪檐載荷的增加;另一類是溫度快速升高導致的雪檐強度的降低。van Herwijnen 等[47]和Vogel 等[54]的研究發現雪檐雪崩由降雪和風吹雪形成,但雪崩發生的時機和當時的氣象條件關系并不大,強降雪后的強風只對小規模的雪檐雪崩有指示作用,而大規模的雪檐雪崩與雪檐產生裂隙的時機有關,一般發生在裂隙產生的4~5 周內,雪崩的規模只與雪檐裂解的雪體體積有關。
Hendrikx等[55]、Feick等[56]和van Herwijnen等[57]分別利用延時相機記錄了美國蒙大拿冰川國家公園和瑞士達沃斯阿爾卑斯山東部的滑動雪崩,通過統計影像中滑動雪崩后壁張裂隙(tensile crack of avalanche crown)的像元數變化來監測滑動雪崩,并嘗試計算雪崩暴發前的氣象因子與滑動雪崩之間的關聯性來建立滑動雪崩的預測預警指標,其結果都不甚理想。但滑動雪崩暴發前張裂隙有一定的變化規律,如大多數滑動雪崩都在張裂隙出現的3日內暴發,4 日后暴發的概率會明顯減小[56],滑動雪崩暴發前張裂隙一般都會加速增大。
由于滑動雪崩在形成機理上存在較大差異,Dreier 等[52]在前人工作的基礎上將滑動雪崩劃分為冷雪崩和暖雪崩兩種形式分別建立兩者的氣象因子預測指標,發現冷雪崩暴發與最低氣溫和新降雪量有關,而暖雪崩與氣溫、雪面溫度(雪面長波輻射)以及雪層厚度的減小有關。
地基光學遙感的優點是:可以提供接近實時的雪崩形成區影像,而且價格相對低廉,成像精度和分辨率都比較高。拍攝頻率可以從2分鐘一幀到每日一幀,測量范圍可以從數米到幾百米。地基光學遙感的缺點是:由于環境溫度低,電池續航能力通常不足,相機維護時間間隔也將縮短;在可見度較低的天氣條件以及夜晚通常不能正常觀測;相對于航空和航天光學遙感,觀測范圍比較小且不連續。
2.2 航空雪崩光學遙感
與地基光學遙感一樣,航空光學遙感在雪崩風險制圖、模型改進、預測預警、防災減災等方面都發揮著重要作用。相比于地基遙感,航空光學的觀測范圍更廣;與星載光學遙感相比,航空光學遙感不受重訪期的影響,可以在雪崩發生后第一時間展開監測,監測的雪崩運動距離和雪崩堆積范圍比較準確。
航空光學遙感最主要的用途是觀測地形,因而觀測大多在夏季進行,在雪崩形成及動態監測方面的應用并不多。2009 年Bühler 等[16]利用航空推掃式數字掃描儀繪制了高分辨率的雪崩堆積圖,利用雪崩堆積與未受影響的雪面紋理和方向的頻譜信息差異,可以將中等到較大規模雪崩堆積與積雪區分,準確率達到了94%。Lato 等[17]根據這種掃描儀獲得的正射影像資料,采用像元與相鄰像元比較的方法,將雪崩堆積作為一個整體對所有觀測像元進行分割和分類,兩個案例研究的準確率均達到95%和97%。雖然利用肉眼從光學影像很容易把雪崩堆積與未受雪崩影響的雪面區分開來,但對于較大空間尺度上的雪崩堆積的判讀,利用人工判讀工作量大且費時費力,因而必須借助自動算法來進行識別[17]。為了將雪崩堆積與植被、自然降雪及其他地表更好地區分,Korzeniowska 等[18]利用OBIA 流程,建立了四種特殊參數,對像元進行自動分割及分類,這四種參數是:亮度、NDVI(normalised difference vegetation index)、NDWI(normalised difference water index)以及SDNDWI(NDWI 標準差),這種算法極大地降低了圖像判別中的脈沖噪聲(salt-and-pepper noise)。
近年來,由于無人機技術的蓬勃發展,無人機光學遙感也被廣泛應用于災害監測[58]。LiDAR 掃描儀以及雷達傳感器價格較為昂貴,無人機發生事故損失較大,所以無人機搭載光學和近紅外波段的自動相機是一種比較經濟的選擇[59]。無人機的光學遙感監測在保證地面分辨率的基礎上,可以觀測定點監測無法觀測的死角,受地面遮蔽物的影響比定點監測小,還可以克服衛星觀測重訪周期的影響,在某些可能的雪崩臨界時間點可以對雪崩釋放區進行加密觀測。SfM作為一種便捷的攝影測量方法,可以很好地與無人機結合進行三維建模,在雪崩堆積監測中得到很好的應用。Eckerstorfer 等[59]利用無人機搭載袖珍數碼相機在挪威北部Breivikeidet 河谷進行了攝影測量,每秒拍照一次并保證圖像的重疊,獲取了雪崩堆積的高分辨率正射柵格影像,并確定了雪崩堆積的邊界,計算了雪崩堆積的體積。
積雪深度是雪體觀測中最重要的積雪參數之一,積雪深度的增加不但直接增加雪體沿坡面向下的分力,還可以影響各雪層的密度、硬度以及各雪層的膠結程度進而影響雪崩的暴發及成災狀況[60-61],在實際雪崩研究中積雪深度是經常應用的積雪參數,如早期的研究中,積雪深度閾值被當作預測新雪和雪檐雪崩暴發的指標[6]。Veitinger 等[62]的研究發現,雪崩形成區的積雪釋放面積及雪崩規模與堆積區的積雪深度密切相關。Bocchiola 等[63]利用72 小時積雪深度一種指標在瑞士阿爾卑斯山區進行了雪崩風險制圖。因此,積雪深度監測是積雪和雪崩監測最重要的內容之一。
Bühler 等[64]采用Sony NEX-7 相機拍攝系統在瑞士達沃斯附近兩個地點進行了多旋翼無人機積雪深度的遙感監測,建立了DSM 模型,與定點Li-DAR 測量結果比較精確度相差不大,標準差介于0.07~0.15 m 之間。De Michele 等[65]利用固定翼無人機測量了意大利倫巴第大區Val Grosina 河谷的積雪深度并與12個定點觀測數據進行了對比,發現遙感數據定點觀測的積雪深度的平均差值為7.3 cm,標準誤差0.143 m,觀測數據的方差與像元的大小有關。Adams 等[66]在奧地利北Tyrol 的阿爾卑斯山地利用架設在固定翼無人機上的Sony NEX5R 自動相機觀測了這一地區的積雪深度,獲取了不同時段可見光和近紅外波段的雪深資料,并利用SfM 三維建模,獲取了這一地區的數字表面模型(DSM)和積雪深度,發現在照度較好的條件之下,兩者的精度分別≤0.25 m 和≤0.29 m,均在1σ 范圍;而在照度較差的條件之下,近紅外的精度要明顯好于可見光。
航空光學遙感的最顯著優點是能快速獲取高分辨率的地面影像,還可以利用SfM 建立DSM 模型,而且具有較高的精度,Bühler 等[67]的研究表明,航空光學遙感的精度大約為30 cm 的標準誤差,覆蓋范圍大約幾個平方千米,分辨率隨飛行高度而變化,大約在5~50 cm 之間波動。接收的輻射包括5個波段,最重要的是近紅外波段,該波段不易飽和,是建模的主要波段,這個波段對積雪的粒徑大小比較敏感,圖像的對比度也要優于RGB 影像。在圖像中地物充分暴露的前提下,均勻的雪崩堆積很容易與周邊環境區分,高分辨率的全色影像的判讀即使非專業人士也可以完成。在較大空間范圍內自動分類技術可以輕松判別大中型雪崩。航空雪崩遙感最主要的缺點是受天氣影響很大,在惡劣天氣下,飛機無法正常作業,另外航空遙感也非常重視時效性,如果不能及時對雪崩進行觀測,雪崩堆積很容易被新雪掩蓋而影響判讀效果。有人駕駛飛機的航空遙感一般成本較高,所以當下無人機得到了廣泛應用,但無人機的操作需要一定的培訓,而且在某些國家或地區無人機的使用受到一定的限制。
2.3 航天雪崩光學遙感
航天光學遙感在監測滑坡和地震等自然災害中應用比較廣泛,但利用衛星搭載光學傳感器來監測雪崩的研究還比較少。航天光學遙感監測雪崩的基本機理是雪崩暴發前后雪崩的形成區、流通區、堆積區的表面反射率呈現出不同程度的差異,而這些差異可以很直觀地從光學影像中得到識別。雪崩三個基本形態分區與未受擾動的積雪表面的反射率也會出現明顯的不同,其中以堆積區的變化最為顯著,這主要與雪崩后雪崩堆積密度和含水量的增加有關,另外雪崩運動因攜帶固體物質,如碎屑或者植被,也會造成堆積區表面污化和表面粗糙度變化。相對于星載SAR 只能測量中等以上規模的雪崩,衛星重訪期長,且影像不直觀等局限外,星載的光學遙感也具有自身的優勢。Hafner等[68]利用深度學習和神經網絡算法對SPOT 6/7 影像的雪崩堆積進行識別,取得了很好的分類效果。Larsen等[69]和Lato 等[17]利用快鳥衛星的光學影像對挪威西部的雪崩進行了判別研究,他們發現在照明過度以及高緯度地區太陽高度角較小時容易形成曝光不足的區域,人工識別雪崩堆積幾乎不可能實現,但合適的自動判別算法可以提高陰影區和過度照明的雪崩判別成功率。
當前星載雪崩堆積光學遙感識別最主要的分類方法是面向對象的自動分類算法。將光學影像的柵格數據利用灰度共生矩陣熵對像元亮度進行標準化處理后,再進行亮度濾波(去除暗的區域)、邊緣對比度處理(去除巖石等物體影像)、相似性濾波(去除不同特征孤立的像元)、密度濾波(去除其他特征的像元),最后將獨立的空洞用周邊的像元進行填充后就可以將雪崩堆積和周邊積雪進行分割。
Eckerstorfer 等[70]在挪威北部利用Landsat-8 全色影像人工判讀了大型雪崩堆積,分辨率15 m,并以此作為Radar 判讀雪崩堆積的標準。Bühler 等[20]利用SPOT6 和SPOT7 影像以及圖像增強技術人工判讀瑞士12 500 km2范圍內包括過度照明以及陰影區18 737 條雪崩堆積,與其后的直升機獲取的照片進行對照,發現可以利用高分辨率的光學衛星影像對某個雪崩周期內大范圍的雪崩活動進行監測,高分辨衛星獲取的雪崩活動信息具有可靠性、完備性和準確性。
高分辨率光學遙感圖像識別雪崩的優點是技術相對比較成熟,錯誤率低。這類影像有很多種,其中快鳥衛星圖像分辨率高且可以用于商業用途的影像,它包括一個全色波段和4個多光譜波段,全色波段分辨率0.6 m,多光譜波段分辨率2.5 m,重訪周期1~3.5 天,幅寬16.5~19 km,這些參數可以滿足雪崩風險制圖的需求。2016年我國發射的高景1號全色波段分辨率可達0.5 m,在某些無法到達的區域可以用來檢驗雷達雪崩遙感監測的準確性[71]。從2013年開始,Landsat-8提供了免費的高分辨率衛星影像,全色通道分辨率15 m,影像視場100 km×100 km。星載光學遙感的一個重要缺陷是影像無法聚焦在待研究的區域,而且觀測的時機難以準確把握。2015 年以后Sentinel-2(哨兵-2 號)系列衛星逐漸投入使用,Sentinel-2攜帶可見光、近紅外和短波紅外傳感器,包括13 個波段,分辨率分別為10 m、20 m 和60 m,影像視場范圍290 km×290 km。近年來全球發射了大量低軌道、低價格、高分辨率的光學遙感衛星,使得雪崩的光學遙感監測越來越可信。光學遙感圖像識別的缺點是,光學遙感依然受遙感方法、雪崩溝槽坡度朝向、陰影、惡劣天氣以及過度照明等問題的限制。另外,風改造過的雪面和積雪覆蓋植被后可能呈現出與雪崩堆積相似的紋理特征,從而影響光學影像識別的準確率。如果雪崩堆積被新雪覆蓋,也會減小光學遙感識別的概率。
3 雪崩的LiDAR(地面和航空)遙感監測
LiDAR 是一種主動激光遙感,其基本原理是激光掃描器發射近紅外波段的激光脈沖,激光脈沖到達地面受雪面反射后被掃描器的光電二極管接收,利用脈沖信號往返所用的時間可以確定掃描儀與地面的距離。脈沖信號的數據以點云的方式被記錄在掃描儀的內置坐標系中,通過配準等參數處理方法可以將掃描儀內置坐標系的數據轉換成全球坐標系下的地表高程。以飛機或無人機平臺的Li-DAR,利用激光脈沖測量目標的距離,還需要通過定位系統,如GNSS 衛星定位系統(Global Navigation Satellite System),將目標地物轉換為具有位置及高程的空間坐標信息的點云[72],將有雪時地表的高程數據與無雪時的高程數據進行對照,可以獲取厘米尺度的高分辨率積雪深度數據。
LiDAR 具有分辨率高、抗干擾能力強的優點,可以架設在視野開闊的固定觀測點或搭載在飛行器上,來獲取雪崩形成區到堆積區精確的積雪深度資料[73],結合攝影測量可以為雪崩動力學建模及雪崩物質平衡研究提供重要參數。
LiDAR 在判別雪深方面具有很大的優勢,在實際應用方面,LiDAR 在雪檐雪崩、風吹雪的防雪柵欄的高度設計和位置的確定、直升機爆破除雪炸藥投放位置的選取以及阻雪工程設計方面發揮著重要作用;LiDAR 獲取的連續三日積雪深度常常被當作雪板的厚度應用到雪崩的模型模擬和預測當中。如72 h 新降雪厚度超過90 cm 時,99%的雪崩溝槽都具有很大概率會發生雪崩。
在當前的雪崩危險性和風險評估中,LiDAR 也發揮著重要的作用。每次雪崩發生時雪崩形成區中的釋放區通常都不盡相同,危險性分析中釋放區通常通過分析高分辨率DEM(一般大于10 m)的坡度、朝向、起伏度和曲率來確定[46,62],LiDAR 測量的高分辨率和高精度的雪深資料可以極大地提高雪崩釋放區識別和雪崩風險評估的準確性,并被廣泛應用到偏遠地區的雪崩風險制圖中[3,74]。冬季積雪能通過填洼改變地形的表面特征,不同的冬季地表特征對隨后的雪崩運動特征有顯著影響,積雪模型中的干摩擦系數和庫倫摩擦系數的選取對模型模擬的結果有很大影響,LiDAR 獲取的冬季積雪深度對這兩種摩擦系數的確定有非常重要的參考價值。當前在獲取雪崩釋放區DEM 時,飛機或無人機搭載的LiDAR 傳感器已逐漸取代了傳統的攝影測量。
3.1 地基LiDAR 雪崩遙感(terrestrial LiDAR scanner,TLS)
Prokop 等[75]首先將LiDAR 架設在地面用于雪崩監測(圖1),他發現在晴朗的天氣下,500 m 范圍內TLS 監測雪深的標準差不超過10 cm。Prokop等[75-76]的三個松雪雪崩案例研究表明,TLS 能監測到形成區雪體的釋放和堆積區體積的增加,并可對雪崩的物質平衡進行研究。Deems等[72]在科羅拉多的Arapahoe 盆地進行了類似的研究,利用TLS 觀測了無雪和有雪覆蓋的雪崩溝槽形成區積雪損失量、雪崩釋放時流通區雪深變化以及雪崩后堆積區雪崩堆積高度變化,計算了雪崩堆積量。Prokop 等[77]結合TLS 觀測、延時相機、積雪定點觀測以及實地的雪坑資料,對法國阿爾卑斯山Col du Lautaret 雪崩站的雪崩發生動力學進行了研究,發現TLS 觀測對于研究雪崩機理有重要的參考價值,并為雪崩的動力學模型的建立提供了一種重要的生長參數,雪崩堆積體積與雪崩形成區釋放和流通區攜帶體積之和的比值為1∶1.87。
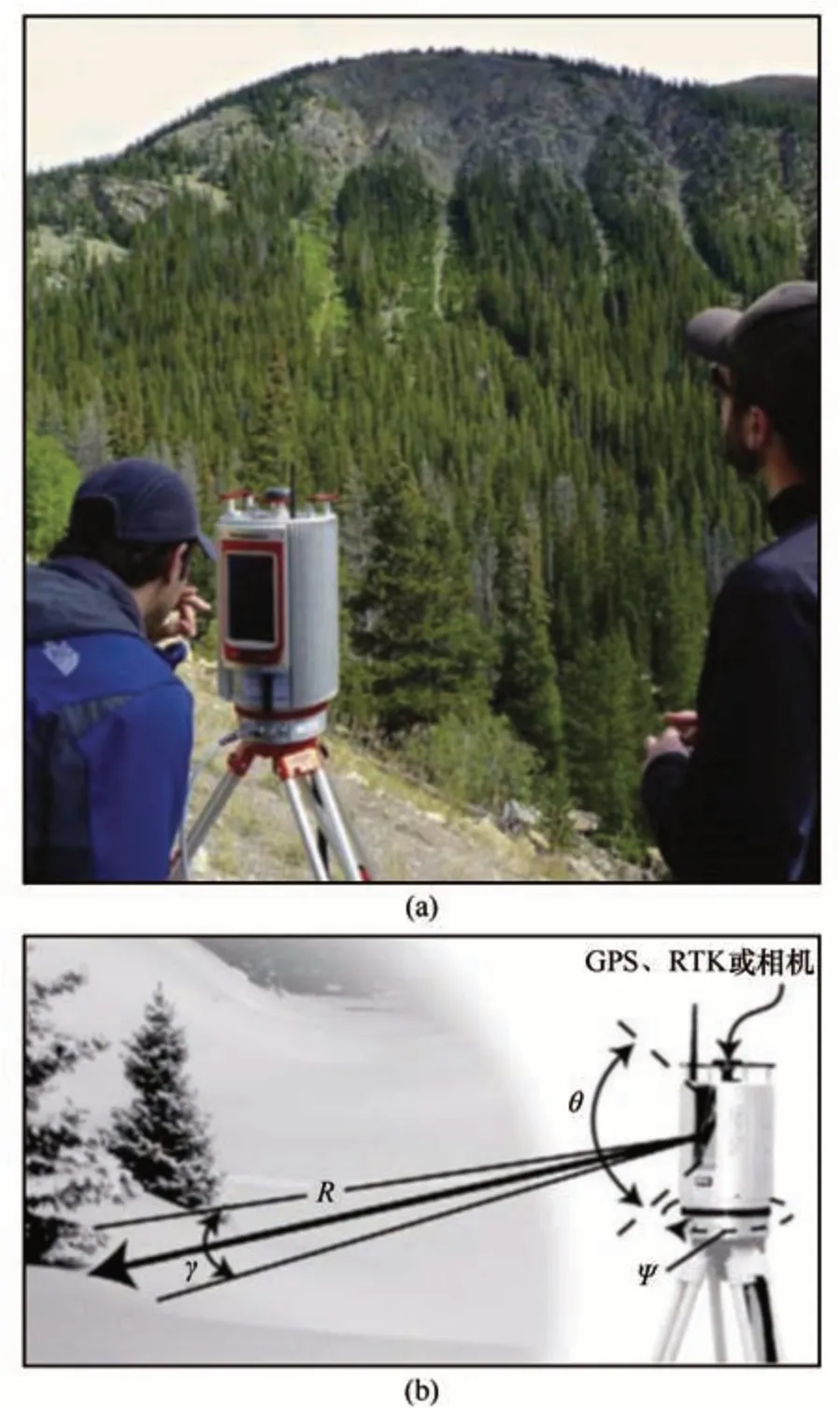
圖1 地面LiDAR遙感[72]:無雪時利用Riegl VZ-4000繪制大比例尺地圖(a);主要參數圖示(b)Fig. 1 The avalanche monitoring using ground-based LiDAR:Riegl VZ-4000 during snow-free mapping (a); schematic representation of scan parameters (b)
TLS 在雪檐雪崩的觀測方面發揮著重要作用。積雪深度與積雪密度、硬度關系密切,在積雪達到臨界深度時,雪檐就有可能釋放[72]。雪檐雪崩與風吹雪以及特殊地形下的最大積雪深度有著非常重要的聯系。迎風坡風力增大時會出現雪檐加速形成的現象,而TLS 觀測的高分辨率積雪深度為研究最大積雪深度的空間分布提供重要手段。Fey 等[78]在奧地利的Weisssee 觀測點研究了TLS 觀測資料的可靠性,并與自動氣象站的雪深實際觀測對照,發現均值相差僅0.03 m,均方差0.02~0.1 m,說明TLS 觀測的積雪深度是可靠的。Hancock 等[79]利用Riegl VZ-6000 觀測了挪威Svalbard 地區2015 年12月和2017 年2 月兩次災害性雪崩發生前后積雪厚度的分布狀況,探究了這一地區大雪崩的發生與東風以及強降雪之間的關聯性,指出特定大氣環流形勢下的降雪以及風速風向對積雪的再分配是形成災害性雪崩的最主要原因,在這些情形之下自動氣象站記錄的積雪深度不能反映積雪的實際狀況,而TLS記錄的坡面的積雪深度及其時空變化卻能反映真實的積雪分布狀況。Hancock 等[80]還利用TLS 研究了中斯瓦爾巴德地區雪檐雪崩發生的動力學過程,通過對比2016—2018年的雪檐雪崩發生記錄與TLS 觀測雪檐雪厚度變化,他發現暴風雪引起的雪檐的增長速率可以達到10 mm·h-1,6 次雪檐雪崩中5次雪崩暴發是由于雪檐的快速增長導致,僅有1次是冬季溫度升高時期的降雨所致。
地基LiDAR 遙感監測最主要的特點是精度高,已經成為當前積雪深度遙感監測最常用的手段[66],它可以獲取高精度連續性的雪深資料,適合對暴發頻繁且危險度高的雪崩坡面或溝槽進行重點連續觀測。但其缺點也很突出,比如觀測區域相對較小而且TLS 儀器重量較大,這也意味著TLS 只適合觀測容易到達區域的雪崩,而且操作技術含量高,需要有一定工作經驗的專業人士來完成,觀測工作比較費時費力。另外,LiDAR 較高的價格一直是其大規模使用的限制因素。
近年來LiDAR 技術取得了長足的進步,許多老型號的LiDAR 產品如Riegl LPM-i800HA、LPM-2 K或者LMS Z420i 都已被淘汰,近年來投入使用的RieglVZ-4000、RieglVZ-6000 以及Optech Ilris LR 由于使用波長的不同,掃描速度更快,掃描范圍更大,掃描的距離可達6 km,精度和準確率也更高,也更加便攜,受天氣因素的影響也更小。新一代LiDAR最大的缺點是設備價格較高,包括TLS 觀測系統、單反相機、GPS以及使用軟件都價格不菲。
3.2 航空雪崩LiDAR 遙感(airborne laser scanner,ALS)
航空LiDAR 遙感(ALS)和地基LiDAR(TLS)搭載平臺不同,主要采用飛機或無人機搭載。ALS相比TLS 還使用了GPS 和慣性傳感器(inertial measurement unit, IMU)組合的一套導航系統(圖2)。
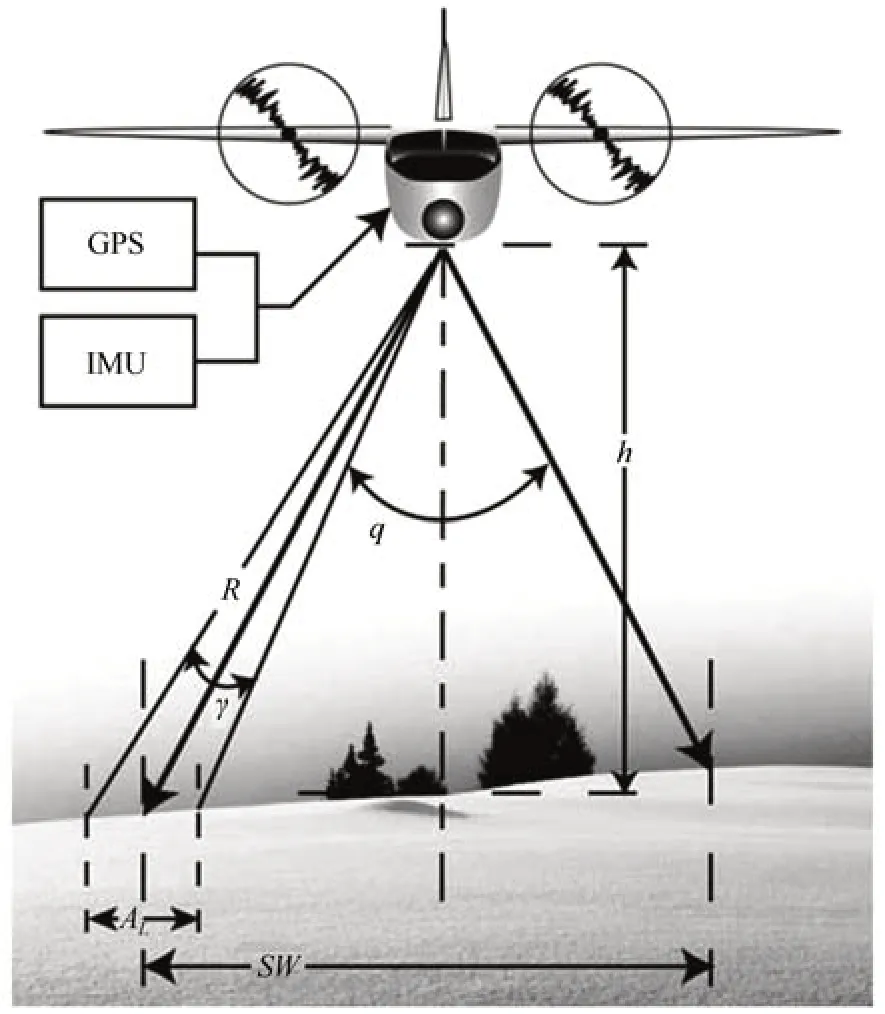
圖2 航空LiDAR遙感Fig. 2 Airborne LiDAR remote sensing
2000 年Vallet 等[81]首先使用Optech ALTM 1020 激光掃描儀以直升機為平臺監測了瑞士Vallée de la Sionne 站的雪崩堆積,精度20~30 cm。Chrustek 等[82-83]利用DA42 飛機搭載的Riegl LMSQ560 獲取的高密度點云建立了波蘭Tatra 山脈雪崩潛在釋放區的DEM 和RAMMS(Rapid Mass Movement Simulation)運動模型,并分別以1 m 和25 m 空間分辨率的DEM 模擬了重大雪崩事件的雪崩釋放量,發現兩種分辨率模擬的雪崩釋放量相差7%。Bühler 等[84]在瑞士達沃斯Tschuggen 和奧地利Lizum 地區探索了以無人機為平臺搭載LiDAR 進行三維重建以及制作高分辨率DSM的可行性,發現無人機LiDAR 測量以及近紅外波段技術在雪崩制圖方面具有較大的潛力。Sovilla 等[85]利用直升機搭載Riegl LMS-Q240i 沿雪崩路徑測量了瑞士Vallée de la Sionne 雪崩站雪崩堆積的厚度,垂直分辨率和水平分辨率分別達到了100 mm 和500 mm,揭示雪崩堆積厚度和坡度存在顯著的反相關關系。Veitinger 等[62]利用相同的儀器在同一地點研究了積雪深度對地表粗糙度的影響,發現積雪深度能顯著改變地表形態,較大的積雪深度能增加積雪釋放區的面積和雪崩的規模。
航空LiDAR 最適合監測積雪深度。相比TLS,ALS 可以觀測的區域更加靈活,不會出現監測死角。但當前利用ALS 對雪崩的研究還很少,其高昂的價格和使用技術依然是其廣泛應用的限制因素。NASA2016 年開展了航空積雪觀測項目(Airborne Snow Observatory 或ASO,Painter,2016)[86],主要目的是利用機載的LiDAR 和成像光譜儀通過研究積雪深度、水當量和積雪反照率,來揭示積雪的性質和分布,從而為水資源管理服務,其監測的準確性可以得到保證[87-89]。如Currier在該項目研究中對比了ALS 和TLS 的積雪深度觀測,在1 m 分辨率的影像中,兩者的中值相差5 cm,標準差(σALS-σTLS)相差3 cm,兩者最大差值出現在對灌木下墊面積雪的觀測中,ALS的入射角比TLS的入射角要小,ALS觀測的積雪深度比TLS 要大10 cm 左右,說明ALS在實地的觀測中是可信的[90]。
當前提供LiDAR 觀測系統的主要是Riegl、Leica 和Optech 三家公司,其中以Riegl 占有的市場份額最大。
4 雪崩的雷達(SAR)遙感監測
積雪具有典型的微波散射特性,雪崩前后的雪崩路徑,特別是堆積區的后向散射會呈現顯著變化。引起后向散射變化的因子可分為兩類:一種是積雪本身及下墊面的物理性質,如雪介電常數、雪表面粗糙度、雪深、下墊面濕度、下墊面粗糙度等;另一種是SAR 自身的參數,如頻率、極化方式、入射角等,與傳統的單極化SAR 相比較,多種方式的極化SAR測量的數據含有更豐富的地物信息。
雪崩發生后對散射變化影響最大的是雪面的含水量和粗糙度[91]。其中,雪崩的釋放區粗糙度變化最小,流通區次之,而堆積區最大。因此,堆積區的后向散射相比于雪崩前出現了顯著的突然增加,因而堆積區也成為雪崩雷達遙感監測最為關注的區域。Eckerstorfer 等[70]在挪威北部Troms 縣利用Radarsat-2 雷達資料對比了546 條雪崩發生前后堆積物的后向散射,統計發現兩者差的中值增加了3.7 dB,雪崩堆積從中心向周邊500 m 的緩沖區內雪崩前后其后向散射大約相差1.5 dB。雪崩堆積相比于雪崩前堆積區域的雪量、密度、含水量、表面粗糙度都有了顯著的增加,這些因素都促成了后向散射的增加。
積雪的另一個微波特性體現在相干性特征方面。微波穿透積雪和雪崩堆積時,由于雪層密度、含水量的差異,同軌道SAR 監測的雪崩發生前后相位信息會發生改變[92-93]。對于沒有雪崩堆積覆蓋的地表,SAR 兩次觀測的相位是一致的,相干系數會明顯高于雪崩堆積,相位信息的變化與否也是雪崩堆積識別的另一個依據。
雪崩的SAR 遙感監測在其風險評估和土地利用規劃中發揮著非常重要的作用。與雪崩的動力學模型不同,長期監測積雪最大運動距離、最大前鋒運動速度及覆蓋范圍可以預測某次雪崩到達某個位置的概率,利用統計獲取的這種概率密度符合皮爾遜Ⅲ型分布[94],這種極值分布可以為雪崩的工程防治提供相關設計參數。
SAR遙感監測還可以對雪崩發生的危險等級進行預測,比如哨兵-1 號衛星一般具有12 天的重訪期,其軌道包含兩個升軌和兩個降軌,在6天內可以得到4 幅影像[95],4 幅影像相互間隔大約2 天。因為短期內雪崩堆積區面積增加預示著某一區域內雪崩的危險增高,因而可以根據雪崩堆積區面積變化對3級以上中等到大規模雪崩的危險性進行評估。
SAR影像還可以輔助鑒定雪崩發生的類型。因為后向散射對雪體的含水量比較敏感,所以可通過監測后向散射的變化來反演雪崩是否為濕雪雪崩[96]。一般來說,含水量少的粉狀雪崩和含水量異常豐富的雪泥(slush)運動距離都比較大,只有含水量中等的潮雪雪崩(moist avalanche)的運動距離最短。
4.1 地基雪崩SAR監測的應用
雪崩堆積的后向散射會呈現顯著的物理性質變化,從而降低散射時域的關聯性,這種關聯性即相干性。Martinez-Vazquez 等[40]利用地基線性SAR采用C 波段5.8 GHz 獲取了雪崩的干涉位相圖,經過相干性分析、相位解纏、大氣相位校正、地理編碼等步驟對雪崩堆積進行分類,發現觀測的正確率達到73.5%,漏報率(false-negative rating)為7.4%。分類的結果對分類閾值的選取比較敏感。此外,他們還發現利用地基差分干涉SAR(DInSAR)獲取雪崩體積具有可行性。
Wiesmann 等[97]和Caduff 等[98]分別在瑞士達沃斯部署GAMMA 便攜式干涉儀(17.2 GHz,Ku 波段)進行了短期滑動雪崩(glide avalanche)的連續監測,每2~3 min 獲取一幀圖像,除可以觀測到小型雪崩以外,他們還發現強烈的太陽輻射導致的雪體含水量增加可以顯著影響圖像的相干性。通過圖像解纏,Caduff 等[98]獲取了視距方向(LOS)積雪的蠕動位移。因為濕雪雪崩、全層滑動雪崩在雪崩釋放前雪崩形成區都有比較明顯的表面位移,因而Caduff 等[99]建議利用地基SAR 來監測和預警這兩類雪崩的活動狀況。
現有的地基SAR 包括GPRI、LISAlab 和Ibis-FL幾種類型的便攜式SAR(表2),獲取圖像的時間和空間分辨率都很高,時間分辨率可達30 s,水平分辨率與距離儀器的遠近有關,最高可達1 m(像元尺寸),水平距離1 km 處分辨率大約8 m,監測范圍50 m 到18 km。地基SAR 對雪面變化非常敏感,可以監測到毫米級的微小變化。在電力供應充足的前提下可以隨時展開觀測,不受天氣和光照因素的影響。地基SAR 的主要缺點是觀測范圍比較有限,價格昂貴,而且野外操作較為復雜,需要更多的經驗積累才可以實施。

表2 各種雪崩監測雷達的參數特征(根據文獻[38]修改)Table 2 Properties of ground based, air-, and spaceborne radar sensors used for avalanche detection(Revised on the basis of Reference [38])
4.2 航空雪崩雷達監測
航空雷達目前在雪崩監測方面的應用很少,但Eckerstorfer 等[38]認為航空SAR 監測雪崩在技術手段上是完全可行的,如德國航天中心(Deutsches Zentrum für Luft- und Raumfahrt,DLR)使用了ESAR,采用X、C、L、P 波段,波長范圍3~85 cm,可以利用單軌或者重復軌道對雪崩進行實時監測。
NASA 開發和利用無人機平臺搭載SAR 進行雪崩觀測,一般采用L 波段進行單軌或者重復軌道的InSAR 來觀測雪崩,無人機飛行高度在2 000~18 000 m 之間。由于衛星搭載的SAR 具有較長的重訪周期,在某些雪崩高發的時段而衛星SAR 又不能及時獲取地面雪崩信息時,無人機平臺搭載的SAR 可以作為雪崩監測的有效補充。Jenssen等[100-101]利用無人機搭載超寬帶雷達傳感器(Ultra Wide Band radar)對雪崩形成區的積雪深度、密度以及層理進行監測,并與現場挖取的雪坑觀測進行對照,發現兩種方法測量積雪深度的相關系數達到了0.87 以上,雷達觀測的雪體密度和層理特征與現場雪坑觀測也有較好的一致性。
積雪物理性質變化對雪崩預報的重要性要高于氣象因子[6]。但絕大多數的雪崩形成區往往不可到達,雪體力學性質往往不能實地觀測獲取,而無人機平臺搭載的SAR 可以填補這方面的空白。但到目前為止,無人機搭載SAR 進行雪崩監測的研究還很少,快速獲取雷達信息的算法也不成熟,雷達發送和接收天線的研究仍然是主要的技術難題[100]。另外,無人機搭載SAR 進行雪崩監測必須由技術熟練的專業人員來完成。
4.3 航天雪崩雷達監測
Wiesmann 等[102]最先使用C 波段的歐洲ERS1/2雷達進行雪崩觀測,發現舌狀雪崩堆積的后向散射與周邊積雪存在明顯差異。Malnes 等[103]利用C 波段的Radarsat-2 Ultrafine Mode (RS-2U)雷達影像對挪威北部的災害性雪崩進行了監測,該雷達數據空間分辨率30 m×30 m,幅寬20 km,當雪崩堆積與周圍積雪后向散射的差值在1.5~2.3 dB 時,雪崩堆積可以用肉眼進行分辨。Eckerstorfer 等[70,104]利用12景2014 年3 月的RS-2U 雷達影像對挪威北部Troms縣雪崩進行了判讀,在讀取的546 個可能的雪崩堆積中,剔除了頂底倒置、重復讀取以及雷達陰影外,獲取了467 個雪崩的影像,其中37%的雪崩得到了實地或者光學遙感影像的驗證。RS-2U雷達影像觀測精度較高,但12 景影像僅能覆蓋Troms 縣12%的范圍。2014 年發射的哨兵-1 號(Sentinel-1)衛星作為一種免費的雷達遙感衛星被廣泛地應用到雪崩的監測中,哨兵-1 號包括2014 年發射的哨兵-1A 和2016 年發射的哨兵-1B,幅寬一般250 km,分辨率20 m×5 m,采用VV 和VH 極化方式,重訪期一般12 d,作為極地衛星,極地的重訪期可縮短至2~3 d(表2)。一景哨兵-1A(Sentinel-1A)圖像即可以覆蓋整個Troms 縣,其面積大約250 km×250 km,水平分辨率約20 m。Malnes 等[105]首次將哨兵衛星用于雪崩的監測,他觀測了挪威北部Troms 縣的中等及以上規模的雪崩(雪崩規模分級見表3),其中升軌505 個,降軌404 個。對比雪崩堆積與周邊雪面的微波后向散射變化,雪崩堆積與未受擾動的積雪相比,雪崩堆積表面粗糙度更大,后向散射相應也更大。雪崩堆積在形態上呈舌狀向下延伸,其形態很容易與周邊環境區分開來。Vickers 等[106]引入自動算法大大減少了人工判讀的工作量,利用植被地圖掩膜排除植被水體,利用>35°坡度掩膜排除較大坡度像元,再排除雪崩前后散射差值<6 dB 的像元后,可以識別60%的雪崩堆積。Eckerstorfer 等[107]利用多軌道的哨兵-1 號衛星資料以及Vickers 的算法[108]自動監測了挪威北部2016—2018 年150 km×100 km 的雪崩活動,經過驗證發現最高準確率可以達到82%。2019 年Eckerstorfer 等[109]利用哨兵-1號衛星資料,在改進算法的基礎上,對挪威北部的雪崩進行了自動監測,并對監測到的其中57%的雪崩進行實地驗證,發現哨兵-1 號監測的準確率達到了79%。

表3 歐洲雪崩的規模分級[4,6](采用雪崩工程設計分類系統)Table 3 The avalanche size classification scheme used in Europe[4,6] (adopt the standard of avalanche engineering design)
星載SAR 的雪崩基礎研究成果近年來已經被應用到實際應用研究之中。Abermann 等[110]利用哨兵-1號雷達遙感資料,采用雪崩堆積與周邊未受雪崩擾動雪面的后向散射的動態閾值監測方法,監測了2016年格陵蘭西部的濕雪雪崩狀況,并揭示了濕雪和雪泥(slushflow)與氣象因子及大氣環流的關系,指出在雪層較薄時的突然升溫及高強度降雪是該地區濕雪雪崩形成的主要原因。Hafner 等[111]將哨兵-1 號的衛星雷達影像用于雪崩的風險制圖中,與SPOT 衛星以及哨兵-2 號等光學遙感相比,哨兵-1 號在監測大型雪崩方面比較準確(表3),對中小規模雪崩的監測存在較大誤差,這與Abermann等[110]的研究一致。
Leinss等[91]利用TerraSAR-X(TSX)雷達遙感資料對瑞士中部的雪崩進行監測,TerraSAR-X 是德國航天中心(German Aerospace Center)研發的一款雷達衛星,屬X 波段(9.6 GHz),重訪期11 天,單視復數影像的分辨率可達2.3 m×3.3 m,將多軌的哨兵-1號與單軌的TerraSAR-X進行對照,發現兩種雷達衛星監測的雪崩信息非常一致,并用光學遙感的SPOT-6 進行檢驗,發現在雪崩高發的2018 年1 月4日共有7 361條新發雪崩。
利用衛星雷達監測雪崩的最大優點是不受光照和天氣因素的影響,可以進行全天候監測。缺點是容易受到地形影響,也會受到衛星重訪周期的影響,對雪崩周期(avalanche cycle)內雪崩高發時段災害的發生無法進行加密觀測,在雪崩堆積被新降濕雪覆蓋時其后向散射無法與周圍環境的后向散射進行區分,造成雪崩記錄的遺漏,而且監測費用比較昂貴。一個經過地理編碼的高分辨率SAR 影像,如RS-2U,熟練的觀測人員可以分辨出較小規模的雪崩。但較小雷達入射角形成影像的頂底倒置和透視收縮往往會影響雪崩判讀的結果。2014 年后的哨兵-1 號雷達影像可以在網上免費下載,但其分辨率較低,使得哨兵-1 號僅能準確監測到4 級和5級的大型和超大型雪崩,對1 級和2 級雪崩無法判別,對三級雪崩僅能監測50%左右(表3)[91]。利用自動算法可以減少雪崩雷達監測的工作量,但對比雪崩前后散射變化時,不同時段參考影像的選取會大大影響自動監測的準確率,選取不同的掩膜可能會導致像元在K 均值聚類時混淆雪崩堆積與其他地物[108],這也說明僅依靠后向散射一項指標監測雪崩會存在較大誤差。
5 討論
雪崩的遙感監測是2010 年代以后才逐漸開始應用的一種雪崩監測手段,其優點是研究人員與雪崩直接接觸的機會很少,減少了雪崩對觀測者的傷害;數據的觀測與獲取具有連續性,可以保證建立雪崩觀測的連續時間序列,這些特點使得雪崩的遙感監測具有定點監測所不具有的優勢及較好的應用前景。但對于光學、LiDAR 及雷達三種不同的傳感器類型,對應地基、航空以及航天三種不同的平臺,其應用的潛力及制約因素也不同。
5.1 光學、LiDAR及雷達雪崩監測的比較
綜合比較三種傳感器的重訪期、分辨率以及費用的各個因素,總的來看,雷達是最適合進行雪崩監測的傳感器(表4)。

表4 雪崩監測中光學、LiDAR和雷達三種傳感器的綜合排名(修改自文獻[112])Table 4 Ranking of optical, LiDAR and radar sensor platforms based on advantages and disadvantages(Revised on the basis of Reference [112])
雪崩的遙感監測通常受以下幾個方面因素的影響:監測時間間隔、監測范圍、空間分辨率、監測費用、對天氣的依賴狀況、技術難度、操作難易程度等。Frauenfelder 等[113]指出通過遙感獲取雪崩記錄的可靠性是雪崩預測模型是否準確的基礎,而監測中小規模的雪崩時遙感數據的水平分辨率是最主要的制約因素,Eckerstorfer 等[38]認為,監測雪崩運動距離介于10~100 m 的小型雪崩時,遙感數據的分辨率必須小于30 m。只有在分辨率得到保證時,監測的漏分誤差(omission error)和錯分誤差(commision eror)才可能減小。在雪崩規模較大、雪崩堆積與周邊環境對比度較大或者雷達入射角較為有利時,一些分辨率較高的雷達衛星數據如哨兵-1 號才可以使用。但分辨率較高時幅寬一般都較小,觀測范圍有限。
時間分辨率對雪崩監測的準確性也非常重要,它主要與圖像獲取時間(重訪期)有關。以地面為平臺的延時相機、LiDAR 和SAR 觀測間隔都較短,受時間分辨率的影響較小;而衛星平臺的雷達或光電傳感器由于重訪期比較長,如果雪崩堆積被隨后的新降雪覆蓋,雪崩堆積影像不容易與周圍環境區分,從而造成雪崩事件的漏測。
野外的雪崩監測中如何選取合適的監測手段以及何種平臺主要取決于以下幾個方面:第一是研究區的緯度,哨兵-1 號的重訪期在極地及高緯地區比較短,可以減少雪崩的漏測;第二是研究區的范圍和可到達性,研究區范圍小且容易到達時適合利用地基的光學傳感器、LiDAR 或雷達,一般時間和空間分辨率都較高;第三是研究目的,機理研究或實際應用應采取適合各自特點的平臺或手段;第四是研究人員對研究手段或平臺使用的熟練程度;第五是研究項目經費情況。
LiDAR 是所有雪崩監測手段中精度最高的,且對天氣依賴程度不高,但由于其監測范圍比較有限,因而被廣泛地用于積雪深度的監測。衛星搭載的SAR觀測范圍較大,不受天氣因素影響,監測操作比較容易,但是它存在重訪周期長、水平分辨率較差以及在復雜地形之下數據誤差較大的問題。地基SAR價格昂貴,且觀測范圍比較小,但也有重要的應用場景,對一些重點雪崩地形,如位于大型滑雪場的坡面雪崩,可以考慮采用地基SAR 進行監測,因為地基SAR 可以監測到毫米級別的雪面運動(如雪面蠕動),對于滑雪場的安全預警具有特殊意義。
地基和航空的光學遙感的監測范圍小,受天氣因素制約嚴重,因而光學遙感的雪崩記錄往往存在時空不連續性。但光學傳感器,包括延時相機和數碼攝影測量都相對便宜,還可以搭載在無人機上,選擇在雪崩周期內加密觀測可以對星載SAR 記錄的雪崩記錄進行驗證。
近年來隨著衛星及攝影科技的發展,很多寬幅高分辨率的光學傳感器投入到了監測災害,如藍鳥(0.6 m)、worldView-1/2(0.5 m)、Kompsat2/3(0.7 m)、Plelades(0.7 m)、GeoEye-1(0.5 m),以及我國研發的高景衛星(SuperView-1/2),這些衛星的分辨率都是亞米級的。Liu 等[71]利用哨兵-1 號雷達資料研究新疆鞏乃斯的雪崩堆積時就利用高景1號衛星影像對監測結果進行了驗證。如果把雷達和光學傳感器組合起來形成一個組合傳感器,不但可以使雪崩觀測記錄更加連續,還可以克服雷達影像出現的頂底倒置以及透視收縮等問題。
5.2 雪崩堆積的自動監測算法
利用已有的光學或雷達影像對小范圍或某特定溝槽的雪崩進行遙感影像的人工判讀是比較容易的,但是對于大范圍的雪崩遙感影像進行人工判讀往往費時費力,達不到實時監測的效果,在雪崩高發周期內往往對雪崩的預測預警貢獻不大。因而雪崩遙感影像的實時計算機判讀及其判讀算法的研究就顯得非常必要。
掩膜技術是自動監測中最常用的工具,比如坡度掩膜可以大大減少自動監測的工作量。根據Mc-Clung 等[6]的研究,雪崩堆積區的坡度一般在15°以下,一般認為大于35°的地形就不會產生雪崩堆積[16]。地形及障礙物對不同雪崩制動作用不同,粉狀雪崩的雪崩云主要的阻力來自空氣,密實流層的阻滯主要受地表摩擦和地形的影響,如雪崩溝槽出現轉彎,密實流受離心力作用常常會出現彎道超高從而堆積在溝槽的外圍。統計顯示,在相同的坡度和雪崩量的前提下,溝槽雪崩比坡面雪崩運動速度更快、距離也更遠。濕雪雪崩由于雪崩流含水量高,更多地呈現出流體的性質向低處填洼,運動速度慢,但運動距離遠。對面的山坡和森林都可以對雪崩產生制動作用,其中森林對雪崩的制動與樹木的間距和高度有關,當雪崩規模較大時,雪崩可能會躍過或摧毀森林繼續前進。利用ArcGIS軟件,采用掩膜的方法可以對坡度大于40°、密林以及開闊水體進行剔除[104]。在光學遙感的雪崩堆積監測中,一般采用雪崩堆積與周圍環境的亮度、紋理等物理特征對遙感影像進行分類。
對雷達遙感圖像來說,雪崩堆積與周圍環境影像的后向散射以及相干性會產生明顯的差異。Vickers 等[106,108]和Eckerstorfer 等[95,107,114]給出了利用動態閾值來進行監測的方法。在下載數據經過前期掩膜、地理編碼以及地形校正后獲得升軌和降軌像對,以500×500像元輸入,經過高斯函數差分濾波(difference of Gaussians,DOG)以及K 均值聚類方法可以得到雪崩像元的二元近實時監測圖。最重要的濾波步驟是對經過垂直極化和交叉極化后雪崩前后的影像相減,求得后向散射差值影像ΔHH和ΔHV,然后進行高斯函數差分濾波(DOG),濾波的目的是增加后向散射的空間變化梯度,增強的后向散射空間梯度更容易確定雪崩堆積的邊界。對濾波后的影像根據均值μ和標準差SD 選取兩個閾值μ+1.5SD 和μ+2.5SD,對圖像進行差值處理,選取的閾值越高,得到的像元雪崩的可能性越大。分級步驟是對VV 和VH 兩種極化通道獲取的圖像分成N個等級,計算雪崩發生前后和參考影像等級的差值。然后選取差值的閾值,使得大于閾值的像元為雪崩像元,小于閾值的為無雪崩像元,從而得到雪崩像元分布圖。Vickers 等[106,108]認為分成6 級最為理想,不但可以反映等級的變化,而且其數據計算量適中,可以獲取接近實時的雪崩監測圖。Eckerstorfer 等[114]采用這種方法對挪威北部的雪崩進行了自動監測,最大的準確率達到了85%,錯誤率24.9%,算法的可靠性較高。
Yang 等[115]采用支持向量機(Support Vector Machine, SVM)方法對雪崩前后的極化熵、相干性以及后向散射等各種參數進行分類來制作雪崩的分布圖,也取得了較好的自動監測結果。
以上算法都是基于后向散射單一指標來確定某些區域是否發生雪崩。最新的研究進展是在充分考慮像元后向散射的基礎上,還應考慮雪崩堆積的紋理和形狀,以及地形、地表植被等對雪崩識別的影響[71,116]。Liu 等[71]基于多極化哨兵-1 號影像,首先使用H-α 分解技術以及SVM 和邏輯回歸方法對新疆天山山脈的雪崩堆積進行了非監督分類,分類中除后向散射外,還分析了地形和植被參數對分類結果的影響,該方法克服了VV/HH采用固定閾值的缺點[106,117],取得了較好監測結果。Bianchi 等[116]將地形及植被作為影響因子利用全卷積神經網絡技術(fully convolutional network)對挪威北部6 345條已經人工識別的雪崩進行訓練和驗證,其識別準確性的F1得分可以達到0.66。
總體說來,SAR 雪崩監測的自動算法研究目前還處于初級階段,分類的準確性不如人工識別。主要的問題體現在以下幾個方面:
首先,自動算法分類結果的優劣依賴于專家分析,特別是那些地形復雜、人員無法到達的區域,而作為“金標準”的專家分析結果的準確性無法得到驗證;其次,新雪崩堆積疊加在老雪崩堆積體之上時,新的雪崩事件無法確認;第三,風對雪面的侵蝕或風吹雪堆積會造成“相同地物出現不同頻譜”或“相同頻譜對應不同地物”的情形,影響影像分類結果[71];第四,星載傳感器受重訪期影響,對中低緯度地區雪崩無法做到近實時監測;第五,濕雪雪崩向干雪雪崩轉型時,雪崩堆積識別的準確率低;第六,中小規模的雪崩無法通過影像進行識別,使得遙感監測的雪崩數量遠小于實際的雪崩數量。這些問題也是SAR雪崩自動監測研究以后需要改進的方向。
當前雪崩的遙感監測研究主要集中在雪崩的堆積區,因為雪崩形成區和流通區難以到達,遙感監測研究工作開展不多。雪崩形成區(釋放區)積雪的各種性質和幾何參數及其變化可以通過遙感手段進行監測[118-119],這些參數包括:積雪密度、深度、粒徑和含水量等。這些參數是雪崩的第二類預測因子,其重要性要高于氣象氣候因子[6]。如果能獲取高分辨率的近實時參數,對于雪崩的預測預警無疑具有非常重要的意義[120]。
6 藏東南雪崩監測
6.1 藏東南雪崩的基本特征
藏東南是我國雪崩分布廣泛而且危害嚴重的地區,雪崩主要分布于318 國道的安久拉至通麥路段、扎墨(波密扎木—墨脫)公路的嘎隆拉隧道兩側、派墨公路的多雄拉隧道東側以及察隅公路的部分地區。藏東南雪崩以濕雪雪崩為主,多發生在2—4 月,這一時期的降雪較多,為濕雪雪崩的發生提供了豐富的物源。同時,這一時期氣溫的回升也比較強烈,產生的融水或者降雨都會成為濕雪雪崩暴發的誘發因素。王彥龍[121]的實地觀測發現,318國道83 道班附近的最大積雪厚度一般都在1.5 m以上,而扎墨公路嘎龍寺春季的積雪厚度一般都超過2 m。雖然藏東南的氣象觀測較少,但從積雪厚度可以推斷,這一地區尤其扎墨公路和察隅公路的降雪量是相當大的。由于藏東南春季雪崩周期內降雪多,陰天、雨雪天以及霧天也相應較多,受天氣因素影響較為嚴重的光學傳感器,無論搭載在哪種平臺之上,都不適宜作為主要的傳感器來監測這一地區的雪崩活動,但可以作為輔助的監測手段來驗證其他傳感器監測的結果。
根據藏東南的氣象條件,利用星載SAR 進行雪崩監測成為首選。因為雪崩發生在氣溫回升的春季,降雨和雪面融水下滲可能是雪崩活動增加的主要因素。在雪面水分增加時,后向散射由體散射迅速向大氣-雪面散射轉化,散射值會呈現明顯的變化,在雪崩暴發前就可以利用C 波段SAR 的交叉極化判別危險雪體的干濕變化[93]。藏東南的雪崩具有濕雪雪崩的運動及堆積特點,如雪崩運動速度較慢,雪崩運動時常攜帶大量的固體物質,使得雪崩堆積一般呈暗色甚至黑色,雪崩堆積體表面的粗糙度較大(圖3),這些變化都對雪崩的遙感判讀非常有利。Wesselink 等[117]和Eckerstorfer 等[112]的研究表明,后向散射對高密度以及表面粗糙度較大的雪面非常敏感,雖然其中的具體機理還有待進一步的研究。根據Vickers 等[108]的研究,散射閾值分類方法在雪崩從干雪向濕雪轉化時,雪崩堆積判讀的準確率只有50%,而在從干雪向濕雪轉化時,判讀的準確率可以達到90%,藏東南雪崩周期剛好從干雪向濕雪轉化,因而星載SAR 非常適合在藏東南進行雪崩監測。在星載雷達中,RS-2U 和哨兵-1 號是兩種重要選項,哨兵-1 號是一種免費的雷達影像(表1),但哨兵-1 號空間分辨率較低,對一級到三級的小型雪崩無法判別,中型雪崩判讀的概率也不高,加之其在中低緯度的重訪期為12天,而藏東南春季降雪頻率較高、降雪量大,如果雪崩堆積被新降濕雪覆蓋以及風吹雪平滑,哨兵-1 號重訪時可能無法觀測到已經發生的雪崩,造成雪崩觀測的漏測。RS-2U 空間分辨率3 m×3 m,重訪期1 天,可以滿足藏東南雪崩監測的要求。

圖3 藏東南雪崩堆積的表面形態:扎墨公路52K,2020年3月16日(a);牛踏溝2020年4月4日(b)Fig. 3 The form of avalanche deposit over the Southeastern of Qinghai-Xizang (Tibet) Plateau: 52K of Zhamu-Motuo Highway, 2020-03-16(a); Niutagou, 2020-04-04 (b)
6.2 藏東南雪崩觀測的基本思路和方法
藏東南雪崩長期觀測站的基本定位是通過實地試驗、長期定點觀測以及遙感手段相結合的方法,研究這一地區雪崩的啟動、運動、攜帶以及沉積等動力學過程,在一定數據支撐的基礎上,研發和改進這一地區的動力學模型和統計模型,并在實際中進行雪崩的危險性分析和風險評價;在收集大量訓練數據的基礎上,建立這一地區雪崩的預警系統,并為公路管理、爆破除雪以及工程治理提供依據。
實地觀測最核心的步驟是選擇不同海拔不同朝向的潛在不穩定積雪測量雪體的機械力學性質,進行雪體試驗獲取雪體的穩定性,結合小尺度或降尺度臨近天氣預報揭示雪體穩定性的變化規律,利用雪崩概念模型[122],預測雪崩發生的可能位置、海拔以及雪崩規模,并利用微信公眾號或地方電視臺實時向公眾發布雪崩危險等級預報。經筆者現場調查,扎墨公路的24K 嘎龍寺附近有較為舒緩的山間盆地,隧道修建以前的老公路可以到達海拔較高的山脊部位,人員易于攀登,是比較良好的雪層剖面觀測場所,可以選為長期的雪崩試驗場所,進行多種雪體試驗(圖4)。足夠多的不同坡度、坡向、海拔的雪體試驗很容易發現某個時刻的雪體穩定性規律[123]。

圖4 各種雪體試驗Fig. 4 Snowpack tests: hand shear test (a); rutschblock test (b); extended column test (c); shear frame test (d)
研究區域的選擇在嘎隆拉隧道上方的溝槽,最高海拔4 569 m,最大雪崩形成區下緣海拔4 418 m。形成區坡度35.8°,包含三個潛在雪崩釋放區。通過架設不同的傳感器測量不同的雪崩參數(圖5),其中:用高度20 m 桅桿在不同高度架設壓電開關、光電傳感器測量雪崩流高度、密度和速度剖面[124-126]。因為儀器測量為介入式觀測,利用懸臂可以最大限度減少儀器對雪崩流的影響。此外還可以測量雪崩流沖擊下承載體的形變[28],進一步還可以研究雪崩流與人工建筑之間的相互作用,如利用6.5 m 的窄楔(narrow wedge)測量雪崩流的沖擊力以及窄楔所受應力的9 個分量[127],這些數據都是雪崩工程設計最基礎的參數。數據采集系統設計中,沖擊力、運動速度和雪崩流高度的取樣頻率一般應在2 000 Hz以上。

圖5 嘎隆拉隧道雪崩觀測點的Google Earth地圖Fig. 5 The Google Earth map of the Galongla avalanche test site
地震傳感器(地震檢波器)選擇沿雪崩路徑布設;次聲傳感器以陣列的形式將4 個傳感器布設在堆積區附近的平緩區域,四個傳感器兩兩相距30~50 m。
遙感觀測方面,根據藏東南地形高差大、降雪量大以及多濕雪雪崩的特點,擬以RS-2U 影像為主要監測傳感器進行監測,并以哨兵-1 號雷達影像、快鳥或高景-1 光學影像進行結果的檢驗和驗證。其具體操作步驟按Wesselink 等[117]的方法執行。首先是數據前處理,包括各種影像數據的下載、投影坐標系的轉換、2×2 像素平滑消除斑紋、圖像轉換成GeoTIFF 格式等。第二步,利用掩膜將<5°和>55°的不可能發生雪崩堆積的地形排除;5°和55°這兩個閾值的選取符合雪崩的運動規律,McClung等[6,94]將雪崩形成區始發點和雪崩堆積區最遠點的連線與水平線的夾角定義為α[94],他發現百年一遇的大雪崩α在15°~50°之間波動,在這個角度之外幾乎很少有雪崩活動。根據Johnston 等[128]和Delparte 等[129]的統計,大多數雪崩的α值介于20°~40°之間。流通區平均坡度介于30°~15°之間,因為雪崩的動能未能全部耗散,沖擊力較大,不會有較大粒徑的礫石停留,也不會有樹齡長的喬木生長。樹齡較長的樹木一般都出現在堆積區的遠端,這些樹木因為受到雪崩的沖擊產生樹木年輪的異常生長或者疤痕,從而成為歷史大雪崩定年的證據[130]。第三步,利用超寬帶測繪帶模式(S-1A extra-wide swath mode,S-1A EW)的哨兵-1A 影像或者RADARSAT-2 的超精細模式(RS-2 ultrafine mode)生成RGB 圖像。S-1A EW 的特點是覆蓋范圍大、重訪期短,其中紅色和藍色通道為無雪崩活動的參考圖像,綠色通道為有雪崩圖像,在合成圖上,綠色一般為雪崩堆積。第四步,雪崩堆積的人工識別,雪崩堆積在雷達影像上一般呈綠色舌狀,并向下延伸,在高分辨率的RS-2U圖像上很容易辨識,通過對已發生雪崩堆積的判讀,可以建立雪崩堆積后向散射的一組閾值,并制作閾值直方圖。為了保證閾值的準確,在判讀雪崩影像時一般由兩名雪崩研究專業人員共同完成。濾波時閾值選取有固定閾值和動態閾值兩種方式,Wesselink 等[117]采用3 db、Karbou 等[131]、Leinss 等[91]采用4 db、Vicker 等[106]采用6 db 的固定值,發現參考影像為濕雪時分類結果不好。在參考影像為干雪時,雪崩暴發前的氣象狀況也會對雪崩堆積的分類產生影響[132]。為了提高分類的準確性,Tompkin等[1]考慮了局地亮度對后向散射的影響,在計算后向散射時進行了局地分辨率權重的多視處理,采用了1.91 db的閾值進行分類,使得召回率和準確率都有了顯著的提高。Eckerstorfer 等[114]采用動態閾值,即后向散射μ+1.5SD 和μ+2.5SD 兩種閾值,發現高閾值(2.5SD)的K 均值聚類的分類效果更好。取值過高,有些雪崩堆積有可能沒有被統計在內;取值過低,有些不是雪崩堆積的區域可能被統計進來。第五步,對無雪崩發生的參考圖像和有雪崩發生的圖像進行5×5 像素中值濾波以消除斑紋。第六步,以雪崩活動的后向散射影像減去無雪崩活動的參考影像生成后向散射變化影像。第七步,生成雷達入射角度、頂底倒置以及雷達陰影等不可能發生雪崩的掩膜,以剔除部分地形影響。第八步,對監測影像使用各種掩膜及散射變化閾值,生成雪崩和無雪崩的二元像素分類。第九步,使用去除小斑塊RSO濾波器(Remove Small Objects filter),根據影像分辨率,濾除確定雪崩堆積邊界的不規則像元。第十步,采用自適應濾波將具有相同性質的像元連接起來,生成雪崩和無雪崩的二元影像圖(圖6)。

圖6 藏東南雪崩自動監測流程圖Fig. 6 The workflow of avalanche automatic detection over Southeastern of Qinghai-Xizang (Tibet) Plateau
當前藏東南的雪崩遙感監測研究還很少,因而很多方法和技術都可以進行嘗試并加以檢驗,如在圖像的識別中有監督分類的支持向量機和卷積神經網絡相對于K 均值聚類有更高的分類精度,變化的閾值相對于固定的閾值更能提高雪崩堆積識別的準確率,升軌和降軌影像的相互印證更有利于消除地形及雷達陰影的影響,多軌道和多種極化方式的共同使用可以有效減小斑點噪聲的影響。
星載雷達影像在獲取雪崩信息后,一般還需要進行檢驗,測試雷達影像監測雪崩的準確度以及錯誤率等參數。在可到達的區域可以采用人工直接進行檢驗,而在人員無法到達的區域,可直接借用其他雷達影像如哨兵-1 號進行檢驗,或者利用高分辨率的光學影像進行檢驗,如Bühler 等[20]、Leinss等[91]采用SPOT6/7 光學影像觀測的雪崩活動作為標準來檢驗雷達影像的準確性,而Lato 等[17]則利用快鳥影像作為無法直接觀測地區雪崩發生的標準。SPOT6/7 全色和多光譜的分辨率分別為1.5 m 和6 m,而快鳥則分別達到了0.6 m和2.4 m。
LiDAR 可以用于制作8、9 月雪崩前期DEM,航空LiDAR(直升機或飛機)技術不需要控制點,可以觀測較大空間尺度的處于雪崩臨界點的積雪深度,而且觀測精度較高。
7 結論
雪崩監測是雪崩研究最為基礎的內容,當前主要分為定點監測和遙感監測,這兩種方法實現的功能相互交叉又各有側重。如果將雪崩按發生的順序分為雪崩前、雪崩中和雪崩后,則不同方式的遙感在雪崩發生的前、中、后發揮著不同的作用。積雪剖面觀測和積雪試驗可以提供雪崩暴發前雪崩形成區積雪的機械物理性質(如層理等)和穩定性狀況(如裂紋擴展)信息,這兩類信息結合準確的臨近天氣預報可以預測1~2 日內局地雪崩發生的位置、規模和概率。而定點長期觀測則是利用架設在雪崩路徑上的各種儀器觀測雪崩發生過程中的運動學特征,獲取的前鋒速度、沖擊力和雪崩流高度等高頻數據可以為雪崩動力學模型和工程防治提供基礎參數。遙感監測則主要側重于對雪崩發生后雪崩堆積的監測,其監測的雪崩運動距離、雪崩量等數據是雪崩風險評價和土地利用規劃的基礎。
筆者著重對雪崩的遙感監測進行了綜述。雪崩遙感按傳感器分為光學、LiDAR 和雷達三種類型,按平臺分為地基、航空和航天三種類型。各個傳感器和平臺都有自身的特點:光學遙感價格低廉,影像直觀;LiDAR 最適合進行雪深觀測;而雷達不受天氣因素影響。地基平臺的遙感可以對重點位置或溝槽的雪崩進行加密觀測;機載平臺的雪崩遙感不受時間限制,觀測無死角;而星載的雪崩遙感觀測范圍大,可以對雪崩進行周期性連續觀測。平臺和傳感器的兩兩組合構成了雪崩遙感的基本框架。
遙感監測也有其自身的局限性:高分辨率的遙感影像通常幅寬較小,而且通常價格較高,較大空間尺度的遙感影像人工識別的工作量較大,需要開發自動監測算法。
藏東南是我國雪崩高發區域,利用搭載在衛星上的SAR 預計可以獲得較好的觀測效果,并可以采用天氣狀況良好時的高分辨率光學衛星影像進行驗證。
實地觀測是獲取藏東南的積雪特征和主要運動參數的合理手段,但如何選取理想的觀測點是觀測的難點之一,經現場勘查,嘎隆拉隧道附近是較為理想的建站場所。