基于GA-BP神經(jīng)網(wǎng)絡(luò)的汽車潤滑系統(tǒng)中磨粒分類的研究
2024-01-19 08:47:06王飛何磊張恩亮方宇
長春工程學(xué)院學(xué)報(自然科學(xué)版) 2023年4期
王飛,何磊,張恩亮,方宇
(1.安徽職業(yè)技術(shù)學(xué)院 汽車工程學(xué)院,合肥 230011; 2.安徽農(nóng)業(yè)大學(xué) 經(jīng)濟技術(shù)學(xué)院,合肥 230036 )
0 引言
在汽車潤滑系統(tǒng)中,磨粒通常是由于金屬機件的磨損和顆粒物質(zhì)的存在產(chǎn)生的[1]。通過分析磨粒可以了解汽車潤滑系統(tǒng)的運行狀態(tài)是否會出現(xiàn)故障,以及可能出現(xiàn)的故障類型[2]。由于磨粒的幾何特點與表征受磨粒產(chǎn)生原因的影響,因此深入研究磨粒的形態(tài)特點與表征[3],可以對磨粒進行準確分類。
在早期的研究中,關(guān)于磨粒的辨認主要由鐵譜研究領(lǐng)域的專家進行,由于人工分析圖像耗時耗力,并且分析結(jié)果存在差異性,因此,對于鐵譜圖像的研究傾向于采用自動化識別的方法[3]。BP(Error Back Propagation Training)[4]也被叫作誤差反向傳播算法,BP神經(jīng)網(wǎng)絡(luò)可以對一些復(fù)雜模型進行分類,并將特定的參數(shù)賦予網(wǎng)絡(luò),可對網(wǎng)絡(luò)訓(xùn)練后的參數(shù)初始化,是一種更新迭代訓(xùn)練網(wǎng)絡(luò)的方法。遺傳算法(Genetic Algorithm GA)[5]是仿效《物種起源》中優(yōu)勝劣汰的理論而設(shè)計的一種機器計算模型樣式。“遺傳”二字,來源于生物在繁殖過程中每一代都會通過上一代傳遞和繼承一部分基因及特征。在GA-BP神經(jīng)網(wǎng)絡(luò)遺傳算法中,“遺傳”主要表現(xiàn)在算法對神經(jīng)網(wǎng)絡(luò)權(quán)值和結(jié)構(gòu)的搜索和優(yōu)化過程上。通過模擬生物的遺傳和進化過程,算法可以在較大的解空間中全局搜索,同時也可以根據(jù)問題的特性自適應(yīng)地調(diào)整搜索策略,從而找到最優(yōu)的網(wǎng)絡(luò)權(quán)值和結(jié)構(gòu)。GA-BP神經(jīng)網(wǎng)絡(luò)綜合了遺傳算法和BP神經(jīng)網(wǎng)絡(luò)算法的各項優(yōu)勢,能夠通過優(yōu)化學(xué)習率、權(quán)重和閾值等參數(shù),提高網(wǎng)絡(luò)的分類精度[6]。因此,本文采用基于GA-BP神經(jīng)網(wǎng)絡(luò)的自動識別方法,針對汽車潤滑系統(tǒng)中磨粒的分類問題進行了深入研究。
本文通過對比不同磨粒的特征,將磨粒的外形特征作為函數(shù)的輸入,由GA-BP神經(jīng)網(wǎng)絡(luò)的反饋調(diào)節(jié)來逐步減少誤差值,使得輸出在一定閾值,通過3次映射關(guān)系訓(xùn)練GA-BP神經(jīng)網(wǎng)絡(luò),從而得到一個能準確識別磨粒種類且對硬件要求較低的神經(jīng)網(wǎng)絡(luò),GA-BP神經(jīng)網(wǎng)絡(luò)能夠滿足汽車潤滑系統(tǒng)中磨粒分類檢測的準確性和高效性的需求。
1 BP神經(jīng)網(wǎng)絡(luò)模型
1.1 構(gòu)建BP神經(jīng)網(wǎng)絡(luò)
BP神經(jīng)網(wǎng)絡(luò)算法計算網(wǎng)絡(luò)誤差平方最小值應(yīng)用的是梯度下降法,其中的目標函數(shù)為網(wǎng)絡(luò)誤差平方。在BP神經(jīng)網(wǎng)絡(luò)中,通過復(fù)雜的非線性關(guān)系和簡單的訓(xùn)練學(xué)習可以有效地把識別出的5組典型粒子分為:摩擦、切割、球形、疲勞和嚴重滑動。
BP神經(jīng)網(wǎng)絡(luò)包含輸入層神經(jīng)元個數(shù)、隱藏層神經(jīng)元個數(shù)和輸出層神經(jīng)元個數(shù),通過神經(jīng)元計算權(quán)值連接。BP神經(jīng)網(wǎng)絡(luò)通過標記樣本訓(xùn)練網(wǎng)絡(luò),使得輸出值和期望值間的差值在設(shè)定的可控的范圍內(nèi)。當隱藏層神經(jīng)元的個數(shù)h滿足h=0.5(m+n)+a(a=1,2,3,…,10)時,其中輸入層神經(jīng)元的個數(shù)和輸出層神經(jīng)元的個數(shù)依次為m、n,由柯爾莫戈洛夫定理可知,3層神經(jīng)網(wǎng)絡(luò)可以準確地實現(xiàn)任何連續(xù)映射,達到訓(xùn)練網(wǎng)絡(luò)識別汽車潤滑系統(tǒng)中磨粒種類的目的。
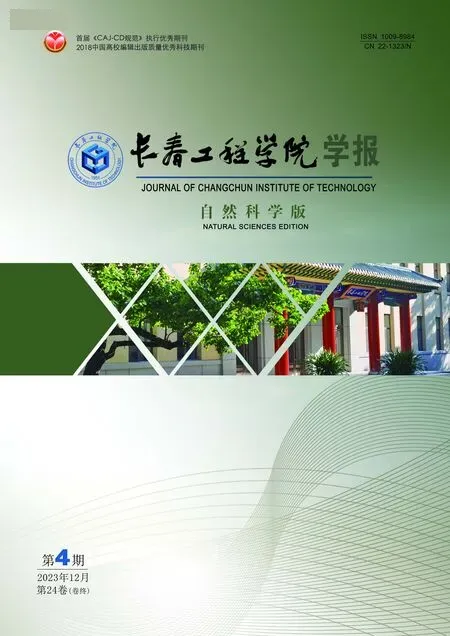
BP神經(jīng)網(wǎng)絡(luò)模型如圖1所示,可知將圖像數(shù)據(jù)輸入至輸入層,通過輸入層與隱藏層間的神經(jīng)元計算權(quán)值,再把權(quán)值作為輸入傳遞至隱藏層,經(jīng)過隱藏層和輸出層間的神經(jīng)元最終計算出圖像數(shù)據(jù)的輸出閾值。
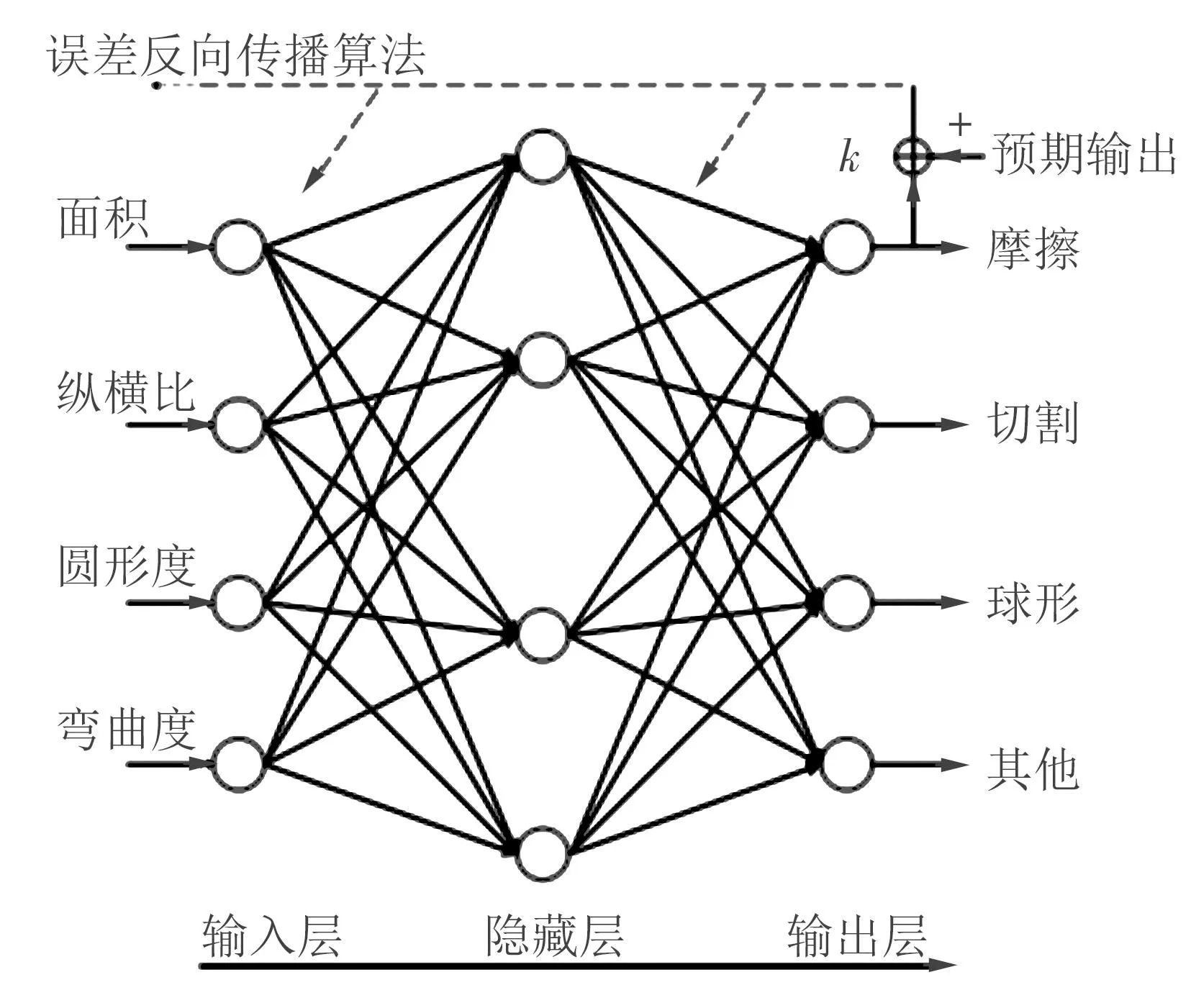
圖1 BP神經(jīng)網(wǎng)絡(luò)模型
具備強大的學(xué)習能力是神經(jīng)網(wǎng)絡(luò)最大的特點,通過網(wǎng)絡(luò)學(xué)習可逐步實現(xiàn)降低輸出值和期望值的誤差。BP神經(jīng)網(wǎng)絡(luò)是非線性的系統(tǒng),通過輸入層信息與輸出層信息的映射關(guān)系將結(jié)果輸出,而權(quán)值以及閾值間的持續(xù)更正是網(wǎng)絡(luò)學(xué)習的實質(zhì),因此將調(diào)整后的權(quán)值及閾值再次輸入至輸入層,網(wǎng)絡(luò)訓(xùn)練后會對權(quán)值及閾值做出調(diào)整,降低試驗誤差。
1.2 BP神經(jīng)網(wǎng)絡(luò)算法
通過適當設(shè)置隱藏層神經(jīng)元的數(shù)量,可以建立從輸入(磨粒參數(shù))到輸出(磨粒類型)的非線性映射關(guān)系。具體程序描述為
1)在初始化過程中將權(quán)重值和閾值用隨機值連接。
2)通過被選擇的輸入(磨粒參數(shù))及輸出模式中某參數(shù),計算隱藏層及輸出層中各個單元的輸出。
3)用公式(1)~(4)計算新的連接權(quán)重和閾值:
θk(t+1)=θk(t)+ηtσk,(t=1,2,…,p;k=1,2,…,l),
(1)
βj(t+1)=βj(t)+ηtσj,(t=1,2,…,p;j=1,2,…,m),
(2)
式中ηt為第t次訓(xùn)練迭代,σk為輸出層第k個節(jié)點的誤差,θk為輸出層第k個神經(jīng)元的閾值,σj為隱藏層第k個節(jié)點的誤差,βj為隱藏層第k個神經(jīng)元的閾值。
ωjk(t+1)=ωjk(t)+Δωjk(t),(t=1,2,…,p),
(3)
vij(t+1)=vij(t)+Δvij(t),(t=1,2,…,p),
(4)
式中t為訓(xùn)練迭代次數(shù),ωjk為從隱藏層到輸出層的權(quán)值,vij為從輸入層到隱藏層的權(quán)值。
將式(4)權(quán)值初始化,重新執(zhí)行第2步,再次訓(xùn)練神經(jīng)網(wǎng)絡(luò),直到網(wǎng)絡(luò)的輸出均方誤差(MMSE)達到一定范圍或者迭代到一定次數(shù),見式(5):
(5)
式中Ai為樣本經(jīng)過隱藏層處理后的實際輸出,Ti為期望輸出,N為樣本數(shù)量。MMSE作為調(diào)整連接各層權(quán)值、閾值的關(guān)鍵因素,反復(fù)對網(wǎng)絡(luò)初始化訓(xùn)練,直到MMSE收斂。
總之BP神經(jīng)網(wǎng)絡(luò)通過正向傳播和反向傳播學(xué)習,完成算法數(shù)據(jù)學(xué)習和特征選取工作,由此建立自己的學(xué)習規(guī)則。BP神經(jīng)網(wǎng)絡(luò)能夠訓(xùn)練學(xué)習大量的樣本,泛化能力極強,對于學(xué)習過的網(wǎng)絡(luò),其不僅可以對當前數(shù)據(jù)樣本進行預(yù)測分析,還可以對新的數(shù)據(jù)樣本作出預(yù)測判斷。對于待學(xué)習的樣本需要自行標注并一一對應(yīng)。
在設(shè)置網(wǎng)絡(luò)參數(shù)時,需要設(shè)置網(wǎng)絡(luò)的學(xué)習率,若設(shè)置的學(xué)習率過大,網(wǎng)絡(luò)可能會出現(xiàn)不收斂或者大幅振動的現(xiàn)象;若設(shè)置的學(xué)習率過小,網(wǎng)絡(luò)的學(xué)習時間將大幅增加。同時網(wǎng)絡(luò)設(shè)置的權(quán)值、閾值不會被網(wǎng)絡(luò)記錄,如果有新的樣本輸入,會導(dǎo)致之前學(xué)習的權(quán)值、閾值重置,影響網(wǎng)絡(luò)學(xué)習效率。本文采用自適應(yīng)學(xué)習率算法,因權(quán)值變化影響學(xué)習率變化,所以可增快模型的收斂速度,進而提高模型效率。BP神經(jīng)網(wǎng)絡(luò)分類模型是采取梯度下降法架構(gòu)的,BP神經(jīng)網(wǎng)絡(luò)E-W曲線如圖2所示。

圖2 BP算法E-W曲線
圖2中W為梯度,E為評估誤差,E-W曲線也被稱為誤差曲線,當圖像斜率較小時,誤差隨權(quán)值變化不明顯,表現(xiàn)為網(wǎng)絡(luò)收斂速度慢或者不收斂,同時圖中存在多個極小值點(A,B,C),會出現(xiàn)網(wǎng)絡(luò)局部極小值,從而限制它,使它無法獲取全局最優(yōu)。
2 改進的BP神經(jīng)網(wǎng)絡(luò)算法
2.1 改進的GA-BP神經(jīng)網(wǎng)絡(luò)算法流程
遺傳算法對BP神經(jīng)網(wǎng)絡(luò)的改進主要包含3部分:明確網(wǎng)絡(luò)拓撲結(jié)構(gòu)、優(yōu)化閾值及權(quán)值、執(zhí)行遺傳操作。改進的GA-BP神經(jīng)網(wǎng)絡(luò)流程圖如圖3所示。

圖3 改進的GA-BP神經(jīng)網(wǎng)絡(luò)流程圖
2.2 優(yōu)化拓撲結(jié)構(gòu)和權(quán)值閾值
首先通過Newff()函數(shù)對網(wǎng)絡(luò)進行BP神經(jīng)網(wǎng)絡(luò)構(gòu)架,將輸入層數(shù)據(jù)、隱藏層數(shù)據(jù)以及輸出層數(shù)據(jù)進行歸一化處理,把經(jīng)過處理的數(shù)據(jù)作為參數(shù)傳遞給Sigmoid函數(shù),并將該函數(shù)的輸出結(jié)果映射到一個特定的區(qū)間范圍內(nèi)。由于Sigmoid函數(shù)值域為0~1,因此可以將Sigmoid函數(shù)作為輸出函數(shù),“0”為“神經(jīng)元抑制”,“1”為“神經(jīng)元興奮”。把Newff()函數(shù)訓(xùn)練神經(jīng)網(wǎng)絡(luò)時所需要的輸入作為測試集,再把測試集數(shù)據(jù)當成輸入對網(wǎng)絡(luò)進行測試,從而確定網(wǎng)絡(luò)的可行性。測試集的輸入、輸出參數(shù)需要在網(wǎng)絡(luò)初始化后進行隨機排列,最后做歸一化處理。
BP神經(jīng)網(wǎng)絡(luò)的閾值和權(quán)值決定著網(wǎng)絡(luò)最終的誤差,為了減少誤差,增加網(wǎng)絡(luò)的精確度,使用遺傳算法對閾值和權(quán)值進行優(yōu)化。遺傳算法中使用適應(yīng)度函數(shù)衡量個體的適應(yīng)程度,高適應(yīng)度的個體遺傳可能性更高,低適應(yīng)度的個體遺傳可能性更低。本文所選用的適應(yīng)度值是均方誤差(MMSE)的倒數(shù)。編碼構(gòu)建從輸入層到隱藏層的連接權(quán)值、從隱藏層到輸出層的連接權(quán)值、a2+b2=c2隱藏層閾值以及輸出層閾值。其構(gòu)建的編碼作為函數(shù)的輸入,再將網(wǎng)絡(luò)的期望值與測試值做差取倒數(shù)作為函數(shù)的輸出。其計算公式為
(6)
式中f(i)為第i個神經(jīng)元的適應(yīng)度值,MMSEi為第i個個體實際輸出(Ai)與期望輸出(Ti)的均方誤差。經(jīng)歷14個epoch迭代后,BP神經(jīng)網(wǎng)絡(luò)的適應(yīng)度曲線走向緩和。BP神經(jīng)網(wǎng)絡(luò)和GA-BP神經(jīng)網(wǎng)絡(luò)算法分類的適應(yīng)度值曲線如圖4所示。
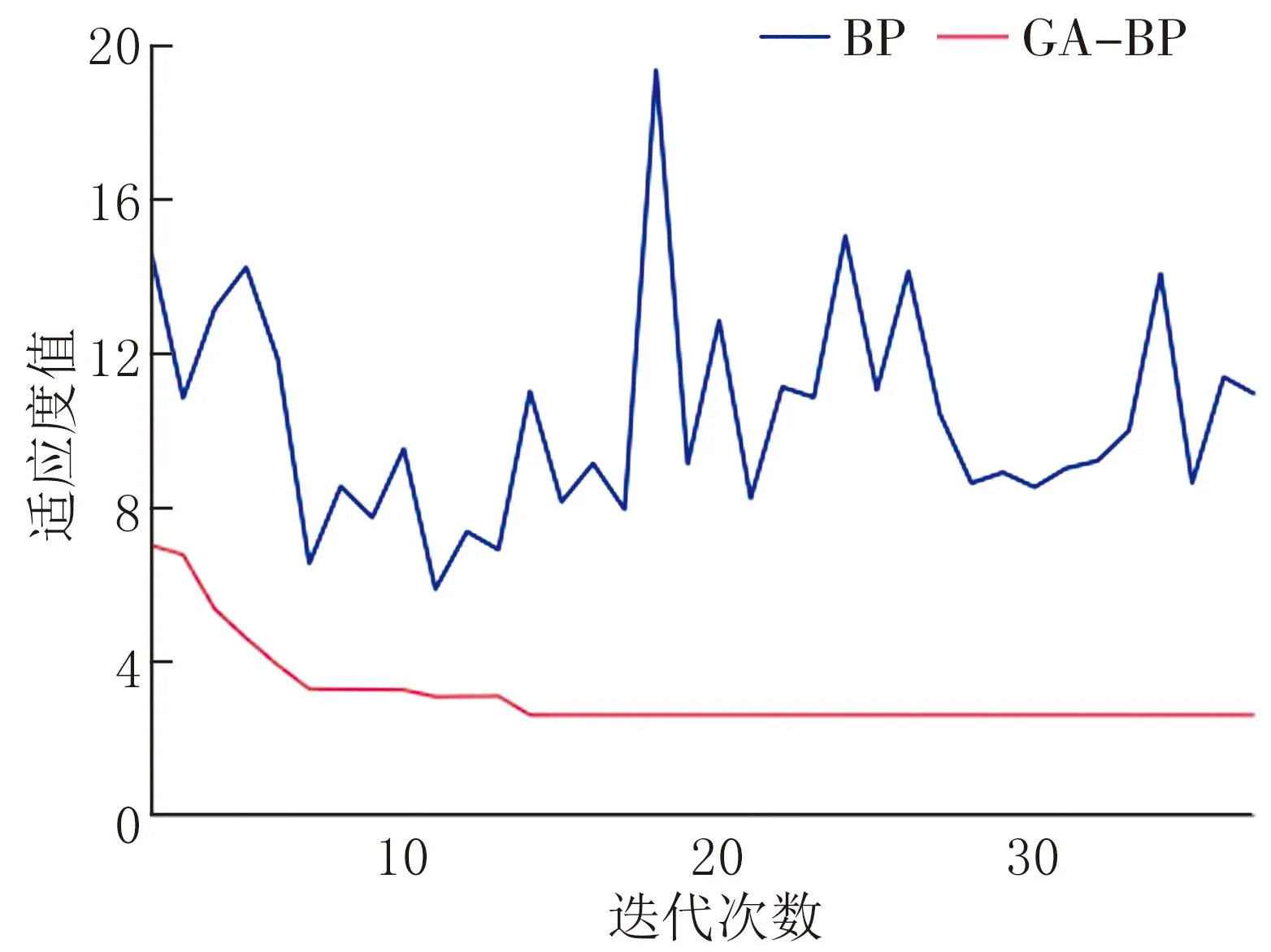
圖4 適應(yīng)度值曲線
2.3 執(zhí)行遺傳操作
搭建GA-BP神經(jīng)網(wǎng)絡(luò)適應(yīng)度曲線的目的在于訓(xùn)練網(wǎng)絡(luò)得到閾值和權(quán)值的最優(yōu)解。首先對迭代次數(shù),學(xué)習率,輸入、輸出層權(quán)值、閾值數(shù)據(jù)和隱藏層閾值數(shù)據(jù)進行歸一化處理,再將數(shù)據(jù)重新組合得到的數(shù)據(jù)以及測試集數(shù)據(jù)編碼作為輸入,將最優(yōu)個體(權(quán)值、閾值最優(yōu))最優(yōu)適應(yīng)度值作為函數(shù)的輸出,得到的最優(yōu)個體如圖5所示。
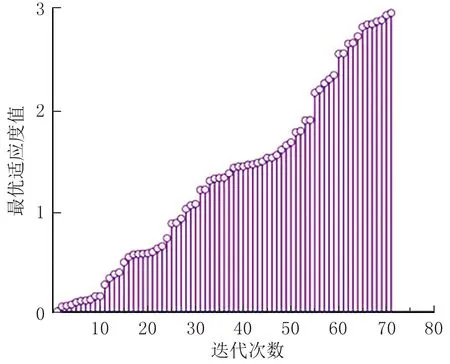
圖5 最優(yōu)個體
對最優(yōu)個體進行排序,將前40個最優(yōu)個體作為輸入層與隱藏層之間的權(quán)值,將第41~55個作為隱藏層節(jié)點的閾值,隱藏層至輸出層的權(quán)值選用第56~70個,輸出節(jié)點閾值選用第71個,其中將計算所得到的權(quán)值及閾值輸入至GA-BP神經(jīng)網(wǎng)絡(luò),再進行網(wǎng)絡(luò)訓(xùn)練,經(jīng)歷連續(xù)的訓(xùn)練使得網(wǎng)絡(luò)最終的權(quán)值及閾值最優(yōu)。GA-BP神經(jīng)網(wǎng)絡(luò)最終的最優(yōu)權(quán)值及閾值見表1。

表1 GA-BP神經(jīng)網(wǎng)絡(luò)的最優(yōu)權(quán)值及閾值
3 試驗設(shè)備及數(shù)據(jù)采集
為了得到大量的試驗數(shù)據(jù),本文使用了BRUKER摩擦磨損試驗機,其通過微機控制步進電機,增添不同模塊來模擬磨粒產(chǎn)生的條件,制作特定的磨損粒子,再對儀器制作的磨損圖像進行手動分類并備注標簽,作為試驗的數(shù)據(jù)集。試驗設(shè)備參數(shù)見表2,磨損試驗機如圖6所示。

表2 試驗所用設(shè)備參數(shù)

(a)摩擦磨損試驗機

(b)旋轉(zhuǎn)驅(qū)動

(c)往復(fù)驅(qū)動

(d) 環(huán)塊驅(qū)動

(e)線性驅(qū)動圖6 BRUKER摩擦磨損試驗機
試驗機擁有4種運動模塊,可以制作出摩擦、磨損和劃痕等多種類型磨損粒子。杰出的模塊化設(shè)計功能能夠同時制作大量磨損粒子樣本。由摩擦磨損試驗機制作的4種典型粒子圖像如圖7所示。

(a)氧化磨損顆粒

(b)切割磨損顆粒

(c)疲勞磨損顆粒
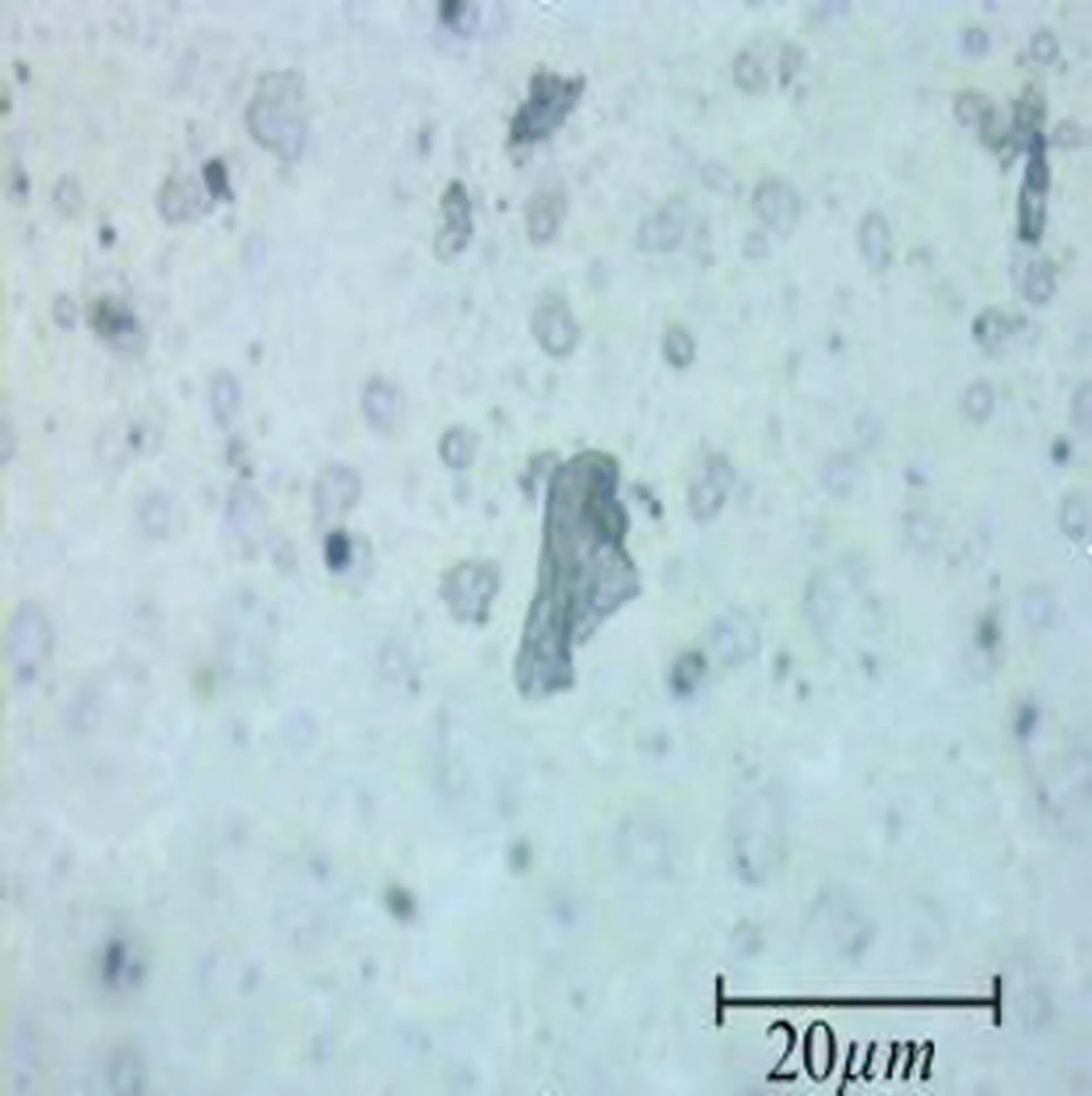
(d)嚴重滑動磨損顆粒圖7 4種典型粒子
由于嚴重滑動磨損顆粒與疲勞磨損顆粒需要對表面信息進行處理才能將二者區(qū)分,本文使用了Contour GT-I 3D光學(xué)顯微鏡,其擁有超強的垂直分辨率,可以掃描500倍的垂直范圍,分辨率達到0.01 nm,可以從樣品的各個角度獲得樣品的表面屬性,它成像功能極佳,可以對于磨粒表面的信息進行提取處理[7]。

圖8 Contour GT-I 3D光學(xué)顯微鏡
4 結(jié)果對比與分析
4.1 算法優(yōu)化對比
在BP神經(jīng)網(wǎng)絡(luò)中神經(jīng)元個數(shù)為5和10時,均方誤差數(shù)量只能達到很低的設(shè)定目標,分別為74%和80%,這是因為網(wǎng)絡(luò)的初始權(quán)值、閾值在MATLAB中是隨機的,初始值設(shè)定不同則網(wǎng)絡(luò)效率不同,在神經(jīng)元個數(shù)為15和20時,均方誤差數(shù)量達到預(yù)設(shè)值,分別為4次和40次,僅達到設(shè)定目標的8%和80%,在神經(jīng)元個數(shù)為15和20時,GA-BP神經(jīng)網(wǎng)絡(luò)幾乎完全達到設(shè)定目標,試驗數(shù)據(jù)見表3。

表3 BP和GA-BP的均方誤差(MMSE)對比
表3的對比結(jié)果表明:隨著隱藏層神經(jīng)元的數(shù)量在GA-BP神經(jīng)網(wǎng)絡(luò)和BP神經(jīng)網(wǎng)絡(luò)中的增加,均方誤差達到設(shè)定值的數(shù)量亦增多,GA-BP神經(jīng)網(wǎng)絡(luò)比BP神經(jīng)網(wǎng)絡(luò)的數(shù)據(jù)迭代次數(shù)越少,越能夠迅速達到設(shè)定的MMSE。
決定系數(shù)(R2)是評判網(wǎng)絡(luò)性能的一個重要參考量,其又叫作擬合優(yōu)度,擬合優(yōu)度愈大,函數(shù)自變量對因變量詮釋的水平愈高;相反,擬合程度低則表示自變量與因變量不存在對應(yīng)關(guān)系。因此對應(yīng)到網(wǎng)絡(luò)中的解釋為擬合優(yōu)度越高,網(wǎng)絡(luò)中的輸入神經(jīng)元與輸出層閾值聯(lián)系越緊密。而調(diào)整決定系數(shù)影響網(wǎng)絡(luò)輸出的精確度。調(diào)整決定系數(shù)是決定系數(shù)的一個調(diào)整版本,是用來衡量模型預(yù)測能力和擬合優(yōu)度的指標,本次調(diào)整決定系數(shù)的方法是增加樣本數(shù)量。R2和調(diào)整R2折線圖如圖9所示。

(a)調(diào)整R2折線圖

(b)R2折線圖圖9 BP神經(jīng)網(wǎng)絡(luò)與GA-BP神經(jīng)網(wǎng)絡(luò)調(diào)整R2與R2的對比折線圖
從擬合度的角度來說,擬合優(yōu)度達到0.8就代表擬合效果不錯。由圖9可知,在隱藏層神經(jīng)元個數(shù)為5、10、15和20時,GA-BP神經(jīng)網(wǎng)絡(luò)的調(diào)整R2與R2值全部大于BP神經(jīng)網(wǎng)絡(luò)對應(yīng)的調(diào)整R2與R2值,表明了GA-BP神經(jīng)網(wǎng)絡(luò)比BP神經(jīng)網(wǎng)絡(luò)的擬合性能更佳。當隱藏層神經(jīng)元個數(shù)較少時,BP神經(jīng)網(wǎng)絡(luò)調(diào)整R2與R2值皆≤50%,GA-BP神經(jīng)網(wǎng)絡(luò)的調(diào)整R2與R2值皆>90%,這說明GA-BP神經(jīng)網(wǎng)絡(luò)的性能更平穩(wěn)。在隱藏層神經(jīng)元的個數(shù)為15時,GA-BP神經(jīng)網(wǎng)絡(luò)同BP神經(jīng)網(wǎng)絡(luò)的擬合值皆達到最優(yōu)狀態(tài),高達97.2%。
因此選用GA-BP神經(jīng)網(wǎng)絡(luò)對數(shù)據(jù)進行擬合預(yù)估分析更合理。
4.2 試驗結(jié)果分析
把汽車4S店維修廠以及試驗室制作的500張磨粒圖片作為訓(xùn)練樣本,為了防止試驗結(jié)果過擬合,將圖片進行旋轉(zhuǎn)、切割、翻轉(zhuǎn)和增加亮度等操作[8],隨機選取其中未擴展的250張圖片作為訓(xùn)練集對BP神經(jīng)網(wǎng)絡(luò)進行訓(xùn)練,其中氧化磨損顆粒90張,切割磨損顆粒30張,圓形磨損顆粒50張,嚴重滑動顆粒20張,疲勞顆粒60張。將剩下未擴展的250張磨粒圖片進行數(shù)據(jù)集增廣,拓展為1 075張,作為試驗集圖片。再對GA-BP神經(jīng)網(wǎng)絡(luò)初始化加入最優(yōu)權(quán)值、閾值,將試驗集圖片的訓(xùn)練結(jié)果畫出混淆矩陣圖(混淆矩陣圖被稱為誤差圖,目的是反映試驗?zāi)P偷臏蚀_率(Accuracy)和召回率(Recall)),如圖10所示。

圖10 GA-BP神經(jīng)網(wǎng)絡(luò)對汽車潤滑系統(tǒng)磨粒分類的混淆矩陣圖
由圖10可知,改良后的BP神經(jīng)網(wǎng)絡(luò)對磨粒分類的準確率(Accuracy)已經(jīng)達到試驗所需的標準,網(wǎng)絡(luò)對氧化磨損顆粒、球形磨損顆粒以及切割磨損顆粒幾乎做到能識別,部分測試集圖片上含有多種磨粒信息,試驗集的圖像在幾何特征以及表面信息方面與真實磨粒極為相似,在不同的磨粒圖片上的分類出現(xiàn)疊加。
在GA-BP神經(jīng)網(wǎng)絡(luò)建成后,將數(shù)據(jù)集分為試驗集和訓(xùn)練集,由訓(xùn)練集確定GA-BP神經(jīng)網(wǎng)絡(luò)隱藏層中的各個參數(shù)閾值,再用添加參數(shù)后的網(wǎng)絡(luò)對試驗集圖像進行分類,將這個模型迭代100次,并將其學(xué)習率設(shè)置為0.01,其中準確率(Accuracy)及學(xué)習損失率(Loss)能夠直接反映出該模型的優(yōu)劣[9]。將數(shù)據(jù)整理做出GA-BP神經(jīng)網(wǎng)絡(luò)的準確率和損失率折線圖,如圖11所示。
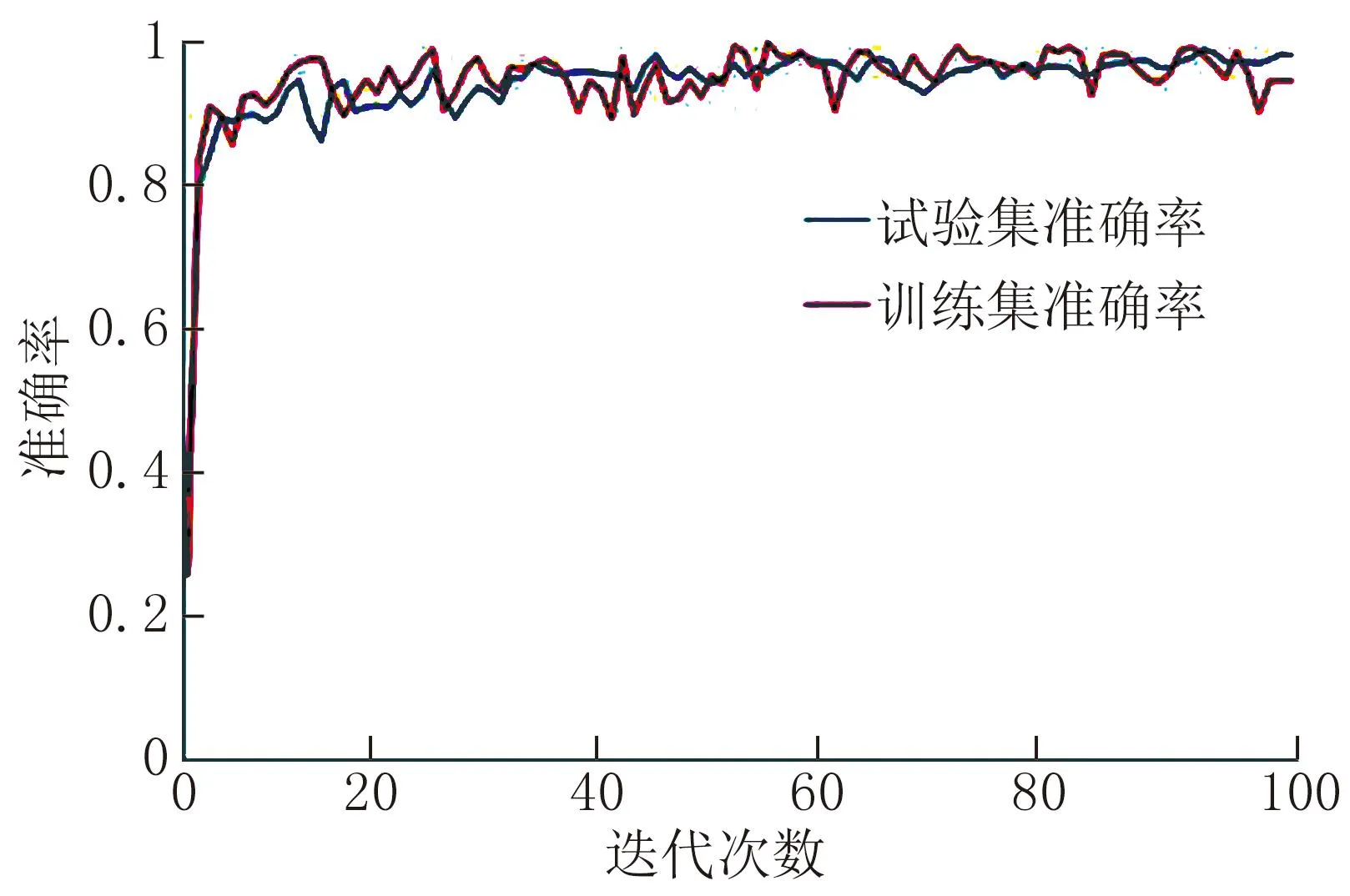
(a)GA-BP的準確率
通過試驗訓(xùn)練可以看出,GA-BP神經(jīng)網(wǎng)絡(luò)的準確率曲線呈收斂狀態(tài),網(wǎng)絡(luò)的損失率很快下降,并在一段時間后逐漸趨于平緩,證明GA-BP神經(jīng)網(wǎng)絡(luò)是能夠?qū)δチ_M行分類的。而且GA-BP神經(jīng)網(wǎng)絡(luò)的學(xué)習速度快,數(shù)據(jù)收斂迅速,準確率高達96.92%。試驗結(jié)果表明,本文提出的方法在磨粒分類方面有較好的表現(xiàn),滿足磨粒分類的準確性和汽車潤滑系統(tǒng)工作效率的雙重需求。
5 結(jié)論
1)本文引入了遺傳算法對 BP神經(jīng)網(wǎng)絡(luò)進行優(yōu)化,試驗結(jié)果表明,GA-BP神經(jīng)網(wǎng)絡(luò)的平穩(wěn)恒定性能更佳,而BP神經(jīng)網(wǎng)絡(luò)的擬合值變化較大,擬合程度較差,運用GA-BP神經(jīng)網(wǎng)絡(luò)初始化的權(quán)值及閾值效果更明顯。
2)BP神經(jīng)網(wǎng)絡(luò)與GA-BP神經(jīng)網(wǎng)絡(luò)隨著隱藏層神經(jīng)元個數(shù)的增加,網(wǎng)絡(luò)達到MMSE設(shè)定值的數(shù)量越多,這說明隱藏層神經(jīng)元的個數(shù)對網(wǎng)絡(luò)訓(xùn)練速度有影響;GA-BP神經(jīng)網(wǎng)絡(luò)比BP神經(jīng)網(wǎng)絡(luò)使用的神經(jīng)元個數(shù)越少,越能快速地達到預(yù)先設(shè)定的目標。
3)提出了基于自適應(yīng)權(quán)值、閾值并結(jié)合了兩次BP神經(jīng)網(wǎng)絡(luò),全面展示了降低誤差、提高準確率的優(yōu)勢,經(jīng)試驗證明GA-BP神經(jīng)網(wǎng)絡(luò)對磨粒分類的準確率高達96.92%。