
裝船設備空氣噪聲測量不確定度的評定
2024-01-19 03:08:36錢文孫成周兆遜開劍高歡
環境技術 2023年12期
錢文,孫成,周兆遜,開劍,高歡
(1.中國船舶集團有限公司第七二三研究所,揚州 225001;2.中國船舶工業電工電子設備環境與可靠性試驗檢測中心,揚州 225001)
引言
測量不確定度存在于一個完整的測量過程中,人員、機器、材料、方法模型、環境、抽樣、數據審查、試樣配置等環節都會產生測量不確定度。測量不確定度決定了測量結果的可用性,用于判斷測量結果的可靠性程度,在合理評定前提下,測量不確定度越小,水平越高。
CNAS-CL01:2008 與RB/T214-2017 都對測量不確定度提出了相同的要求,不僅校準實驗室,檢測實驗室也要識別檢測過程中不確定度的貢獻。CNASCL01-G003:2021 對測量不確定度的要求進行了細化,對校準實驗室提出了應評定所有校準結果不確定度的要求,對檢測實驗室提出了應評定以數值表示測量結果的測量不確定度的要求,除此之外,校準和檢測實驗室還應在校準報告或檢測報告中體現校準或檢測結果的測量不確定度。測量結果不確定度的正確評定與應用能夠減少實驗室和客戶對結果誤判的風險,同時檢測實驗室報告測量不確定度還有以下優點:用于質量監控活動中兩個測量結果的比較、方便客戶判斷測量結果是否適用、減少重復檢測、評價測量方法便于改進、不需一一征求客戶是否需要、用于客戶評估測量不確定度。
裝船設備空氣噪聲測量結果以數值表示,經常會出現測量結果與規范限值較為接近的情況,這時就要考慮測量結果的不確定度直接影響,要正確評定噪聲測量結果的不確定度,然后根據實驗室體系文件規定的判定規則,作出正確的接收與拒絕判決。
1 測量方法概述
1.1 測量依據
GJB 4058-2000、GJB 763.5A-2020。
1.2 測量儀器
傳聲器、前置放大器、動態信號測試分析系統,各系統連接方式詳見圖1。

圖1 系統連接圖
1.3 測量場地
室內或室外開闊場地,半消聲室。
1.4 測量原理
將受試設備安裝在除地面外無反射條件的場所,依據標準的要求在受試設備的測量表面上布置5 個測點,測量表面與基準體各對應面平行且距離d 取1 m,測點布置如圖2 所示。受試設備根據試驗大綱要求的額定工況運行,測量人員根據受試設備運行情況,調試測量系統,將信噪比調整到最佳位置。在測量系統無異常的情況下,操作測量分析設備,分別記錄每個測點的背景噪聲級和設備運轉時的聲壓級。
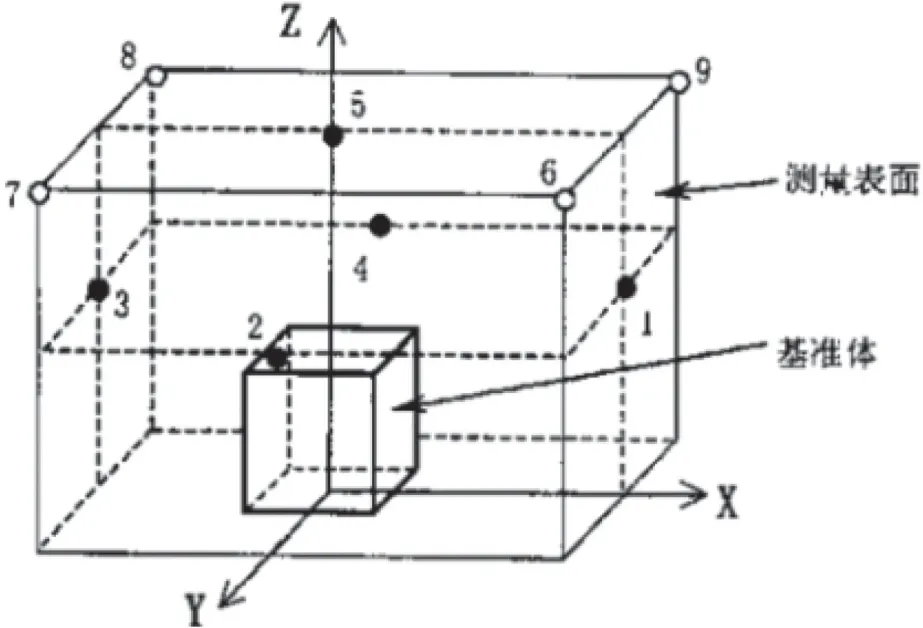
圖2 測點布置圖
標準中規定背景噪聲的聲級應比受試設備運轉時的噪聲級低10 dB 以上,若差值小于10 dB 時,應對背景噪聲修正。所以單個測點的背景噪聲級和設備運轉噪聲級差值小于10 dB 時,應修正測量值,經修正后的單點聲壓級即為輸入量。修正值產生的誤差為已知的系統誤差,不參與不確定度的評定。
2 建立包括輸入量在內的評定合成標準不確定的測量模型
受試設備空氣噪聲測量結果的數學公式為:
假設測點個數為5,單點噪聲級修正值Lpi為輸入量xi,受試設備表面平均聲壓級為輸出量y,測量模型可以簡化為:
式中:
x1~x5—測點1 ~測點5 經修正后的聲壓級,dB;
y—受試設備表面平均聲壓級,dB。
3 不確定度的主要來源和分析
標準不確定度分為A 類標準不確定度和B 類標準不確定度。A 類標準不確定度是指測量重復性或復現性引入的標準偏差;B 類標準不確定度是指校準結果、設備最大允差、儀器分辨力、數值修約、測量結果的重復性r或復性限R 帶來的標準不確定度。
根據測量模型,可以看出A 類標準不確定度是對輸入量重復測量產生的不確定度。通過系統連接圖,可以分析出B 類標準不確定度為傳聲器頻率響應誤差、前置放大器頻率響應誤差和傳輸損失偏差、動態信號測試分析系統幅值示值誤差和頻率示值誤差。
因此標準不確定度的主要來源有:
1)輸入量xi重復測量產生的標準不確定度分量u1;
2)傳聲器頻率響應誤差產生的標準不確定度分量u2;
3)前置放大器頻率響應誤差產生的標準不確定度分量u3;
4)前置放大器傳輸損失偏差產生的標準不確定度分量u4;
5)動態信號測試分析系統幅值示值誤差產生的不確定度分量u5;
6)動態信號測試分析系統頻率示值誤差產生的不確定度分量u6。
4 標準不確定度的評定方法
4.1 標準不確定度A 類評定
1)標準偏差法
對同一輸入量xi作n 次測量,表征測量結果分散性的參數s 即為標準偏差,也就是測量結果的A 類標準不確定度,用貝塞爾公式計算:
式中:
s—標準偏差;
xi—第i 次獨立觀測值;
n—獨立觀測次數(n ≥10);
x —n 次獨立觀測值的算數平均值。
在實際應用時應注意貝塞爾公式只用于計算單次測量的標準偏差,此時對應的A 類標準不確定度uxi=s。如不確定度評定過程中,輸入量xi以m 次測量的平均值作為測量結果的估計值時,平均值的標準偏差計算公式為:,此時由引入的A 類標準不確定的uxi=。
另外,還要注意,在運用貝塞爾公式計算標準偏差前,應使用萊茵達法剔除n 次測量數據中的離群值,這種方法也叫三倍標準偏差法。首先計算求得n 次測量數據的平均值與單次測量的標準偏差s,然后將n 次的測量數據分別與3 倍的標準偏差(3s)進行比較,如發現有大于3s 的測量值,則剔除,反之,則保留。三倍標準偏差法一般應用于n ≥10 大樣本的測定。
2)合成樣本標準偏差法
如果測量次數n 較少,為了提高不確定度評定結果的可靠性,就要用到合成樣本標準偏差sp來表示A 類不確定度。合成樣本標準差的概念為對輸入量x 進行了n次測量,得到xi,其平均值為,標準偏差為s;如果有m 組這樣的測量組合,每組的標準偏差即為sj,則可以計算合成樣本標準偏差,計算公式如下:
但要注意的是,合成樣本標準偏差sp只有在被測量值是同類型且較為穩定,m 組測量組合的標準偏差sj較為接近相差不大時,才能使用如果觀察發現各測量組標準偏差sj中有相差較大的變量,使用sp前需要驗證系統是否穩定,驗證方法如下:
首先計算系統標準差(s)和(s)的估計值估(s),計算公式如下:
式中:
s —標準偏差的平均值;
m—測量組列數;
sj—第i 組測量標準偏差;
n—測量列的次數。
4.2 標準不確定度B 類評定
4.2.1 B 類不確定度評定流程
B 類不確定度主要來源于測量人員讀數誤偏差,儀器設備分辨率、靈敏度、穩定性、校準不確定度誤差,標準物質純度、穩定性誤差,測量模型方法的準確程度,環境條件的影響,取樣代表性不夠,數值修約等等。B類評定的流程如圖3 所示。
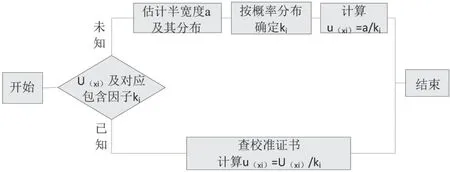
圖3 B 類不確定度評定流程圖
4.2.2 B 類不確定度常用的評定方法
1)校準結果帶來的不確定度
如果校準證書中給出了儀器設備的擴展不確定度U,包含因子k,由此引入的標準不確定度為:
2)儀器設備的最大允差帶來的不確定度
如儀器設備的最大允差為±Δ,半寬度為Δ,允差在區間(-Δ ∽+Δ)的概率是均勻的,服從矩形分布,則儀器設備的最大允差帶來的標準不確定度為:
3)儀器設備的分辨力帶來的不確定度
4)量值數值修約帶來的不確定度
5)已知測量結果的重復性限r 和再現性限R
若檢測標準中給出了測量結果的重復性限r,在相同的測量條件下,進行兩次測量,兩次測量的差值應符合重復性限r 的要求,即:
若檢測標準中給出了測量結果的再現性限R,則單次測量帶來的標準不確定度為:
n 次測量的平均值的標準不確定度為:
6)常用概率分布類型
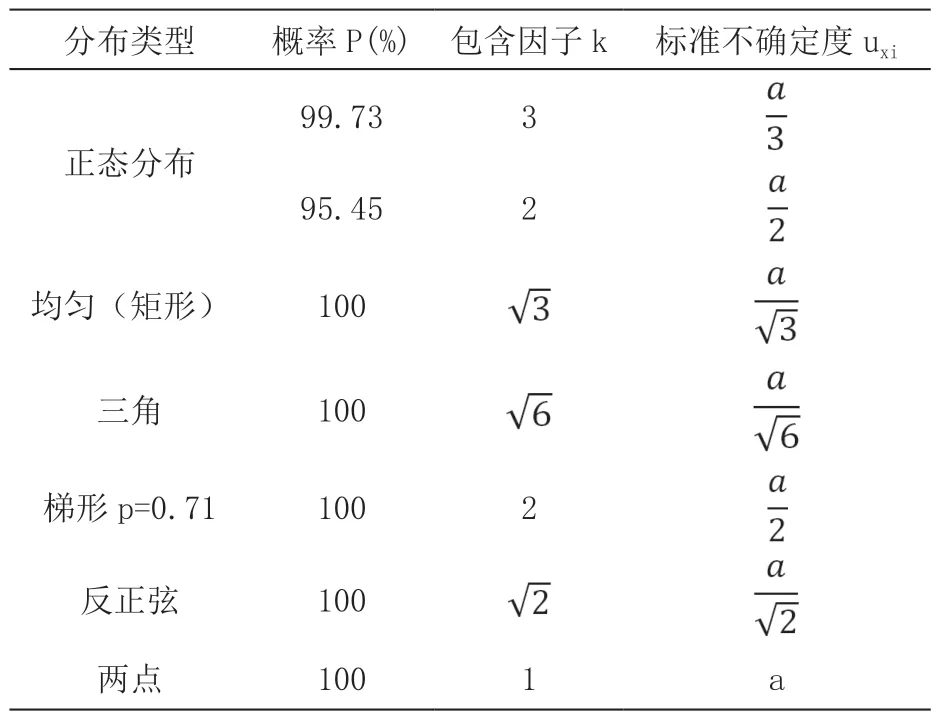
表1 常用分布與包含因子k、uxi 的關系
a 為測量值概率分布區間半寬,在無法確定B 類來源的分布類型時,考慮從嚴估計,均可估計為均勻分布。
5 各分量標準不確定度的評定計算
5.1 輸入量重復測量引入的標準不確定度分量u1
為了評定u1,對受試設備進行了10 次獨立測量,得到了輸入量xi1,xi2,…xi10,其平均值為,試驗標準偏差為s。測點1 ~測點5 分別記錄設備各測量面的聲壓級,由于各測量面噪聲輻射指向性的差異,5 個測點之間無相關性,因此將10 次測量數據分為m 組(m=5)這樣的測量組合,然后合成樣品標準偏差。測量數據及計算結果如表2 所示。
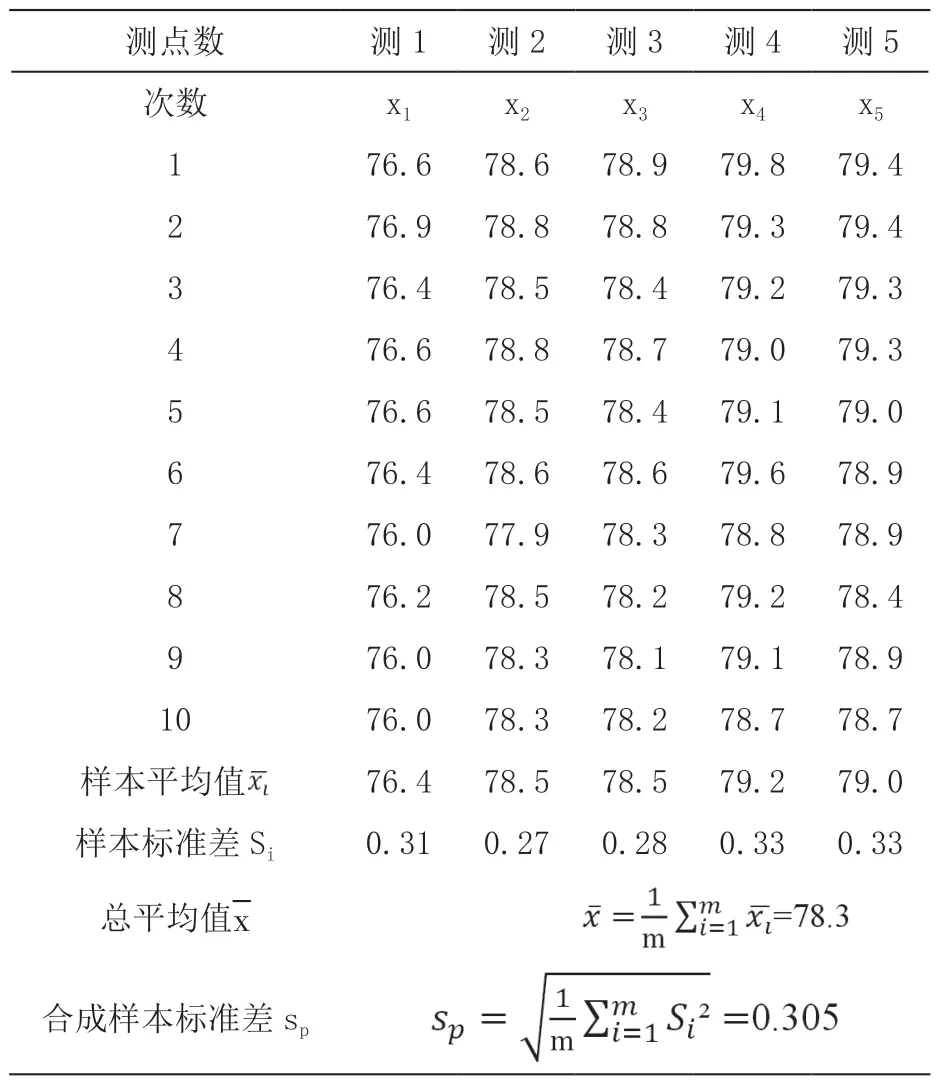
表2 受試設備測量重復性評定數據 單位dB
根據式(6)、(7)分別計算,(s)=0.028 3,估(s)=0.030 6,結果(s)<估(s),說明測量狀態穩定,sp可以使用,則:
5.2 傳聲器頻率響應誤差引入的不確定度分量u2
查傳聲器校準證書,傳聲器擴展不確定度,見表3。
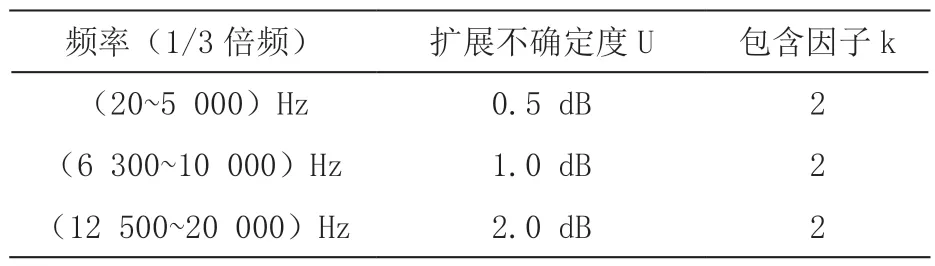
表3 傳聲器頻率響應校準不確定度
由于校準使用的計量標準器具的不確定度是隨頻率變化的變量,根據量值溯源由上而下的要求,傳聲器頻率響應誤差校準帶來的擴展不確定度也是隨頻率變化的變量,所以在計算傳聲器頻率響應誤差帶來的標準不確定度時,也要分頻段給出評定結果,見表4。
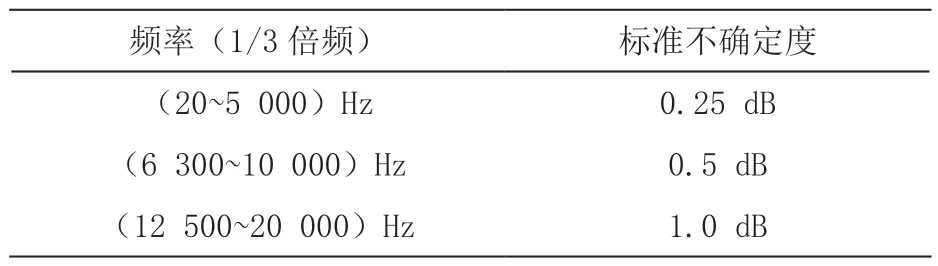
表4 傳聲器頻率響應標準不確定度
5.3 前置放大器頻率響應誤差引入的不確定度分量u3
查校準證書,前置放大器頻率響應示值誤差校準的擴展不確定度U=0.2 dB,k=2,則前置放大器頻率響應示值誤差帶來的標準不確定度為:
5.4 前置放大器傳輸損失偏差引入的不確定度分量u4
查校準證書,前置放大器傳輸損失偏差的擴展不確定度U=0.1 dB,k=2,則前置放大器傳輸損失偏差帶來的標準不確定度為:
5.5 動態信號測試分析系統幅值示值誤差引入的不確定度分量u5
動態信號測試分析系統頻譜幅值示值誤差為0.24 %,其概率分布服從均勻分布,則動態信號測試分析系統幅值示值誤差帶來的標準不確定度為:
5.6 動態信號測試分析系統頻率示值誤差引入的不確定度分量u6
動態信號測試分析系統頻率示值誤差為0.001 %,其概率分布服從均勻分布,則動態信號測試分析系統頻率示值誤差帶來的標準不確定度為:
由于標準不確定度分量u6遠遠小于最大不確定度分量的十分之一,在合成標準不確定度中的貢獻可以忽略,因此u6不參與合成標準不確定度的評定。
6 合成標準不確定度的評定
將上述參與合成標準不確定度評定的分量列于表5中。
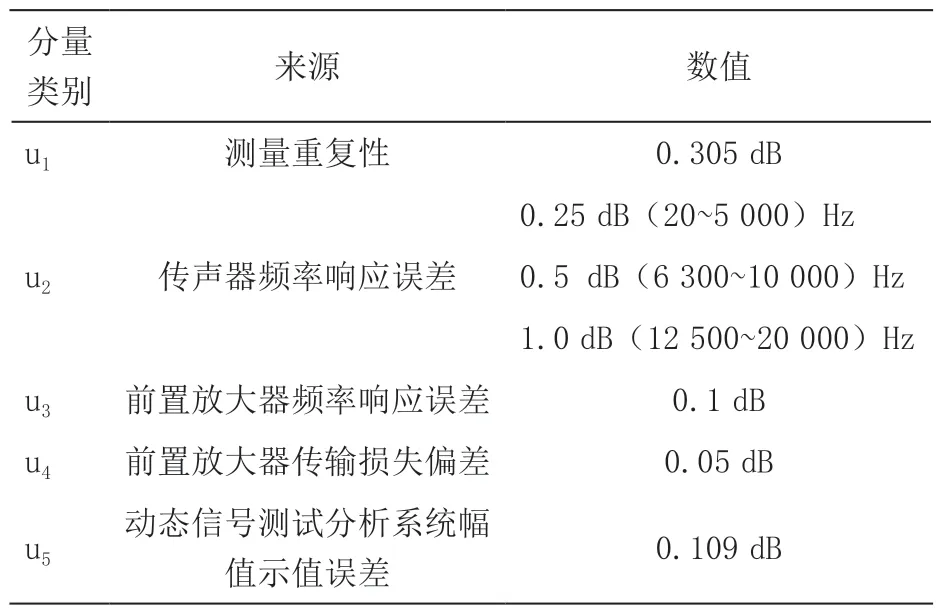
表5 標準不確定度分量表
由于輸入量x1、x2、…x5是獨立不相關的,輸出量y與輸入量xi之間的關系為對數和的數學模型,所以合成標準不確定度計算公式為:
計算結果如表6 所示。
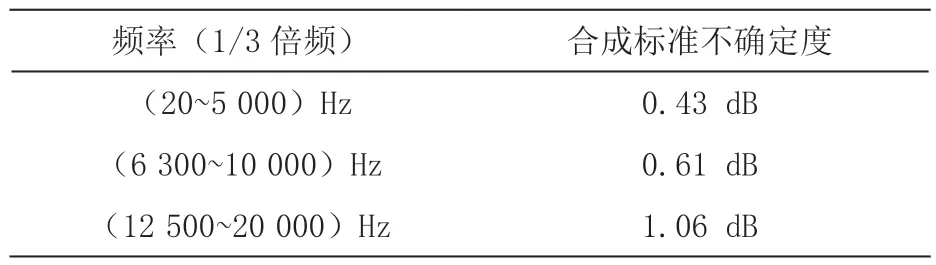
表6 合成標準不確定度uc(y)評定結果
7 擴展不確定度的評定
擴展不確定度評定時需要考慮是否需要給出Up,無需給出Up時,包含因子k 一般取2~3,U=k×uc(y)。如果需要給出Up 或要了解不確定度的可靠程度時,且標準不確定度uc(y)近似正態分布,先計算有效自由度Ueff;再選取置信概率P(一般為0.95 或0.99),根據Ueff和P查分布臨界值tp(u),得到包含因子kp= tp(u),最后計算Up= kp×uc(y)。
JJF 1059.1-2012 修訂內容中弱化了給出有效自由度的要求,一般情況下,只需要給出測量結果的擴展不確定度U,并注明包含因子k 即可。
評定本次測量結果的擴展不確定度,取包含因子k=2,則U=k×uc(y),分段計算結果如表7 。
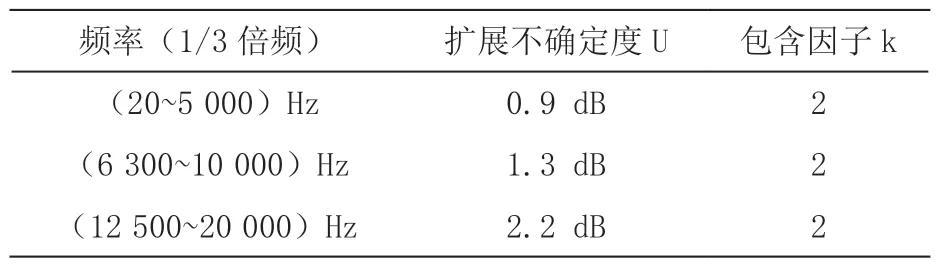
表7 擴展不確定度U 評定結果
8 結果報告
報告測量結果的擴展不確定度時,表示形式為:測量結果擴展不確定度(單位),包含因子k 為2,對應的置信水平p 近似為95 %。
根據擴展不確定度分段評定的結果,受試設備空氣噪聲測量不確定度分以下三種形式報告與表示:
1)若測量頻率在(20~5 000)Hz 范圍內,受試設備空氣噪聲=(78.4±0.9)dB,k=2;
2)若測量頻率在(20~10000)Hz 范圍內,受試設備空氣噪聲=(78.4±1.3)dB,k=2;
3)若測量頻率在(20~200000)Hz 范圍內,受試設備空氣噪聲=(78.4±2.2)dB,k=2。
9 總結
本文采用GUM 法評定了受試設備空氣噪聲測量結果的不確定度,是基于線性的測量模型或可以轉換為線性模型、輸入量概率分布可假設為對稱分布、輸出量概率分布可假設為對稱分布或t 分布的三個前提下,若以上條件均不滿足時,GUM 法就不適用了,宜采用蒙特卡洛法(MCM)來評定,MCM 法需要利用大量仿真數據特征值進行計算機編程,對評定人員的要求較高。
受試設備空氣噪聲測量不確定度評定后,實驗室在作出與標準符合性聲明時,是應用簡單接受(風險共擔)判定規則,或是應用考慮不確定度影響的判定規則,這些都需要在管理體系文件中以文件化的形式規定。必要時修改委托書、合同評審記錄與報告模板,增加相應的判定規則方面的內容。
猜你喜歡
城市道橋與防洪(2022年4期)2022-07-01 06:04:12
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年8期)2019-05-09 02:22:48
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
動漫星空(興趣百科)(2019年3期)2019-03-07 07:23:10
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2018年4期)2018-05-09 07:07:52
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
專用汽車(2016年4期)2016-03-01 04:13:43
