自動巡航消毒機器人的設計與實現
2024-01-24 10:58:15張印葉春蘭周經欣劉茂龍王鴻翔石寶金儲德鋒
電腦知識與技術 2023年34期
張印 葉春蘭 周經欣 劉茂龍 王鴻翔 石寶金 儲德鋒

摘要:自動巡航消毒機器人能夠適應室內外復雜環境,消毒全過程無人值守,節省醫護資源。文章基于視覺樹莓派智能車,在Linux操作系統下訓練TensorFlow模型,進行深度AI學習,并開發完成端手機App,實現遠程監控、自動消毒和自動巡航三大功能。
關鍵詞:自動巡航;消毒;深度AI學習;遠程監控
中圖分類號:TP391? ? ? 文獻標識碼:A
文章編號:1009-3044(2023)34-0112-04
開放科學(資源服務)標識碼(OSID)
0 引言
隨著時代的發展,大家對公共衛生安全越來越重視。對于學校、醫院、商場等場景固定的場所,較之于傳統的消毒方式來說,機器人作業則具有更高的工作效率。特殊時期下,機器人自動消毒不僅減輕了醫護人員的壓力而且還降低了醫護人員感染的風險;另一方面,節省下來寶貴的醫護資源,更有利于社會的統籌安排、集中力量辦大事救急事。
當前,機器人自動消毒常用的殺菌手段主要有:霧化消毒過氧化氫、紫外線殺菌、激光超干殺菌、離子凈化消毒等。機器人自動消毒可以用環境形式,準確地認準需要消毒的地方,自動進行殺菌消毒。
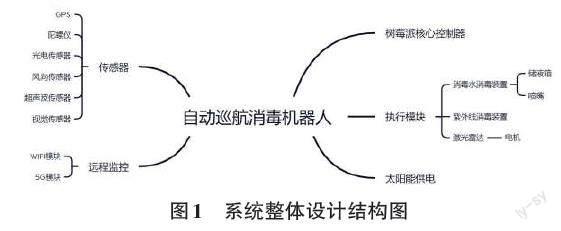
1 系統整體設計
自動巡航消毒機器人系統整體設計如圖1所示,系統由傳感器、遠程監控、樹莓派核心控制器、執行模塊以及太陽能供電五個部分組成。通過太陽能為整個消毒機器人供電,各個傳感器實時實地檢測環境信息、機器人的自身狀態,檢測好后將信息傳送到核心控制器,核心控制器將信息處理后,將執行命令傳送給實施單元,實施單元負責機器人的消毒工作[1]。遠程遙控模塊可以實現機器人和手機App之間的互傳,機器人可遠程傳送信息到App,同時可以控制機器人的運作。自動巡航消毒機器人系統基于Linux OS和TensorFlow深度學習框架,基于 OS遠程開發監控App,在這個基礎上完成機器的視覺、手機監控和自動巡航這3種功能。
2 傳感器設計
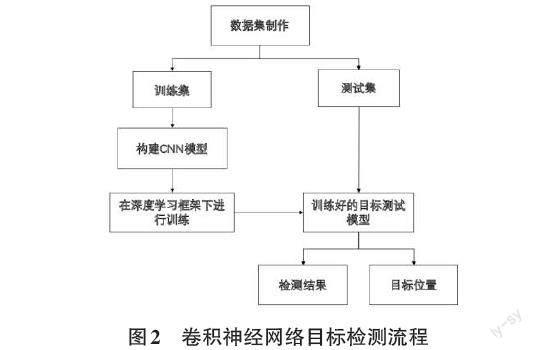
2.1 卷積神經網絡目標檢測
基于廣度的學習方法——卷積神經網絡(Convolutional Neural Network,CNN) 的基礎,通過廣度學習獲得非線性基礎較高的語法,分類準確度的提高,具體檢測流程如圖2所示。
2.1.1 卷積神經網絡構建
按照實際要求,需要機器人對視野目標進行判斷,并在圖像中標記大小與位置的信息。Faster R-CNN(Faster Regions with Convolutional Neural Network)檢測法在速度和精確度都有較明顯優勢[1]。先提取目標區域,再使用應用卷積神經網絡對候選區域進行分類,再通過非極大值抑制這個方法得出圖像中的目標的類別與邊界。
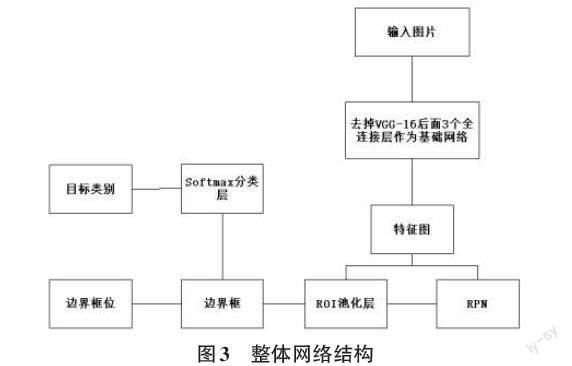
本文使用VGG16作為基礎網絡對圖片特征信息進行提取,將VGG16之后的3個連接層全部刪除,通過增加一個分組無線網在輸出特征圖后完成目標區域和候選區域的生成工作。
將特征圖、目標區域、候選區域傳送至池化層,網絡使用的是Faster R-CNN內容。池化層ROI接收到VGG16提取的特征圖、目標區域、候選區域后,將特征圖中對應目標區域和候選區域特征轉變為向量和長度固定。網絡被分兩層即是Softmax分類層和邊界框回歸層,完成識別對象和修正邊界框的工作,細化精度去預測對象位置,具體網絡結構如圖3所示。
Faster R-CNN先確定目標區域和候選區域,再對各個區域進行識別,通過回歸算法來修正目標邊界。RPN層為目標區域和候選區域,損失函數為目標概率損失疊加邊界框位置損失,其表達式為:
[L({P},{t})=1NclsiLcls(Pi,P*i)+λ1Nreg×iP*iLreg(ti,ti?)]
在上述方程中i是為RPN中的序列號;Pi為錨框對象概率,當錨框有對象的時候,pi*為1,如果錨框沒有對象的時候pi*就為0;其中ti和ti*兩個分別是預測中的位置的預測參數和邊界回歸層的偏移坐標;Lcls和Lreg分別是各分類層面上的交叉熵的損失函數及各回歸層之上損失函數。
[Lreg=R(ti-t*i)][L({P},{t})]
上式中R(x)為絕對損失函數smoothL1,其表達式為:
[R(x)=][0.5x2,|x|≤1|x|≤1,|x|>1]
若錨框中有相對應的對象,則回歸的損失是用pi*Lreg表明,平衡分類損失Ncls和預測損失Nreg,則對這兩個損失項進行標準化。
[tx=(x-xa)wa,ty=(y-ya)hatw=lg(wwa),th=lg(h*ha)]
[t*x=(x*-xa)wa,t*y=(y*-ya)hatw=lg(wwa),t*h=lg(h*ha)]
表達式中:x、y和w、h分別作為區域框的坐標及其尺寸;變量xa和x*作為錨框以及窗口回歸層區域框。由區域框與錨框的相對位置得出最終區域位置。
2.1.2 遷移學習
深度卷積神經網絡有很多參數,為了避免出現適應現狀,可以通過增加訓練數據集的范圍來進行網絡訓練。來實現深度卷積神經網絡識別效果的要求,可用遷移學習訓練方法,先在另外大規模數據集上訓練,得到訓練后的模型參數,用初始化本網絡的參數值并再次訓練,得到原參數的調優值,反復迭代后得到更加優化的網絡模型。訓練期間,可實時觀測整個訓練過程中損失函數的收斂情況。
2.2 滾動窗口和人工勢場路徑規劃
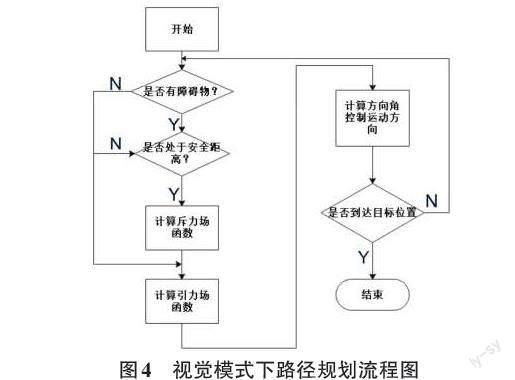
利用機器人所裝配的電子監控鏡頭取得部分信息,得到升級后的目標,在滑動窗口內規劃部分路徑并實現當前方法,通過不間斷地移動窗口,取得新的環境信息資源,從而實現了升級和融合反饋。并且使用算法簡化了二維路徑使之為一維路徑,使用滑動窗口全覆蓋地面搜索。當前視野若無待消毒區域,機器人則由風向傳感數據繼續待消毒區域作業。追蹤流程如圖4所示。
另外,若檢測到區域內無障礙或者障礙物在安全距離外,機器人直接直線行進至目標點;若檢測到路面有障礙,則躲避障礙。本文使用人工勢場算法VFF(Virtual Field Force),在尋找目標的時候,機器人規避障礙,得到最易到達的路線:將機器人的實際環境變成人為創造場地,使得對象會對機器人形成一種引力作用;同樣的障礙物對機器人的作用相似于斥力場中的斥力,機器人運動軌跡由引力與斥力的合力控制。
[Uat(X)=12η(X-Xgoal)2]
[Uat(X)=12k(1p-1p0)2,p≤p00,p>p0]
引、斥力場的表達式,如下所示:
根據負梯度理論,產生的引、斥力分別為:
[Fat=-grad[Uat(X)]=η(X-Xgoal)]
[Fre=-grad[Ure(X)]=k(1p-1p0)]
表達式中:η、X分別為增加引力和運動體坐標;Xgoal為對象坐標(矢量、大小為X-Xgoal、方向為運動實物指向兌現的方位);k、p、p0分別為斥力增益系數、移動物體和障礙間的距離、障礙物的影響范圍(正常數)。移動物體運動所受合力及其大小為引、斥力的矢量求和:
[Fsum=Fre+Fat]
2.3 導航定位設計
ATGM3325D-5N方位導航模塊可支持北斗系統和GPS導航系統。運作時,定位模塊輸出數據由串行端口傳輸到主要控制芯片,并完成經緯度信息的剖析,作為機器人自動巡航、路徑規劃以及自動返航的基礎;實時定位方向使用陀螺加速度計和地磁傳感器;中部集合成解算器,可以精準地輸出環境下的模塊姿態。
2.4 避障模塊設計
探測功能使用HC-SR04傳感器實現,通過舵機和超聲波實現避障[2]。舵機轉動使得超聲波傳感器能夠實現多方位的檢測。規避障礙采用了輸出口并使用TRIG進行測量距離,同時要求至少10μs信號提供,電子線路模塊輸送40kHz的方形波號,并且需要自動進行檢驗來返回信號,輸入輸出端口ECHO 輸出一個高電平信號,所探機器人和物體的間距離為高電平持續的時長與速度的乘積,超過最低接觸距離后,小車自動后退,舵機轉動進行其他方位探測。
2.5 自動巡航設計
自主導航的構建方向主要使用了慣性雷達探測技術,通過兩個不同的攝影角度,確定機器人的相對位置,設計工作環境的圖形并且記錄路線。行進過程中,通過三維激光雷達完成精度小于1厘米的環境定位探索,相對于單獨使用視覺特征所構建的地圖,其誤差小,優化度高,避障更精確[3]。
3 遠程監控
手機與智能消毒機器人之間使用TCP/IP協議進行Socket通信,機器人可將視頻信息傳送到手機,App可通過指令完成對機器人的操作控制。一方面,通過手機App操控機器人時,機器人為S端,App端為C端;另一方面,在通過手機App查看機器人所攝視頻時,App端為S端,機器人則為C端[1]。
在idea軟件平臺上,使用機器人的思維流程來完成客戶端的代碼編寫。如圖5所示,測試接通機器端口2000號和相應的IP地址,通過得到Socket所展示的IO流向機器人S端獲得信息(如機器人的返回數據)或者發送數據,并且用Handler來輸出數據。輸入網址,進行HTTP連接并驗證后,可以查看視頻。
4 RPi核心控制器
Raspberry Pi(RPi) 基于Linux OS,多應用于軟件編程、教育工業,體積小巧且功能強大。本文主控中構造消毒學習、控制、構建地圖、連接無線網、上傳數據、缺水報警、報告統計等功能均基于RPi 4b。RPi 4b擁有4個核心CPU和多媒體控制功能強大。為了實現與外設數據的連接與傳輸,為RPi 4b引入了 USB 2.0 和 3.0 端口以及Type-C 充電端口[4]。
5 消毒執行系統
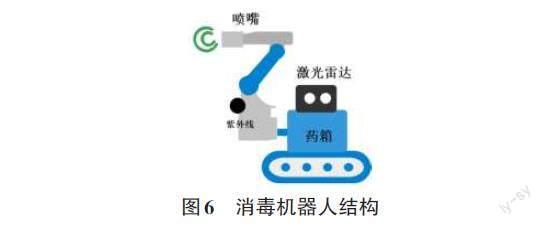
通過內置的配備藥劑噴頭與紫外線燈的可升降收縮桿,完成消毒機器人的高度調節,完成對目標物體表面的紫外線照射和消毒劑噴灑作業。組件內層使用驅動器,接通控制器的輸出口,設備驅動程序電機的轉動,使得其能接收處理器的PWM信號,完成對直流電機速度的調節。消毒劑可選取75%的酒精、H2O2溶液等[3]。如圖6所示。
6 太陽能供電系統
太陽能電池板能夠將太陽能源轉化為電能,用于負載或將電能存儲于鉛酸電池中。鉛酸電池運行穩定、循環度高,溫度不敏感等優點。太陽能控制能夠管理鉛酸電池的充放電,優化使用效率、智能負載等[5]。
7 結束語
本文完成了RPi智能車之上采用ATGM3325D-5N定位導航模塊、HC-SR04 超聲波測距模塊并搭載舵機,在Linux OS下訓練TensorFlow模型并進行深度AI學習,具備消毒執行系統、太陽能控制系統及手機遠程控制系統的自動巡航消毒機器人的設計與實現。經測試消毒機器人能夠利用機器視覺技術自動識別目標物體并進行紫外線殺菌及噴灑消毒溶液,能夠獨立完成規劃巡航線路,適應不同環境。
參考文獻:
[1] 湯偉,高涵,劉思洋.基于樹莓派的小型水域智能垃圾清理機器人系統設計與實現[J].科學技術與工程,2019,19(34):239-247.
[2] 張錚,張江寧,薛竹村,等.循跡避障滅火功能智能小車設計[J].實驗室研究與探索,2016,35(11):141-145,205.
[3] 沈家禮,蔣其友,楊環,等.基于樹莓派的固定路線巡航消毒機器人設計[J].無線互聯科技,2021,18(23):57-58.
[4] 馮三槐,陶文華,張華峰,等.樹莓派自動避障小車的消防應用[J].物聯網技術,2023,13(4):144-146,149.
[5] 曾升伍,向超,劉波.太陽能供電系統設計與分析[J].中國新通信,2020,22(3):157.
【通聯編輯:謝媛媛】
