基于空地協同的高光譜溫室氣體檢測系統設計
2024-01-27 13:41:31袁瑞臨劉建挺
電腦知識與技術 2023年36期
袁瑞臨 劉建挺


摘要:針對“碳達峰、碳中和”背景下的國家、省市與工業園區溫室氣體碳排放檢測的復雜性、隨機性,設計了一套基于空地協同的高光譜溫室氣體檢測系統。該系統采用多旋翼無人機載高光譜探測設備,SLAM巡航汽車定位協同的方式探測目標溫室氣體的空間域信息和光譜域信息,最終通過反演計算實現溫室氣體成分及濃度的檢測。相比目前的溫室氣體檢測設備,空地協同的高光譜成像設備具有測量精度高、安裝成本低、操作靈活性高、適應性強、續航時間長、人力耗費少等諸多優勢。
關鍵詞: 高光譜成像技術;溫室氣體檢測;空地協同;無人機遙感技術;無人巡航車
中圖分類號:TP273? ? ? ?文獻標識碼:A
文章編號:1009-3044(2023)36-0034-03
開放科學(資源服務)標識碼(OSID)
1概述
自第一次工業革命以來,世界經濟飛速發展,與此同時,化石燃料的燃燒導致溫室氣體濃度逐年增高,使得全球溫度升高[1]。21世紀以來,隨著中國加入世界貿易組織,加入全球化發展,給中國經濟發展帶來了巨大動力,與此同時,從2000年2.5噸左右的人均碳排放,快速增長至7噸。2000年后,中國的煤炭用量劇增,石油與天然氣的占比也在增加。碳排放的主要來源包括:煤炭、石油、天然氣、水泥生產等。可見,碳排放的來源與能源結構直接相關,而且會隨著社會發展,結構發生變化。
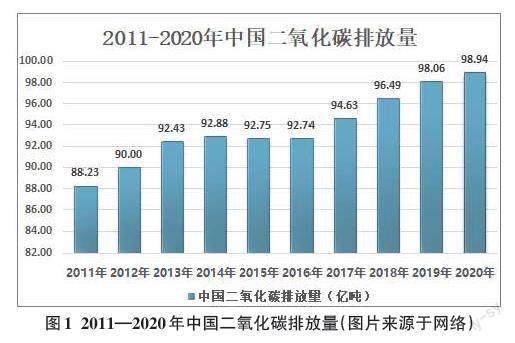
目前,我國二氧化碳排放量基本上呈逐年增加的趨勢如圖1所示,且二氧化碳等溫室氣體排放量主要集中于電力、鋼鐵等大型工廠,對于這些工廠企業的溫室氣體監測將變得極為重要。因此只有有效檢測溫室氣體的分布和排放量,才能為減少溫室氣體排放打下基礎[2]。隨著可持續發展戰略的不斷推進,又鑒于國家目前對環境空氣質量的重視和相關制度的日趨完善,對氣體監測設備的要求也逐步提升,空地協同高光譜成像溫室氣體檢測系統為各類氣體組成及濃度的檢測提供了新的途徑。對標政府及各類檢測單位對相關企業或工廠進行檢測有著充分的發展空間。
1.1無人機遙感技術
近年來,無人機相關技術發展迅猛,無人機因其機動靈活、控制方便和成本較低等特點在遙感監測、災害搜救和軍事偵察有著廣泛應用前景。當前,無人機機載平臺可搭載各種傳感器,如高光譜相機、彩色相機等,通過對獲取的監測數據反演出需觀測物的信息。
1.2高光譜成像技術
高光譜圖像蘊含著豐富的光譜域信息。作為有效的對地觀測手段,高光譜成像技術有著廣闊的應用前景。文獻[3]中指出,我國第一個遙感溫室氣體檢測設備安裝在風云三號D衛星上,實現了全球范圍主要溫室氣體CO2、CH4及CO等的濃度高精度監測,為我國在氣候變化方面的話語權提升起到了重要作用。
1.3無人巡航車技術
無人車集感知、建圖、定位導航和智能化決策于一體,有著廣泛的應用前景。激光雷達被稱為探測的“眼睛”,是一種通過發射激光來測量物體與傳感器之間精確距離的主動測量裝置。基于3D激光雷達的SLAM可以檢測周圍環境精準的三維點云信息,精度高、抗干擾能力強。SLAM技術可以在未知環境下完成地圖建立和自身位姿估計,為無人車的路徑規劃提供精確定位與地圖信息。
2溫室氣體檢測理論
當前應用較廣、較為基礎的溫室氣體排放量計算方法,如下所示:
E=AD×EF
式中:E為企業溫室氣體排放量;AD(Activity Data)為活動數據;EF(Emission Factor)為對應的排放因子。
考慮到碳排放的復雜性和隨機性,對于一些碳排放復雜的工業園區等場所,直接套用上述公式,會產生較大誤差 [4]。而現有的實際測量設備多數設備測量精度低,不能滿足超低排放檢測市場的需求,也難以為碳交易提供穩定可信賴的數據。針對上述情況,本文提出了采用基于空地協同方式利用高光譜成像儀來進行溫室氣體的監測。
二氧化碳(CO2)、甲烷(CH4)、一氧化二氮(N2O)等氣體成分能夠讓來自太陽的較短波長的能量順利通過,但是會劇烈地吸收來自地表和近地層大氣釋放出的較長波長的紅外能量,因此能夠使靠近地球表面的溫度升高,這類氣體成分被稱為溫室氣體。不同氣體成分均具有特性各異的特征光譜,相當于氣體的身份信息。每一個象元都是一條曲線。通過對其進行分析,可得到更準確的目標反射光譜。高光譜成像設備正是利用了這一特性,通過采集高光譜圖像來反演出溫室氣體的濃度。假設前向模型為[f(x)],[y-M]為測量到的數據,則反演算法可以表述為:
[y-M=f(x)+w]
其中,[w]為誤差,[w=(ω1,ω2,...,ωm)],
[y-M=(y1-M,y2-M,...,ym-M)],[x=(x1,x2,...,xn)]。
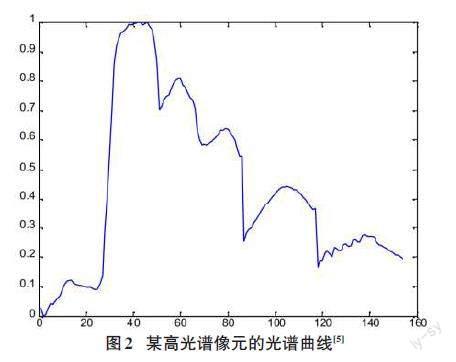
無人機搭載的高光譜相機的光譜分辨率小于10 nm,可在數百個波段上進行近紅外觀測。每一個像元都是一條曲線。通過對其進行分析,可得到更準確的目標反射光譜。圖2為某高光譜像元的光譜曲線。
3溫室氣體檢測系統研究與設計
3.1 技術難點
1)無人機自主著陸精度差:對于自主飛行的無人機而言,安全穩定著陸是一個很困難的問題。由于著陸階段飛行可調整空間小進而導致飛行精度要求高,所以對飛行安全的要求也高,尤其是在終端接近時,無人機必須高精度保持目標狀態,直到準確地在規范區域降落,從而保證無人機及云臺搭載設備的安全[6]。
2)現有輪式結構小車功能應用性差:由于溫室氣體排放場所旁會存在不同的地形,因此小車在進行溫室氣體監測時,需要適應于不同的路面環境。在土壤面上工作時,輪式結構對地面壓強大,工作時輪胎氣壓一般為83.3~137.2 Kpa(0.85~1.4 kg/cm2 ),硬路面一般為147~196 Kpa(1.5~2.0 kg/cm2 ),易陷車,在潮濕泥濘或松軟土壤上易打滑,牽引附著性能差,不能發出較大的牽引力,對松軟地形有較大程度上的破壞性。在較為崎嶇復雜的地形中,輪式結構的越障能力差,地形適應能力弱。同時在操作小車運行及回收無人機時,需對小車進行位置微調,而輪式結構轉彎效率低,外轉半徑大,在進行細微精準位置調動時較為困難。
3)無人機續航能力差:當前市場上的商用無人機續航能力普遍在1 h以下,難以實現長時間連續性工作,目前對無人機進行回收充電大都需要依靠人工操作,需有電源及充電線連接,會給無人機帶來頻繁拔線的物理損傷,且步驟冗雜、費時費力,無法實現一體化、自動化。
4)現有推掃式掃描成像視角只有20~30°,并且行進方向和掃射方向相互垂直,采集的數據屬于大范圍觀測,需要進行圖像拼接、校正等后處理,容易產生較大誤差推掃式掃描系統利用飛行器的向前運動,借助于與飛行方向垂直的掃描線記錄而構成二維圖像[7]。
3.2系統架構設計
設計的基于空地協同與高光譜成像技術的溫室氣體檢測系統組成有:
1)機載平臺:①無人機機械結構:包括機架、電機、電源系統;②飛行器片上系統外圍傳感器:包括有GPS、陀螺儀、加速度計、磁感應計、高光譜相機、普通光學相機等外圍模塊;③無人機控制器,負責多傳感器信息的處理和融合,具體實現無人機姿態回路、速度回路和位置回路的精確控制;負責對云臺相機傳輸過來的圖像進行處理和傳輸;④無線數傳天空端,負責地面控制中心與機載計算機系統之間的通信,包括從地面控制中心的指令傳輸和無人機平臺采集的圖像到地面控制中心的傳輸。
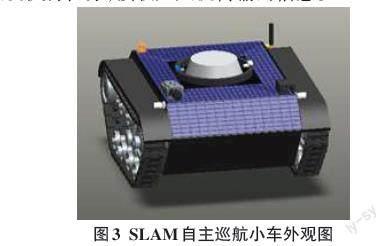
2)地面平臺:①SLAM自主巡航小車如圖3所示,作為無人機著陸平臺,在無人機起降時傳送GPS數據給無人機;②地面控制中心:通過發送控制指令讓無人機執行任務,接收無人機傳輸的信息。
3.3無人機自主降落和充電系統設計
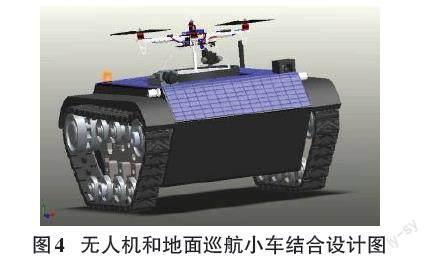
由于GPS的導航范圍廣,但是定位精度差;視覺導航雖然定位精度高,但是其作用范圍小,適用于微調。因此,結合以上2種方法的優缺點,筆者設計的自主降落方案采用GPS+計算機視覺伺服導航系統[6],無人機和地面巡航小車結合設計圖如圖4所示。
當地面控制中心下達降落命令后,無人機根據GPS數據采用位置控制算法導航至巡航車附近,然后采用基于視覺伺服導航方式,降落至目標位置。高精度自主著落系統配合單電容耦合充電結構,實現無人機著陸充電一體化、自動化。減少人力成本,增大無人機續航能力,提高了監測系統對各種環境的適應能力。
3.4蝸輪蝸桿履帶式行走結構設計
小車內部裝有雙步進式三合一減速電機,采用蝸輪蝸桿傳動結構(如圖5所示),帶動后驅履帶輪運轉,使其在不同地形下能夠正常行走,更好地適應多樣的復雜地理環境。結構特點有傳輸扭矩大、工作平穩、壽命長。實際上齒面摩擦系數因振動等原因由靜摩擦系數變成動摩擦系數,也具有傳輸扭矩大、工作平穩、壽命長的特點。
3.5滾動式掃描成像系統設計
前文提到,推掃式掃描成像雖然容易實現,但視角只有20~30°,采集的數據是對于大范圍觀測,需要進行圖像拼接、校正等后處理[7]。針對此類問題,筆者決定采用新型滾動式掃描成像方式,可以擴大視場范圍。無人機載高光譜成像方式采用滾動式掃描,相較于原有推掃式掃描視場小的問題,滾動式成像空間分辨率高、譜段較多,使其掃描成像范圍更加靈活可控,維持了滾筒在轉動過程中的重量平衡,也保持了飛機飛行的穩定性[8],滾動式掃描成像系統設計如圖6所示。
4結論
面向碳交易檢測和監測關鍵核心技術研發是“十四五”國家重點研發計劃“碳達峰碳中和關鍵技術研究與示范”重點專項擬支持17個研究方向之一。筆者設計的基于空地協同的高光譜成像溫室氣體檢測設備基于高光譜成像技術,以多旋翼無人機搭載高光譜探測設備,SLAM巡航汽車定位協同的方式探測目標的二維幾何空間及一維光譜信息,獲取高光譜分辨率的連續、窄波段的圖像數據,從而實現溫室氣體成分及濃度的檢測。在無人機的充電方式上,團隊創新性地采用SLAM巡航小車搭載充電平臺,單電容耦合的無線充電方式,通過無人機與搭載平臺上的充電錐形平臺相結合,使無人機在降落時利用自重修正降落偏差,實現無人機的自主充電。相比目前的溫室氣體檢測設備,空地協同的高光譜成像設備具有測量精度高、安裝成本低、操作靈活性高、適應性強、續航時間長、人力耗費少等諸多優勢。
用碳纖維復合材料代替鋼或者鋁,減重效率可達到20%~40%,飛行器結構材料約占起飛總重量的30%,減輕結構材料的重量可以帶來許多好處。減重在節省電力消耗的同時擴大了飛行半徑,提高了復雜地形生存能力和飛行靈活性,提高了航程和凈載能力,具有顯著的經濟效益,也是筆者下一步的研究方向。
參考文獻:
[1] 鄧昊.基于激光外差光譜技術的主要溫室氣體柱濃度測量方法研究[D].合肥:中國科學技術大學,2020.
[2] 王汝雯.基于WFM-DOAS溫室氣體柱濃度反演方法及應用研究[D].合肥:中國科學技術大學,2019.
[3] 申春梅,于峰,劉文凱.FY-3D衛星高光譜溫室氣體監測儀熱控設計及在軌驗證[J].北京航空航天大學學報,2020,46(11):2026-2038.
[4] 楊美昭.企業溫室氣體排放量監測計量方法研究[D].保定:河北大學,2021.
[5] 袁瑞臨.基于高光譜圖像分析的地物變化檢測方法研究[D].哈爾濱:哈爾濱工業大學,2019.
[6] 韋浪.車載無人機系統方案與控制技術研究[D].北京:北京理工大學,2016.
[7] 葛明鋒.基于輕小型無人機的高光譜成像系統研究[D].上海:中國科學院研究生院(上海技術物理研究所),2015.
[8] 李月,楊燦坤,周春平,等.無人機載高光譜成像設備研究及應用進展[J].測繪通報,2019(9):1-6,17.
【通聯編輯:唐一東】
