基于引導(dǎo)濾波的巡檢無人機(jī)自主循跡自動(dòng)控制
2024-01-27 02:58:42張貴勇
自動(dòng)化與儀表 2024年1期
關(guān)鍵詞:檢測
張貴勇,孫 強(qiáng),彭 程,易 立
(1.國能壽光發(fā)電有限責(zé)任公司,濰坊 262700;2.北京電科智擎科技有限公司,北京 100000)
無人機(jī)作為一種由遙控器或編程軟件實(shí)現(xiàn)控制的小型飛行設(shè)備,具有高穩(wěn)定性、高效作業(yè)、高精度懸停等諸多優(yōu)勢[1]。隨著人工智能、物聯(lián)網(wǎng)等先進(jìn)技術(shù)的崛起與融合,無人機(jī)已成為軍事、電力、緊急救援等行業(yè)中的主要輔助設(shè)施,可代替人工完成搜索、巡檢、搜救等高危、高強(qiáng)度工作[2-3]。在工業(yè)生產(chǎn)中,機(jī)械呈自動(dòng)化發(fā)展,效率與安全需求也日益增加。無人機(jī)具備超強(qiáng)的三維空間運(yùn)動(dòng)能力,因其不受巡檢場景的限制,在非接觸式機(jī)械巡檢任務(wù)中的作用越來越大,并受到使用企業(yè)、檢驗(yàn)檢測部門、無人機(jī)設(shè)計(jì)與制造業(yè)等多個(gè)相關(guān)方的高度重視,期望其能為加快設(shè)備檢驗(yàn)工作的完成效率與安全性做出貢獻(xiàn)[4]。
為此,機(jī)械領(lǐng)域的眾多學(xué)者紛紛展開研究,以提高無人機(jī)的巡檢質(zhì)量。文獻(xiàn)[5]為降低大型起重機(jī)金屬結(jié)構(gòu)的檢測難度,提高自動(dòng)化水平,針對多旋翼無人機(jī)開發(fā)了自動(dòng)駕駛智能巡檢系統(tǒng),該系統(tǒng)基于全球定位系統(tǒng)與全球衛(wèi)星導(dǎo)航系統(tǒng)的雙系統(tǒng)精密定位技術(shù),提出飛機(jī)打點(diǎn)與航跡飛行融合的自動(dòng)巡檢方式;文獻(xiàn)[6]為加強(qiáng)無人機(jī)在井下狹窄、昏暗且沒有全球定位系統(tǒng)的特殊環(huán)境中的適應(yīng)能力,采用了激光即時(shí)定位與地圖構(gòu)建算法,設(shè)計(jì)出具有定位和避障功能的系統(tǒng);文獻(xiàn)[7]為解決無人機(jī)熱紅外圖像因受機(jī)械制造環(huán)境影響而導(dǎo)致的尺度轉(zhuǎn)換精度過低問題,將預(yù)處理后的圖像光譜指數(shù)輸入BP神經(jīng)網(wǎng)絡(luò),完成熱紅外圖像空間分辨率的降尺度處理,從而得到高分辨率溫度圖像。
巡檢無人機(jī)涉及多種技術(shù),盡管現(xiàn)有文獻(xiàn)已從航跡規(guī)劃、智能控制等不同角度提升了巡檢質(zhì)量,但仍存在較多待優(yōu)化提升的地方。目前,無人機(jī)在進(jìn)行視覺跟蹤時(shí)容易受到風(fēng)力影響而產(chǎn)生偏航,并且只能機(jī)械地按照預(yù)定計(jì)劃飛行,無法檢測環(huán)境變化并調(diào)整計(jì)劃。因此,本文結(jié)合引導(dǎo)濾波提出一種自主循跡自動(dòng)控制方法。
1 引導(dǎo)濾波的無人機(jī)采集圖像處理
無人機(jī)的視覺傳感器會(huì)導(dǎo)致圖像中存在大量噪聲,并放大這些噪聲,從而導(dǎo)致圖像失真。為解決這個(gè)問題,充分發(fā)揮引導(dǎo)濾波的保邊去噪優(yōu)勢[8],設(shè)計(jì)一種處理方法,3 個(gè)處理階段如下文所述。
(1)色彩空間轉(zhuǎn)換。將圖像的色彩空間從RGB(red,green,blue,紅-綠-藍(lán))轉(zhuǎn)化為HSV(hue,saturation,value,色調(diào)-飽和度-亮度),防止RGB 空間造成色彩失真[9]。
(2)濾波分層。利用引導(dǎo)濾波進(jìn)行分層處理,已知圖像f 為待實(shí)施濾波處理圖像,引導(dǎo)圖為D,則濾波輸出圖像fb如下所示,即圖像基礎(chǔ)層:
式中:ak、bk分別表示像素索引為k 的局部線性函數(shù)因子。
若HSV 空間內(nèi)V 通道的像素?cái)?shù)據(jù)是fV,則細(xì)節(jié)層由下式得到:
對于歸一化后的輸入圖像f′,利用下列針對圖像局部信息的自適應(yīng)伽馬校正算法[10],取得基礎(chǔ)層亮度增強(qiáng)后的圖像fb_g:
式中:α(x,y)表示各像素的伽馬校正因子。
關(guān)于細(xì)節(jié)層,通過sigmoid 函數(shù)的非線性變換實(shí)施拉伸處理,增加視覺強(qiáng)烈感。為盡可能多地留下有用信息,利用下列公式在[-β,β]范圍內(nèi)完成細(xì)節(jié)層圖像的線性映射:
引入sigmoid 函數(shù),逐步實(shí)施非線性變換與線性變換,得到基于初始映射范圍的細(xì)節(jié)層圖像,如下所示:
(3)加權(quán)融合。對于經(jīng)過亮度增強(qiáng)的基礎(chǔ)層與非線性拉伸處理的細(xì)節(jié)層,通過下列公式進(jìn)行加權(quán)融合,得到增強(qiáng)后的V 通道像素。將融合后的圖像色彩空間轉(zhuǎn)化回RGB 中,輸出的結(jié)果即為引導(dǎo)濾波處理后的高質(zhì)量無人機(jī)視覺圖像fg(x,y):
式中:η(x,y)表示加權(quán)因子。
2 巡檢無人機(jī)自主循跡自動(dòng)控制器設(shè)計(jì)
2.1 航跡點(diǎn)檢測
以所得的無人機(jī)視覺圖像為基礎(chǔ),利用拉普拉斯算子與Harris 算子檢測航跡點(diǎn)。在巡檢機(jī)械設(shè)備的場景中,將無人機(jī)待跟蹤的航跡點(diǎn)抽象地看成一條結(jié)構(gòu)化路徑。利用拉普拉斯算子與Harris 算子,檢測航跡的邊界與角點(diǎn),為自主循跡提供可靠依據(jù)。
作為二階微分算子,拉普拉斯算子具有微分特征[11],故邊界點(diǎn)即像素點(diǎn)二階微分值是0 的點(diǎn)。假設(shè)經(jīng)引導(dǎo)濾波處理后的圖像是fg(x,y),則該圖像拉普拉斯算子二階導(dǎo)數(shù)的計(jì)算公式如下:
根據(jù)拉普拉斯算子的二次微分正負(fù)峰間的過零點(diǎn)明確航跡邊界后,通過下列方程,加大灰度突變部分與平緩部分的反差,實(shí)現(xiàn)圖像銳化,提高模糊圖像的清晰度:
Harris 算子作為局部信號(hào)的自相關(guān)函數(shù),能有效地檢測出由信號(hào)位移產(chǎn)生的所有細(xì)微變化[12]。利用下列方程組求取圖像的二維方向梯度:
兩兩相乘各方向梯度,得到:
加權(quán)處理所得乘積結(jié)果,獲取窗口自相關(guān)矩陣C(x,y):
利用下式計(jì)算出矩陣C(x,y)的行列式值HLC(x,y)與跡值JZC(x,y):
航跡點(diǎn)檢測結(jié)果如下所示:
式中:k 表示經(jīng)驗(yàn)因子。
2.2 自主循跡自動(dòng)控制
以航跡點(diǎn)為循跡目標(biāo),利用外環(huán)方位控制器和內(nèi)環(huán)姿勢控制器實(shí)現(xiàn)無人機(jī)自主循跡的自動(dòng)控制。以航跡點(diǎn)作為循跡目標(biāo),并以其與無人機(jī)的方位與姿勢偏差為飛行軌跡的調(diào)整依據(jù),基于經(jīng)典的PID算法[13]設(shè)計(jì)出自動(dòng)控制器。經(jīng)方位與姿勢的雙環(huán)控制,實(shí)現(xiàn)無人機(jī)自主循跡的自動(dòng)控制,各組成部分具體描述如下:
(1)自主循跡策略。根據(jù)航跡路徑邊界與角點(diǎn)的檢測結(jié)果,基于carrot-chasing 路徑追蹤算法,構(gòu)建自主循跡方法,讓無人機(jī)能夠在固定高度上自主循跡飛行。若無人機(jī)投射點(diǎn)與起飛點(diǎn)的間距是L,視線角與航向角分別是θ、ψ,則自主循跡的目標(biāo)條件為高度固定、速度固定。以起飛點(diǎn)為中心,在待追蹤的航跡路徑AB 上設(shè)立虛擬目標(biāo)點(diǎn),令其與無人機(jī)在路徑上的橫向投射點(diǎn)之間的距離是δ,則起飛點(diǎn)-虛擬目標(biāo)點(diǎn)連線與水平方向的夾角即為180°減去橫向距離L 到起飛點(diǎn)-虛擬目標(biāo)點(diǎn)連線的夾角。橫向距離與起飛點(diǎn)-虛擬目標(biāo)點(diǎn)連線的夾角γ 為
式中:l 為起飛點(diǎn)與虛擬目標(biāo)點(diǎn)的連線長度。
(2)外環(huán)方位控制器。已知無人機(jī)與航跡路徑的偏移量Δe,無人機(jī)的當(dāng)前速度v 與當(dāng)前方位(x,y,z),期望速度vq與期望方位(xq,yq,zq),構(gòu)建出下列方位控制器的定義式:
式中:Kp、Ki、Kd分別表示PID 控制算法的比例、積分、微分參數(shù)。
(3)內(nèi)環(huán)姿勢控制器。已知無人機(jī)當(dāng)前姿勢角(即俯仰角、橫滾角、偏航角)分別是φ、λ、ω,則姿勢控制器的定義式為
式中:φq、λq、ωq表示各姿勢的期望角度;Δε 表示姿勢偏差。
(4)控制量計(jì)算。假設(shè)比例、積分、微分各參數(shù)的偏差項(xiàng)分別是,則控制量為
式中:E 表示參數(shù)偏差系數(shù);T 表示控制周期。
將控制量傳輸至無人機(jī),控制電機(jī)轉(zhuǎn)速來自動(dòng)控制自主循跡路線。
3 巡檢無人機(jī)自主循跡自動(dòng)控制效果檢測
3.1 實(shí)驗(yàn)準(zhǔn)備階段
在露天且空曠的地面上用定點(diǎn)的形式布設(shè)包含7 個(gè)航跡點(diǎn)的巡檢軌跡。選用經(jīng)緯M30T 型號(hào)的大疆自動(dòng)巡檢無人機(jī),其參數(shù)為飛行器尺寸470×585×215 mm(L×W×H)(展開,不包含槳葉),365×215×195 mm(L×W×H)(折疊);重量3770±10 g(含2塊電池);工作頻率5.725~5.850 GHz。經(jīng)過調(diào)試,測試所建系統(tǒng)的自動(dòng)控制性能與效果。除相機(jī)鏡頭焦圈視野和電池續(xù)航能力都設(shè)置為最高標(biāo)準(zhǔn)外,調(diào)試后的巡檢無人機(jī)的其他技術(shù)參數(shù)如表1 所示。
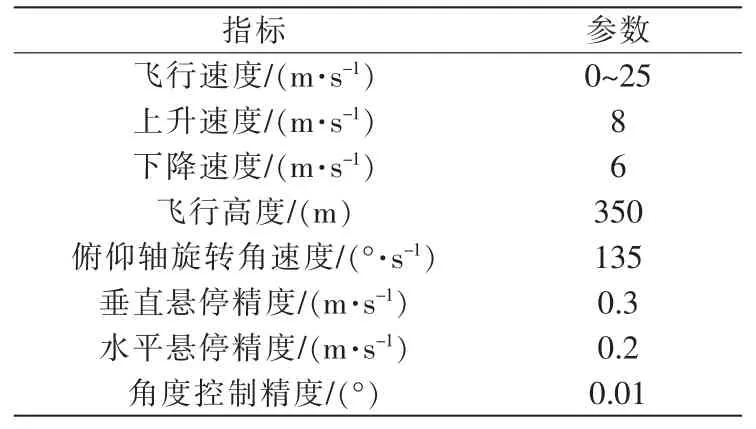
表1 調(diào)試后無人機(jī)參數(shù)Tab.1 Drone parameters after debugging
3.2 自主循跡軌跡分析
巡檢無人機(jī)自主循跡所形成的飛行軌跡如圖1所示。從與理想飛行軌跡的對比結(jié)果可以清晰地看出,在風(fēng)力和漂浮物等外界環(huán)境的干擾下,盡管所提方法在控制無人機(jī)轉(zhuǎn)彎時(shí)會(huì)降低飛行速度、改變飛行高度來實(shí)現(xiàn)自主循跡,使得所形成的循跡軌跡中的彎曲路徑無法與理想路徑完全重合,但整體上依舊具有較高的擬合程度,其有效性相對顯著。
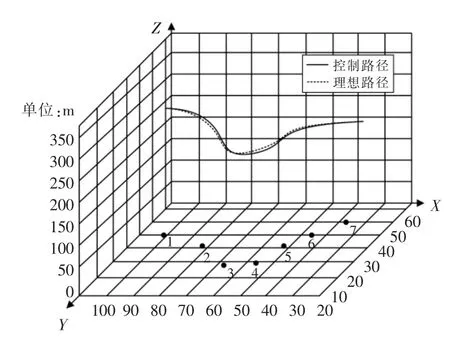
圖1 自主循跡軌跡示意圖Fig.1 Schematic diagram of autonomous tracking trajectory
為進(jìn)一步探討所提方法對巡檢無人機(jī)位置的自動(dòng)控制精度能否滿足高精度的巡檢需求,獲取循跡軌跡與理想軌跡在3 個(gè)方向上位于航跡點(diǎn)處的距離偏差,如圖2 所示。由此可見,各方向上的循跡偏差均值分別是0.36 m、0.15 m、0.18 m;X 方向和Z方向上的循跡偏差最大值不超過1 m,而Y 方向上始終小于0.5 m;除起飛點(diǎn)和降落點(diǎn)外,最小循跡偏差發(fā)生在Z 方向上,僅有0.13 m。所提方法通過引導(dǎo)濾波技術(shù),使輸出圖像的梯度信息等同于輸入圖像,為自動(dòng)控制提供了較高質(zhì)量的圖像依據(jù)。在自主循跡策略和控制量計(jì)算結(jié)果的支持下,極大程度地減小了誤差的波動(dòng)范圍,使無人機(jī)實(shí)現(xiàn)了預(yù)期的自主循跡效果。
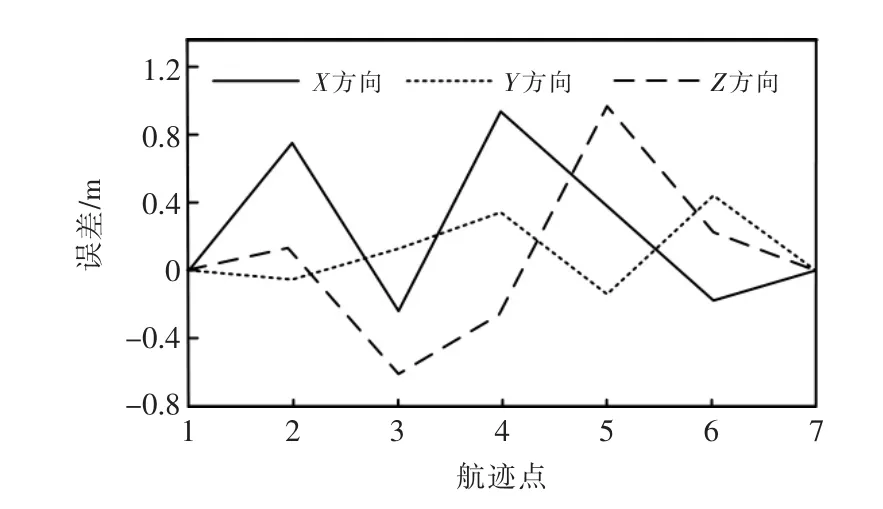
圖2 不同方向上的位置偏差示意圖Fig.2 Schematic diagram of position deviation in different directions
3.3 自動(dòng)控制角度與角速度分析
該實(shí)驗(yàn)環(huán)節(jié)從橫滾角、俯仰角、偏航角的偏差及對應(yīng)角速度偏差等方面,測試所提方法對無人機(jī)姿態(tài)的自動(dòng)控制性能,以加強(qiáng)檢驗(yàn)結(jié)果的可信度。位于航跡點(diǎn)處循跡軌跡各指標(biāo)與理想軌跡的偏差結(jié)果如圖3 所示。由此可見,各姿態(tài)角度偏差的波動(dòng)范圍分別是-0.4°~+2.7°、-2.25°~+2.3°、-0.54°~+0.83°,對應(yīng)角速度的平均偏差分別是2.01°/s、1.62°/s、0.58°/s。所提方法通過去噪處理較好地保留了邊緣細(xì)節(jié),并根據(jù)精準(zhǔn)檢測到的循跡目標(biāo),通過自主循跡策略和雙環(huán)控制器,在最大程度上抵消了外界風(fēng)力的干擾,從而準(zhǔn)確地完成了巡檢無人機(jī)的姿態(tài)控制,有效地將不同姿態(tài)的角度及角速度偏差穩(wěn)定控制在實(shí)際工程允許的范圍內(nèi)。
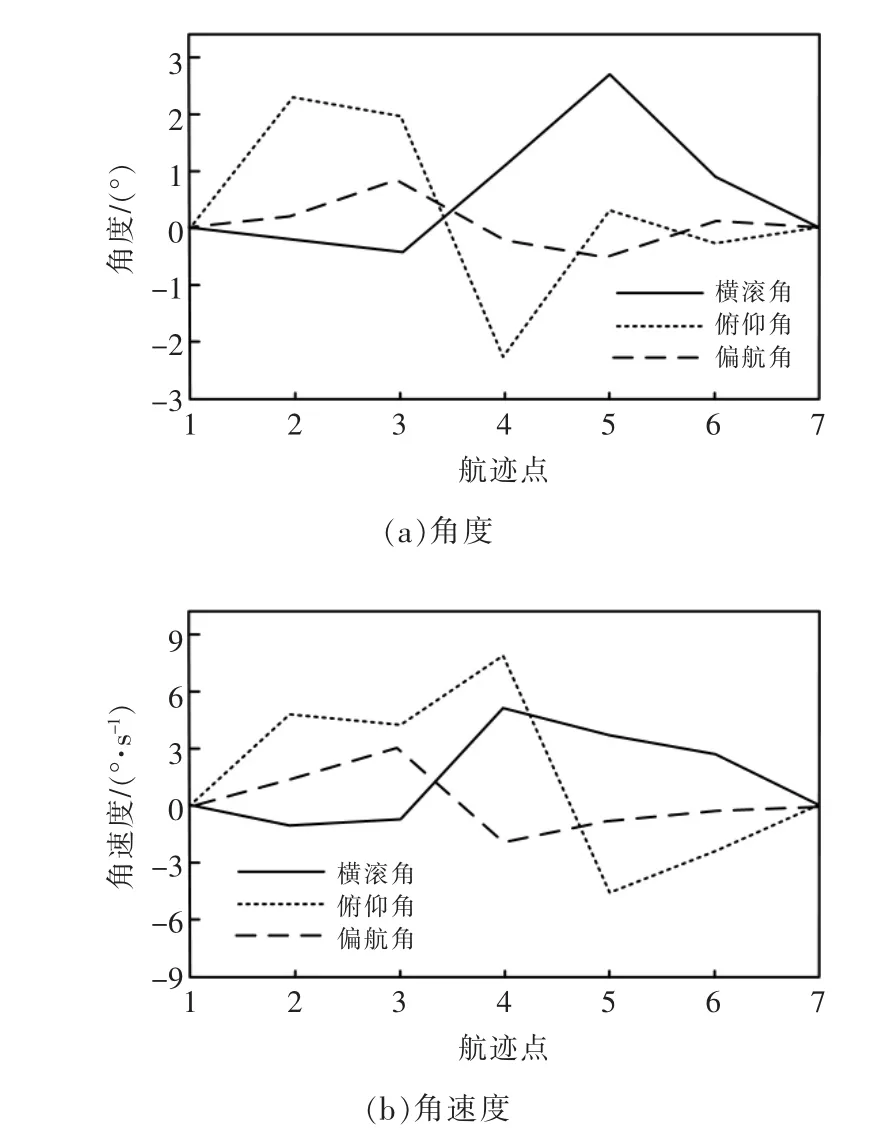
圖3 不同姿態(tài)偏差示意圖Fig.3 Schematic diagram of different attitude deviations
4 結(jié)語
無人機(jī)憑借遙控站的遠(yuǎn)距離操控特點(diǎn),從根本上解決了航空安全問題。飛行控制技術(shù)作為無人機(jī)的核心,對飛行軌跡和姿態(tài)有著決定性的作用。隨著通信、控制等技術(shù)的迅猛發(fā)展,無人機(jī)控制技術(shù)受到了高度重視。特別是在工業(yè)機(jī)械化的推動(dòng)下,無人機(jī)在大中型機(jī)械設(shè)備的巡檢任務(wù)中占據(jù)主導(dǎo)地位,為設(shè)施安全管理提供了有效助力。為進(jìn)一步提高無人機(jī)的巡檢工作質(zhì)量,提出自主循跡自動(dòng)控制方法,并通過實(shí)驗(yàn)驗(yàn)證了該方法的有效性。在未來的研究過程中需要對障礙物感知與自主規(guī)避功能、基于恒定和復(fù)雜風(fēng)干擾免疫功能的風(fēng)干擾模型等方向展開深入探討,加強(qiáng)控制器控制律的魯棒性,從而全面提升無人機(jī)的控制性能和水平,使其能適用于更多的行業(yè)領(lǐng)域。
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48