總相位滯后角-延時關系下的電子機械制動主控制器控制方法
2024-01-27 02:58:42孫文革
自動化與儀表 2024年1期
孫文革
(新疆職業大學 機械電子工程學院,烏魯木齊 830013)
EMB 是目前機械制動科技的主要研發領域。在電子機械制動系統中,由于網絡傳輸、數據處理等因素的影響,存在一定的延時控制問題,其精確性直接影響其制動性能和制動穩定性,為此對電子機械制動主控制器延時控制研究,具有重要意義。
為此,文獻[1]利用雙目標非支配排序遺傳算法,優化主控制器控制參數,以漸近約束支配法則為依據實現主控制器延時的主動控制,該方法計算復雜度較高;文獻[2]利用電動機速度和電壓的信息確定電子機械制動的制動摩擦片與制動盤的碰撞、分離臨界點,構建數學模型,在Matlab/Simulink 環境下設計EMB 主控制器延時控制策略。該方法忽略了電子機械制動自身的制動特性對主控制器帶來的影響,延時控制效果較差。
為了解決上述方法中存在的問題,提出電子機械制動主控制器的延時主動控制方法。針對電子機械制動系統在延時情況下的控制問題深入分析和研究,采用狀態觀測器獲取電子機械制動系統的狀態估計值,實現在延時情況下的主動控制。
1 電子機械制動(EMB)總相位滯后角-延時關系
控制電子機械制動主控制器延時時,需要考慮電機堵轉轉矩、電機摩擦、傳動機構和制動機構對電子機械制動的影響,這些因素直接影響制動EMB的響應時間和制動效果。
(1)如果電機堵轉轉矩較大,制動系統啟動或停止的響應時間可能會增加,從而導致延時。因此,考慮電機堵轉轉矩,以確保及時采取適當的制動措施。
(2)電機摩擦會使電機的運動減速,從而影響制動系統的響應時間和制動力的實際輸出。因此,考慮電機摩擦對制動系統的影響,以保證延時控制準確性。
(3)傳動機構將電機的旋轉運動傳遞到制動機構上,影響制動力的實際輸出。較低的傳動效率會導致制動系統的能量損失增加,也可能增加滯后角。
(4)制動機構是實現制動操作的關鍵組成部分,若制動系統無法及時響應,會導致延時和滯后角的增加。
EMB 是一種利用電驅動元件實現車輛制動的機電一體化系統[3-4],主要構成部件有驅動電機、滾珠絲杠、行星輪、太陽輪、制動襯塊與制動盤等,結構如圖1 所示,工作原理如圖2 所示。
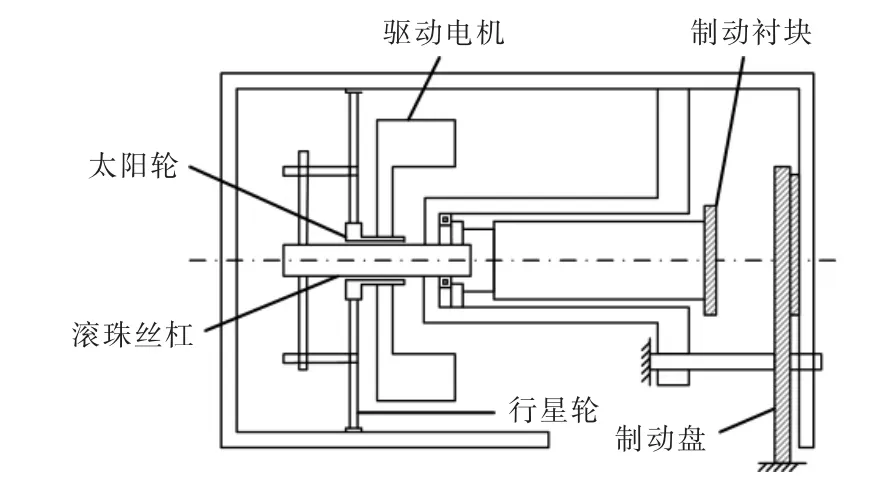
圖1 EMB 結構圖Fig.1 EMB structure diagram
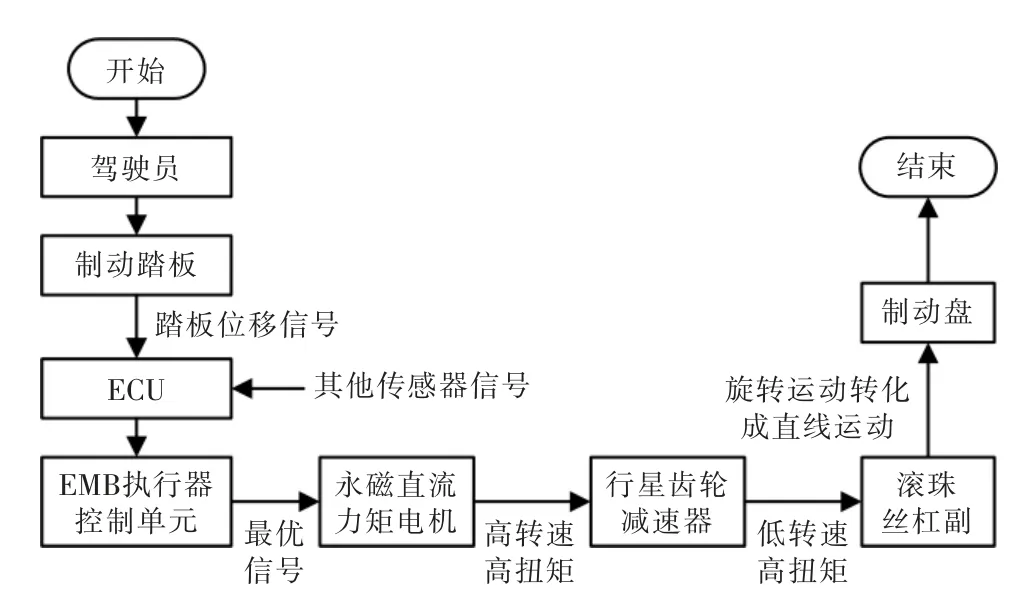
圖2 EMB 工作流程Fig.2 EMB work flow chart
分別從驅動電機、電機摩擦、傳動機構以及制動過程4 個方面分析EMB 的運行影響因素。
(1)驅動電機
驅動電機是制動系統中的核心組件,其提供制動力和運動控制[5-6]。永磁直流力矩電機通常具有高啟動轉矩,對于電子機械制動系統來說,能夠在短時間內快速啟動和增加制動力度,以滿足緊急情況下的需要。因此,采用永磁直流力矩電機作為電子機械制動的驅動電機[7],其工作原理如圖3 所示。
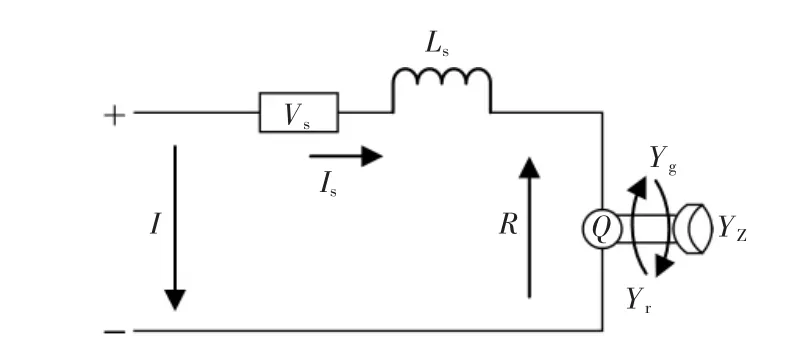
圖3 永磁直流力矩電機工作原理Fig.3 Working principle of permanent magnet DC torque motor
為了解驅動電機的內部特性和響應,將電機工作狀態下的電樞電感電壓、電機力矩以及電機堵轉轉矩用動態方程表示如下。
電樞電感電壓方程:
式中:R 代表反電動勢;Ls、Is、Vs分別表示電樞的電感、電流以及電壓。
利用電樞電感電壓建立電機力矩方程:
式中:Kq用于表示電機轉子的轉動慣量;Yr、Yg、YZ分別表示電機的電磁轉矩、摩擦轉矩、負載轉矩;ξq代表總相位滯后角。
結合電機轉子的轉動慣量建立電機堵轉轉矩方程:
式中:Ly代表電機力矩系數。
(2)電機摩擦
電機在運動時會產生摩擦力,影響制動系統的性能和準確性[8-9]。由于實際的電機摩擦通常包括不同類型的摩擦現象,為了更逼近真實的電機摩擦特性,采用靜摩擦+庫倫摩擦+粘滯摩擦相結合的方式表征電機摩擦,電機摩擦結構如圖4 所示。
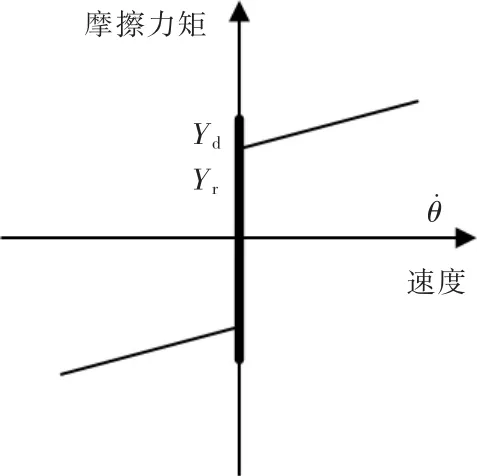
圖4 電機摩擦結構圖Fig.4 Friction structure of motor
通過圖4 能夠真實地模擬出電機在工作過程中產生的摩擦力矩,可表示為
式中:θ˙代表電機相對滑動速度;Yd表示其最大靜摩擦總相位滯后角;Lb代表粘滯摩擦系數。
當電機摩擦較大時,制動系統的動態響應可能變得不穩定,導致滯后角增加。
(3)傳動機構
電子機械制動結構的傳動機構[10]通常包括行星輪和太陽輪。太陽輪從電機輸入動力,而行星輪通過內部齒輪組和輸出軸將動力輸出到制動裝置上。傳動機構的輸入端與一臺永磁直流力矩電機轉子相連接,輸出端與一對滾珠絲杠相連接。滾珠絲杠副等效為剛性結構,連接在行星齒輪架上,以螺母平動方式旋轉運動的絲杠轉角?m和螺母位移x 所構成的傳動機構表達式如下:
式中:o 表示行星齒輪減速器傳動比;Z 為絲杠螺紋導程;?q表示電機總相位滯后角。
(4)制動過程
電子機械制動系統的主要功能是把電機產生的轉矩轉換為一種針對于制動盤的夾緊力矩[11],以執行剎車制動操作,制動盤產生的夾緊力G 和螺母位移x 的關系為
式中:LG代表夾緊力總相位滯后角。
根據獲取的電機在工作過程中產生的摩擦力矩及電機力矩與電機堵轉轉矩,制動過程表達為
2 主控制器延時控制方法設計
主控制器是EMB 的主控制器,當主控制器出現過長延時時,將會直接影響EMB 中的傳動機構運作性能。在分析電子機械制動總相位滯后角-延時關系下的基礎上,為了更好地實現對主控制器網絡延時的控制,需要分析兩者之間的直接量化關系。
轉速是電機控制中的重要參數,PI 調節器可以控制轉速,使轉速調節器具備較快的響應速度和較小的超調量。采用PI 調節器[12]控制,將轉速考慮在內,用傳遞函數表示為
式中:LA、LO為轉速調節器的比例以及積分系數;d為主控制器網絡延時系數。
引入延時系數構建傳遞函數,而總相位滯后角是頻率響應中相位隨頻率變化的特征之一。當相位滯后角超過一定閾值時,系統可能產生振蕩或不穩定的行為。用?ASR、?Delay分別表示轉速調節器自身和主控負控制器網絡延時各自引入的相位滯后角[13],其中0<?ASR<90°,0<?Delay<90°,計算總相位滯后角β表達式為
式中:τ 為延時誤差補償角。分析式(9)可知,0<β<180°。
以Td為周期在主控制器的接收端設置一個用于讀取數據的寄存器,利用總相位滯后角β 約束制動狀態空間,并以該周期離散化電子機械制動系統,得到一種離散表達式為
式中:l 表示當前時刻;t 表示當前狀態;S、N 為EMB的適維參數矩陣,且S、N∈Rm×m,表示其狀態空間。
在延時狀態下,得到的EMB 輸出相應變為y[l-τ(l)],τ(l)表示當前網絡延時。
計算二者關系的具體步驟如下:
設定一個狀態觀測器,初步獲取電子機械制動狀態估計值:
式中:Z 代表觀測器增益。在此基礎上,進一步預測l時刻EMB 的總相位滯后角量化關系狀態值:
為有效補償電子機械制動狀態估計誤差,將電機堵轉轉矩、電機摩擦、傳動、制動的影響作為參量,結合狀態觀測器與預測時刻的EMB 狀態,得到總相位滯后角量化關系最終的預測值:
利用獲取的最終的預測值和控制理論能夠設計出主控制器延時的具體控制規律,實現延時控制,利用主控制器增益控制EMB 主控制器的延時T,表達式為
式中:L 為主控制器增益。
3 實驗與分析
為了驗證所提方法的整體有效性,需要對其作相關測試。選取LabVIEW 作為實驗仿真環境,其能夠實現機械制動系統的控制。根據主控制器延時對電子機械制動產生的影響和延時控制的重要性,實驗從以下3 個方面驗證所提方法的有效性,實驗模擬圖如圖5 所示。
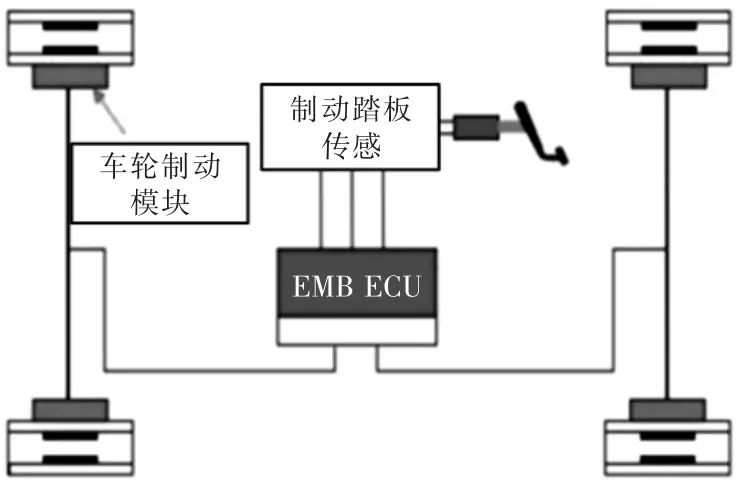
圖5 實驗模擬圖Fig.5 Experimental simulation diagram
3.1 延時狀況評估
延時指網絡中的數據從網絡的一端傳輸到另一端所消耗的時間,延時狀況能夠體現出主控制器網絡延時的控制方法是否有效,實驗值越低,控制效果越好。以某客車的電子機械制動系統為研究對象,將其主控制器網絡延時作為評估指標,在制動時間不斷增加的條件下,所提方法的延時狀況如圖6 所示。
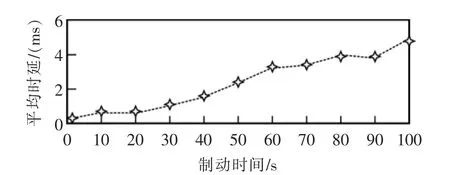
圖6 所提方法延時結果Fig.6 Delay results of proposed method
分析圖6 可知,隨著時間的增加,采用所提方法控制下的主控制器網絡延時有所加大,但最長延時僅為5 ms,具有更好的控制效果,在主控制器網絡延時控制上,效果相對最佳,且處于非常平穩的運行狀態。
3.2 制動距離及滑移率對比
制動距離是指恒定速度行駛的車輛從制動啟動到完全停止后所行過的路程距離,若距離越短,則說明制動性能越好;滑移率描述在制動過程中,隨著車輪的縱向移動,滑移分量所占的比例,在15%~20%范圍內,制動效果最好。
采取與上述實驗相同的測試環境,在干混凝土路面上測試,預設車輛的初始速度、車輪半徑以及轉動慣量分別為85 km/h、0.285 m、0.75 kg/m2,并以此得到所提方法控制下的制動距離測試結果和滑移率測試結果,分別如圖7 和圖8 所示。
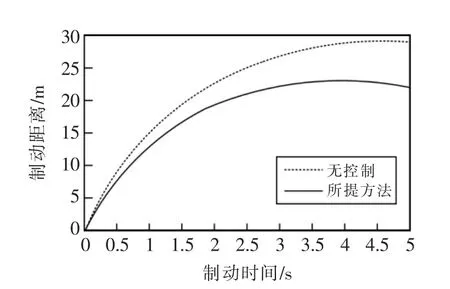
圖7 制動距離效果比較Fig.7 Braking distance effect comparison
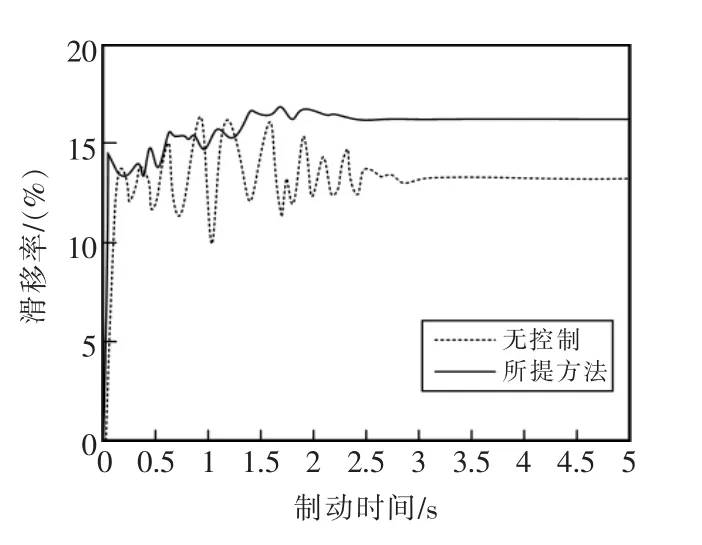
圖8 滑移率結果比較Fig.8 Comparison of slip ratio results
根據圖7 與圖8 可知,所提方法使得制動距離縮短了8.29 m,制動性能效果更好;同時在此條件下,滑移率也更快地達到最佳狀態(15%~20%范圍內),能夠更高效地控制延時,增強了制動穩定性。
3.3 穩定收斂時間對比
對主控制器延時的控制效果越好,電子機械制動系統達到穩定狀態所需的時間越短,因此實驗將系統達到穩定所需的時間作為測試指標展開1000次測試,分析在所提方法控制下,制動系統達到穩定狀態所需的時間,如表1 所示。
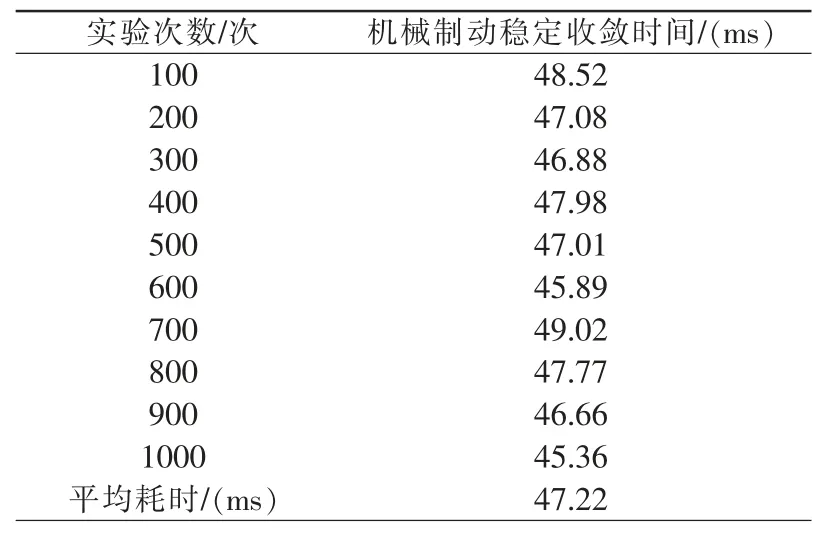
表1 所提方法控制下系統性能Tab.1 System performance is controlled by the proposed method
分析表1 可知,1000 次測試,所提方法能夠在較短的時間內,使電子機械制動系統達到穩定的狀態,平均耗時為47.22 ms,說明所提方法具有更好的主控制器延時控制效果,進一步地提高了電子機械制動穩定性和主控制器延時控制效率。
4 結語
主控制器延時的有效控制是提高電子機械制動過程穩定性和安全性的關鍵,為此,提出電子機械制動主控制器延時主動控制研究。通過分析電子機械制動影響因素,分析主控制器延時對電子機械制動系統產生的影響;利用觀測器控制網絡延時的方法實現電子機械制動主控制器延時的主動控制。本方法解決了傳統方法的不足,具有重要的實際應用意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12