磁浮列車機械制動系統交叉耦合控制方法
2024-01-27 02:58:44韓得水賈學梅袁春生
自動化與儀表 2024年1期
韓得水,李 寧,賈學梅,袁春生
(中車工業研究院(青島)有限公司,青島 266109)
磁浮列車是一種基于磁懸浮技術[1]的新型交通運輸方式,利用磁力和電力懸浮在軌道上,通過電磁力驅動列車運行,具有速度快、能耗低、環保性強等優勢,是未來城市交通的重要發展方向。磁浮列車在高速運行時需要具備可靠的制動力,確保安全停車和緊急停止。機械制動系統的控制器能夠提供制動力滿足列車的停車和減速需求。為了保障磁浮列車的安全運行,需要對磁浮列車機械制動系統進行控制。
文獻[2]以磁浮列車機械制動系統速度跟蹤快速控制為目標,利用自抗擾控制理論對控制器實施分解和改進,得到其相應的傳遞函數。對控制器結構實施優化,使其傳遞函數等效。在此基礎上,引入一階慣性環節加時滯環節(FOPTD)模型調整自抗擾控制器參數,實現對磁浮列車機械制動系統的速度跟蹤控制。經該方法控制后的系統穩定性得不到保障;文獻[3]提出基于反步法的磁浮列車機械制動體系控制方法。通過等效連續化和線性化出力構建ECP 的制動系統控制模式。引用已知上界的不確定點,并利用指數趨近定律的光滑模變結構實現對系統的局部魯棒特征優化。設計控制律,并引入誤差變量、Lyapunov 變量和一階濾波器實施調控。該方法的操作耗時較長,整體控制效果也較低;文獻[4]根據磁浮列車運行的周期性,對其機械制動系統實施運行控制。構建周期自適應補償控制器。在電路數據未知的情況下通過該傳感器學習上一個周期內的數據。估算出線路上增加阻力的未知值,減少對其所產生的干擾,進而實現機械制動系統的運行控制。該方法抗干擾能力較差。
為此,提出磁浮列車機械制動系統交叉耦合控制方法。
1 磁浮列車機械制動系統傳遞函數獲取
在機械制動系統交叉耦合控制中,通過獲取磁浮列車機械制動系統傳遞函數,得到不同系統參數對系統制動減速度的影響,為后續設計交叉耦合控制方法提供依據。機械制動系統是保障磁浮列車運行安全的關鍵系統,通常采用壓力式制動方式[5],該制動方式的可控性較強,機械制動系統結構框圖如圖1 所示。
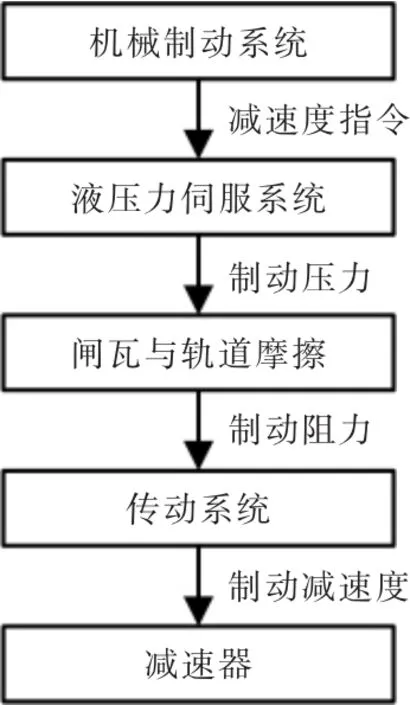
圖1 機械制動系統結構框架Fig.1 Structural framework of mechanical braking system
根據圖1 的機械制動系統結構框架,計算液壓力伺服系統的傳遞函數如式(1)所示:
式中:Po和Lo代表液壓力伺服系統的液壓缸工作面積和負載剛度;Lf、Lc、Ls代表力傳感器、伺服閥以及放大器的增益;ξ 為滑閥流量增益與其流量壓力系數的比值;H(s)代表的是液壓力伺服系統的傳遞函數;s 描述的是滑閥流量壓力系數;Q1、V 分別代表的是運動部件質量和液壓油壓縮系數。
深度負反饋下的液壓力伺服系統[6]描述為一種近似理想的放大環節,為此將其簡化為
閘瓦相對速度μ 和閘瓦與軌道之間的摩擦系數ν[7]之間存在一定的關聯性和非線性關系,其數學表達式如式(3)所示:
式中:S 代表閘瓦位移量。
在獲取閘瓦與軌道之間的摩擦系數后,通過傳動系統[8]制動阻力使車輛產生制動減速度,從而實現列車的減速和停車。由于列車總質量在制動過程中不會發生變化,因此可以將磁浮列車制動過程中列車實測總質量和參考總質量間的偏差值描述為一種靜態誤差,而實際摩擦系數與參考摩擦系數間的偏差為動態誤差。
由此得到磁浮列車機械制動系統傳遞函數,如式(4)所示:
式中:o 代表制動減速度;i 代表制動減速度指令。
2 機械制動系統交叉耦合控制
利用磁浮列車機械制動系統傳遞函數設計合適的控制器,選擇適當的控制策略,并確定控制參數。
2.1 控制方法設計
系統的摩擦系數和列車的總質量之間存在一定的耦合關系,無法較好地進行匹配,且磁懸浮過程中產生的不確定性擾動導致氣隙同步誤差較大[9-10],為此,建立氣隙、速度雙重交叉耦合控制器,實時計算控制參數間的同步誤差,建立所有參數之間的協調關系,實現同步誤差補償,提高控制精度。具體過程為
(1)氣隙控制
磁浮列車機械制動系統存在摩擦形式的制動器和軌道之間的氣隙,會引起制動器連續力的不連續性,從而影響到列車的正常運行。為此,定義氣隙同步控制目標以及同步函數:
展開上述同步函數泰勒級數得到氣隙同步誤差計算表達式如式(6)所示:
(2)氣隙、速度雙重交叉耦合控制器
在引入氣隙控制后,磁浮列車機械制動系統的氣隙同步性能有所改善,并有效降低了系統阻尼[11],而系統阻尼的主要來源為列車的速度信號,為此需要進一步地引入氣隙、速度雙重交叉耦合控制器。
設置速度同步誤差φv,并與氣隙耦合項相結合,生成同步誤差φs=φo′+φv,通過耦合自動控制器對其展開相應處理,得到耦合項,生成交叉耦合控制y′=y+lsφs,其中y 為控制輸入,ls為交叉耦合控制器增益。該交叉耦合控制器框圖如圖2 所示。
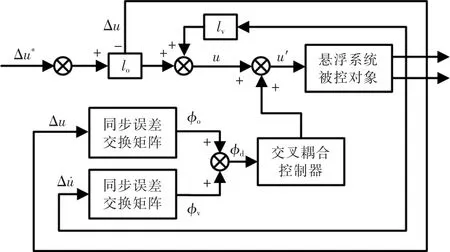
圖2 交叉耦合控制器框圖Fig.2 Cross coupling controller block diagram
考慮到電流反饋[12-13]對電感時間常數的影響,在上述控制中引入擾動量ΔOf用于等效實際外力擾動,如式(7)所示:
式中:lo和lv為氣隙、速度交叉耦合的反饋增益。
(3)交叉耦合控制結果
機械制動系統的閉環輸出為
式中:Hc(s)代表氣隙輸出的傳遞函數。在此基礎上,引入交叉耦合控制,得到閉環系統交叉耦合控制結果:
式中:q 代表閉環控制系數;T 代表反饋信號;ld為交叉耦合控制參數。
其約束條件為
在引入交叉耦合控制后,若T>Z,則機械制動系統保持穩定狀態,對交叉耦合控制參數ld實施調節,實現磁浮列車機械制動系統控制。
2.2 交叉耦合參數尋優
通過交叉耦合控制參數ld控制磁浮列車機械制動系統時,由于參數之間相互關聯,需要綜合考慮不同參數的取值,增加了參數調節的難度。交叉耦合參數尋優能夠自動選擇合適的參數整定結果,為此,利用參數尋優獲得更精確的控制效果,保障機械制動系統控制精度。FOA[14-16]能夠在提高響應速度的同時,將交叉耦合控制誤差控制在最小范圍,具有較強的全局搜索能力。為驗證該算法的性能,以ITAE 最優傳遞函數JITAE作為交叉耦合控制器的性能評價指標:
式中:r(a)代表的是輸入值和輸出值的差值。
針對交叉耦合控制參數ld,FOA 算法的具體實現步驟為
(1)設定果蠅種群規模sizepop 以及最大迭代次數maxgen;
(2)初始化果蠅群的隨機位置Kld;
(3)隨機分配Kld的值:
(4)將得到的Kld值引入到交叉耦合控制器中,求出該果蠅個體相應的控制誤差值JITAE;
(5)將果蠅群體尋找到的最優值作為誤差最小值;
(6)根據誤差最小值重新設定Kld值;
(7)反復實施步驟(4)~步驟(6),以此展開迭代尋優,在此基礎上,若當前誤差最小值為最優值,實施步驟(6)結束迭代尋優,獲取交叉耦合控制的最優參數,進而實現機械制動系統的高精度控制,提高系統的安全性。
3 實驗與分析
為了驗證磁浮列車機械制動系統交叉耦合控制方法的整體有效性,需要對其展開測試。
以某市磁浮列車的原始機械制動系統數據為基礎,設定果蠅群體規模為40,利用所提方法提供的交叉耦合控制參數尋優算法實施參數的迭代更新,100 次迭代計算的精度測試如圖3 所。
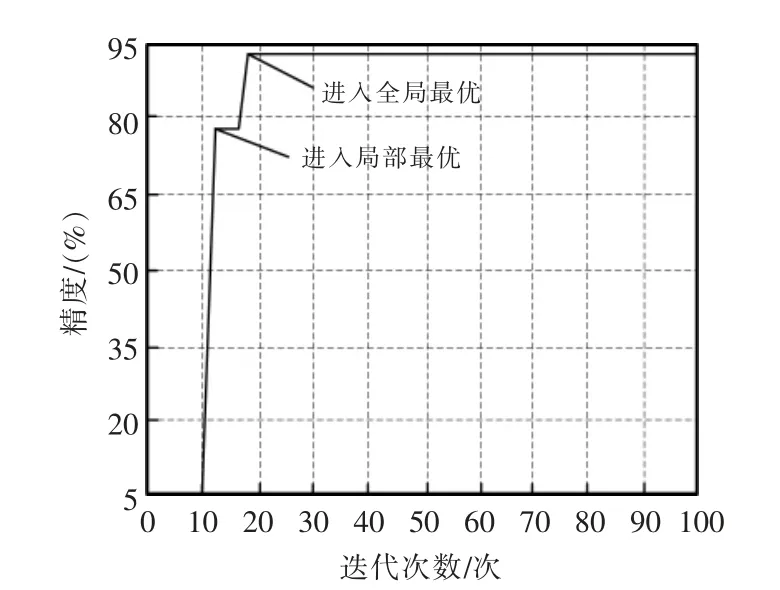
圖3 100 次迭代計算的精度測試Fig.3 Accuracy test for 100 iterative calculations
通過圖3 可知,所提方法能夠在較短的迭代過程中實現收斂,僅通過12 次迭代,精度便從初始的5%上升至78%,進入局部最優解,而后迭代至18 次跳出局部最優,其目標參數成功收斂到全局最優,且精度維持在90%以上,說明所提方法能夠提高控制精度。
在此基礎上,驗證所提方法的應用效果,利用所提方法完成磁浮列車機械制動系統交叉耦合控制的控制精度和效率兩方面的測試。
(1)控制精度
采用所提方法對磁浮列車機械制動系統展開同步控制,以同步誤差為測試指標,在系統受到1000 N 階躍干擾以及周期為5 s 的周期擾動時,得到所提方法的同步誤差,如圖4 所示。
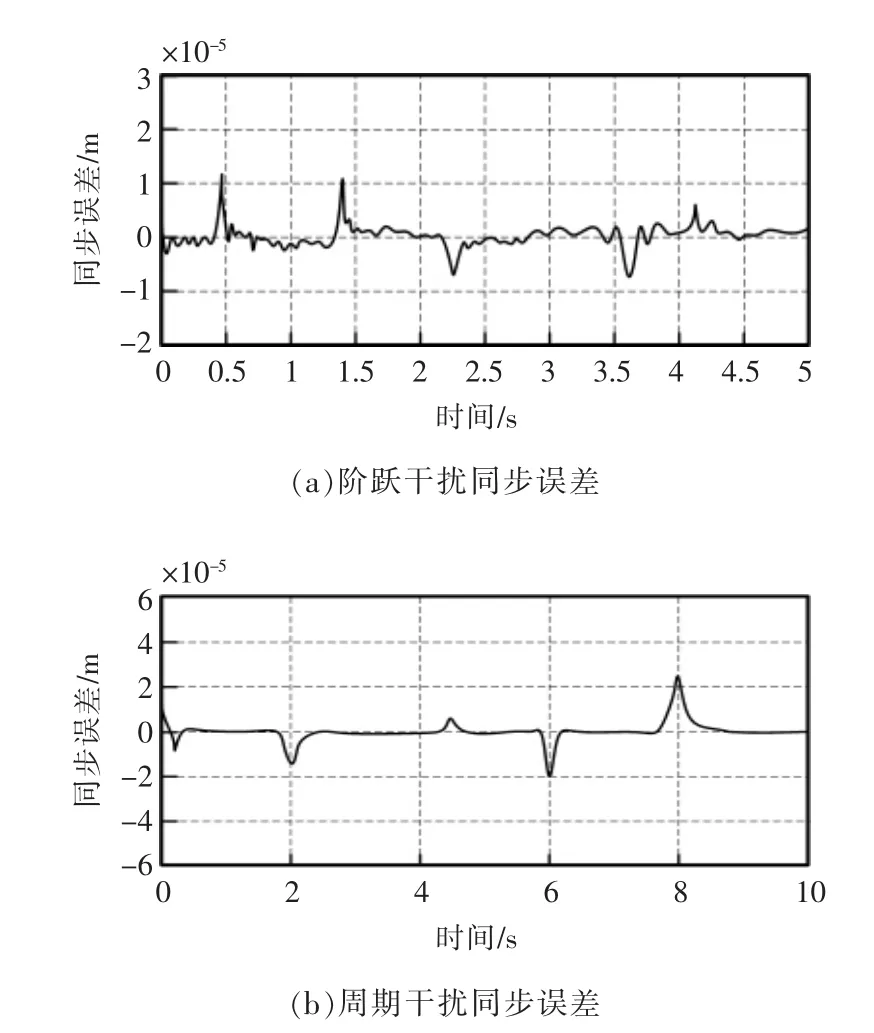
圖4 所提方法同步誤差Fig.4 Synchronization error of proposed method
分析圖4 可知,采用所提方法能夠使系統在受到不同干擾時均具有較高的同步跟蹤性能,說明所提方法具有更高的控制精度。
(2)效率對比
進一步分析所提方法的性能,機械制動系統達到穩態的響應時間為衡量效率的重要指標,因此將其作為評價指標,通過10 次測試,所提方法達到穩態時間如表1 所示。
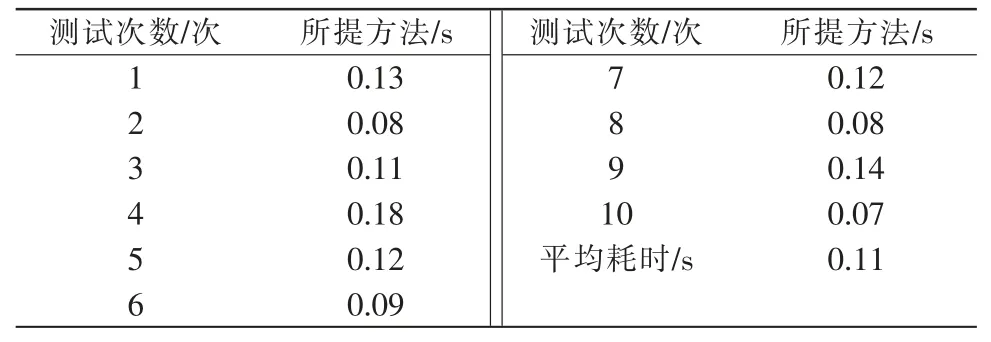
表1 所提方法達到穩態時間Tab.1 Time for proposed method to reach steady state
分析表1 可知,經過10 次測試,所提方法能夠有效地考慮到磁浮列車機械制動系統的控制參數同步不確定性,使系統達到穩態所需的時間均在0.15 s 以內,平均耗時為0.11 s,具有較高的效率。
4 結語
提出磁浮列車機械制動系統交叉耦合控制方法。通過獲取機械制動系統傳遞函數,引入氣隙、速度雙重交叉耦合控制器實行控制。采用FOA 獲取控制器的最優控制參數,實現磁浮列車機械制動系統的交叉耦合控制。所提方法在一定程度上提高了控制精度和效率。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代工人(2020年8期)2020-05-25 09:07:38
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(2017年9期)2017-09-26 03:41:45
科技知識動漫(2016年8期)2016-07-29 20:40:09
Coco薇(2016年2期)2016-03-22 02:42:52
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
Coco薇(2015年1期)2015-08-13 02:47:34