并網(wǎng)光伏發(fā)電機(jī)組中旋轉(zhuǎn)機(jī)械驅(qū)動(dòng)控制方法研究
2024-01-27 02:58:46劉偉
自動(dòng)化與儀表 2024年1期
劉 偉
(新疆天富集團(tuán)有限責(zé)任公司,石河子 832000)
并網(wǎng)光伏發(fā)電機(jī)組作為一個(gè)規(guī)模超大的并網(wǎng)發(fā)電系統(tǒng),主要作用是將光伏陣列裝置接收到的太陽能輻射轉(zhuǎn)化為高電壓直流電,并經(jīng)過逆變器的反向轉(zhuǎn)化后將電壓同頻同相的正弦型交流電流輸入到電力系統(tǒng)中。但其在戶外環(huán)境中易受到強(qiáng)風(fēng)、暴雨、沙塵等因素影響,引發(fā)旋轉(zhuǎn)機(jī)械的動(dòng)不平衡問題。為了提高并網(wǎng)光伏發(fā)電機(jī)組的工作效率,保障其安全穩(wěn)定運(yùn)行,相關(guān)專家學(xué)者對(duì)并網(wǎng)光伏發(fā)電機(jī)組旋轉(zhuǎn)機(jī)械驅(qū)動(dòng)控制方法展開了深入研究[1-2]。
本文針對(duì)并網(wǎng)光伏發(fā)電機(jī)組旋轉(zhuǎn)機(jī)械提出一種新的驅(qū)動(dòng)控制方法。為了準(zhǔn)確評(píng)估旋轉(zhuǎn)機(jī)械的運(yùn)行狀態(tài)和性能,計(jì)算并網(wǎng)光伏發(fā)電機(jī)組暫態(tài)響應(yīng)和旋轉(zhuǎn)機(jī)械動(dòng)不平衡量,得到發(fā)電機(jī)組在自然坐標(biāo)系、原始坐標(biāo)系以及旋轉(zhuǎn)坐標(biāo)系下的不同運(yùn)動(dòng)狀態(tài),將虛擬同步發(fā)電機(jī)(virtual synchronous generator,VSG)本體算法和VSG 控制策略結(jié)合在一起,構(gòu)建基于VSG 的旋轉(zhuǎn)機(jī)械驅(qū)動(dòng)控制模型,對(duì)驅(qū)動(dòng)控制輸出結(jié)果進(jìn)行計(jì)算,完成旋轉(zhuǎn)機(jī)械的精準(zhǔn)驅(qū)動(dòng)控制。
1 旋轉(zhuǎn)機(jī)械運(yùn)行狀態(tài)分析
1.1 并網(wǎng)光伏發(fā)電機(jī)組暫態(tài)響應(yīng)計(jì)算
并網(wǎng)光伏發(fā)電機(jī)組是由若干個(gè)光伏組件、前級(jí)Boost 變換器和后級(jí)逆變器組成的大規(guī)模并網(wǎng)發(fā)電系統(tǒng)。與傳統(tǒng)靜止式發(fā)電機(jī)相比,在暫態(tài)電壓調(diào)度和一次能源的蓄電強(qiáng)度方面具有無法比擬的優(yōu)勢(shì)。當(dāng)發(fā)電機(jī)組中的旋轉(zhuǎn)機(jī)械開始運(yùn)行時(shí),需要對(duì)接入式電力系統(tǒng)低壓側(cè)和高壓側(cè)直流母線[3-4]的電容值同時(shí)測(cè)量,以保證能量轉(zhuǎn)化過程中的等效電壓和等效電流始終保持在額定電壓和額定電流以下。光伏組件的作用是對(duì)機(jī)組光伏滲透率進(jìn)行疊加計(jì)算,以確保接入式電力系統(tǒng)直流母線電壓始終平穩(wěn),光伏滲透率[5]疊加計(jì)算公式為
式中:α 表示電力系統(tǒng)穩(wěn)定運(yùn)行狀態(tài)下的功角;q 表示并網(wǎng)變換器的勵(lì)磁電勢(shì)幅值;Δt 表示直流電壓的時(shí)間尺度;θi表示出口電壓基波分量。
設(shè)直流母線的電容值為ι,獲取并網(wǎng)光伏發(fā)電機(jī)組暫態(tài)響應(yīng)計(jì)算公式為
式中:Δω 表示直流電容的參考電壓;pi表示并網(wǎng)變換器的電壓等級(jí);pj表示電網(wǎng)電壓與輸出電壓之間的相位角。
1.2 旋轉(zhuǎn)機(jī)械動(dòng)不平衡量計(jì)算
通過計(jì)算暫態(tài)響應(yīng),了解發(fā)電機(jī)組輸出電流和電壓發(fā)生的暫態(tài)波動(dòng)情況,將其輸入至動(dòng)不平衡量目標(biāo)模型中,獲取準(zhǔn)確的動(dòng)態(tài)不平衡狀況與條件。為此,參考機(jī)械運(yùn)動(dòng)學(xué)理論,對(duì)旋轉(zhuǎn)機(jī)械的動(dòng)平衡模型[6]進(jìn)行建模,計(jì)算旋轉(zhuǎn)機(jī)械動(dòng)不平衡量,以減小不平衡帶來的負(fù)面影響。建立的目標(biāo)模型如式(3)所示:
基于建立的旋轉(zhuǎn)機(jī)械的動(dòng)平衡模型,確定干擾力矩的分布情況,得到旋轉(zhuǎn)機(jī)械動(dòng)不平衡量為
式中:δi,j表示第i 個(gè)旋轉(zhuǎn)軸中第j 個(gè)干擾力矩的位置信號(hào)表示旋轉(zhuǎn)軸轉(zhuǎn)角擾動(dòng)系數(shù)表示旋轉(zhuǎn)軸的轉(zhuǎn)角。
1.3 獲取旋轉(zhuǎn)機(jī)械的運(yùn)行狀態(tài)
旋轉(zhuǎn)機(jī)械由轉(zhuǎn)子、定子、轉(zhuǎn)軸以及永磁體組合而成,具有多變量、強(qiáng)耦合和非線性特征。通過計(jì)算并網(wǎng)光伏發(fā)電機(jī)組的暫態(tài)響應(yīng)和旋轉(zhuǎn)機(jī)械動(dòng)不平衡量,可以評(píng)估旋轉(zhuǎn)機(jī)械的運(yùn)行質(zhì)量。以此為基礎(chǔ),對(duì)旋轉(zhuǎn)機(jī)械的內(nèi)部結(jié)構(gòu)建立一個(gè)數(shù)學(xué)模型,用來反映旋轉(zhuǎn)機(jī)械的運(yùn)行狀態(tài),并為驅(qū)動(dòng)控制提供控制主體。
將并網(wǎng)光伏發(fā)電機(jī)組暫態(tài)響應(yīng)及不平衡量輸入旋轉(zhuǎn)坐標(biāo)系中,定義旋轉(zhuǎn)機(jī)械進(jìn)行驅(qū)動(dòng)控制的旋轉(zhuǎn)坐標(biāo)系為H1,靜止的原始坐標(biāo)系[8]為H2,自然坐標(biāo)系為H3,與3 個(gè)坐標(biāo)系對(duì)應(yīng)的旋轉(zhuǎn)機(jī)械電機(jī)三相分別為a、b、c。對(duì)旋轉(zhuǎn)機(jī)械在自然坐標(biāo)系H3下的電子電壓方程進(jìn)行推理,得到:
式中:Ua、Ub、Uc分別表示電機(jī)三相的定子繞組電壓;R 表示電機(jī)三相定子繞組電阻[9];Ia、Ib、Ic分別表示電機(jī)三相的定子繞組相電流;εa、εb、εc分別表示與電機(jī)定子繞組對(duì)應(yīng)的磁鏈向量,表達(dá)公式為
式中:Ka、Kb、Kc分別表示電機(jī)三相繞組自感;φ 表示自然坐標(biāo)系H3下的三相 角;Ja、Jb、Jc分別表示電機(jī)三相繞組互感;φ 表示旋轉(zhuǎn)機(jī)械轉(zhuǎn)子的永磁體磁鏈。
旋轉(zhuǎn)機(jī)械在自然坐標(biāo)系H3下的轉(zhuǎn)矩方程表達(dá)式為
式中:ζ 表示旋轉(zhuǎn)機(jī)械擁有的轉(zhuǎn)子極對(duì)數(shù)。
在Clarke 變換算法的作用下,將自然坐標(biāo)系下的旋轉(zhuǎn)機(jī)械變換到原始坐標(biāo)系中,Clarke 變換方程如式(8)所示:
式中:η(q)表示經(jīng)過Clarke 變換后與自然坐標(biāo)系中三相電流矢量對(duì)應(yīng)的原始坐標(biāo)系中三相電流矢量;A 表示Clarke 變換矩陣;Iabc(q)表示自然坐標(biāo)系中的旋轉(zhuǎn)機(jī)械三相電流矢量。
經(jīng)過式(8)變換后,可得到靜止的原始坐標(biāo)系下的旋轉(zhuǎn)機(jī)械數(shù)學(xué)模型,進(jìn)而推理得到原始坐標(biāo)系下的電壓方程為
式中:Ux、Uy、Uz分別表示旋轉(zhuǎn)機(jī)械在靜止時(shí)的三相等效電壓;Ix、Iy、Iz分別表示旋轉(zhuǎn)機(jī)械在靜止時(shí)的三相等效電流;εx、εy、εz分別表示旋轉(zhuǎn)機(jī)械在靜止時(shí)的三相等效磁鏈[10]。
經(jīng)過Clarke 變換后,式(6)變換為
式中:Kx、Ky、Kz分別表示旋轉(zhuǎn)機(jī)械在靜止時(shí)的三相繞組自感;Jx、Jy、Jz分別表示旋轉(zhuǎn)機(jī)械在靜止時(shí)的三相繞組互感;ρ 表示旋轉(zhuǎn)機(jī)械的轉(zhuǎn)子角速度。
通過Clarke 變換將原始坐標(biāo)系H2中的旋轉(zhuǎn)機(jī)械變換到旋轉(zhuǎn)坐標(biāo)系H1中,使靜止的旋轉(zhuǎn)機(jī)械變換到運(yùn)動(dòng)狀態(tài)下,此時(shí)旋轉(zhuǎn)機(jī)械的運(yùn)行狀態(tài)表達(dá)式為
式中:Gw表示旋轉(zhuǎn)坐標(biāo)系H1下的旋轉(zhuǎn)機(jī)械磁鏈轉(zhuǎn)矩;U、I 分別表示旋轉(zhuǎn)機(jī)械的轉(zhuǎn)子電壓和電流。
通過建立旋轉(zhuǎn)機(jī)械驅(qū)動(dòng)控制模型,可以監(jiān)測(cè)旋轉(zhuǎn)機(jī)械的不同運(yùn)動(dòng)狀態(tài),提高驅(qū)動(dòng)控制的可靠性。
2 并網(wǎng)光伏發(fā)電機(jī)組旋轉(zhuǎn)機(jī)械驅(qū)動(dòng)控制
VSG 中包含了直流電源、輸出LC 濾波器以及電力電子交換器等部件。在變換器中嵌入同步發(fā)生器的方程式,VSG 根據(jù)同步發(fā)生器的特性使直流電源和并網(wǎng)光伏發(fā)電機(jī)之間進(jìn)行功率交換,以此實(shí)現(xiàn)對(duì)旋轉(zhuǎn)機(jī)械的驅(qū)動(dòng)控制。VSG 拓?fù)浣Y(jié)構(gòu)如圖1 所示。
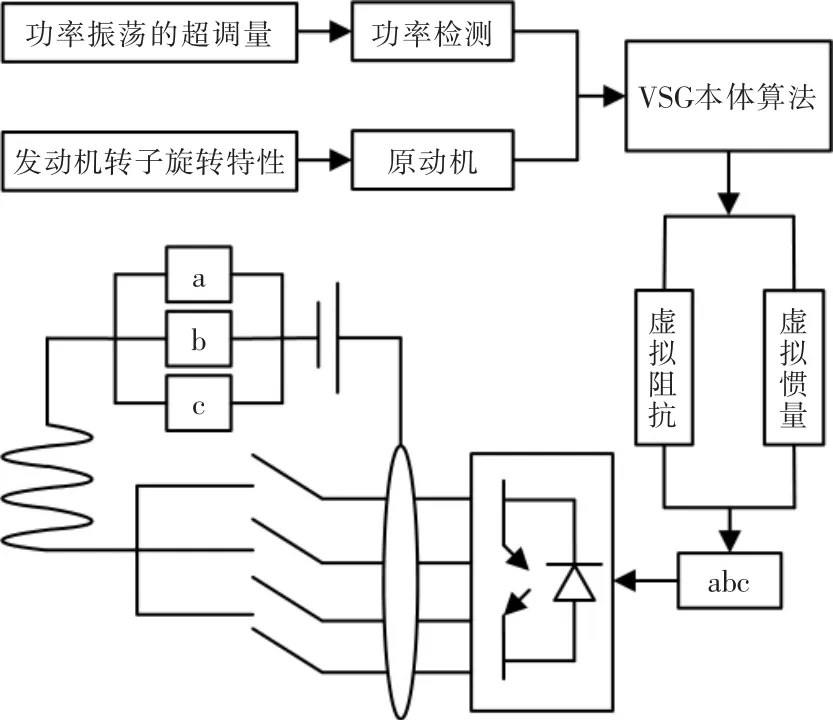
圖1 VSG 拓?fù)浣Y(jié)構(gòu)圖Fig.1 VSG topological structure diagram
二階W、三階S、五階P 模型表達(dá)式分別為
式中:gi表示旋轉(zhuǎn)機(jī)械中轉(zhuǎn)子的轉(zhuǎn)速;ν 表示衰減因子;Δb 表示期望阻尼;λa表示阻尼偏差;o′表示模型的權(quán)重值;u 表示慣性響應(yīng)的時(shí)間間隔;Yn表示旋轉(zhuǎn)機(jī)械轉(zhuǎn)子角頻率基準(zhǔn)值;s1、s2分別表示有功負(fù)荷擾動(dòng)閾值和聯(lián)絡(luò)線功率振蕩幅值。
通過上述技術(shù),建立基于VSG 的旋轉(zhuǎn)機(jī)械驅(qū)動(dòng)控制模型,將VSG 本體算法作為驅(qū)動(dòng)控制的核心算法,同時(shí)結(jié)合VSG 控制策略,得到基于VSG 的旋轉(zhuǎn)機(jī)械驅(qū)動(dòng)控制模型。
VSG 本體算法表達(dá)式如式(13)所示:
式中:μn、μm分別表示旋轉(zhuǎn)機(jī)械轉(zhuǎn)子角速度和線速度;R′表示加入負(fù)荷擾動(dòng)后旋轉(zhuǎn)機(jī)械轉(zhuǎn)子的暫態(tài)持續(xù)時(shí)間。由此,獲取旋轉(zhuǎn)機(jī)械驅(qū)動(dòng)控制的輸出結(jié)果為
式中:κ0表示擾動(dòng)周期的抑制頻率;χ 表示功率譜初始變化率;yˉ表示旋轉(zhuǎn)機(jī)械轉(zhuǎn)子的初始存儲(chǔ)動(dòng)能。
根據(jù)式(14)的計(jì)算結(jié)果,實(shí)現(xiàn)對(duì)并網(wǎng)光伏發(fā)電機(jī)組旋轉(zhuǎn)機(jī)械的驅(qū)動(dòng)控制。
3 實(shí)驗(yàn)測(cè)試
為了驗(yàn)證所提方法是否可以實(shí)現(xiàn)理想的驅(qū)動(dòng)控制,展開實(shí)驗(yàn)測(cè)試分析。并網(wǎng)光伏發(fā)電機(jī)組中應(yīng)用的為IHFA-AF47 型號(hào)旋轉(zhuǎn)機(jī)械,電壓330 V,功率7.56 kW,氣流方向?yàn)檩S流式,旋轉(zhuǎn)直徑為756.45 mm,共有7 片葉片。利用Simulink 仿真軟件包對(duì)并網(wǎng)光伏發(fā)電機(jī)組電路進(jìn)行模擬,拓?fù)浣Y(jié)構(gòu)圖及實(shí)驗(yàn)各項(xiàng)參數(shù)設(shè)置如圖2、表1 所示。
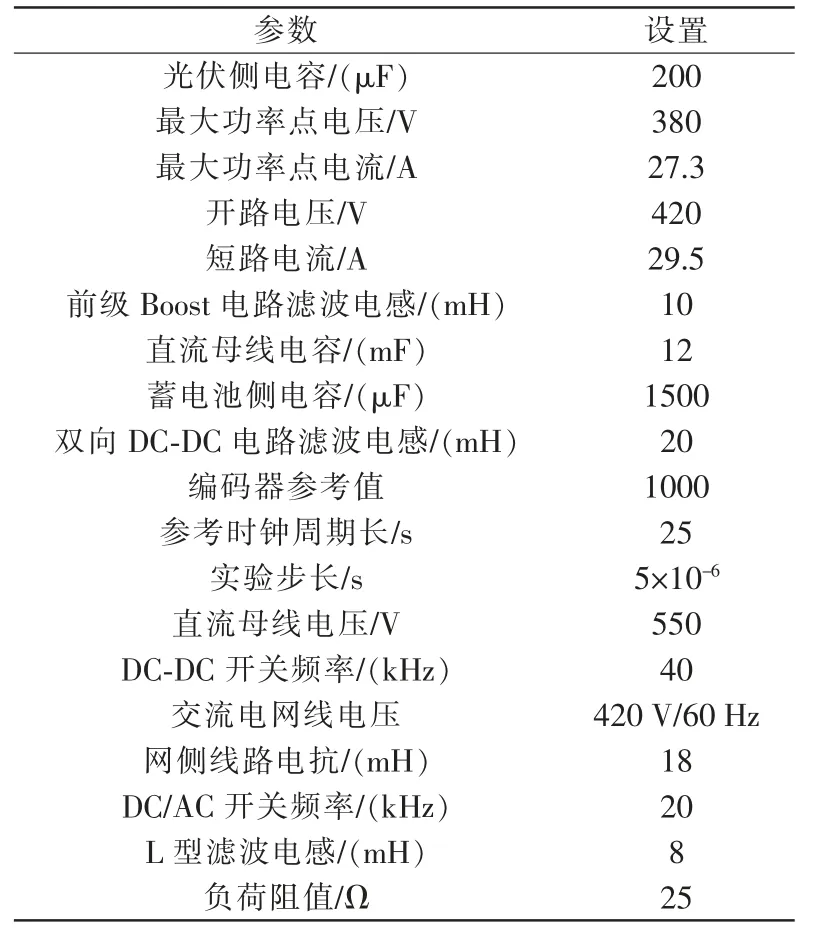
表1 實(shí)驗(yàn)參數(shù)設(shè)置Tab.1 Experimental parameter settings
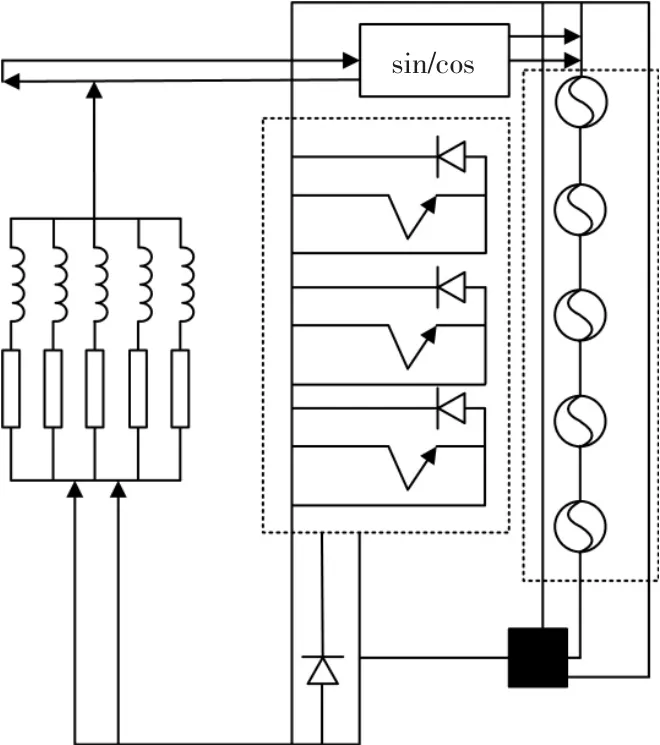
圖2 并網(wǎng)光伏發(fā)電機(jī)組模擬電路拓?fù)浣Y(jié)構(gòu)圖Fig.2 Topological structure diagram of the analog circuit of grid connected photovoltaic generating units
3.1 機(jī)械振幅測(cè)試
控制算法的電壓值決定了機(jī)械振幅的表現(xiàn)形式,振幅越大,說明控制算法的可靠性越差;反之,則說明控制算法的可靠性越高。所提方法的機(jī)械振幅如圖3 所示。
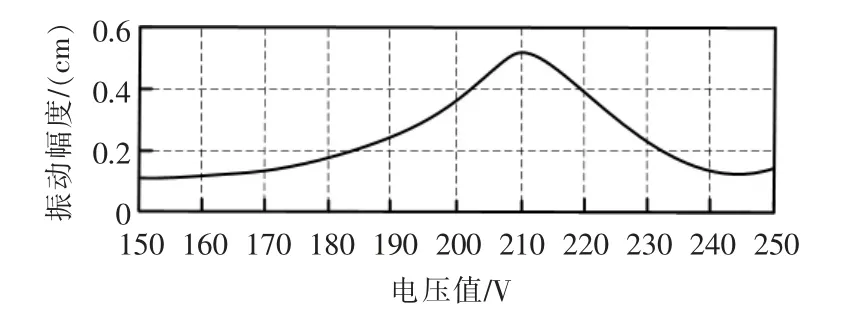
圖3 機(jī)械振幅測(cè)試Fig.3 Mechanical amplitude test
通過圖3 可知,隨著電壓值的不斷升高,機(jī)械振幅也隨之增加,直至電壓值達(dá)到210 V 時(shí)為振幅峰值,之后隨著電壓值的增加振幅出現(xiàn)下降趨勢(shì),振動(dòng)幅度始終未超過0.6 cm,說明了該方法的可靠性。
3.2 控制響應(yīng)時(shí)間測(cè)試
在控制請(qǐng)求數(shù)量不斷變化的前提下,測(cè)試所提方法的控制響應(yīng)時(shí)間。在發(fā)送控制請(qǐng)求的那一刻為起始時(shí)間,旋轉(zhuǎn)機(jī)械驅(qū)動(dòng)運(yùn)行為終止時(shí)間,響應(yīng)時(shí)間如圖4 所示。
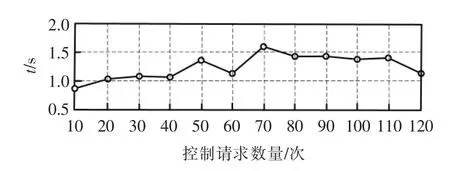
圖4 控制響應(yīng)時(shí)間測(cè)試Fig.4 Control response time test
從圖4 中可以看出,控制響應(yīng)時(shí)間較短,平均為1.28 s,數(shù)值較小,說明可以針對(duì)旋轉(zhuǎn)機(jī)械實(shí)現(xiàn)實(shí)時(shí)控制。
3.3 控制精度測(cè)試
失控率可以在一定程度上反映出算法的控制精度,計(jì)算公式為
式中:w 表示旋轉(zhuǎn)機(jī)械驅(qū)動(dòng)控制失敗次數(shù);r 表示旋轉(zhuǎn)機(jī)械驅(qū)動(dòng)控制成功次數(shù)。利用式(15)計(jì)算所提方法的失控率,結(jié)果如圖5 所示。

圖5 失控率測(cè)試Fig.5 Loss of control rate test
從圖5 中可以看出,隨著控制次數(shù)的不斷增加,所提方法的失控率雖然呈上升趨勢(shì),但未超過7.5%,說明該方法的控制精度較高,滿足設(shè)計(jì)要求。
4 結(jié)語
針對(duì)并網(wǎng)光伏發(fā)電機(jī)組中存在的問題,提出一種旋轉(zhuǎn)機(jī)械驅(qū)動(dòng)控制方法。通過分析并網(wǎng)光伏發(fā)電機(jī)組暫態(tài)響應(yīng)和計(jì)算旋轉(zhuǎn)機(jī)械動(dòng)不平衡量,建立旋轉(zhuǎn)機(jī)械驅(qū)動(dòng)控制數(shù)學(xué)模型,獲取旋轉(zhuǎn)機(jī)械的運(yùn)行狀態(tài)。建立基于VSG 的旋轉(zhuǎn)機(jī)械驅(qū)動(dòng)控制模型,將VSG 控制策略作為模型的外骨架、VSG 本體算法作為核心算法,實(shí)現(xiàn)對(duì)旋轉(zhuǎn)機(jī)械的驅(qū)動(dòng)控制。實(shí)驗(yàn)結(jié)果表明,所提方法具有較高的控制可靠性和控制效率,同時(shí)可以有效提高驅(qū)動(dòng)控制精度。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
電腦報(bào)(2020年35期)2020-09-17 13:25:53
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電腦報(bào)(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報(bào)·發(fā)現(xiàn)號(hào)趣味百科(2015年12期)2016-01-25 00:41:49
- 自動(dòng)化與儀表的其它文章
- 2024 年中國(guó)低壓變頻器行業(yè)市場(chǎng)規(guī)模及競(jìng)爭(zhēng)格局預(yù)測(cè)分析
- 我國(guó)第三代自主超導(dǎo)量子計(jì)算機(jī)上線
- 上海成為全國(guó)首個(gè)機(jī)器人密度納統(tǒng)城市
- 中控技術(shù)成功研發(fā)符合APL 標(biāo)準(zhǔn)的電涌保護(hù)器
- 5 項(xiàng)工業(yè)互聯(lián)網(wǎng)平臺(tái)國(guó)家標(biāo)準(zhǔn)正式發(fā)布實(shí)施
- 華龍訊達(dá)發(fā)布基于龍芯的全國(guó)產(chǎn)大型PLC