基于BP-AHP風(fēng)機(jī)狀態(tài)評(píng)估的超短期風(fēng)電功率動(dòng)態(tài)預(yù)測(cè)研究
2024-01-29 01:16:32楊國(guó)清王文坤王德意劉世林戚相成
大電機(jī)技術(shù) 2024年1期
關(guān)鍵詞:模型
楊國(guó)清,王文坤,王德意,劉世林,戚相成
(1.西安理工大學(xué)電氣工程學(xué)院,西安 710048;2.西安市智慧能源重點(diǎn)實(shí)驗(yàn)室(西安理工大學(xué)),西安 710048)
0 前言
隨著風(fēng)力發(fā)電技術(shù)發(fā)展以及風(fēng)電裝機(jī)容量不斷擴(kuò)大,雙饋感應(yīng)發(fā)電機(jī)被廣泛應(yīng)用在風(fēng)力發(fā)電中;截至2020年底全國(guó)風(fēng)電累計(jì)裝機(jī)2.81 億千瓦,裝機(jī)占比高達(dá)12.8%,風(fēng)電逐步由“輔助電源” 向“主力電源” 轉(zhuǎn)變[1]。然而,由于風(fēng)能本身的間歇性及不確定性使得風(fēng)機(jī)出力具有較強(qiáng)波動(dòng)性,當(dāng)大規(guī)模風(fēng)電并網(wǎng)后將會(huì)給電力系統(tǒng)運(yùn)行、調(diào)度、計(jì)劃發(fā)電等方面帶來(lái)一系列不利影響[2-3]。超短期風(fēng)電功率的準(zhǔn)確預(yù)測(cè)是解決此問(wèn)題的有效途徑[4],其在電網(wǎng)經(jīng)濟(jì)調(diào)度、運(yùn)行策略調(diào)整等方面發(fā)揮了較為關(guān)鍵的作用,同時(shí)也為電力市場(chǎng)交易提供了基礎(chǔ)信息,利于保持系統(tǒng)實(shí)時(shí)功率平衡[5],對(duì)于電網(wǎng)安全、經(jīng)濟(jì)、穩(wěn)定運(yùn)行均具有重要意義[6-7]。
近幾年,機(jī)器學(xué)習(xí)的快速發(fā)展及其在非線性系統(tǒng)控制方面的廣泛應(yīng)用為風(fēng)電功率預(yù)測(cè)問(wèn)題提供了新的解決方案[8-9]。人工智能和大數(shù)據(jù)的興起也使得國(guó)內(nèi)外大多研究學(xué)者在統(tǒng)計(jì)模型中采用人工智能算法建立風(fēng)況信息與風(fēng)電功率之間的非線性映射關(guān)系[10-12]。文獻(xiàn)[13]~[15]提出相對(duì)成熟的卷積神經(jīng)網(wǎng)絡(luò)(convolutional neural networks,CNN)和循環(huán)神經(jīng)網(wǎng)絡(luò)(recurrent neural network,RNN),前者側(cè)重于挖掘高維特征中的空間關(guān)聯(lián)性,后者則側(cè)重于挖掘序列信息的時(shí)間關(guān)聯(lián)性。在RNN 的基礎(chǔ)上還引申出了較為前沿的長(zhǎng)短期記憶(long short-term memory,LSTM)人工神經(jīng)網(wǎng)絡(luò),將此類算法用于功率預(yù)測(cè),在預(yù)測(cè)精度上相較傳統(tǒng)的人工神經(jīng)網(wǎng)絡(luò)略勝一籌。文獻(xiàn)[16]和[17]提出一種基于集合經(jīng)驗(yàn)?zāi)B(tài)分解和最小二乘支持向量機(jī)的組合預(yù)測(cè)模型,所采用的集合經(jīng)驗(yàn)?zāi)B(tài)分解方法能夠有效解決波形混疊現(xiàn)象。
目前風(fēng)電功率的預(yù)測(cè)普遍采用僅考慮外部氣象因素的靜態(tài)預(yù)測(cè)方法,即多以數(shù)值天氣預(yù)報(bào)(numerical weather prediction,NWP)數(shù)據(jù)作為模型輸入[18],利用各類機(jī)器學(xué)習(xí)算法的非線性擬合能力實(shí)現(xiàn)風(fēng)電功率的精準(zhǔn)預(yù)測(cè)。然而由于風(fēng)電場(chǎng)地理位置、地形及風(fēng)機(jī)排布方式導(dǎo)致風(fēng)機(jī)捕獲的風(fēng)能與NWP 數(shù)據(jù)之間存在一定的偏差,以及NWP 氣象數(shù)據(jù)本身所存在的誤差在一定程度上制約了風(fēng)電功率預(yù)測(cè)精度。風(fēng)速是影響風(fēng)電功率大小最主要的因素[19],故推算風(fēng)電機(jī)組所捕獲的真實(shí)風(fēng)能即風(fēng)機(jī)狀態(tài)是消除上述制約最有效的方法之一。但由于風(fēng)機(jī)所處環(huán)境以及自身結(jié)構(gòu)復(fù)雜,使得風(fēng)機(jī)狀態(tài)難以量化,對(duì)于風(fēng)電功率的動(dòng)態(tài)預(yù)測(cè)研究少之又少。如何高效精準(zhǔn)地評(píng)估風(fēng)機(jī)狀態(tài)并將其應(yīng)用到預(yù)測(cè)模型中成了一個(gè)需迫切解決的問(wèn)題。文獻(xiàn)[20]基于機(jī)器學(xué)習(xí)算法提出了一種數(shù)據(jù)驅(qū)動(dòng)的預(yù)測(cè)框架,模型以渦輪機(jī)控制輸入、流入風(fēng)速和方向作為預(yù)測(cè)變量來(lái)預(yù)測(cè)風(fēng)電場(chǎng)的功率輸出和結(jié)構(gòu)疲勞,有效提高了預(yù)測(cè)精度。文獻(xiàn)[21]中分別采用AHP 和隨機(jī)矩陣?yán)碚?random matrix theory,RMT)評(píng)估風(fēng)機(jī)狀態(tài),提出一種計(jì)及風(fēng)電場(chǎng)狀態(tài)的動(dòng)態(tài)功率預(yù)測(cè)模型;預(yù)測(cè)精度較不計(jì)風(fēng)電場(chǎng)狀態(tài)的模型有一定的提升,但仍存在以下問(wèn)題:由于AHP 包含較多的人為主觀因素導(dǎo)致評(píng)估模型的不合理[22-23],故其評(píng)估結(jié)果不能很好地追蹤風(fēng)機(jī)出力變化趨勢(shì);而隨機(jī)矩陣?yán)碚摯嬖谶m用性不確定、評(píng)估判據(jù)指標(biāo)只有平均譜半徑(mean spectral radius,MSR)、數(shù)據(jù)處理步驟復(fù)雜等不足[24-25],并不能普遍地應(yīng)用到各類風(fēng)電場(chǎng)。
針對(duì)目前研究現(xiàn)狀,本文綜合考慮風(fēng)電場(chǎng)地形、風(fēng)電機(jī)組排布及風(fēng)機(jī)自身性能等多種因素,通過(guò)在傳統(tǒng)AHP 評(píng)估模型中引入BP 算法構(gòu)建BP-AHP 評(píng)估模型,由于BP 算法基于數(shù)據(jù)建模,使評(píng)估模型克服了AHP 模型包含較多人為主觀因素的問(wèn)題。進(jìn)而基于BP-AHP 模型進(jìn)行評(píng)估,并將結(jié)果引入功率預(yù)測(cè),建立了計(jì)及風(fēng)機(jī)狀態(tài)的超短期風(fēng)電功率動(dòng)態(tài)預(yù)測(cè)模型,以期提高風(fēng)電場(chǎng)功率預(yù)測(cè)精度。
1 風(fēng)機(jī)狀態(tài)評(píng)估
風(fēng)力機(jī)通過(guò)葉輪捕獲風(fēng)能、輸出機(jī)械轉(zhuǎn)矩,傳動(dòng)軸及齒輪箱將風(fēng)力機(jī)的驅(qū)動(dòng)作用傳遞給發(fā)電機(jī)提升轉(zhuǎn)速[26]。因此,影響風(fēng)電機(jī)組出力的因素主要有外部因素和內(nèi)部因素兩種:外部因素是指風(fēng)速、風(fēng)向等氣象因素;內(nèi)部因素是指風(fēng)機(jī)狀態(tài)即風(fēng)機(jī)捕獲風(fēng)能以及將風(fēng)能轉(zhuǎn)化為電能的能力。因此在風(fēng)速等氣象因素引起風(fēng)電功率波動(dòng)的同時(shí)會(huì)導(dǎo)致風(fēng)機(jī)狀態(tài)發(fā)生不同變化,風(fēng)機(jī)狀態(tài)的改變將會(huì)使風(fēng)電功率波動(dòng)更加復(fù)雜。不同風(fēng)機(jī)功率與風(fēng)電場(chǎng)風(fēng)速之間的關(guān)系如圖1所示。
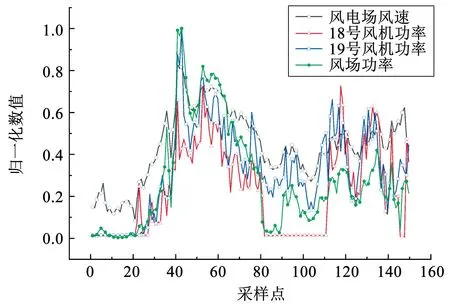
圖1 風(fēng)機(jī)出力對(duì)比圖
由圖1 可知,在采樣點(diǎn)80~110 之間,當(dāng)風(fēng)速處于中等偏上時(shí),18 號(hào)和19 號(hào)風(fēng)機(jī)出現(xiàn)了不同的行為特征。19 號(hào)風(fēng)機(jī)正常發(fā)電的同時(shí)18 號(hào)風(fēng)機(jī)處于停機(jī)狀態(tài),此時(shí)風(fēng)電場(chǎng)出力也發(fā)生了劇烈波動(dòng)。說(shuō)明各風(fēng)機(jī)將風(fēng)能轉(zhuǎn)換為電能的能力即風(fēng)機(jī)狀態(tài)是不同的,并且是隨時(shí)變化的。由此推斷,風(fēng)機(jī)狀態(tài)在一定程度上影響風(fēng)電場(chǎng)整體出力,能否準(zhǔn)確評(píng)估風(fēng)機(jī)狀態(tài)將直接影響風(fēng)電功率預(yù)測(cè)的精度。
1.1 評(píng)估指標(biāo)
風(fēng)機(jī)在運(yùn)行過(guò)程中產(chǎn)生的數(shù)據(jù)種類多,數(shù)據(jù)量大。從風(fēng)機(jī)數(shù)據(jù)采集與監(jiān)控(supervisory control and data acquisition,SCADA)系統(tǒng)導(dǎo)出的數(shù)據(jù)通常包括溫度數(shù)據(jù)、風(fēng)況數(shù)據(jù)、電網(wǎng)數(shù)據(jù)以及與偏航有關(guān)的數(shù)據(jù)等[27]。如何從眾多的運(yùn)行參量中選出能夠表征風(fēng)機(jī)運(yùn)行狀態(tài)的有效參量是至關(guān)重要的。下面從風(fēng)機(jī)運(yùn)行的實(shí)測(cè)數(shù)據(jù)出發(fā)分析各運(yùn)行參量與風(fēng)機(jī)出力之間的關(guān)系。
圖2 反映了兩臺(tái)同型號(hào)風(fēng)機(jī)的齒輪箱油溫與發(fā)電機(jī)軸承溫度的變化趨勢(shì)。結(jié)合圖1 可知,在采樣點(diǎn)40~80 和采樣點(diǎn)120~140 之間,兩風(fēng)機(jī)功率波動(dòng)處于正常變化范圍內(nèi),其齒輪箱油溫以及發(fā)電機(jī)軸承溫度的隨機(jī)波動(dòng)是平穩(wěn)的。在采樣點(diǎn)80~110 之間,當(dāng)兩風(fēng)機(jī)功率發(fā)生不同幅度的變化時(shí),兩風(fēng)機(jī)齒輪箱溫度和電機(jī)軸承溫度的平穩(wěn)波動(dòng)過(guò)程隨之被打破,其中18 號(hào)風(fēng)機(jī)各溫度參數(shù)大幅下降,溫度曲線呈鋸齒狀;19 號(hào)風(fēng)機(jī)各溫度參數(shù)也發(fā)生了一定程度的波動(dòng),但其波動(dòng)幅度相對(duì)較小。
通過(guò)圖1 和圖2 的對(duì)比分析可知,在一般情況下這些溫度參量保持在均值附近波動(dòng),這種隨機(jī)波動(dòng)是平穩(wěn)的。若某一參量或者多個(gè)參量發(fā)生異常波動(dòng),則有理由懷疑風(fēng)機(jī)系統(tǒng)狀態(tài)發(fā)生變化。
綜合對(duì)實(shí)測(cè)數(shù)據(jù)的分析結(jié)果可知,風(fēng)機(jī)狀態(tài)可由齒輪箱油溫、偏航系統(tǒng)參數(shù)及軸承溫度等多種運(yùn)行參數(shù)表征;同時(shí)風(fēng)機(jī)運(yùn)行時(shí)其性能還受風(fēng)電場(chǎng)風(fēng)況以及電網(wǎng)側(cè)因素的影響。因此,本文采用風(fēng)機(jī)運(yùn)行時(shí)SCADA 系統(tǒng)記錄的各參數(shù)實(shí)測(cè)數(shù)據(jù)作為評(píng)估風(fēng)機(jī)狀態(tài)的數(shù)據(jù)源。
1.2 AHP
AHP 是一種定性與定量分析相結(jié)合的多準(zhǔn)則決策方法,同時(shí)也是多目標(biāo)、多判據(jù)系統(tǒng)綜合評(píng)價(jià)方法。它將評(píng)估的目標(biāo)、考慮的因素及各子因素按照它們之間的相互關(guān)系分為最高層、中間層和最低層,并將因素按不同層次凝聚組合,構(gòu)建遞階層次結(jié)構(gòu)模型如圖3所示。
該模型進(jìn)行系統(tǒng)綜合評(píng)價(jià)時(shí)所要求解的是最底層各因素對(duì)于最高層目標(biāo)的貢獻(xiàn)權(quán)重,具體求解步驟如下:
步驟1:針對(duì)最底層及中間層諸多因素分別構(gòu)建判斷矩陣(以最底層為例),判斷矩陣W中的元素wij表示i因素對(duì)于j因素的重要程度,其取值依照九分位比例尺表。
步驟2:判斷矩陣一致性檢驗(yàn)。
由于根據(jù)量表給出的判斷結(jié)果具有主觀性和模糊性,使得判斷結(jié)果不可靠,因此需要根據(jù)式(2)計(jì)算一致性比例CR,當(dāng)CR<0.1 時(shí),認(rèn)為矩陣A具有滿意的一致性,否則需要重新修正判斷矩陣。
式中,CI為一致性指標(biāo);n為矩陣階數(shù);λmax為判斷矩陣的最大特征值;RI表示平均隨機(jī)一致性指標(biāo),本文RI的取值通過(guò)表1 給出。

表1 隨機(jī)一致性指標(biāo)表
步驟3:調(diào)整判斷矩陣。
若判斷矩陣通過(guò)步驟2 的一致性檢驗(yàn),則通過(guò)判斷矩陣求出的權(quán)重向量作為最底層各因素的相對(duì)權(quán)重。否則需對(duì)判斷矩陣進(jìn)行調(diào)整,直至滿足一致性檢驗(yàn)。
步驟4:計(jì)算貢獻(xiàn)權(quán)重。
確定各層中每個(gè)因素之間的相對(duì)權(quán)重后,按照遞階層次結(jié)構(gòu)對(duì)各層權(quán)重進(jìn)行遞階相乘得到最終的貢獻(xiàn)權(quán)重。
綜上可知,采用AHP 確定最底層對(duì)于最高層貢獻(xiàn)權(quán)重,在構(gòu)建判斷矩陣時(shí)難免會(huì)存在以下問(wèn)題:一方面若狀態(tài)參量數(shù)目較多,在選取和計(jì)算時(shí)將面臨較為復(fù)雜的問(wèn)題;另一方面若對(duì)各狀態(tài)參量不甚了解,每個(gè)指標(biāo)的確定不可避免的帶有人為主觀因素,不能客觀的反映出每個(gè)指標(biāo)對(duì)總目標(biāo)的貢獻(xiàn)大小。
1.3 構(gòu)建BP-AHP 評(píng)估模型
針對(duì)上述AHP 評(píng)估方法存在的問(wèn)題,為更加客觀、合理的確定每個(gè)指標(biāo)對(duì)總目標(biāo)的貢獻(xiàn),本文在AHP 的多層次結(jié)構(gòu)模型中引入BP 算法,并結(jié)合1.1節(jié)所確定的各項(xiàng)評(píng)估指標(biāo)構(gòu)建如圖4所示的BP-AHP評(píng)估模型。

圖4 BP-AHP 評(píng)估模型
BP-AHP 模型采用完全獨(dú)立結(jié)構(gòu)(即上層每一因素都有獨(dú)立的下層要素)并以風(fēng)機(jī)狀態(tài)為評(píng)估目標(biāo)。由于風(fēng)電機(jī)組是工作在戶外的旋轉(zhuǎn)機(jī)械,并與區(qū)域電網(wǎng)關(guān)聯(lián),需考慮除風(fēng)機(jī)運(yùn)行參量以外的其他影響因素,因此選取風(fēng)機(jī)性能與外界因素兩大主因素以及它們對(duì)應(yīng)的各子因素共同作為中間層指標(biāo)。最底層指標(biāo)則是中間層各指標(biāo)所對(duì)應(yīng)的具體參數(shù),包含SCADA系統(tǒng)中記錄的16 種參數(shù)。
BP-AHP 模型仍以最底層各因素對(duì)于最高層目標(biāo)的貢獻(xiàn)權(quán)重為求解目標(biāo)。由于BP 算法是通過(guò)構(gòu)建輸入層與輸出層之間的非線性映射關(guān)系,利用信號(hào)的前向傳播和誤差的反向傳遞確定各輸入變量的權(quán)重,其具有以下兩方面的優(yōu)勢(shì):(1)相較于AHP 算法通過(guò)構(gòu)建判斷矩陣確定各因素的相對(duì)權(quán)重而言,BP 完全依托數(shù)據(jù)構(gòu)建各輸入與輸出之間的映射關(guān)系,所確定的相對(duì)權(quán)重中不包含人為主觀因素;(2)引入BP 算法能夠?qū)崿F(xiàn)對(duì)每臺(tái)風(fēng)機(jī)單獨(dú)訓(xùn)練進(jìn)而確定風(fēng)機(jī)參數(shù)所對(duì)應(yīng)的權(quán)重,相較于AHP 算法只能利用一臺(tái)風(fēng)機(jī)參數(shù)所對(duì)應(yīng)的權(quán)重代替所有風(fēng)電機(jī)組而言,引入BP 算法更能保證風(fēng)電場(chǎng)各風(fēng)電機(jī)組的獨(dú)立性。利用AHP 和BP 分別對(duì)模型中間層、最底層所對(duì)應(yīng)各因素的權(quán)重進(jìn)行計(jì)算,進(jìn)而求解最終貢獻(xiàn)權(quán)重,計(jì)算步驟如下:
(1)依據(jù)1.2 中AHP 原理,計(jì)算中間各層相對(duì)權(quán)重向量,計(jì)算如下:
其中,wA為中間第一層風(fēng)機(jī)性能與外界因素兩個(gè)指標(biāo)構(gòu)成的判斷矩陣;wB、wC為中間第二層所包含指標(biāo)所構(gòu)成的判斷矩陣。
由于wA、wB只包含兩個(gè)因素,故不存在一致性問(wèn)題,無(wú)需檢驗(yàn)。根據(jù)AwmC=λwmC,求得λmax=3.99,CI=0,選取RI=0.9,即可得CR= -0.0001<0.1;則wC滿足條件。綜上可知,wA、wB、wC矩陣均通過(guò)一致性檢驗(yàn),故wm1、wm2、wm3向量均可作為對(duì)應(yīng)層的相對(duì)權(quán)重。
(2)針對(duì)于遞階層次模型最低層對(duì)于中間層的相對(duì)權(quán)重,采用BP 算法建立最低層各因素與總目標(biāo)之間的映射關(guān)系,通過(guò)數(shù)據(jù)訓(xùn)練模型從而獲取各因素相對(duì)權(quán)重。由于總目標(biāo)風(fēng)機(jī)狀態(tài)待求,故可利用風(fēng)機(jī)狀態(tài)的相關(guān)量——功率作為目標(biāo),構(gòu)建各因素與功率之間的映射關(guān)系。BP 算法模型如式(5)所示:
該BP 模型僅含輸入層和輸出層,其中xi表示第i個(gè)輸入?yún)⒘?wi為該輸入?yún)⒘繉?duì)應(yīng)的權(quán)重;y為風(fēng)機(jī)功率;f為激活函數(shù);m代表參數(shù)個(gè)數(shù)。
利用單臺(tái)風(fēng)電機(jī)組歷史實(shí)測(cè)數(shù)據(jù)訓(xùn)練BP 神經(jīng)網(wǎng)絡(luò)模型,并以均方根誤差(root mean square error,RMSE)為評(píng)價(jià)指標(biāo)。按RMSE 值較小為優(yōu)的原則確定最優(yōu)模型,并從中獲取各參量對(duì)應(yīng)的權(quán)重。由于各參數(shù)與功率的相關(guān)性存在正負(fù)相關(guān)性之分,因此對(duì)權(quán)重進(jìn)行歸一化處理時(shí)依照式(6)保留權(quán)重的正負(fù)號(hào),進(jìn)而得到單臺(tái)風(fēng)機(jī)各運(yùn)行參數(shù)相對(duì)的權(quán)重向量,作為BP-AHP 模型中最底層各指標(biāo)相對(duì)權(quán)重。
(3)依照式(7)及BP-AHP 評(píng)估模型架構(gòu)將BP 客觀權(quán)重與AHP 主觀權(quán)重遞階相乘得BP-AHP 模型中最底層各指標(biāo)對(duì)于最高層目標(biāo)的貢獻(xiàn)權(quán)重wf。
最后,基于上述所確定的貢獻(xiàn)權(quán)重,將風(fēng)電機(jī)組各參數(shù)的實(shí)測(cè)數(shù)據(jù)與相對(duì)應(yīng)的貢獻(xiàn)權(quán)重相乘即實(shí)現(xiàn)單臺(tái)風(fēng)電機(jī)組的狀態(tài)評(píng)估,如式(8)所示:
式中,xnT為風(fēng)機(jī)在T時(shí)刻的第n個(gè)運(yùn)行參量;T為時(shí)間點(diǎn);n為參量個(gè)數(shù);v為風(fēng)機(jī)狀態(tài)。
2 功率預(yù)測(cè)模型
本文采用比較成熟的梯度提升算法XGBoost 構(gòu)建輸入輸出的非線性映射關(guān)系如式(9)所示,并且在訓(xùn)練模型時(shí)使用網(wǎng)格搜索算法(Grid Search)確定模型的最優(yōu)參數(shù),以此建立效果較優(yōu)的風(fēng)電場(chǎng)超短期功率預(yù)測(cè)模型來(lái)驗(yàn)證本文所提方法的有效性。
XGBoost 模型是一種基于Boosting 的改進(jìn)集成樹(shù)模型[28],目標(biāo)函數(shù)如式(10)所示。

該算法通過(guò)貪心策略和最優(yōu)化思想集合若干弱分類器,在生成新樹(shù)的同時(shí)擬合前棵樹(shù)的殘差,使模型損失函數(shù)下降,隨著迭代次數(shù)的不斷增加,預(yù)測(cè)精度顯著提高。XGBoost 算法原理如圖5所示。

圖5 XGBoost 算法原理圖
為提升風(fēng)電功率預(yù)測(cè)的精準(zhǔn)度,根據(jù)本文所提BP-AHP 評(píng)估模型所評(píng)估出的風(fēng)機(jī)狀態(tài)構(gòu)建一種動(dòng)態(tài)的預(yù)測(cè)模型,該模型在原有靜態(tài)模型的基礎(chǔ)上引入風(fēng)機(jī)狀態(tài)這一輸入變量,能準(zhǔn)確的反映風(fēng)電機(jī)組出力狀態(tài)。由于風(fēng)機(jī)為轉(zhuǎn)動(dòng)機(jī)械,因此可假設(shè)風(fēng)電場(chǎng)狀態(tài)在一定時(shí)間范圍內(nèi)具有持續(xù)性,即風(fēng)電場(chǎng)狀態(tài)具有短時(shí)不變性,故模型以當(dāng)前t時(shí)刻的風(fēng)電場(chǎng)狀態(tài)、功率以及t+1 時(shí)刻的風(fēng)況數(shù)據(jù)為輸入預(yù)測(cè)t+1 時(shí)刻的功率。動(dòng)態(tài)預(yù)測(cè)模型如式(11)所示。
式中,nwp(t+1)、p(t+1)分別為t+1 時(shí)刻天氣預(yù)報(bào)信息和風(fēng)電場(chǎng)的預(yù)測(cè)功率;fDT表示輸入輸出的非線性關(guān)系;p(t)為t時(shí)刻風(fēng)電場(chǎng)的功率;v(t)為當(dāng)前t時(shí)刻風(fēng)電場(chǎng)狀態(tài)。
3 算例分析
本文采用西北某風(fēng)電場(chǎng)數(shù)據(jù)進(jìn)行算例分析,該風(fēng)場(chǎng)裝機(jī)容量49.5MW,單臺(tái)風(fēng)機(jī)額定容量1.5MW,風(fēng)機(jī)數(shù)量為33 臺(tái),風(fēng)電機(jī)組排布如圖6所示。選取2020年5月1日至8月1日共12960 個(gè)采樣點(diǎn)的運(yùn)行數(shù)據(jù),時(shí)間分辨率為10min,并結(jié)合相應(yīng)氣象站所采集的氣象數(shù)據(jù)為例分析驗(yàn)證本文所建模型。

圖6 風(fēng)電機(jī)組排布圖
3.1 實(shí)驗(yàn)數(shù)據(jù)清洗及重構(gòu)
基于數(shù)據(jù)驅(qū)動(dòng)的風(fēng)電功率預(yù)測(cè)研究中,準(zhǔn)確的風(fēng)電機(jī)組運(yùn)行數(shù)據(jù)與氣象數(shù)據(jù)是進(jìn)行功率預(yù)測(cè)的前提和基礎(chǔ)。但由于風(fēng)電場(chǎng)在實(shí)際運(yùn)營(yíng)中常包含因限電、異常停機(jī)、記錄儀故障、通信設(shè)備異常等外在因素導(dǎo)致實(shí)測(cè)數(shù)據(jù)中產(chǎn)生較高比例的異常運(yùn)行數(shù)據(jù)[27],弱化了各參數(shù)間的相關(guān)性,使得模型的擬合能力變差,嚴(yán)重影響預(yù)測(cè)的精度。因此,為避免數(shù)據(jù)誤差所帶來(lái)的影響,同時(shí)滿足模型輸入要求,有必要對(duì)實(shí)驗(yàn)數(shù)據(jù)進(jìn)行清洗、重構(gòu),以此提高風(fēng)電功率預(yù)測(cè)模型的準(zhǔn)確性與適應(yīng)性。本文采用統(tǒng)計(jì)學(xué)中的3-sigma 原則檢測(cè)異常數(shù)據(jù),如式(12)所示。識(shí)別異常數(shù)據(jù)后依照如圖7所示的數(shù)據(jù)重構(gòu)原理流程對(duì)原始數(shù)據(jù)進(jìn)行重構(gòu)得到訓(xùn)練數(shù)據(jù)。訓(xùn)練數(shù)據(jù)包含10716 個(gè)樣本,將其中的9000個(gè)樣本作為訓(xùn)練集,1000 個(gè)作為驗(yàn)證,剩余部分用于預(yù)測(cè)。
3.2 風(fēng)電場(chǎng)狀態(tài)
由于氣候、地形及機(jī)組排布等因素綜合作用,各參數(shù)表征各機(jī)組狀態(tài)的程度不同,同一種參數(shù)對(duì)不同的機(jī)組影響程度可能存在較大差異。若單純地以單一某臺(tái)風(fēng)電機(jī)組的貢獻(xiàn)權(quán)重代表風(fēng)電場(chǎng)所有機(jī)組參數(shù)權(quán)重水平,將難以保證各風(fēng)機(jī)的獨(dú)立性,不能反映各風(fēng)機(jī)真實(shí)出力狀態(tài)。因此,針對(duì)風(fēng)電場(chǎng)所有風(fēng)電機(jī)組均采用BP-AHP 評(píng)估模型,計(jì)算得到33 臺(tái)風(fēng)機(jī)的貢獻(xiàn)權(quán)重見(jiàn)表2(表中A,B,…,P字母代表BP-AHP 模型最底層所對(duì)應(yīng)的16 個(gè)參數(shù))。進(jìn)而可得各風(fēng)機(jī)狀態(tài),最后以33 臺(tái)風(fēng)電機(jī)組狀態(tài)取均值作為風(fēng)電場(chǎng)狀態(tài),風(fēng)電場(chǎng)狀態(tài)評(píng)估具體流程如圖8所示。
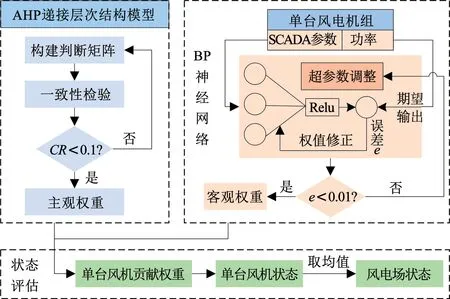
圖8 風(fēng)電場(chǎng)狀態(tài)評(píng)估流程
基于BP-AHP 所評(píng)估的風(fēng)電場(chǎng)狀態(tài)與風(fēng)電場(chǎng)功率之間的關(guān)系如圖9所示。

圖9 風(fēng)電場(chǎng)狀態(tài)與功率對(duì)比圖
不難看出,兩曲線整體變化趨勢(shì)相似,結(jié)合圖1分析可知在第80 個(gè)采樣點(diǎn)處,風(fēng)場(chǎng)部分風(fēng)電機(jī)組由于接收風(fēng)速大于切出風(fēng)速出現(xiàn)自動(dòng)停機(jī),這一過(guò)程導(dǎo)致風(fēng)電場(chǎng)狀態(tài)急劇下降,風(fēng)電場(chǎng)功率隨之呈現(xiàn)下降趨勢(shì)。為驗(yàn)證風(fēng)電場(chǎng)功率與狀態(tài)之間的相關(guān)性,引入Pearson 相關(guān)系數(shù)衡量二者之間的線性關(guān)系,相關(guān)系數(shù)rxy的取值范圍為-1~1,當(dāng)rxy取值的絕對(duì)值越大表征相關(guān)程度越高。根據(jù)式(13)計(jì)算得到風(fēng)電場(chǎng)功率與狀態(tài)的相關(guān)系數(shù)rxy=0.789,屬于強(qiáng)相關(guān)。由此可認(rèn)為利用BP-AHP 模型評(píng)估的風(fēng)電場(chǎng)狀態(tài)能夠較好地反映風(fēng)電場(chǎng)真實(shí)出力狀態(tài),可以將評(píng)估結(jié)果引入風(fēng)機(jī)功率預(yù)測(cè)模型中。
3.3 功率預(yù)測(cè)結(jié)果分析
根據(jù)是否考慮風(fēng)電場(chǎng)狀態(tài)這一因素以及評(píng)估風(fēng)機(jī)狀態(tài)的方法,將預(yù)測(cè)模型分為不計(jì)風(fēng)電場(chǎng)狀態(tài)的XGBoost模型和計(jì)及風(fēng)電場(chǎng)狀態(tài)的BP-AHP-XGBoost 模型與AHP-XGBoost 模型。訓(xùn)練模型時(shí)損失函數(shù)隨迭代次數(shù)下降的趨勢(shì)圖如圖10所示。從圖中可以看出,基于BP-AHP-XGBoost 的功率預(yù)測(cè)模型在一定程度上能夠有效避免模型訓(xùn)練時(shí)出現(xiàn)過(guò)擬合,即可認(rèn)為風(fēng)電場(chǎng)狀態(tài)這一變量是有助于提升風(fēng)電功率預(yù)測(cè)模型的精度。
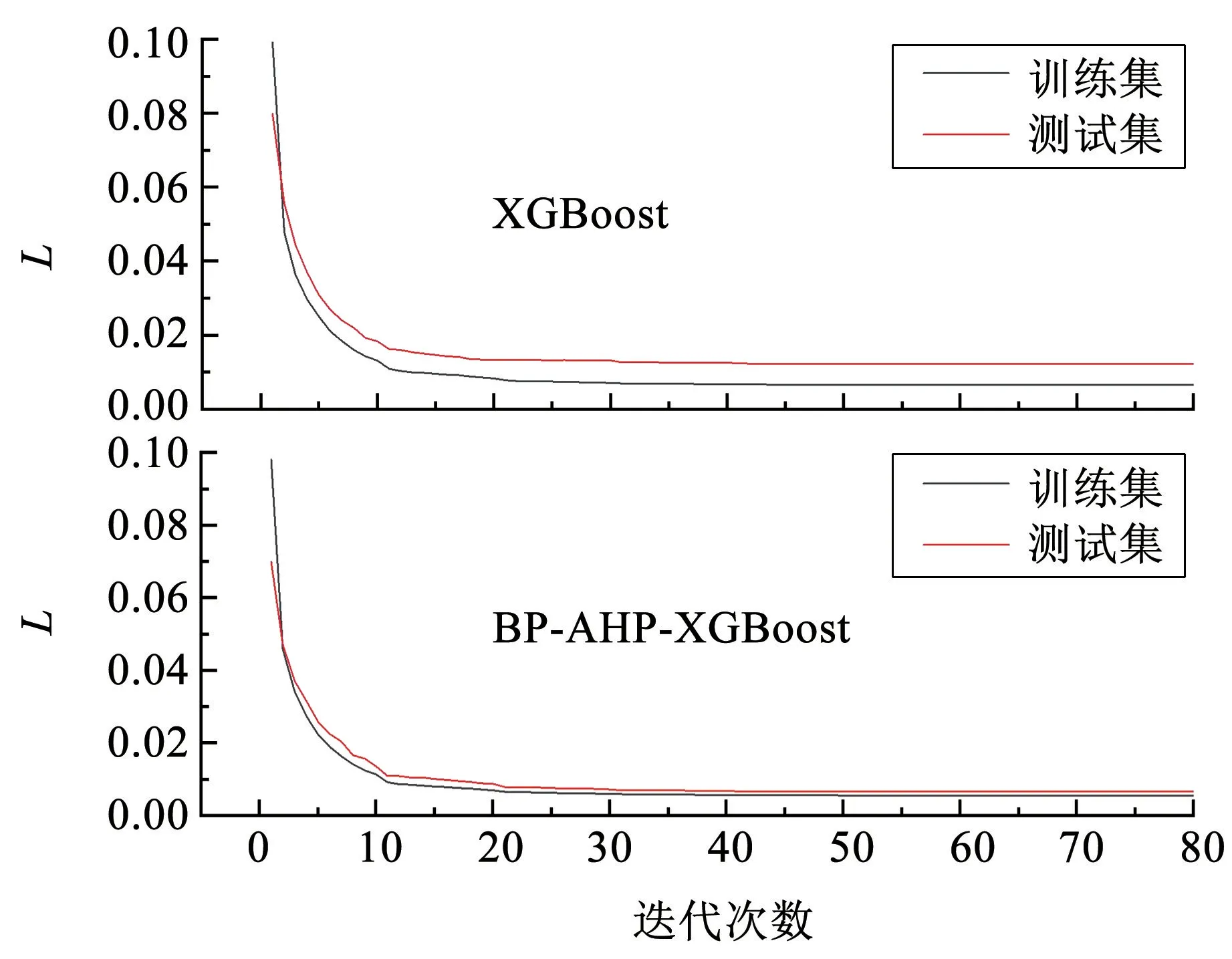
圖10 模型損失函數(shù)變化趨勢(shì)圖
為了進(jìn)一步驗(yàn)證本文所提方法在預(yù)測(cè)精度上的優(yōu)越性,分別對(duì)BP-AHP-XGBoost 模型、XGBoost 模型、AHP-XGBoost 模型進(jìn)行風(fēng)電功率超短期預(yù)測(cè),預(yù)測(cè)結(jié)果如圖11所示。從圖中不難看出,計(jì)及風(fēng)電場(chǎng)狀態(tài)的BP-AHP-XGBoost 模型預(yù)測(cè)精度明顯高于其他兩種模型。

圖11 風(fēng)電場(chǎng)功率預(yù)測(cè)結(jié)果
上述3 種預(yù)測(cè)模型在功率上升、功率下降和功率波動(dòng)不同出力場(chǎng)景下的預(yù)測(cè)結(jié)果如圖12所示,不計(jì)風(fēng)電場(chǎng)狀態(tài)的XGBoost 模型在任一場(chǎng)景都存在明顯的預(yù)測(cè)偏差;在功率上升階段,BP-AHP-XGBoost 與AHP-XGBoost 模型整體上相差不大,僅在個(gè)別點(diǎn)存在偏差;在功率下降階段及功率波動(dòng)階段,計(jì)及狀態(tài)的BP-AHP-XGBoost 預(yù)測(cè)模型仍保持較小的預(yù)測(cè)偏差,但AHP-XGBoost 模型的預(yù)測(cè)性能卻明顯低于在功率上升階段的預(yù)測(cè)性能。這也從側(cè)面印證了本文所提方法的有效性,BP-AHP-XGBoost 預(yù)測(cè)模型面臨風(fēng)電場(chǎng)狀態(tài)各種變化時(shí)總能保持較高的預(yù)測(cè)精度,將誤差控制在合理范圍之內(nèi)。
為更直觀地比較三種模型的預(yù)測(cè)效果,選用平均絕對(duì)誤差(mean absolute error,MAE)、均方根誤差(root mean square error,RMSE)[29]及確定系數(shù)(Rsquared,R2)用以評(píng)估各預(yù)測(cè)模型,R2值越接近1 則模型預(yù)測(cè)性能越好[30]。各指標(biāo)定義如式(14)~(16)所示。

各種預(yù)測(cè)模型的預(yù)測(cè)誤差見(jiàn)表3,在計(jì)及風(fēng)電場(chǎng)狀態(tài)的情況下,BP-AHP-XGB 模型相較于AHP-XGB模型在MAE、RMSE 指標(biāo)上分別降低了0.7615MW、0.5609MW;在R2模型擬合度方面提升了3.43%;表明利用BP-AHP 模型評(píng)估的風(fēng)電場(chǎng)狀態(tài)與風(fēng)電場(chǎng)真實(shí)出力狀態(tài)最接近。BP-AHP-XGB 模型相較于不計(jì)狀態(tài)的XGB 模型在預(yù)測(cè)精度上也有較大幅度的提升。
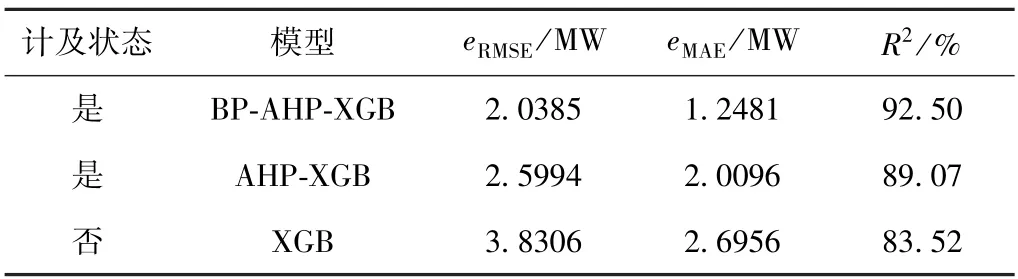
表3 預(yù)測(cè)結(jié)果誤差分析
綜上所述,風(fēng)電場(chǎng)出力受風(fēng)機(jī)狀態(tài)的影響較大,而且不同評(píng)估方法所對(duì)應(yīng)預(yù)測(cè)模型的結(jié)果不同,表明計(jì)及風(fēng)機(jī)狀態(tài)的預(yù)測(cè)模型精準(zhǔn)度在一定程度上也依賴于風(fēng)機(jī)狀態(tài)的精準(zhǔn)評(píng)估,也從側(cè)面印證了BP-AHP 評(píng)估模型的有效性。結(jié)合圖1、9、11 分析可知,當(dāng)風(fēng)況不穩(wěn)定導(dǎo)致各風(fēng)機(jī)狀態(tài)出現(xiàn)不同變化時(shí),BP-AHP評(píng)估模型的預(yù)測(cè)精度明顯優(yōu)于不計(jì)及狀態(tài)的預(yù)測(cè)模型。這說(shuō)明在任何風(fēng)況下本文所提預(yù)測(cè)模型均能保持較高的精準(zhǔn)度,具有較強(qiáng)的魯棒性,能有效提高風(fēng)電功率整體的預(yù)測(cè)精度。
4 結(jié)論
本文針對(duì)僅考慮氣象因素的傳統(tǒng)預(yù)測(cè)模型精度不足的問(wèn)題,提出一種基于BP-AHP-XGBoost 的動(dòng)態(tài)預(yù)測(cè)模型,通過(guò)算例分析驗(yàn)證了該動(dòng)態(tài)模型的可行性與優(yōu)越性,得出以下結(jié)論:
(1)融合了BP 算法特點(diǎn)和AHP 結(jié)構(gòu)模型的BPAHP 評(píng)估模型能更準(zhǔn)確地評(píng)估單臺(tái)風(fēng)電機(jī)組狀態(tài),相較于單獨(dú)的AHP 模型可以更好地反映風(fēng)電場(chǎng)真實(shí)出力狀態(tài)。
(2)針對(duì)于傳統(tǒng)靜態(tài)預(yù)測(cè)模型不考慮風(fēng)機(jī)狀態(tài)導(dǎo)致預(yù)測(cè)精度不足的問(wèn)題,將BP-AHP 模型的評(píng)估結(jié)果應(yīng)用到功率預(yù)測(cè)模型中構(gòu)建一種BP-AHP-XGBoost 動(dòng)態(tài)預(yù)測(cè)模型,該模型適應(yīng)性較強(qiáng)能夠在較復(fù)雜風(fēng)況下保持較高的預(yù)測(cè)精度;相較于傳統(tǒng)靜態(tài)預(yù)測(cè)模型在MAE、RMSE 誤差指標(biāo)上分別降低了1.4497MW、1.7921MW,使風(fēng)電場(chǎng)整體預(yù)測(cè)的精度提高8.98%,在風(fēng)電功率超短期預(yù)測(cè)方面有較高的應(yīng)用價(jià)值。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19