煤礦皮帶運輸機智能控制系統(tǒng)設(shè)計
2024-01-29 10:00:32彭佳斌
西部探礦工程 2024年1期
彭佳斌
(晉能控股煤業(yè)集團挖金灣煤業(yè)有限公司,山西 大同 037000)
就皮帶運輸機而言,就是一種不間斷運輸?shù)臋C械設(shè)備,該設(shè)備主要用傳送帶來進行部件的承載與牽拉,因為該設(shè)備有平穩(wěn)的對物體進行傳送、比較簡單的結(jié)構(gòu)、比較低的費用、運輸比較方便等優(yōu)勢,所以可以在煤礦井下與露天輸送輸料等場合內(nèi)進行使用。固有煤礦的皮帶運輸機在對監(jiān)控工作進行開展時會使用人工巡查、繼電接觸控制系統(tǒng)等方法,這樣就會使系統(tǒng)存在安全隱患比較大、較差的實時性、較低的工作效率。在煤礦的皮帶機監(jiān)控系統(tǒng)內(nèi)使用著PLC 技術(shù),這樣可以使監(jiān)控工作更加高效,可以把皮帶機正常運行時發(fā)生的一些問題馬上發(fā)現(xiàn)出來,這樣就會防止擴大事故,與此同時,還可以把勞動風(fēng)險與強度降低,還可以使皮帶運輸機在非停時的時間下降,進而確保所開展的煤炭運輸?shù)男矢遊1]。
1 礦用皮帶運輸機系統(tǒng)
就晉能控股煤業(yè)集團某礦的四級皮帶運輸系統(tǒng)而言,所設(shè)計的順序是運行控制的啟停、每級的皮帶對故障的保護控制、發(fā)生故障時報警等,檢測儀表可以實時監(jiān)測皮帶運輸機正常運行時的狀況、故障信息及系統(tǒng)參數(shù)等。在有異常或故障出現(xiàn)在某級的皮帶時,那么PLC控制器就會把判斷做出來,就會停機和聲光報警來保護皮帶運輸機,使礦用的皮帶運輸系統(tǒng)監(jiān)控更加自動化。
1.1 礦用皮帶運輸機中存在的皮帶故障與檢測故障的方法
當(dāng)煤礦的皮帶運輸系統(tǒng)正常工作時有一些因素會導(dǎo)致設(shè)備有故障發(fā)生,即為皮帶故障,在對故障種類進行檢測時,要使用的傳感器要具有針對性,這樣就可以馬上對系統(tǒng)進行保護,還把故障給排除掉了,進而使煤礦井下的作業(yè)更加高效和安全。
1.1.1 皮帶產(chǎn)生跑偏故障的原因與檢測方法
在皮帶運輸機正常工作期間,當(dāng)皮帶軸向中的縱向軸線從運輸機的核心線中偏離出來,那么就會有皮帶跑偏故障出現(xiàn)。在檢測此故障時,可以使用礦用的本安型跑偏傳感器,且型號是GEJ40,基于跑偏傳感器中的輕、重跑偏信號,讓PLC來實施停車與報警處理。
1.1.2 皮帶產(chǎn)生撕裂故障的原因與檢測方法
就皮帶運輸機系統(tǒng)與皮帶設(shè)備而言,對二者有不小損壞的是皮帶撕裂故障,其后果有可能導(dǎo)致人員傷亡。在檢測該故障時,可以使用撕裂傳感器,且型號是GVY10,并且PLC 會按照撕裂傳感器相應(yīng)的開關(guān)觸點所做出的動作狀況來把控制保護這一信號給發(fā)出來,這樣就會把皮帶運輸機所存在的電源切斷,停止運行系統(tǒng),避免擴大事故。
1.1.3 皮帶產(chǎn)生打滑故障的原因及檢測方法
就運輸機的滾筒而言,皮帶打滑會升高其外表的溫度,進而使皮帶有火發(fā)生,乃至出現(xiàn)一些嚴重性更大的事故。在檢測其從動輪的速度時可以使用速度傳感器,且是智能型的,型號是GSC200,在有低電平從該傳感器所具有的輸出端中輸出時,其電源就會被PLC 所切斷,并且是自動的,這樣低速保護就實現(xiàn)了[2]。
1.1.4 皮帶產(chǎn)生堆煤故障的原因及檢測方法
就皮帶堆煤這一現(xiàn)象而言,該現(xiàn)象將增加其驅(qū)動電機的負載,進而導(dǎo)致空轉(zhuǎn)出現(xiàn)在其傳動滾筒中,就會發(fā)生皮帶跑偏、打滑等故障,就會使其系統(tǒng)所具有的穩(wěn)定性降低,導(dǎo)致斷帶、燒毀驅(qū)動電機、停運皮帶等后果。在檢測該故障的時,可以使用堆煤傳感器,且型號是GUJ30,若有堆煤出現(xiàn)在系統(tǒng)中,就會使堆煤傳感器內(nèi)的開關(guān)觸點有動作做出,就會把故障信號傳出來,那么PLC就會馬上把停機保護這一操作做出來。
1.2 控制礦用皮帶運輸系統(tǒng)的要求
在本文中,主要對四級皮帶運輸機進行了研究,該皮帶輸運機是可伸縮的帶式輸送機,且是DSJ 系列中的,圖1 就是四級皮帶運輸系統(tǒng)示意圖,PD-4、PD-3、PD-2、PD-1 是皮帶的編號,隔爆型三相異步電動機會對皮帶進行驅(qū)動,分別用M4、M3、M2、M1 表示,且是YBK2系列的,一級皮帶對應(yīng)的隔爆型三相異步電動機的數(shù)量1臺。

圖1 四級皮帶運輸系統(tǒng)示意圖
由于要確保四級皮帶運輸系統(tǒng)運行的更加可靠與安全,還要使監(jiān)控功能更加智能得以實現(xiàn),在對系統(tǒng)進行設(shè)計時,一定要對下面幾項要求進行滿足:
(1)在初始狀態(tài)時:全部的裝置都是停止的。
(2)在啟動操作時:當(dāng)接通啟動按鈕之后,每一級的皮帶驅(qū)動電機要根據(jù)M1到M4這一順序來把逆序的啟動完成,而相鄰級之間的啟動時間要有5s的間隔,避免有故障出現(xiàn)在皮帶時,有堆料出現(xiàn)在上一級皮帶中。
(3)在實施停止操作時:當(dāng)接通停止按鈕之后,每一級皮帶驅(qū)動電機要根據(jù)M1到M4這一順序來把順序的停止完成,而相鄰級之間的停車時間要有10s 的間隔,避免每級皮帶在停運之后,沒有馬上把物料拉出來。
(4)在實施安全操作時:如果其中一級的皮帶中有異常或故障發(fā)生時,那么該級還有上面的所有級的皮帶的運行都會被停止,于此同時,還有聲光報警給發(fā)出來;還要輔助緊急操作,別的級的皮帶的運行會在10s會后進行順序停止。
2 設(shè)計礦用皮帶運輸機控制系統(tǒng)的硬件
在晉能控股煤業(yè)集團某礦皮帶運輸系統(tǒng)而言,其四級皮帶正常運行的驅(qū)動是由礦用隔爆型三相異步電動機的M4、M3、M2、M1 來實現(xiàn)的,且數(shù)量是4 臺,屬于YBK2系列。對其控制要求進行分析,并把控制系統(tǒng)需要的數(shù)字量輸出入點與其輸出點進行計算,所對應(yīng)的數(shù)量是13 個、26 個,以系統(tǒng)需要的輸出點與輸入點數(shù)還有擴展裕量的預(yù)留為基礎(chǔ)來選擇可編程控制器CPU的型號。由于對系統(tǒng)需要的容量等一些方面的原因進行了全面的考慮,在選擇PLC的型號時,選擇了CPU226,該CPU226屬于57-200系列、是德國西門子公司的,還把數(shù)字量輸入模塊配給了PLC,型號是EM221 DI8-DC24V,數(shù)量是1塊[3]。
以其控制要求為基礎(chǔ)來對輸出輸入元件進行選擇,還配置了PLC 的輸出點與輸入點,并把其I/O 分配表給列出來了,表1就是其分配表。

表1 控制系統(tǒng)輸入/輸出分配表
按照四級皮帶運輸系統(tǒng)具體的工作步驟與表1 的分配表,來對控制系統(tǒng)PLC 硬件接線圖進行設(shè)計,圖2就是其接線圖。

圖2 控制系統(tǒng)PLC硬件接線圖
3 設(shè)計礦用皮帶運輸機的控制系統(tǒng)程序流程圖
按照礦用四級皮帶運輸機正常運行的所有控制要求,把其系統(tǒng)程序流程圖給設(shè)計出來[4],圖3就是其詳細的系統(tǒng)程序流程圖。
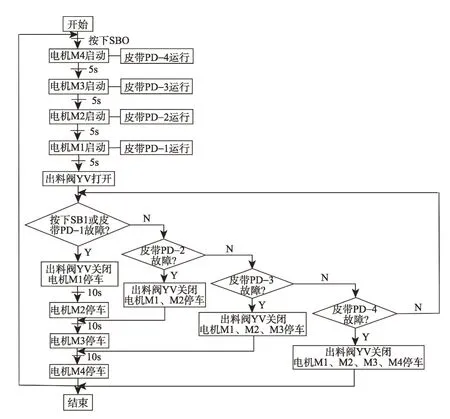
圖3 系統(tǒng)程序流程圖
4 結(jié)束語
在本文中,主要對設(shè)計故障報警控制、每級皮帶中的故障種類的檢測、控制四級皮帶運輸系統(tǒng)正常運行順序給完成了。在把可編程控制器使用到礦用皮帶運輸機系統(tǒng)中并控制之后,就可以實時監(jiān)測皮帶運輸機正常運行的狀況,對排除故障有很大幫助,使皮帶運輸系統(tǒng)更加可靠,把存在于其監(jiān)控系統(tǒng)內(nèi)的不足給解決掉,這樣就可以把生產(chǎn)效率提高,還可以保障煤礦工人的安全。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12