基于車載以太網(wǎng)的HIL 實時仿真測試平臺的研究及應(yīng)用
2024-02-01 17:23:18張文平李小燕
汽車電器 2024年1期
任 勇,張文平,王 濤,李小燕
(1.福田戴姆勒汽車有限公司,北京 懷柔 101400;2.北京石墨烯研究院,北京 海淀 100094)
由于汽車智能化、網(wǎng)聯(lián)化的進一步發(fā)展,汽車車載網(wǎng)絡(luò)容量需求已極大超過了CAN或FlexFile等傳統(tǒng)汽車車載網(wǎng)絡(luò)的能力范圍,從而擁有更高傳輸速率的汽車以太網(wǎng)技術(shù)應(yīng)運而生。汽車車載以太網(wǎng)是一種采用以太網(wǎng)連接車內(nèi)電子單元的全新局域網(wǎng)技術(shù),其標準[1-3]基于單對雙絞線以太網(wǎng)的Broad R-Reach或OABR技術(shù),最高能夠完成1000 Mbit/s的傳輸速率,同時滿足汽車行業(yè)高可靠性、低電磁輻射、低功耗及同步實時性等性能要求。因此,汽車車載以太網(wǎng)在車輛動力、智能駕駛、娛樂等整車網(wǎng)絡(luò)領(lǐng)域的應(yīng)用不斷增加。
HIL測試系統(tǒng)實時運行整車模型,并利用接口板卡鏈接被測控制器硬件接口,模擬被測控制器的輸入信息,收集控制器的輸出和必要的輸入信息,進行控制器對實時模型的閉環(huán)控制和HIL系統(tǒng)集成測試工作,完成對功能邏輯算法的驗證與測試。目前,基于CAN/CANFD通信的HIL實時仿真測試平臺,國內(nèi)已有廣泛研究[4-7],而利用MATLAB搭建支持車載以太網(wǎng)SOME/IP通信和CAN/CANFD通信的模型,同時支持DoIP通信的HIL實時仿真測試平臺研究尚未見報道。
本文基于Dspace實時仿真平臺,搭建同時支持車載以太網(wǎng)SOME/IP通信、CAN/CANFD通信和DoIP通信的HIL實時仿真測試平臺,該平臺成功應(yīng)用于環(huán)網(wǎng)架構(gòu)域控制器的HIL工作中。
1 車載以太網(wǎng)HIL實時仿真測試平臺
車載以太網(wǎng)HIL實時仿真測試平臺如圖1所示。該平臺主要由上位機電腦、HIL仿真臺架、交換機、診斷上位機和被測控制器等組成。
車載以太網(wǎng)HIL實時仿真測試平臺搭建過程大致如下:首先,按照圖1連接HIL仿真臺架、被測控制器、交換機和上位機電腦的物理接口;其次,解析車載以太網(wǎng)SOME/IP ARXML協(xié)議,根據(jù)服務(wù)接口搭建車載以太網(wǎng)通信模塊,仿真車載以太網(wǎng)服務(wù)(Method和Event類型)信號,而后通過配置CANMM仿真CAN/CANFD信號,建立車載以太網(wǎng)信號與CAN/CANFD信號的交互;然后,根據(jù)功能規(guī)范,搭建HIL仿真模型,并將自動化環(huán)境模型加載至HIL仿真平臺,并對HIL仿真平臺進行接口配置,配置車載以太網(wǎng)信號通道、CAN/CANFD信號通道及I/O通道,編譯仿真模型,生成SDF(System Description File,系統(tǒng)描述文件),上位機通過網(wǎng)線下載到下位機Real Time中運行;最后,配置車載以太網(wǎng)交換機,使車載以太網(wǎng)診斷上位機與被測控制器建立通信,形成具備測試車載以太網(wǎng)的HIL實時仿真平臺。
1)上位機電腦。HIL仿真平臺使用的工作站為上位機電腦,上位機電腦具有以下作用:①安裝MATLAB軟件,用于模型的開發(fā)及離線仿真;②安裝ConfigurationDesk軟件,將IO硬件配置與仿真模型搭建分開,用于硬件板卡與Simulink模型之間的關(guān)聯(lián)配置;③安裝ControlDesk軟件,用于對模型進行手動控制并顯示仿真的輸出數(shù)據(jù);④安裝Wireshark軟件,用于采集和分析車載以太網(wǎng)報文。
2)HIL仿真臺架。HIL仿真臺架由下位機實時仿真系統(tǒng)和板卡箱組成。實時仿真系統(tǒng)為RTI實時機,能夠進行高可靠性強的實時檢測,響應(yīng)時間≤100μs。在實時仿真系統(tǒng)運行仿真模型來模擬車輛的運行狀態(tài),通過接收被測對象發(fā)送信號,并對被測對象接收信號進行仿真,仿真環(huán)境可與被測對象之間形成閉環(huán),進而為HIL自動化測試提供必要的基礎(chǔ)。板卡箱包括DS6101板卡(電阻輸出信號通道、模擬輸入輸出通道、PWM輸入輸出通道、數(shù)字輸入輸出通道)、DS2671板卡(CAN/CANFD的通道)、DS6333板卡(車載以太網(wǎng)的通道)和負載板卡(用于配合DS6101板卡中的“數(shù)字輸入”通道使用)。
3)診斷上位機。車載以太網(wǎng)診斷上位機為基于Python語言開發(fā)的診斷上位機,該診斷上位機通過PCAN與被測控制器連接,實現(xiàn)CAN/CANFD診斷;診斷上位機同時也可通過交換機與被測控制器相連,支持車載以太網(wǎng)DoIP診斷。
4)交換機。交換機為Technica的EES車載以太網(wǎng)交換機,支持多端口100/1000BASE-T1轉(zhuǎn)換,報文延遲為<2μs,報文可帶有時間戳40ns精度。上位機通過車載以太網(wǎng)交換機環(huán)境模型、車載以太網(wǎng)診斷上位機與控制器連接,可與各節(jié)點進行數(shù)據(jù)交互,并且可通過鏡像方式,抓取各節(jié)點之間的通信報文。
5)被測控制器。本系統(tǒng)的被測控制器為采用SOA架構(gòu)的域控制器,支持千兆以太網(wǎng)傳輸速率,支持SOME/IP通信和CAN/CANFD通信,通過DoIP進行診斷,屬于HIL仿真測試對象。
2 HIL仿真模型
基于車載以太網(wǎng)HIL仿真包括:多功能通信模塊(支持車載以太網(wǎng)SOME/IP通信和CAN/CANFD通信)、電源控制模塊、動力學(xué)模型、手動控制模塊、輸入模塊、輸出模塊,見圖2。環(huán)境模型的主要功能是提供給被測控制器工作所需的各種輸入信號(I/O硬線信號、CAN/CANFD信號、車載以太網(wǎng)SOME/IP信號),并讀取被測控制器的輸出信號,進而驗證被測控制器的各個功能。該系統(tǒng)環(huán)境模型的每一個單獨輸出信號(I/O硬線信號、CAN/CANFD信號、車載以太網(wǎng)SOME/IP信號)都有兩種數(shù)據(jù)流方式,一是通過動力學(xué)模型進行仿真,二是通過手動設(shè)置。動力學(xué)仿真模式將被測控制器的輸出信號及駕駛員輸入信號傳到模型中進行處理,形成了信號的閉環(huán);而手動設(shè)置模式則是直接對被測控制器的輸入進行設(shè)置,沒有形成信號閉環(huán)。通過仿真模型進行某一信號的改變,可以驗證該信號對于被測控制器相關(guān)聯(lián)功能以及車輛模型其他關(guān)聯(lián)參數(shù)的一系列影響,而通過手動設(shè)置模式向被測控制器輸入信號,能便捷直接地驗證被測控制器的直接關(guān)聯(lián)功能,便于測試人員驗證問題。

圖2 仿真模型模塊
2.1 電源控制模塊
電源控制模塊包括4個信號,分別是:①設(shè)備低壓程控電源開關(guān)控制信號,同時也是被測控制器低壓開關(guān)控制信號;②設(shè)備保護電流設(shè)置;③設(shè)備遠程操作允許設(shè)置,此設(shè)置允許在上位機對設(shè)備進行操作;④設(shè)備低壓電源電壓值設(shè)置。
2.2 動力學(xué)模型
動力學(xué)模型包括駕駛員模型、車輛動力學(xué)模型、OUTPORT模塊及Plantmodeloutport等4個模塊。分別為:①駕駛員模型的功能是模擬駕駛員對車輛的一些可操作設(shè)備的操作及外界環(huán)境對車輛的影響因素,作為動力學(xué)仿真模型必要的輸入;②車輛動力學(xué)模型主要由電池模塊、電機模塊、變速器模塊、車輛模塊、DCDC模塊、真空泵模塊、能耗計算模塊等子仿真模塊構(gòu)成;③OUTPORT模塊作用主要是將駕駛員模型中的輸入信號,分解或轉(zhuǎn)化成相關(guān)控制器I/O通道的開關(guān)信號或模擬信號;④Plantmodeloutport,該模塊的功能是為之前動力學(xué)模型沒有進行仿真的信號賦值,保證模型能夠產(chǎn)生被測控制器需要的所有外部信號。
2.3 手動控制模塊
手動控制模塊的功能是提供人為設(shè)置Dspace任一輸出信號的接口,包括I/O信號、CAN信號和車載以太網(wǎng)SOME/IP信號。
1)I/O信號手動控制模塊:該模塊的功能是提供Dspace設(shè)備向控制器輸出的所有I/O信號的手動設(shè)置接口。與輸入模塊相同,每一個信號通道可以單獨控制是否啟用。對于每一個信號,其名稱代表了控制器的管腳號。
2)總線信號手動控制模塊:信號設(shè)置模塊包括整車網(wǎng)絡(luò)節(jié)點的所有總線信號(CAN信號和SOME/IP信號),每一個信號都有Value和Switch兩個信號,一個用來對該總線信號進行數(shù)值設(shè)置,Switch信號用來進行手動設(shè)置值與模型仿真值的切換。信號觸發(fā)模塊的功能為向多功能通信模塊提供觸發(fā)信號,使Dspace設(shè)備按總線協(xié)議的要求發(fā)送相應(yīng)的總線信號。
2.4 輸入模塊
本模塊主要包括了被測控制器的輸出信號與HIL設(shè)備的接口模塊,功能是HIL設(shè)備接收被測控制器的輸出信號,并轉(zhuǎn)化成易讀格式。
2.5 輸出模塊
本模塊是HIL設(shè)備的輸出信號與被測控制器的接口,功能是將被測控制器工作需要的輸入信號通過HIL設(shè)備相應(yīng)的硬件接口發(fā)送給被測控制器。
2.6 多功能通信模塊
多功能通信模塊包含車載以太網(wǎng)通信模塊和CAN/CANFD通信模塊,功能是發(fā)送與接收車載以太網(wǎng)SOME/IP信號和CAN/CANFD信號。其中,車載以太網(wǎng)通信模塊具有以下技術(shù)指標:①該通信模塊支持車載以太網(wǎng)協(xié)議中的UDP和TCP兩種傳輸方式,支持TCP握手,Socket建立;②該通信模塊支持發(fā)送車載以太網(wǎng)SOME/IP和SOME/IP SD報文,并可仿真事件通告、遠程過程調(diào)用的使用場景,同時可仿真SOME/IP SD報文訂閱過程;③該通信模塊支持車載以太網(wǎng)E2E校驗及故障注入,同時支持單播、多播和廣播的網(wǎng)絡(luò)通信方式。
3 車載以太網(wǎng)HIL實時仿真測試
基于車載以太網(wǎng)HIL實時仿真測試平臺能夠?qū)崿F(xiàn)模擬駕駛測試、車載以太網(wǎng)服務(wù)訂閱、SOME/IP通信測試、車載以太網(wǎng)DoIP診斷測試和故障注入測試。
3.1 模擬駕駛測試
HIL仿真系統(tǒng)通過模擬實車運行環(huán)境,可在實車測試前進行基本功能的駕駛測試仿真測試,同時可以覆蓋實車上無法驗證的測試場景(如極限工況測試等),為被測控制器軟件功能性測試提供了極大便利。測試者可通過駕駛員仿真界面為HIL仿真系統(tǒng)輸入ON電指令、油門開度、制動、換擋位置等信號。駕駛員仿真信號經(jīng)過硬件在環(huán)仿真模擬器的處理后,將傳感器I/O信號、CAN總線信號、車載以太網(wǎng)信號等傳輸?shù)秸嚳刂破鳎嚳刂破鞯讓咏邮仗幚砗髠鬏斨琳嚳刂破鲬?yīng)用層,整車控制器應(yīng)用層軟件運算處理后發(fā)出執(zhí)行器控制信號。圖3為模擬駕駛測試界面。

圖3 模擬駕駛測試界面
如圖3所示,整車狀態(tài)為12,行車模式,READY燈點亮,擋位為D擋。同時該界面也可仿真快慢充插槍使被測控制器進入快慢充模式,亦可仿真T-BOX邏輯使被測控制器進入遠程模式。
3.2 車載以太網(wǎng)服務(wù)訂閱及SOME/IP通信測試
采用基于SOME/IP協(xié)議通信的SOA架構(gòu)的控制器根據(jù)各節(jié)點的功能需求的不同,可分為Client端(客戶端)和Server端(服務(wù)端)。Server端為服務(wù)的提供者,可通過SOME/IP的服務(wù)接口向Clien端提供服務(wù);Clien端為服務(wù)的消費者,可通過服務(wù)接口向Server端請求服務(wù)。SOME/IP通信主要功能可以劃分為服務(wù)訂閱和遠程服務(wù)調(diào)用。
本文以被測控制器上ON電功能為例,仿真節(jié)點ECU1為服務(wù)端,被測控制器ECU2為客戶端。具體上ON電流程如圖4所示,當被測控制器收到制動踏板踩下信號后,就會識別鑰匙位置是否在車內(nèi),若鑰匙有效信號為有效,則被測控制器控制IG繼電器吸合,成功上ON電。下文將依據(jù)該實例進行服務(wù)訂閱和遠程服務(wù)調(diào)用過程說明。
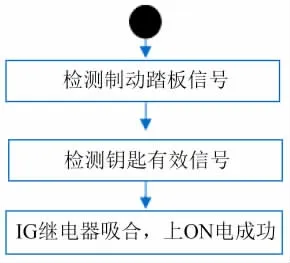
圖4 上ON電流程
3.2.1 服務(wù)訂閱
車載以太網(wǎng)的服務(wù)發(fā)現(xiàn)和訂閱是通過SOME/IP SD協(xié)議來實現(xiàn)的,固定端口號為30490,其報文使用UDP傳輸方式傳送。Client端可通過SOME/IP SD的Find Service報文發(fā)現(xiàn)服務(wù)實例,使用Subscribe報文訂閱報文或調(diào)用的服務(wù)實例;同時Server端通過SOME/IP SD的Offer報文告知其它網(wǎng)絡(luò)節(jié)點可提供的服務(wù),通過SubscribeACK/SubscribeNACK告知客戶端服務(wù)的可用性(比如服務(wù)出現(xiàn)錯誤時,則該服務(wù)不可用),見圖5。
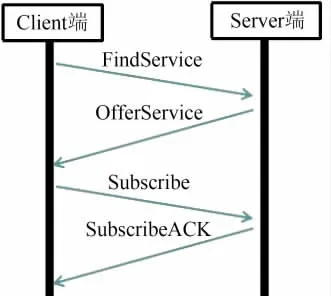
圖5 服務(wù)訂閱過程
SOME/IP SD 主要有以下優(yōu)勢:①車輛啟動時,車內(nèi)各ECU初始化時間各不相同,ECU 通過SOME/IP SD 就可以靈活發(fā)布其Service 的使用狀態(tài);②車輛變型時,可以更好適應(yīng)功能/配置的變化,同時減少前期的配置工作;③Client端的Service出現(xiàn)問題時,SOME/IP SD可快速識別Service的不可用狀態(tài),Server端就可以迅速做出響應(yīng);④降低總線負載率,功能場景需要的時候才會提供/訂閱服務(wù),可降低總線負載率,減少能量消耗。
被測控制器ECU2服務(wù)訂閱過程如下文描述。HIL系統(tǒng)啟動后,給ECU2供電。ECU2訂閱ECU1鑰匙有效服務(wù),實現(xiàn)服務(wù)的注冊,其服務(wù)發(fā)現(xiàn)和訂閱過程如圖6所示。

圖6 鑰匙有效服務(wù)訂閱過程
1)Client端以廣播形式發(fā)出發(fā)現(xiàn)服務(wù)(Type=0x00,F(xiàn)indService)報文給各節(jié)點,鑰匙有效服務(wù)Service ID為47105(源IP地址為192.168.61.7,目的IP地址為239.0.0.255)。
2)Server端收到該FindService報文后,通過單播發(fā)出提供服務(wù)(Type=0x01,OfferService)報文給Client端(源IP地址為192.168.61.4,目的IP地址為192.168.61.7)。
3)Client端收到該OfferService報文后,通過單播發(fā)出訂閱服務(wù)(Type=0x06,SubscribeEventgroup)報文給Server端(源IP地址為192.168.61.7,目的IP地址為192.168.61.4)。
4)Server端收到該SubscribeEventgroup報文后,通過單播發(fā)出服務(wù)確認(Type=0x07,SubscribeEventgroupACK)報文給Client端(源IP地址為192.168.61.4,目的IP地址為192.168.61.7),此時服務(wù)訂閱成功。
3.2.2 遠程服務(wù)調(diào)用
車載以太網(wǎng)遠程服務(wù)調(diào)用報文類型可分為Method類型和Event類型,如圖7所示。Method類型又分為Request/Response(RR)和Fire&Forget(FF)兩種通信方式。其中RR通信主要用于實現(xiàn)Clien端發(fā)送請求消息,Server端收到請求,處理后進行響應(yīng);FF是一種不需要Client端響應(yīng)報文的請求通信。Event類型的通信主要用于實現(xiàn)Client端向Server 端訂閱需要的事件組/事件,當事件被觸發(fā)時,Server端需要向Client端發(fā)送更新的內(nèi)容。

圖7 Request/Response服務(wù)和Event服務(wù)
Event類型報文發(fā)送方式可分為Cycle、On change和事件值變化超過預(yù)定范圍。圖8為鑰匙有效服務(wù)為On change觸發(fā),上文中該服務(wù)已被客戶端訂閱。當仿真節(jié)點服務(wù)端檢測到制動踏板信號值變化時,就會觸發(fā)仿真節(jié)點發(fā)出鑰匙位置有效報文(Service ID=47105,Method ID=32769),同時被測控制器ECU2檢測到仿真環(huán)境發(fā)送的制動踏板信號后,ECU2就會檢測鑰匙有效信號,當ECU2接收到鑰匙位置有效信號為有效時,IG繼電器吸合,ECU2上ON電。圖8所示整車狀態(tài)為12,整車模式為行車模式。

圖8 成功上ON電界面和鑰匙有效信號
3.3 車載以太網(wǎng)DoIP診斷測試
DoIP的主要作用是實現(xiàn)外部診斷儀與車載網(wǎng)絡(luò)節(jié)點之間的診斷連接,其通信采用TCP傳輸方式。本文利用自主開發(fā)的DoIP診斷儀用于被測控制器ECU2的下線電檢測試。
3.3.1 連接過程
診斷儀與被測控制器ECU2建立網(wǎng)絡(luò)連接過程如下文所述。首先,進行診斷儀與被測控制器的物理連接;其次,診斷儀請求被測控制器ECU2 打開 TCP_ DATA Socket,使診斷儀與被測控制器ECU2建立Socket(TCP 3次握手);隨后,診斷儀向被測控制器ECU2發(fā)送路由激活請求,被測控制器收到路由激活指令后則進行路由激活處理,建立Socket,并對診斷儀的激活請求進行響應(yīng),從而完成路由激活連接,此時成功完成DoIP的連接。當結(jié)束診斷交互后,診斷儀主動請求關(guān)閉Socket(TCP 4次揮手),從而使診斷儀與被測控制器斷開連接。DoIP連接和斷開流程如圖9所示。

圖9 DoIP連接和斷開流程
3.3.2 下線電檢診斷
1)首先,診斷儀與被測控制器ECU2進行Socket連接和路由激活(診斷儀Source Address 為0x0E80,IP 為192.168.61.71;被測控制器ECU2 Target Address=0x0100,IP為192.168.61.36),如圖10所示。

圖10 DoIP連接示意圖
2)診斷儀發(fā)送診斷報文到被測控制器ECU2,DoIP實體經(jīng)過通用DoIP首部處理及DoIP診斷處理后,向診斷儀發(fā)送確認接收的診斷響應(yīng)。如圖11所示,診斷儀發(fā)送0x10 03,DoIP實體回復(fù)0x50 03 00 32 00 c8,則被測控制器ECU2進入擴展模式。

圖11 DoIP診斷示意圖
3)當DoIP斷開連接時,首先進行TCP 4次揮手過程,而后關(guān)閉Socket接口,如圖12所示。
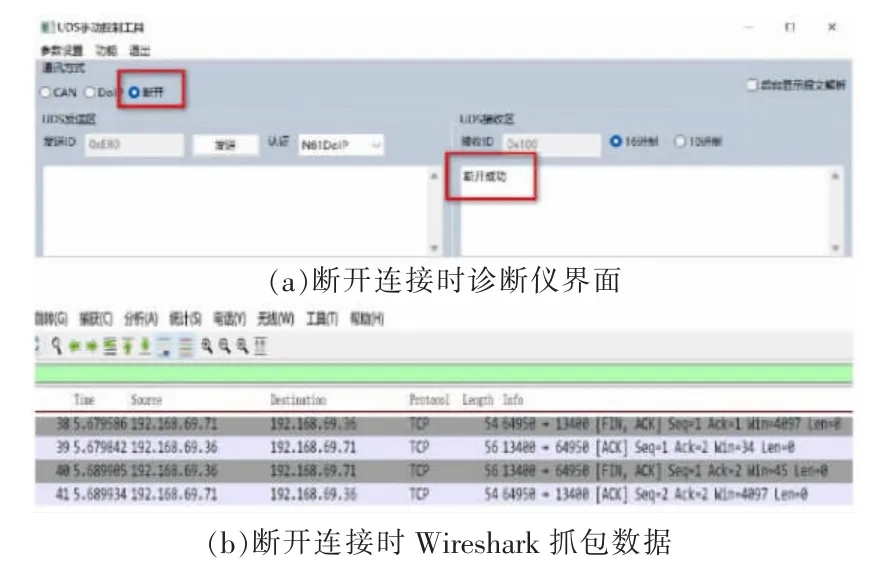
圖12 DoIP斷開示意圖
3.4 車載以太網(wǎng)E2E校驗
車載以太網(wǎng)E2E為端到端保護機制的簡稱,在整車通信系統(tǒng)中通過特定監(jiān)測機制來保證信息在節(jié)點之間傳輸過程中的數(shù)據(jù)及時性、正確性和完整性。從功能安全的角度看,如果E2E接收方必須依賴于所接收信號的及時性、正確性和完整性,那么E2E發(fā)送端和接收端之間的通信即為安全相關(guān)的。本文定義以太總線網(wǎng)絡(luò)使用Profile 4算法[5-7]。如圖13所示,E2E Profile 4算法元素包括:Length、Counter、Data ID、CRC Checksum。

圖13 E2E Header示意圖
Counter,其初始化、累加、重置以及校驗都由E2E Profile完成。對于發(fā)送端,初始化完成以后,第1次傳輸時,Counter值應(yīng)該被初始化為0x0;每次發(fā)送后,Counter值遞增0x1;當Counter值達到最大值0xFFFF后,下一次發(fā)送時,Counter值從0x0重新開始循環(huán)。Data ID,每一個被E2E保護的信號組都擁有一個特定的ID,長度為32bits。Data ID 配置為SOME/IP 的Message ID(ServiceID/MethodID)。Length用來指示車載以太網(wǎng)中報文數(shù)據(jù)的長度,長度為32bits。
CRC Checksum為循環(huán)冗余校驗。被測控制器ECU2的CRC采用32-bit 0x1F4ACFB13多項式算法,具體參數(shù)設(shè)置見表1。

表1 32-bit 0xF4ACFB13算法元素值
車載以太網(wǎng)E2E校驗測試前,需要把E2E Header的Length、Counter、Data ID和CRC Checksum算法導(dǎo)入HIL測試系統(tǒng)中。如需驗證E2E校驗的故障注入,可通過修改算法,使Length、Counter、Data ID和CRC Checksum其中之一錯誤即可。圖14為加載E2E Profile 4算法仿真擋位信號(Service ID=14,Method ID=32769)的以太網(wǎng)E2E校驗值,其中Length=0x00 1D,Counter=0x3B B3,Data ID=0x00 0E 80 01,CRC=0x4B E4 5E A6。

圖14 E2E校驗案例
4 結(jié)論
本文基于Dspace實時仿真平臺搭建具備測試車載以太網(wǎng)的HIL實時仿真測試平臺及仿真測試。結(jié)果表明:該平臺可以滿足基本功能的駕駛仿真測試,同時支持CAN/CANFD通信和SOME/IP通信測試,并可以對車載以太網(wǎng)報文進行E2E校驗;利用診斷上位機可以進行CAN/CANFD通信和DoIP通信的UDS診斷操作。綜上所述,車載以太網(wǎng)的HIL實時仿真測試平臺能夠幫助提高基于車載以太網(wǎng)通信的域控制器應(yīng)用軟件測試效率,提升軟件品質(zhì),節(jié)省開發(fā)成本,可以滿足當前對于域控制器應(yīng)用層軟件快速開發(fā)、驗證、測試的需求。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
今日農(nóng)業(yè)(2019年12期)2019-08-15 00:56:32
今日農(nóng)業(yè)(2019年10期)2019-01-04 04:28:15
今日農(nóng)業(yè)(2019年16期)2019-01-03 11:39:20
電子制作(2018年11期)2018-08-04 03:25:42
商周刊(2017年9期)2017-08-22 02:57:56