考慮綠燈末期非機動車通行安全的四相位交叉口信號配時優化
2024-02-02 15:23:44朱從坤
黑龍江交通科技 2024年1期
唐 軼,朱從坤
(蘇州科技大學,江蘇 蘇州 215011)
0 引 言
作為道路弱勢者,非機動車在道路行駛過程當中更容易受到傷害。據統計,2020年非機動車交通事故發生數為29 969起,死亡人數為4 373人[1],2021年交通事故數量上升到35 141起,其中死亡人數更是達到了4 525人[2],在這之中交叉口是事故高發地。因此如何解決交叉口非機動車通行安全問題已經成為了迫在眉睫的事情。
白輅韜等[3]提出一種基于機動車、非機動車、行人同時考慮道路、環境等方面因素的交通管理控制模型,將機非混行交叉口的通行效益最大化。邢冰等[4]考慮非機動車對機動車的阻滯性,以區域內機動車總延誤為優化目標,折減交叉口通行能力,提出相鄰交叉口的相位差優化模型。韓印等[5]優化了相鄰交叉口的相位差。以機動車的總延誤為優化指標,建立基于非機動車影響下的交通控制優化模型。李強[6]以飽和度為約束,選取機動車、非機動車、行人三者的延誤時間加上機動車停車次數、交叉口通行能力5個指標作為優化指標,確定權重系數,運用遺傳算法對多目標優化模型進行求解。
綜上,目前對非機動車信號配時優化設計的研究大多集中在混合交通流的通行效率方面,將非機動車安全因素考慮進信號配時設計卻很少涉及。因此以重點解決綠燈末期非機動車通行安全為目標,對四相位信號交叉口信號配時進行優化設計,其研究成果對交叉口非機動車的交通安全管理具有重要的價值。
1 綠燈間隔時間優化
綠燈間隔時間的定義為即將失去通行權的相位綠燈結束到得到通行權的相位綠燈開始之間的間隔。綠燈間隔時間的長短直接關系到信號交叉口的事故率。當綠燈間隔時間的長短不合理時,將會對信號交叉口的車輛通行安全造成很大的威脅。所以,在設計綠燈間隔時間時,必須將相鄰兩相位的停車線至可能發生交通沖突的點之間的行駛時間差完全考慮在內[7]。
在以往的研究中綠燈間隔時間的設計僅僅考慮了機動車的通行安全,對非機動車的通行安全涉及很少。因此為了確保本相位綠燈即將截止時通過交叉口的非機動車不會與下一相位綠燈剛啟亮時駛出的機動車發生沖突,四相位信號交叉口綠燈間隔時間的確定方法如下。
根據目前的交通規則,黃燈啟亮后,如果車輛已經越過停止線將仍然可以繼續通行。因此,沖突的相交過程應符合以下條件:
t優i=tbf+tfi-tS-thi
(1)
式中:t優i為優化后i相位綠燈間隔時間,s;tbf為交叉口正常行駛的非機動車輛的制動時間,s,一般情可取 2.0 s;tfi(ffi=Sfi/Vfi,Sfi為i相位末期非機動車輛從停車線到沖突點的距離,m,Vfi為行駛速度,m/s)為i相位末期非機動車車輛由停止線行駛至沖突點的時間,s;tS為機動車輛啟動和反應所需的時間,s,一般可取1.8~2.0 s(與車型有關,當大型車占比較大時,需要另外計算);thi為i相位的下一相位機動車車輛從停止線行駛到沖突點并且停車所用的時間,s。
這時相交車流的任意一方運行狀態將發生改變,也就是要強制減速和停車,以避免發生交通碰撞。
當交叉口行人流量較大,且沒有設置行人專用相位,但是斑馬線上設置了行人過街安全島,在這種情況下,大多數行人在綠燈末期會選擇進入交叉口,在安全島上等待下一個綠燈相位。為了避免下一個相位機動車和非機動車與行人之間的沖突,綠燈時間間隔優化為
(2)
式中:abi為i相位過街人行橫道的長度,m。vp為行人過街平均速度,m/s。
這里公式(2)有兩個假設,假設一:本相位綠燈剛結束時,行人剛好進入交叉口,此為最不利條件;假設二:行人到達人行橫道安全島后,便停止過街,等候下一個綠燈相位。
綠燈間隔時間的設計存在著一個最低值,在國外,最低值通常為4 s,而且在進行信號控制器的設計和制作時,都會用內部的電路編程來固定這一最低限值,無論在什么情況下,信號控制器都會確保兩個相位之間的綠燈間隔時間不小于4 s。
2 非機動車綠燈提前截止
當交叉口較大,或者交叉口單方向較長,按照以上優化方案可能會導致綠燈間隔時間過長,信號周期總損失時間過大,造成總周期過長,增加交叉口車輛的延誤。此時為了保障非機動車的行駛安全,可以使用非機動車綠燈提前截止的方法。交叉口非機動車綠燈提前截止計算如公式(3)所示。
Tji=tbf+tfi-tS-thi-ti
(3)
式中:Tji為i相位非機動車提前截止時間,s;ti為i相位原綠燈間隔時間,s。
綠燈提前截止雖然可以有效地減少非機動車與下一相位的機動車交叉沖突,但是由于通行時間的縮短,非機動車的通行效率并不能得到良好的保障。因此需要根據交叉口的實際條件和不同相位的實際需求選擇不同的優化方案,在同一個交叉口也以選擇將兩種方案相結合的方式可以達到一種很好的優化效果。
3 機非沖突影響下的非機動車最小綠燈時間確定
最小綠燈時間指為了保證車輛通行安全,在一個信號周期內取得通行權相位的車輛最小綠燈通行時間。為保障非機動車交叉口通行安全,非機動車通行最小綠燈時間確定如下。
3.1 左轉非機動車最小綠燈時間
當機動車與非機動車發生交通沖突時,通常都會有一方選擇避讓以避免造成交通事故。在調查研究中發現,機動車與非機動車發生交通沖突時,會出現兩種情況,機動車避讓非機動車和非機動車避讓非機動車。在某個周期時間內,將非機動車避讓次數與機非沖突總數的比值定義為非機動車避讓率,計算如公式(4)、公式(5)所示。
(4)
(5)
式中:Km為機動車避讓率;Kn為非機動車避讓率;Cmn為機動車避讓非機動車的次數;Cnm為非機動車避讓機動車的次數;C為機非沖突總次數。
建立線性回歸模型,對非機動車避讓率與機動車流量和非機動車流量之間的關系進行研究。建立非機動車避讓率與機動車流量和非機動車流量之間的關系模型如公式(6)。
Kn=a·Qm+b·Qn1+c·Qn2+d
(6)
式中:Qm為機動車流量;Qn1為自行車車流量;Qn2為電動自行車流量;a,b,c,d為模型系數。
通過現場交通調查數據,對非機動車避讓率與機動車和非機動車流量之間的關系進行線性回歸分析,得出判定系數R2為0.836,說明該線性回歸模型擬合度較好,模型的可行性良好。模型系數a,b,c,d分別為5.62×10-4、9.56×10-5、7.62×10-5、0.79。得出非機動車避讓率和機動車和非機動車流量的關系模型如公式(7)所示。
Kn=5.62×10-4·Qm+9.56×10-5·Qn1+7.62×10-5·Qn2+0.79
(7)
當機非發生交通沖突時,避讓的一方每次避讓將會造成一定的時間損失。電動自行車由于啟動速度較快每次避讓的損失時間相比于普通自行車來說較短,這里考慮最不利因素即非機動車每次避讓的損失時間按普通自行車每次避讓的損失時間取值為1~2 s,這里取平均值1.5 s。
非機動車一次左轉過街最小綠燈時間確定如公式(8)所示。
(8)
式中:gif左min為i相位左轉非機動車最小綠燈時間,s;N左為左轉非機動車與機動車沖突次數;T清為非機動車的清空時間,s,一般可取5 s;S左為非機動車左轉過街長度,m;v左為非機動車左轉過街平均速度,m/s;t優i為優化后i相位綠燈時間間隔時長,s。
這里設置的非機動車清空時間是考慮讓上一周期停車等待綠燈的非機動車全部開始通過交叉口。
3.2 直行非機動車最小綠燈時間
根據上一節提出的考慮機非沖突造成的時間損失,直行非機動車最小綠燈時間確定如公式(9)。
(9)
式中:gi直min為i相位直行非機動車最小綠燈時間,s;N直為直行非機動車與機動車沖突次數;S直為非機動車直行過街長度,m;v直為非機動車直行過街平均速度,m/s;t優i為優化后i相位綠燈時間間隔,s。
但是交叉口直行最小綠燈時間同時要滿足行人的最小過街需求。為了讓行人安全通過交叉口,需要確定行人過街所需要的最小時間。行人過街最小綠燈長[8]如公式(10)所示。
(10)
式中:gi人min為i相位行人過街最小綠燈時間,s;D為行人的滯后時間,s;lp為行人過街長度,m;vp為行人過街平均速度,m/s;t優i為優化后i相位綠燈時間間隔,s。
這里設置的行人滯后時間是考慮讓上一周期停止等待綠燈的行人全部開始通過交叉口。D的取值一般為7 s。因此最終直行非機動車最小綠燈時間取兩者的最大值如公式(11)所示。
gif直min=max{gi直min,gi人min}
(11)
式中:gif直min為最終i相位直行非機動車最小綠燈時間,s。
在實際交通信號配時當中,都要確保每個相位有不低于15 s的綠燈時間,如果時間過短會造成車輛啟動頻繁,從而增加車輛延誤,降低通行效率。
4 實例分析
為了檢驗方法在實踐中的可行性,選取蘇州市核心地帶非機動車交通流量較大的典型四相位信號交叉口桐涇北路和金門路交叉口作為案例進行實證分析。
4.1 信號配時優化
(1)流量比計算。
使用HCM2000的估算方法來計算飽和流量,以信號交叉口各車道或車道組的飽和流量為基礎,用車道或車道組的通飽和流量乘以各種影響因素的折算系數對飽和流量進行折減。
飽和流量的修正如公式(12)和公式(13)所示。
S修=SO·M·f總
(12)
式中:S修為修正后車道飽和流量;SO為車道或車道組的基本飽和流量;M為車道組的車道數;f總為綜合校正系數。
f總=fH·fG·fL·fR·fW
(13)
式中:fH為重型校正系數;fG為坡度校正系數;fL為左轉校正系數;fR為右轉校正系數;fW為車道寬度校正系數。
左轉車道、直行車道、右轉車道的基本飽和流量分別取1 800、1 800、1 550 pcu/h。其中電動自行車換算成標準自行車的換算系數取1.3[9],將非機動車流折算成機動車流,換算系數為0.24[10]。交叉口各進口道車流量和沖突數據如表1所示,流量比計算如表2所示。
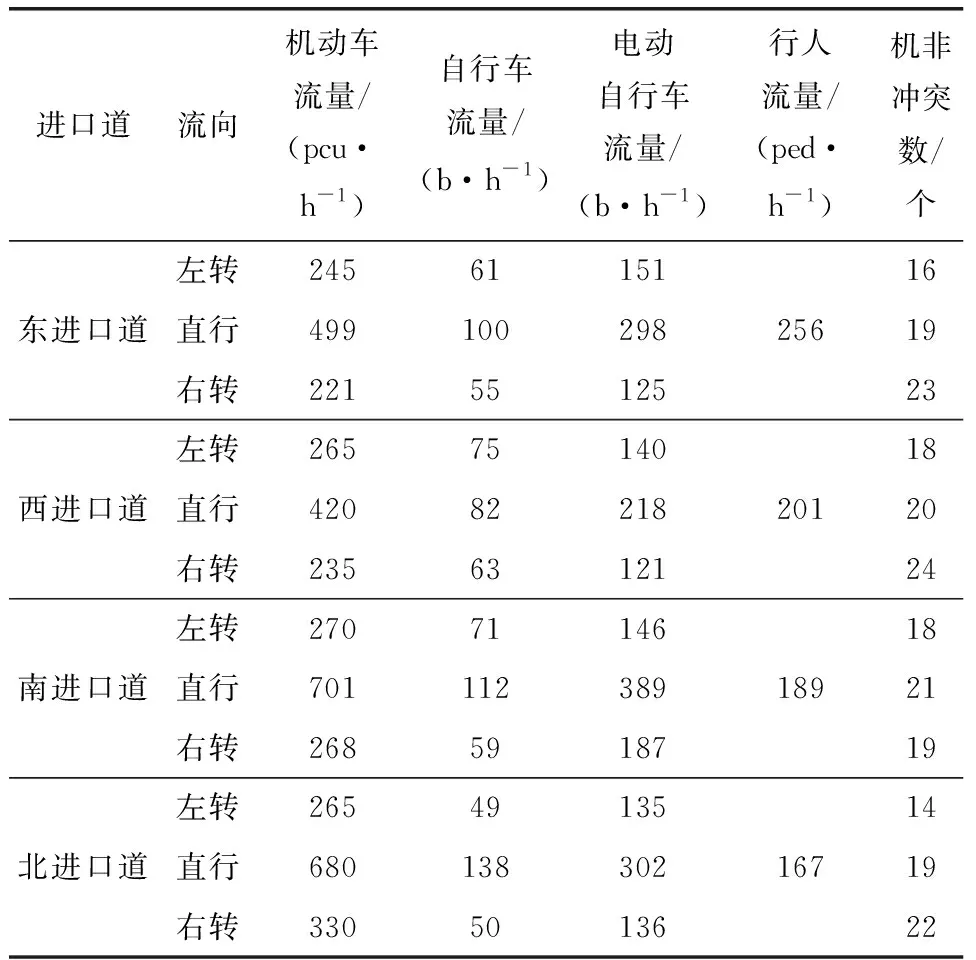
表1 交叉口各進口道高峰小時交通流量和沖突數
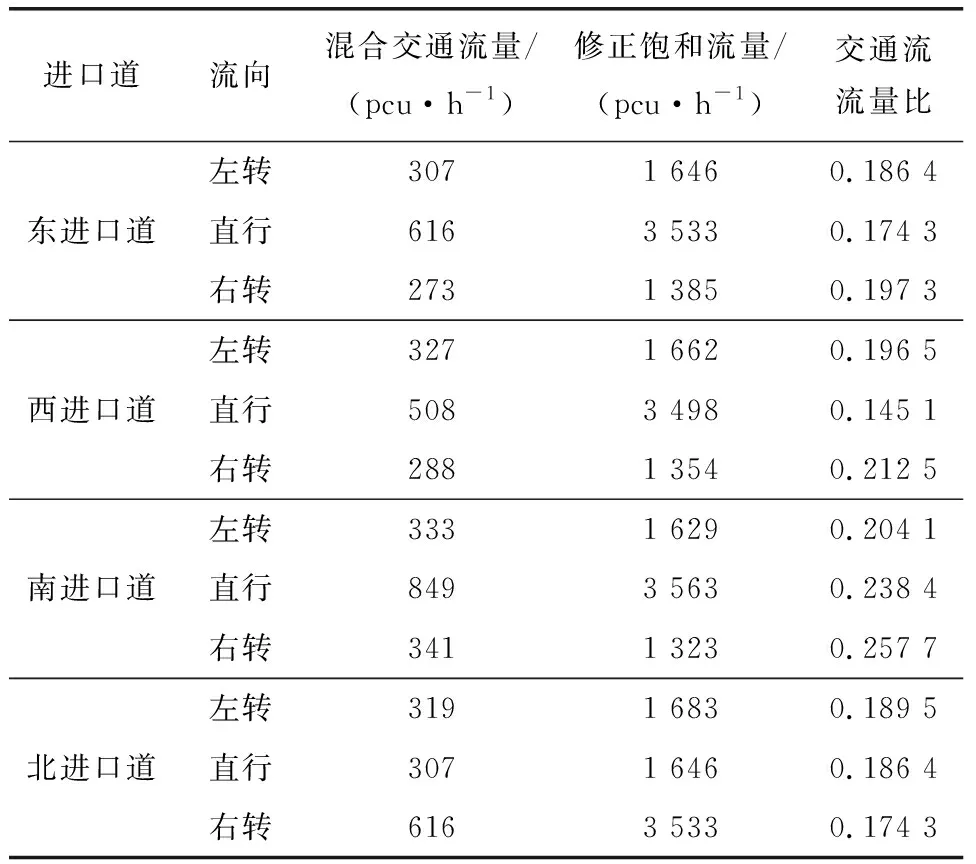
表2 交叉口各進口道高峰小時流量比統計表
則各相位的交通流流量比如下所示。
相位一(東西向直行)的流量比:y1=max(0.174 3,0.145 1)=0.174 3;
相位二(東西向左轉)的流量比:y2=max(0.186 4,0.196 5)=0.196 5;
相位三(南北向直行)的流量比:y3=max(0.238 4,0.226 3)=0.238 4;
相位四(南北向左轉)的流量比:y4=max(0.204 1,0.189 5)=0.204 1;
交叉口綜合流量比:Y=0.813 3<0.9。
(2)綠燈間隔時間的求解。
根據優化方案每一相位綠燈間隔時間計算結果如下。
由此可以看出,第二相位和第四相位需要的綠燈間隔時間較大,信號周期偏大,因此第二相位和第四相位采用非機動車綠燈提前截止的方法保證綠燈末期非機動車的通行安全。
新的每一相位的綠燈間隔時間如表3所示。
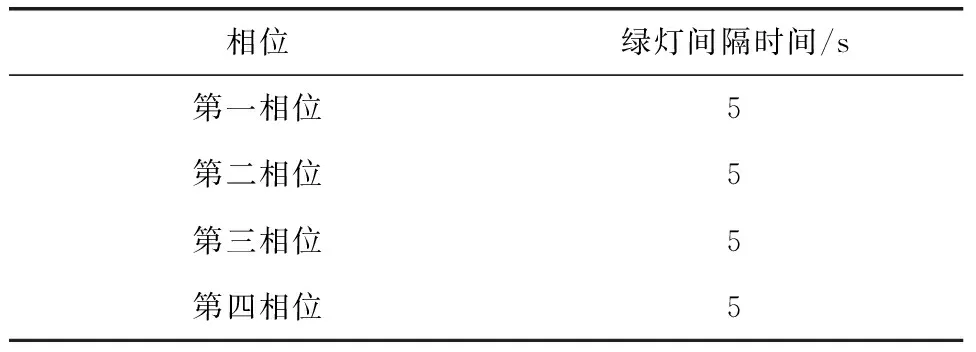
表3 考慮非機動車綠燈提前截止的不同相位綠燈間隔時間
根據非機動車綠燈提前截止優化方案,第二相位和第四相位的非機動車綠燈提前截止時間計算得:
Tj2=tbf+tf2-ts-th2-t2=9-5=4 s,
Tj4=tbf+tf4-ts-th4-t4=8-5=3 s。
周期總損失時間為
L=∑(l+ti-A)=(3+5-3)×4=20 s。
(3)最小綠燈時間。
左轉非機動車最小綠燈時間計算得:
直行最小綠燈時間計算得:
g1f直min=max{25,15}=25s,
g3f直min=max{24,14}=24 s。
所以東西向直行最小綠燈時間為25 s,南北向直行最小綠燈時間為24 s。東西向左轉最小綠燈時間為17 s,南北向左轉最小綠燈時間為19 s。
(4)最佳周期時長。
(5)有效綠燈時間。
GE=T-L=187-20=167 s。
交叉口各相位的有效綠燈時間計算得:
g2=40 s,g3=49 s,g4=42 s。
考慮到最小綠燈時間,則有效綠燈時間為:
ge1=max{g1fmin,g1}=36 s,
ge2=40 s,ge2=49 s,ge2=42 s。
每一相位的實際顯示綠燈時間為:
G1=ge1-A+l=36 s,G2=40 s,G3=49 s,
G4=42 s。
因此優化配時方案為第一相位(東西向直行)綠燈36 s,黃燈3 s,全紅時間2 s;第二相位(東西向左轉)綠燈40 s,黃燈3 s,全紅2 s,非機動車綠燈提前截止4 s;第三相位(南北向直行)綠燈49 s,黃燈3 s,全紅2 s;第四相位(南北向左轉)綠燈42 s,黃燈3 s,全紅2 s,非機動車綠燈提前截止3 s。信號周期時長為187 s。
4.2 VISSIM仿真與效果分析
當機非發生沖突時,機動車和非機動車的延誤必然增加,當延誤增加時,非機動車強行穿越機動車或機動車強行穿越非機動車的可能性都會增加,機非沖突也會有所增加,造成非機動車的行車安全性下降。可以得出機動車和非機動車的車均延誤間接反映了交叉口的機非沖突數。因此采用機動車和非機動車的車均延誤作為評價指標對優化前后非機動車的安全性進行對比分析。
通過VISSIM軟件對交叉口信號配時優化后的方案與原交叉口交通控制方案進行仿真對比分析,優化前后的機動車和非機動車平均延誤如表4、表5所示。
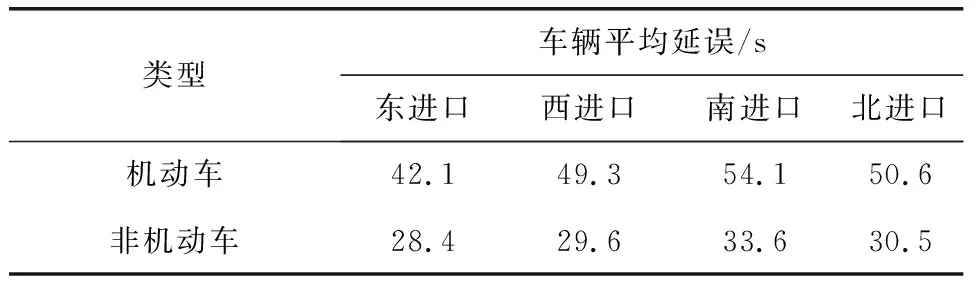
表4 信號配時優化前車輛平均延誤

表5 信號配時優化后車輛平均延誤
根據表4和5可知,其中機動車東進口道平均延誤時間降低了1.4%,西進口道降低了2.4%,南進口道降低了0.6%,北進口道降低了4.2%。非機動車東進口道降低了2.8%,西進口道降低了5.1%,南進口道降低了7.1%,北進口道降低了3.6%。可以看出機動車延誤和非機動車不同進口道均有少量降低。由于信號配時優化方案重點解決綠燈末期通行的非機動車與下一相位機動車之間的沖突,而這一部分的沖突占比較少,因此優化后延誤降低較少,符合文章優化需求,驗證了優化方案的可行性。
5 結 論
以綠燈末期非機動車的通行安全為優化目標,以改進的韋伯斯特信號配時方法為基礎,對綠燈間隔時間、非機動車最小綠燈時間、飽和流量等參數進行優化。同時構建了與綠燈間隔時間相協調的非機動車綠燈提前截止配時方案。用VISSIM仿真軟件對優化后的信號配時方案進行效果評價,結果表明,交叉口機動車平均延誤降低了2.2%,非機動車平均延誤降低了4.7%,間接表明綠燈末期機非沖突有所降低,綠燈末期的非機動車行駛安全得到良好保障。該研究成果對解決交叉口綠燈末期非機動車的通行安全具有重要意義,同時也為城市道路交叉口非機動車的交通管理與設計規劃提供理論依據。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00