氫電鋰電通勤飛機分布式推進系統匹配設計
2024-02-10 14:16:04王宇伍庭佳李湘余雄慶
中國機械工程 2024年1期
王宇 伍庭佳 李湘 余雄慶
摘要:針對通勤類飛機總體設計參數和飛行任務剖面需求,根據氫電鋰電推進系統架構方案,提出了推進系統參數匹配方法和能源動態平衡管理策略。以19座級通勤飛機作為驗證對象,對其動力裝置和儲備能源進行了選型和管理研究。根據選型的分布式推進氣動布局方案,進一步采用全析因試驗設計方法分析了螺旋槳轉向對飛機氣動特性的影響,獲得了有利于飛機巡航狀態的螺旋槳轉向配置方案。
關鍵詞:通勤類飛機;燃料電池;參數匹配方法;分布式電推進
中圖分類號:V221
DOI:10.3969/j.issn.1004132X.2024.01.002
Matching Design of Distributed Propulsion Systems for Hydrogen-Lithium
Batteries Powered Commuter Aircrafts
WANG Yu1,2 WU Tingjia1,2 LI Xiang1,2 YU Xiongqing1,2
1.College of Aerospace Engineering, Nanjing University of Aeronautics and Astronautics,
Nanjing,210016
2.Key Laboratory of Fundamental Science for National Defense-advanced Design Technology of
Flight Vehicle,Nanjing,210016
Abstract: Aiming at the overall design parameters and mission profile requirements of commuter aircrafts, according to the hydrogen-lithium propulsion system architecture scheme, the propulsion system parameter matching method and energy dynamic balance management strategy were proposed. A 19-seat commuter aircraft was used to select and manage the power plant and reserve energy. According to the selected distributed aerodynamic layout scheme, then the effects of propeller rotation directions on aircraft aerodynamic characteristics were analyzed with full factorial design of experiments, and the optimum propeller rotation direction configuration for aircraft cruise states was obtained.
Key words: commuter aircraft; fuel cell; parameter matching method; distributed electric propulsion
0 引言
新能源飛機以電能、氫能和可持續航空燃料作為推進能源,對實現航空領域的綠色環保、高效節能,完成“雙碳目標”具有重要意義。電動飛機引領航空技術創新、推動綠色航空發展,將對世界航空業產生革命性的影響[1]。目前很多國家針對通航飛機開展了氫燃料電池與鋰電池等電推進技術的研究。
氫燃料電池飛機依靠燃料電池將所儲存的氫氣及空氣中的氧氣轉化為電能提供給飛機。雖然氫燃料電池系統能量密度較高,但是功率密度較低,為滿足航空動力要求,一般要與功率密度高的鋰電池配合使用。針對氫電鋰電混合動力電推進系統在飛機上的應用,國外開展了一些理論分析研究。TRAINELLI等[2]以Tecnam P2012飛機平臺為例開展了氫燃料電池動力改型的總體性能分析,結果表明改型后有效載荷減少50%以上。PALAIA等[3]針對常規機翼機身和盒式機翼兩種布局形式的中短程飛機,研究了液氫推進系統對飛機主要性能的影響,結果表明氫動力飛機能有效提高動力系統功重比。WADDINGTON等[4]研究了液氫燃料電池電力推進系統在集成到與波音737-800性能相當的單通道飛機時對飛機產生的影響,并說明了液氫/燃料電池推進系統在商用飛機應用中的可行性。PASTRA等[5]對渦槳飛機應用氫電鋰電混合動力方案可行性進行了評估,并計算了不同混合配置下質子交換膜燃料電池和鋰電池組合動力的效率與收益。
國內主要是針對氫電鋰電飛機在總體、氣動、系統及支持設施等學科領域開展研究。黃俊[6]指出氫電鋰電飛機在提高飛機氣動效率、載運能力、環保性和魯棒性等方面是一種航空領域的顛覆性技術。在氫能飛機總體概念設計領域,荊戈[7]針對E20-FC兩座氫能飛機給出了概念設計方法,并對飛機的推進系統、總體布局進行了方案設計。李毅波等[8]對跨領域飛行器——空地兩用燃料電池輕型飛機的總體參數進行了設計、建模與分析,其方法可用于此類飛行器的快速設計與參數權衡。劉福佳等[9]提出了輕型電動飛機依據任務剖面、商載和航程估算起飛總質量的方法。而對于分布式電推進分布概念在氫能飛機上的應用,孔祥浩等[10]論證了飛機燃料電池混合動力系統及分布式電推進系統方案的可能性,并指出分布式混合電推進技術是中大型飛機電氣化的重要方向,且需要與多學科交叉融合共同發展。
目前國內外主要是以新能源小型飛機或垂直起降飛機為研究對象評估和分析氫電鋰電混合動力電推進技術對飛行性能和方案設計的影響,而針對支線客機和通勤飛機的研究,特別是考慮動力裝置架構、氣動布局和飛行平臺性能之間的耦合關系與匹配情況的研究尚處于起步階段。基于此研究背景,本文提出了19座級通勤飛機推進系統參數匹配設計方法,并對分布式氣動布局方案進行分析,選取最優氣動構型。
1 氫電鋰電混動架構方案
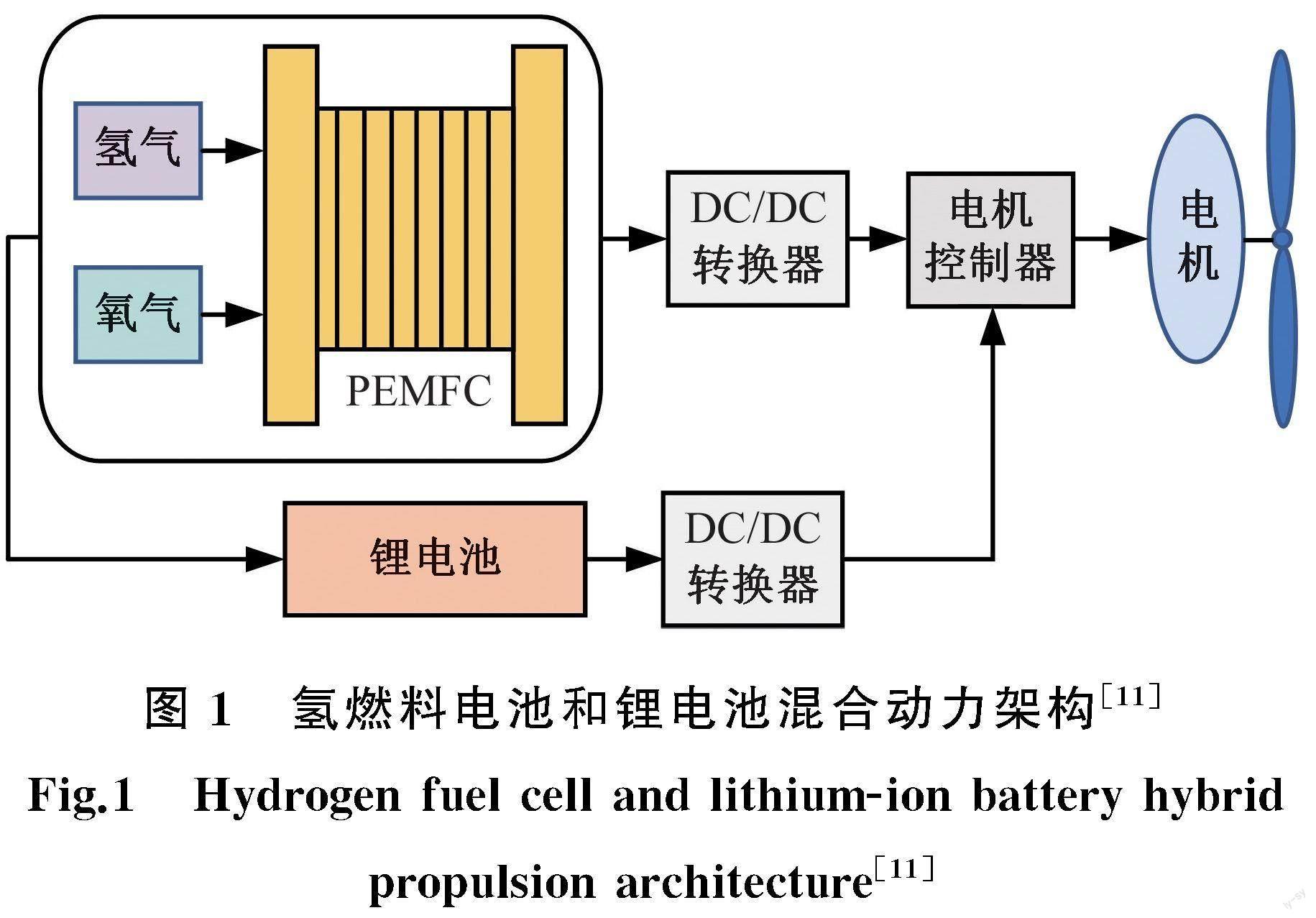
采用氫燃料電池+鋰電池混合動力方案的飛機電力系統主要包括氫燃料電池堆(PEMFC)、儲氫罐、鋰電池、DC/DC轉換器、電機控制器、電機、螺旋槳、電纜線以及能量管理系統。鋰電池和氫燃料電池通過DC/DC轉換器改變輸出的電壓,通過電機控制器調節電機轉速,驅動螺旋槳產生前進的拉力,鋰電池作為輔助電池。考慮到飛機需求功率變化范圍較大,氫燃料電池實際上只需要滿足平均功率需求即可,超出平均功率的部分由鋰電池補充,而當鋰電池電量不足時,氫燃料電池又能同時為鋰電池充電,從而提高整個能源供應系統的可靠性和穩定性。氫燃料電池和鋰電池混合動力架構方案如圖1所示[11]。
1.1 儲能電池
氫燃料電池使用質子交換膜燃料電池,具有較高的能量轉換率和較小的工作溫度限制,且工作點穩定,不受卡諾循環的限制[12],能量密度最高可達鋰電池能量密度的上百倍,這對實現航空輕量化具有重要意義,但氫燃料電池(加儲氫罐)的功率密度通常不超過750 W/kg。而鋰電池則相反,功率密度可超過2000 W/kg,而目前工業級鋰電池能量密度僅為250 W·h/kg[13],因此,氫燃料電池搭配鋰電池儲能可滿足飛機起飛爬升階段大范圍功率變化和快速響應的需求,是目前航空應用的最佳方案。
1.2 儲氫瓶
氫氣通常有三種儲存方式,高壓氣態儲氫、液態儲氫和固態儲氫。其中液態儲氫需要將氫氣冷卻至-253 ℃,同時液化需要消耗大量的能量,并且需要低溫儲存,目前尚不適合于航空運輸。固態儲氫依靠氫與稀土合金或納米材料發生化學反應或物理吸附來儲存,這類儲氫方式儲氫密度大、儲氫壓力小、安全性高,但是目前技術尚未成熟,未來具有較大發展潛力[14]。現階段的主要儲氫方式是采用高壓氣態儲氫,它具有充放氫氣速度快、容器結構簡單等優點,常用氣瓶有35 MPa和70 MPa兩種形式[15]。
1.3 電機
目前高功率電機主要有永磁同步電機(無刷直流電機)和超導電機兩種。超導電機采用超導體代替常規材料實現機械能與電能的轉換,此技術尚未成熟。目前在電動飛機上應用較多的是永磁同步電機,它具有功重比較大、效率高和可靠性高的特點,同時電機具有相對尺度無關性,可用多個小功率電機取代單個大功率電機,兩者的功率密度和質量基本保持不變,這為分布式氣動設計提供了條件,可結合推進、氣動學科得到綜合性能的收益[16]。
1.4 螺旋槳
螺旋槳作為將電機的功率轉化為飛機向前推力的重要裝置,根據槳葉角是否可調分為變距螺旋槳和定距螺旋槳。定距螺旋槳只能在部分選定速度范圍內效率最高,但構造簡單、質量輕,故被廣泛應用于輕型飛機。變距螺旋槳可通過調整槳距來滿足不同飛行任務階段需求。
2 氫電鋰電推進系統參數選型匹配
氫電鋰電推進系統匹配要求選型的新能源裝置滿足飛機重量和運載能力要求,根據適航條例和飛機總體設計參數,對飛機推進裝置進行選型匹配。
2.1 任務需求功率計算
根據飛機總體設計要求,由飛機在起飛滑跑、爬升、巡航、下降階段運動方程計算飛機各任務階段需求功率。其中起飛滑跑過程可近似看作飛機勻加速運動,爬升和下降階段可視為飛機以定常上升或下滑,巡航階段可視為飛機處于平衡狀態,即升力與重力、阻力與推力相平衡。
起飛滑跑階段功率由文獻[9]進行估算:
式中,a為起飛滑跑階段的加速度;sTOR為起飛滑跑距離;PLOF為起飛滑跑階段消耗的平均功率;vld為飛機離地速度;f為地面摩擦因數;ρ為空氣密度;S為機翼面積;vcl為爬升階段平均速度;WTO為飛機起飛質量;g為重力加速度;Cx_TO為起飛滑跑階段飛機阻力系數;Cy_TO為起飛滑跑階段飛機升力系數。
爬升階段功率可根據定常爬升計算:
式中,Pcl為爬升階段所消耗的平均功率;α為爬升角;Lcl為爬升階段飛機升阻比。
巡航階段功率可根據飛機平衡狀態計算:
式中,PVC為飛機巡航時所需功率;vC為飛機巡航速度;LVC為巡航階段飛機升阻比。
飛機在各飛行階段所需的功率由氫燃料電池和鋰電池共同提供。
2.2 電機參數選擇
電機功率指標有持續功率和峰值功率兩種。持續功率也稱為額定功率,是指電機穩定工作能持續輸出的功率,它隨著螺旋槳的轉速變化而變化,而峰值功率是指在特定轉速下電機所能達到的最大功率[17]。選型電機應根據飛行任務剖面功率需求而定。在起飛滑跑階段,電機需要短時間提供較大的功率,此功率應小于電機總的峰值功率。而巡航階段占總飛行時長較長,電機應該以持續功率長時間工作,任務所需功率應接近電機最大持續功率,即
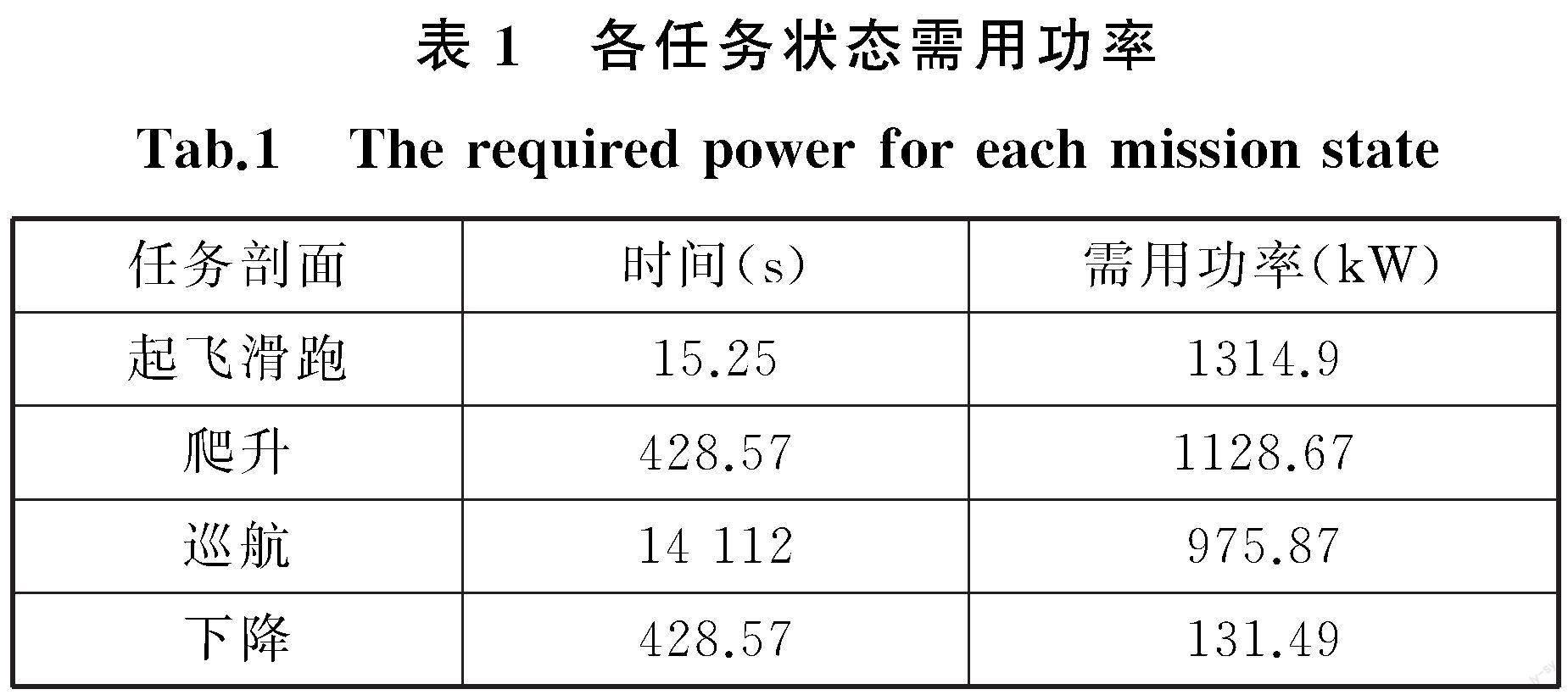
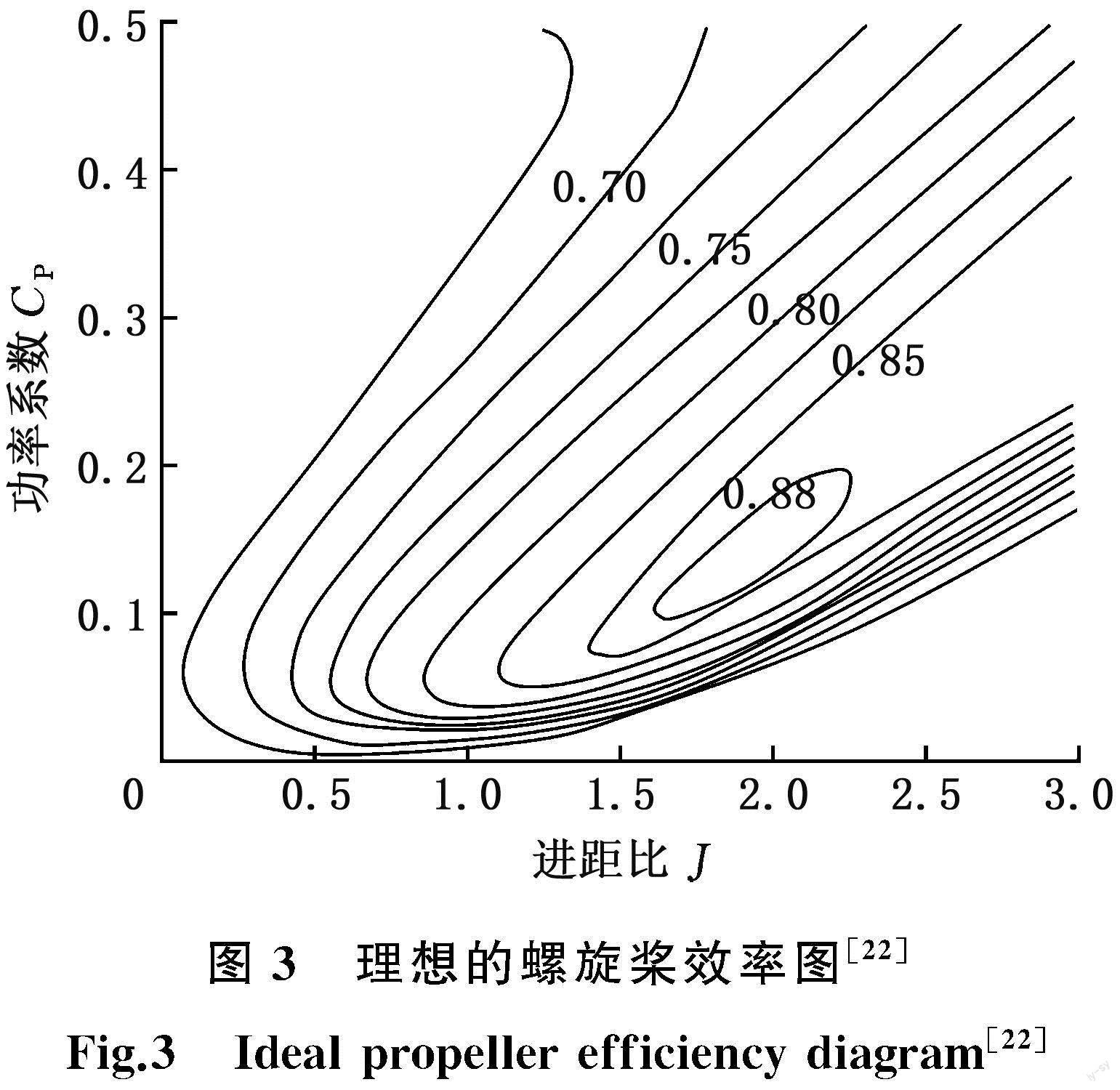
PLOF PVC≈NPcontiousηmηpηc(6) 式中,N為電機總個數;Ppeak、Pcontious為單個電機的峰值功率和持續功率;ηm為電機的工作效率;ηp為螺旋槳工作效率;ηc為電機控制器的工作效率。 電機個數選擇應與單個電機功率具有較好的匹配關系[18],如下式所示: 式中,PS1為匹配較好的單個電機功率;l為機翼的展長;kd為直徑系數;v為飛機飛行速度;σ為空氣相對密度;Ω為電機的轉速;D為參考機型螺旋槳直徑。 實際上分布式電推進飛機單個電機的功率為參考機型電機總功率除以電機個數的平均值: 式中,Pm為參考機型電機總功率。 當PS1與PS2近似相等時,電機功率與螺旋槳具有較好的匹配關系。 2.3 螺旋槳參數選擇 由于巡航在飛機任務階段中占比時間較長,且直接影響飛機的續航時間,因此螺旋槳直徑和性能參數估算應以巡航段作為設計參考點,相關公式[19]如下: 式中,Dp為螺旋槳的直徑;Psc為單個電機在飛機巡航時輸出功率;n為螺旋槳的轉速;Tsc為單個螺旋槳產生的牽引力;J為螺旋槳進距比;CT、CP分別為螺旋槳的拉力系數和功率系數。 2.4 電池組參數選擇 氫燃料電池搭配鋰電池的儲能方案應滿足驅動電機電壓變化要求,使得電池組輸出功率與電機負載匹配。選型的氫燃料電池節數設為n1,鋰電池節數設為n2;氫氣罐個數設為n3。單節氫燃料電池電壓記為UH2,輸出功率記為PH2,質量記為WH2;單節鋰電池電壓記為Ubat,輸出功率記為Pbat,質量記為Wbat,所含電能記為Ebat。單個70 MPa儲氫罐質量記為Wjar,質量儲氫密度記為ρmH2。 氫燃料電池與鋰電池輸出電壓之和應與電機工作電壓近似相等(不考慮額外電壓損耗),輸出功率之和經DC/DC轉換器、電機控制器效率損耗后提供電機負載功率,在滿足電池組總質量約束Wsum限制下,使得能量Esum達到最大。電池組能量包括鋰電池所含電量和氫氣罐高壓氫氣化學反應產生的化學能。設1 mol氫氣發生化學反應生成液態水所能產生的能量為Q,則Q=241 kJ/mol,每千克氫氣物質的量為500 mol,因此電池組總能量為 Esum=500n3WjarρmH2Q+n2Ebat(13) 電池組參數選擇可提煉為如下優化問題: 式中,ηDC為DC/DC轉換器的工作效率;Pmmax為電機總的峰值功率; Um為電機的工作電壓。 3 氫電鋰電動態平衡能量管理 實際上氫燃料電池的氫氣并不能完全消耗,燃料電池堆的最大轉化效率為0.6[20],而鋰電池為了保障飛機安全,通常也會留下20%的電池余量。 飛機在真實飛行中會受到突風影響,因此飛機的需用功率在不斷變化,為了模擬飛機功率變化情況,設置固定間隔時間內任務功率在±10%的范圍內變化。在氫電鋰電混合方案中,氫氣的單位時間消耗量隨著燃料電池的輸出功率變化而改變,導致鋰電池單位時間消耗能量與氫氣消耗量不能達到平衡,從而會出現鋰電池或燃料電池中某一能源過度消耗,而另一種能源消耗較少的情況。為了避免這種情況發生,本文設計了燃料電池混合能源的動態平衡能源策略,對燃料電池和鋰電池的功率進行動態分配[21]。氫氣剩余比例表示為SH2,鋰電池的剩余電量百分比表示為Sbat,以S(S=Sbat- SH2)表示二者之差。當鋰電池的剩余電量大于安全電量20%時,共對應三種情況: (1)S<-3%(負狀態),表示鋰電池相對于燃料電池消耗過快,燃料電池在下一間隔時間內應給鋰電池充電,鋰電池此時為充電時最大負功率,燃料電池同時給負載和鋰電池供電。 (2)-3%≤S≤3%(狀態均衡),表示鋰電池相對于燃料電池消耗基本處于持平狀態,在下一間隔時間內,鋰電池的輸出功率應保證燃料電池的效率ηFC最高。 (3)S>3%(正狀態),表示鋰電池相對燃料電池消耗要低,下一時刻應當將超出比例的電荷全部釋放掉。根據電荷和釋放時間,可以計算出鋰電池的輸出功率。 當鋰電池的剩余電量到達安全電量20%時,鋰電池不再工作,此時負載功率全部由燃料電池提供,直到氫氣完全消耗完。圖2為能量動態平衡策略流程示意圖。 氫氣和鋰電池初始剩余比例為1,根據鋰電池的剩余電流和兩者剩余的差值比例來判斷工作狀態,通過執行每種狀態下的算法對差值比例進行動態調整,保證鋰電池的耗電量和氫燃料電池的耗氫量維持動態平衡。圖2中,Pbat表示當前鋰電池的輸出功率;PFC表示當前燃料電池的輸出功率;Pload表示當前電機負載功率;ΔSbat表示鋰電池在Δt時間段內電量變化的百分比,ΔSbat=PbatΔt/Qtotal;ΔSH2為氫氣在Δt時間內消耗占比,ΔSH2=CFCΔt/mH2;CFC為單位時間內氫氣的消耗質量,可根據Ballard氫燃料電池公司提供的公式CFC=1.688 75FH2(ρH2/ρ)進行估算(FH2表示氫氣的流量,與燃料電池單元數量的電流大小有關;ρH2為氫氣在當前氣壓下的密度)。 4 應用算例 本文以19座級通勤飛機Y-12F作為研究對象,按照氫電鋰電推進系統參數匹配方法,對以燃油為動力的飛機動力裝置進行新能源選型。最后按照選型結果對任務功率進行動態分配,對推進系統能量儲備進行管理。 按照飛機總體設計要求和任務剖面運動方程計算各任務階段發動機需用功率,如表1所示。 根據任務需用功率和推進系統參數匹配方法,對電機、氫燃料電池、鋰電池、螺旋槳進行選型設計。選型的電機為10臺EMRAX 268電機,總干質量僅為223 kg。10臺電機最大總持續輸出功率為1170 kW,滿足任務功率需求,分別在機翼兩側各安裝5臺電機。圖3為理想的螺旋槳效率圖[22],根據螺旋槳的功率系數和所對應的進距比可獲得螺旋槳的效率。 螺旋槳類型選擇為三槳葉,代入相關數據計算可得螺旋槳直徑D為1.328 m,螺旋槳的拉力系數CT為0.08,功率系數CP為0.102。 選擇Ballard公司的FCgen-HPS氫燃料電池和SAFT公司的Seanergy的鋰離子動力電池。選擇Faurecia公司研發的高壓70 MPa儲氫瓶,52 L和68 L容積類型氣瓶的參數如表2所示。 目前電機裝置功率密度已經達到了4 kW/kg,氫燃料電池系統的功率密度為0.85 kW/kg,電機控制器的功率密度在10 kW/kg左右,70 MPa儲氫系統儲氫密度為4%。根據各分系統功率密度可計算出主要電力系統部件的質量,如表3所示。 根據所選型的新能源推進裝置,采用動態能量平衡管理策略對氫氣的消耗和鋰電池電能消耗進行動態調度,保證兩種能源消耗處于動態平衡狀態,能量動態平衡策略仿真結果如圖4所示。可以看出,燃料電池承擔大部分負載功率,而鋰電池對其負載功率進行補充,當鋰電池電量消耗過快時,燃料電池對鋰電池電量進行補充,維持二者消耗動態平衡。當鋰電池電量低于安全電量時,鋰電池不再工作,由燃料電池單獨負責任務負載,直到氫氣被完全消耗。氫氣推進系統設計布局示意如圖5所示。 5 分布式推進氣動分析 根據電機功率匹配結果,需要在機翼兩側前緣各安裝5個螺旋槳,保證螺旋槳產生的功率滿足巡航需求,當電機軸轉速發生改變時,螺旋槳的輸出功率也會隨之發生改變。螺旋槳相對機翼的安裝位置,不同位置螺旋槳的轉速、轉向會給氣動 計算帶來不同程度的影響。本文采用OpenVSP軟件中的VSPAERO氣動模塊進行計算,它集成了渦格法和面元法,螺旋槳特性求解方面包含了葉素法和激勵盤方法,文獻[23]使用此模塊對X57高升力螺旋槳進行計算,并與OVERFLOW的分析結果進行對比驗證,證明了該方法具有可靠的精度和較快的計算速度。 圖6為氣動模型示意簡圖,分別為氣動模型的俯視圖和后視圖,沿展向將機翼劃分為機身區和優化區,螺旋槳僅在優化區域內移動,每一個螺旋槳限制在虛線范圍內。為了研究螺旋槳轉向對氣動性能的影響,將轉向以數字量化,用Dir1,Dir2,…,Dir5表示右側機翼由翼根到翼梢5個螺旋槳的轉向,以飛行員視角,螺旋槳順時針方向記為“1”,螺旋槳逆時針轉向記為“0”。 以螺旋槳轉向作為設計輸入變量,激勵盤的位置和轉速不變,螺旋槳相對于機翼位置與圖6一致,設置螺旋槳轉速為巡航轉速,對右機翼螺旋槳所有轉向采用全析因試驗設計,共32種情況,輸出變量為升力系數、誘導阻力系數、摩擦阻力系數。通過改變螺旋槳的轉向分析每一個螺旋槳的轉向對輸出變量相關性影響,分析螺旋槳轉向對氣動帶來的增益或抑制效果。根據螺旋槳轉向全析因試驗設計結果,繪制了轉向對升力系數和誘導阻力系數影響的Pareto圖,如圖7所示,圖中low表示轉向取值為0(即逆時針轉向),high表示轉向取值為1(即順時針轉向)。 從氣動角度分析,如圖7a所示,沿機翼展向由翼根到翼梢,對升力影響較大的是螺旋槳3和螺旋槳5的轉向。螺旋槳3和螺旋槳4之間以逆順對轉,螺旋槳會產生上洗氣流,會加速滑流區氣流流動,從而增大升力系數。螺旋槳2和螺旋槳3之間以順逆對轉,會減少滑流區氣流流動,減小升力系數,但由于螺旋槳2對升力影響僅占7%,小于螺旋槳4對升力的影響,因此從螺旋槳1到螺旋槳4最佳轉向為逆—順—逆—順,而對于翼尖螺旋槳5,采用順時針旋轉會產生下洗氣流,抑制下翼面在翼尖處上翻氣流,減少翼尖渦流的影響,剛好對誘導阻力產生抑制作用,對提高升力有顯著增益效果。而對于誘導阻力,如圖7b所示,翼尖螺旋槳5與圖7a原理一致,而要減少誘導阻力,相鄰螺旋槳旋轉方向應產生下洗氣流或盡可能抑制上洗氣流,減少由升力引起的附加阻力。螺旋槳2相對于螺旋槳1能產生下洗氣流,同時螺旋槳3相對于螺旋槳2能抑制螺旋槳2引起的上洗氣流。在32組轉向配置中,最有利于增大升力系數CL、減小誘導阻力系數CDi的轉向如圖8所示。 為了進一步說明螺旋槳對機翼升力系數的影響,繪制了分布式構型、雙發構型、無槳構型升力系數展向分布圖,見圖9。分布式構型和雙發構型相對于無槳構型,在有螺旋槳位置處升力系數突變增大,使得整體升力系數增大。而對比雙發構型和分布式推進構型,雙發構型升力系數呈雙峰分布,而分布式推進構型呈現多峰分布。分布式推進方案較雙發方案,升力系均值數由0.705提高到0.720,而誘導阻力系數出現顯著下降趨勢,由0.0127減小到0.0104,從而使得全機總的升阻比得到較大提高。 6 結論 (1)針對氫電鋰電混動架構方案,提出了新能源推進裝置選型和參數匹配方法,建立了燃電鋰電能量動態平衡策略。 (2)以19座級通勤飛機Y12F為應用示例,對推進裝置進行新能源選型設計,根據選型裝置對氫氣的消耗和鋰電池電能消耗進行了動態調度。 (3)采用全析因試驗設計方法對分布式氣動布局中螺旋槳的32種轉向配置方案進行了分析,獲得了最優轉向。 參考文獻: [1] 孫俠生, 程文淵, 穆作棟, 等. 電動飛機發展白皮書[J]. 航空科學技術, 2019, 30(11):1-7. SUN Xiasheng, CHENG Wenyuan, MU Zuodong, et al. White Paper on the Development of Electric Aircraft[J]. Aeronautical Science & Technology,2019,30(11):1-7. [2] TRAINELLI L, SALUCCI F, COMINCINI D, et al. Sizing and Performance of Hydrogen-driven Air-planes[C]∥Italian Association of Aeronautics and Astronautics ⅩⅩⅤ International Congress. Roma, 2019:1058-1065. [3] PALAIA G, SALEM K A, CIPOLLA V, et al. Conceptual Investigation on Performance of Short-medium Range Aircraft with Liquid Hydrogen Propulsion and Different Airframe Architectures[C]∥AIAA SCITECH 2023 Forum. National Harbor,2023:0214. [4] WADDINGTON E, MERRET J M, ANSELL P J. Impact of LH2 Fuel Cell-electric Propulsion on Aircraft Configuration and Integration[C]∥AIAA Aviation 2021 Forum. Virtual Event, 2021:2409. [5] PASTRA C L, CINAR G, MAVRIS D N. Feasibility and Benefit Assessments of Hybrid Hydrogen Fuel Cell and Battery Configurations on a Regional Turboprop Aircraft[C]∥AIAA AVIATION 2022 Forum. Chicago, 2022:3290. [6] 黃俊.分布式電推進飛機設計技術綜述[J].航空學報,2021,42(3):13-29. HUANG J. Survey on Design Technology of Distributed Electric Propulsion Aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(3):624037. [7] 荊戈. 燃料電池輕型飛機概念設計研究[D]. 南京:南京航空航天大學,2017. JING Ge. A Study on Conceptual Design of Fuel-cell Powered Electrical Light Aircraft[D]. Nanjing:Nanjing University of Aeronautics and Astronautics, 2017. [8] 李毅波,林鵬,陶曉洋,等.空地兩用燃料電池輕型飛機總體參數設計與建模[J].飛機設計,2016,36 (5):29-33. LI Yibo, LIN Peng, TAO Xiaoyang,et al. Overall Parameter Design and Modeling of Air-ground Fuel Cell Light Aircraft[J]. Aircraft Design, 2016,36 (5):29-33. [9] 劉福佳,楊鳳田,劉孟詔,等.電動輕型飛機起飛總質量估算方法[J].科學技術與工程,2018,18(5):118-123. LIU Fujia, YANG Fengtian,LIU Mengzhao,et al. Estimated Method of the Take-off Mass of the Electric Light Aircraft[J]. Science Technology and Engineering,2018,18(5):118-123. [10] 孔祥浩,張卓然,陸嘉偉,等.分布式電推進飛機電力系統研究綜述[J].航空學報,2018,39(1):51-67. KONG Xianghao, ZHANG Zhuoran, LU Jiawei,et al. Research on Distributed Electric Propulsion Aircraft Power System[J]. Acta Aeronautica et Astronautica Sinica, 2018,39(1):51-67. [11] ARAT H T, SRER M G, GKPINAR S, et al. Conceptual Design Analysis for a Lightweight Aircraft with a Fuel Cell Hybrid Propulsion System[J]. Energy Sources, Part A:Recovery, Utilization, and Environmental Effects, 2020:1-15. [12] 侯緒凱, 趙田田, 孫榮峰,等. 中國氫燃料電池技術發展及應用現狀研究[J]. 當代化工研究, 2022(17):112-117. HOU Xukai, ZHAO Tiantian, SUN Rongfeng, et al. Research on the Development and Application Status of Hydrogen Fuel Cell Technology in China[J].Modern Chemical Research,2022(17):112-117. [13] 宋清超,陳家偉,蔡坤城,等.多電飛機用燃料電池-蓄電池-超級電容混合供電系統的高可靠動態功率分配技術[J].電工技術學報,2022,37(2):445-458. SONG Qingchao,CHEN Jiawei,CAI Kuncheng,et al. A Highly Reliable Power Allocation Technology for the Fuel Cell-battery-supercapacitor Hybrid Power Supply System of a More Electric Aircraft[J].Transactions of China Electrotechnical Society, 2022,37(2):445-458. [14] 蘇海燕,徐恒泳. 儲氫材料研究進展[J]. 天然氣化工, 2005, 30(6):47-53. SU Haiyan,XU Hengyong. Progress in Hydrogen Storage Material[J].Natural Gas Chemical Industry, 2005, 30(6):47-53. [15] 陶占良,彭博,梁靜,等. 高密度儲氫材料研究進展[J]. 中國材料進展, 2009, 28(增刊1):26-40. TAO Zhanliang,PENG Bo,LIANG Jing, et al. Progress in Research of High Density Hydrogen Storage Materials[J].Materials China, 2009, 28(S1):26-40. [16] 王騰飛,寇淑然,任柏春,等. 電動航空器發展狀況分析[J]. 科技視界, 2022(23):25-27. WANG Tengfei, KOU Shuran, REN Baichun, et al. Analysis of the Development of Electric Aircraft[J]. Science Technology Vision, 2022(23):25-27. [17] 康桂文,胡雨,李亞東,等. 超輕型電動飛機電動力系統的參數匹配[J]. 航空動力學報, 2013,28(12):2641-2647. KANG Guiwen,HU Yu,LI Yadong, et al. Parameters Matching of Ultralight Electric Aircraft Propulsion System[J]. Journal of Aerospace Power, 2013,28(12):2641-2647. [18] 戴佳哲. 分布式電推進系統與機翼的綜合設計[J]. 機械設計與制造, 2020(2):56-59. DAI Jiazhe. Integrated Design of Distributed Electric Propulsion System and Wing[J]. Machinery Design Manufacture,2020(2):56-59. [19] GUDMUNDSSON S. General Aviation Aircraft Design:Applied Methods and Procedures[M]. Oxford:Butterworth-Heinemann Press,2013. [20] 曾勛. 燃料電池技術發展概述[J]. 科教導刊—電子版(中旬), 2018(2):247-248. ZENG Xun. Overview of Fuel Cell Technology Development[J]. The Guide of Science Education, 2018(2):247-248. [21] 雷濤, 閔志豪, 付紅杰. 燃料電池無人機混合電源動態平衡能量管理策略[J].航空學報, 2020, 41(12):293-307. LEI Tao, MING Zhihao, FU Hongjie. Dynamic Balanced Energy Management Strategies for Fuel Cell Hybrid Power System of Unmanned Air Vehicle[J]. Acta Aeronautica et Astronautica Sinca, 2020, 41(12):293-307. [22] RAYMER D. Aircraft Design:a Conceptual Approach[M]. Playa del Rey :American Institute of Aeronautics and Astronautics, Inc., 2012. [23] SHERIDAN C N, PHAM D D, WHITESIDE S. Evaluation of VSPAERO Analysis Capabilities for Conceptual Design of Aircraft with Propeller-Blown Wings[C]∥AIAA Aviation 2021 Forum. Virtual Event, 2021:2510.
