基于深度學(xué)習(xí)的室內(nèi)目標(biāo)波達(dá)方向估計(jì)
2024-02-21 11:15:08鄧偉鑫
無線電通信技術(shù) 2024年1期
鄧偉鑫,高 暉*,唐 勐,粟 欣,彭 瑩,蘇 昕
(1.北京郵電大學(xué) 信息與通信工程學(xué)院,北京 100876;2.清華大學(xué) 信息科學(xué)技術(shù)學(xué)院,北京 100084;3.中信科移動(dòng)通信技術(shù)股份有限公司,北京 100083)
0 引言
隨著無線通信系統(tǒng)的不斷發(fā)展與演進(jìn),超五代及第六代移動(dòng)通信將提供更高的技術(shù)指標(biāo)[1]。當(dāng)前,多輸入多輸出(Multiple-Input Multiple-Output,MIMO)系統(tǒng)具有高信號(hào)增益、強(qiáng)干擾抑制能力及高空間分辨力等優(yōu)點(diǎn)[2-3],這使其有望同時(shí)具備通信和感知能力,實(shí)現(xiàn)高速率通信和高精度感知[4]。此外,隨著移動(dòng)互聯(lián)網(wǎng)、物聯(lián)網(wǎng)以及新型設(shè)備的快速發(fā)展,越來越多的智能化應(yīng)用出現(xiàn)在人們面前,如室內(nèi)定位及追蹤[5]、人體活動(dòng)檢測(cè)[6]等,這些應(yīng)用需要高精度、高實(shí)時(shí)的感知技術(shù)支持,快速準(zhǔn)確的波達(dá)方向(Direction of Arrival,DoA)估計(jì)[7]是關(guān)鍵技術(shù)之一。與室外環(huán)境不同,室內(nèi)環(huán)境下DoA估計(jì)面臨多徑和障礙的挑戰(zhàn),這些挑戰(zhàn)導(dǎo)致接收信號(hào)幅相特性變化從而對(duì)DoA估計(jì)產(chǎn)生不利的影響,此外室內(nèi)場(chǎng)景中行人身體姿態(tài)的變化及位置移動(dòng)、大型機(jī)器設(shè)備的運(yùn)動(dòng)都將導(dǎo)致電磁特性復(fù)雜多變,傳統(tǒng)DoA估計(jì)技術(shù)在室內(nèi)場(chǎng)景直接運(yùn)用時(shí)性能較差[8]。
傳統(tǒng)的DoA估計(jì)方法,如最大似然估計(jì)(Maximum Likelihood,ML),通過求得方向估計(jì)似然函數(shù)的最優(yōu)解來估計(jì)DoA[9-10];基于噪聲子空間的多重信號(hào)分類(Multiple Signal Classification,MUSIC)方法[11],通過特征值分解劃分信號(hào)子空間,然后根據(jù)噪聲/信號(hào)子空間正交性估計(jì)DoA[12-13]。這些方法因高分辨率而得到廣泛使用,然而多徑環(huán)境將導(dǎo)致視距(Line of Sight,LoS)徑信號(hào)分辨困難以及多徑分量之間具有相干性,對(duì)傳統(tǒng)方法估計(jì)精度造成不利影響,此外這些方法涉及多次迭代以及特征值分解等高復(fù)雜度運(yùn)算,難以實(shí)現(xiàn)高實(shí)時(shí)性估計(jì)。因此亟待一些面向室內(nèi)場(chǎng)景的高精度、高實(shí)時(shí)DoA估計(jì)技術(shù)。
1 相關(guān)工作
近年來,機(jī)器學(xué)習(xí)在解決信號(hào)處理問題方面顯示出許多優(yōu)勢(shì)[14-15],一些研究將機(jī)器學(xué)習(xí)應(yīng)用于DoA估計(jì)問題[16-19]。在傳統(tǒng)的機(jī)器學(xué)習(xí)方法中,Malajner等人[18]提出了基于接收信號(hào)強(qiáng)度指示(Received Signal Strength Indicator,RSSI)和支持向量機(jī)的DoA估計(jì)方法,以RSSI為數(shù)據(jù)集使用支持向量機(jī)方法。董川源[19]提出了基于梯度提升樹與集成學(xué)習(xí)原理的極限梯度提升(Extreme Gradient Boosting,XGBoost)方法來進(jìn)行DoA估計(jì)。但這些方法僅對(duì)非多徑環(huán)境DoA估計(jì)有效,受到多徑環(huán)境的不利影響,難以解決過擬合、維度災(zāi)難等機(jī)器學(xué)習(xí)難題[20]。
相比傳統(tǒng)的機(jī)器學(xué)習(xí)方法,深度學(xué)習(xí)(Deep Learning,DL)不依賴可解釋模型設(shè)計(jì),自主從大量原始數(shù)據(jù)中學(xué)習(xí),提取數(shù)據(jù)高級(jí)特征。DL模型具備更好的預(yù)測(cè)性能,且訓(xùn)練好的網(wǎng)絡(luò)只需要簡單的推斷就可以完成估計(jì)。現(xiàn)有基于DL的DoA估計(jì)研究一般以接收信號(hào)及其各種處理形式作為網(wǎng)絡(luò)輸入,以矯正的接收信號(hào)或預(yù)測(cè)角度等作為輸出[21-26]。一些團(tuán)隊(duì)提出基于深度神經(jīng)網(wǎng)絡(luò)(Deep Neural Network,DNN)的DoA估計(jì)方法[23-24],通過訓(xùn)練多層隱藏層對(duì)目標(biāo)DoA在角度域網(wǎng)格上進(jìn)行分類。Chen等人[25]通過劃分扇區(qū)分區(qū)域進(jìn)行DoA估計(jì),設(shè)計(jì)探測(cè)網(wǎng)絡(luò)以及估計(jì)網(wǎng)絡(luò),前者對(duì)信源目標(biāo)進(jìn)行區(qū)域分類,后者進(jìn)行DoA估計(jì),降低了時(shí)間開銷。此外,DL也可用于增強(qiáng)傳統(tǒng)方法,Elbir[26]提出DeepMUSIC方法,設(shè)計(jì)了特征提取能力更強(qiáng)的卷積神經(jīng)網(wǎng)絡(luò)(Convolutional Neural Network,CNN)重構(gòu)MUSIC譜峰函數(shù)以增強(qiáng)MUSIC方法,減少計(jì)算量并提高估計(jì)精度。這些研究針對(duì)特定場(chǎng)景構(gòu)建數(shù)據(jù)集,取得了較好性能,然而在室內(nèi)環(huán)境下仍具有局限:一是未考慮場(chǎng)景中未知多徑信號(hào)的影響,嚴(yán)重扭曲信號(hào)的相位特性分布,降低了估計(jì)精度;二是面對(duì)多徑環(huán)境沒有刻意訓(xùn)練模型分辨LoS徑信號(hào)的能力;三是尚未有研究考慮電磁環(huán)境變化的潛在挑戰(zhàn),模型不具備適應(yīng)環(huán)境變化的魯棒性。
對(duì)DoA估計(jì)方法展開研究,提出了一種基于DL的室內(nèi)目標(biāo)DoA估計(jì)方法,訓(xùn)練CNN用于室內(nèi)目標(biāo)DoA估計(jì),并設(shè)計(jì)了一種基于小樣本學(xué)習(xí)(Few-Shot Learning,FSL)的快速模型更新機(jī)制。將所提方法簡記為FSL-CNN方法,進(jìn)一步從DoA估計(jì)拓展到對(duì)目標(biāo)位置的感知。主要研究內(nèi)容如下:
① 提出了基于DL的室內(nèi)目標(biāo)DoA估計(jì)方法。設(shè)計(jì)了一個(gè)用于DoA估計(jì)的深度卷積網(wǎng)絡(luò),利用有監(jiān)督的DL訓(xùn)練CNN對(duì)抗多徑影響,提升模型從多徑分量中分辨提取LoS徑信號(hào)DoA特征的能力,并針對(duì)室內(nèi)環(huán)境構(gòu)建數(shù)據(jù)集,并以此為訓(xùn)練模型,訓(xùn)練完成的模型實(shí)現(xiàn)了高精度、高實(shí)時(shí)的DoA估計(jì)。相比ML、MUSIC等傳統(tǒng)方法,所提FSL-CNN方法在時(shí)間復(fù)雜度上有顯著優(yōu)勢(shì);相比DNN、DeepMUSIC等DL方法,所提方法具有更高的精度和較低的時(shí)間開銷。
② 基于FSL設(shè)計(jì)了在線學(xué)習(xí)機(jī)制。考慮提升模型在面對(duì)電磁環(huán)境變化情況下的魯棒性能,預(yù)訓(xùn)練模型在首次部署時(shí)根據(jù)實(shí)際部署環(huán)境,在線學(xué)習(xí)少量數(shù)據(jù),更新網(wǎng)絡(luò)部分參數(shù),完成模型微調(diào)。面對(duì)電磁環(huán)境變化的情況,基站按需獲取新數(shù)據(jù),快速更新模型。引入FSL[27-28]可以提高模型對(duì)環(huán)境的泛化性和魯棒性,相比重新訓(xùn)練,所提在線學(xué)習(xí)機(jī)制具有更高效能。
③ 基于DeepMIMO數(shù)據(jù)集展開了仿真實(shí)驗(yàn)。在DeepMIMO的Indoor1[29]環(huán)境下進(jìn)行仿真實(shí)驗(yàn),結(jié)果驗(yàn)證了所提FSL-CNN方法實(shí)現(xiàn)的效能優(yōu)勢(shì)。作為應(yīng)用示例,進(jìn)一步討論了基于DoA估計(jì)的多站協(xié)同室內(nèi)目標(biāo)定位方案,在室內(nèi)環(huán)境下達(dá)到了0.017 4 m的平均定位誤差。
2 系統(tǒng)模型
基于陣列天線構(gòu)建了DoA估計(jì)方法所需的接收信號(hào)模型。如圖1所示,考慮一個(gè)室內(nèi)上行場(chǎng)景,以單基站為例,其為K名目標(biāo)用戶提供服務(wù)。基站具有M根接收天線,配備了均勻線性陣列,各陣元間距為d,取半波長,每名用戶均配備單天線發(fā)射機(jī)。為了實(shí)現(xiàn)對(duì)目標(biāo)用戶DoA的估計(jì),設(shè)定場(chǎng)景中來自K名用戶的入射信號(hào)si(t)=[s1,s2,…,sNs]∈1×Ns,i=1,2,…,K;Ns是快拍數(shù),來自不同用戶的入射信號(hào)相互獨(dú)立,且與噪聲也相互獨(dú)立。假設(shè)天線陣部署位置與目標(biāo)用戶具有足夠距離,可將目標(biāo)發(fā)射信號(hào)視為遠(yuǎn)場(chǎng)平面波。設(shè)定分別來自K名目標(biāo)用戶的入射信號(hào)方向角為θ1、θ2、…、θk。

圖1 室內(nèi)目標(biāo)DoA估計(jì)場(chǎng)景Fig.1 Indoor target DoA estimation scenes
假設(shè)基站側(cè)的接收信號(hào)表示為X(t)=[x(t),x2(t),…,xM(t)]T∈M×Ns,具體表達(dá)式為:
X(t)=AS(t)+N(t),
(1)
式中:A=[a(θ1),a(θ2),…,a(θk)]∈M×K是由K個(gè)陣列導(dǎo)向矢量組成的矩陣,導(dǎo)向矢量表示為M×1,i=1,2,…,K;S(t)=[s1(t),s2(t),…,sK(t)]T∈K×Ns表示來自K個(gè)不同信源的入射信號(hào)矩陣,N(t)=[n1(t),n2(t),…,nM(t)]T∈M×Ns表示噪聲矩陣,其中各噪聲向量滿足獨(dú)立同分布,并且有ni(t)~N(0,σ2),i=1,2,…,M;σ2為噪聲功率。
進(jìn)一步,如果環(huán)境中存在多徑信號(hào),設(shè)多徑數(shù)為L(不包含直射徑),則接收信號(hào)可改寫為多徑信號(hào)的求和。
(2)

為獲取DoA信息,計(jì)算接收信號(hào)的協(xié)方差矩陣是一個(gè)良好的選擇。以無多徑為例,為不失一般性,忽略時(shí)間標(biāo)簽t,則接收信號(hào)的協(xié)方差矩陣RX∈M×M表示為:
RX=E[XXH]=ARsAH+σ2IM,
(3)
式中:Rs∈K×K為入射信號(hào)的自相關(guān)矩陣,由于信源信號(hào)與噪聲之間不相關(guān),可以得到AE[SNH]和E[NSH]AH為0,因而接收信號(hào)的協(xié)方差矩陣如 式(3)右側(cè)所示。實(shí)際情況下無法根據(jù)式(3)求得概率平均值,因此如式(4)所示計(jì)算算術(shù)平均值來近似表示接收信號(hào)的協(xié)方差矩陣。由對(duì)稱性,僅取協(xié)方差矩陣的上三角部分作為參數(shù)以減少輸入神經(jīng)網(wǎng)絡(luò)的數(shù)據(jù)量:
(4)
3 基于DL的DoA估計(jì)
對(duì)基于DL的DoA估計(jì)框架、室內(nèi)環(huán)境數(shù)據(jù)集構(gòu)建、模型的設(shè)計(jì)訓(xùn)練以及更新4個(gè)重要組成部分進(jìn)行詳細(xì)介紹。
3.1 基于DL的DoA估計(jì)框架
估計(jì)框架包含離線訓(xùn)練、在線估計(jì)以及模型更新階段,如圖2所示。離線訓(xùn)練階段通過大量數(shù)據(jù)訓(xùn)練模型;在線估計(jì)階段輸入采集的接收信號(hào)樣本進(jìn)行DoA估計(jì);模型更新階段基站按需通過當(dāng)前采集數(shù)據(jù)對(duì)模型進(jìn)行更新。估計(jì)模型以接收信號(hào)協(xié)方差矩陣上三角部分作為源數(shù)據(jù)輸入,進(jìn)一步執(zhí)行數(shù)據(jù)預(yù)處理得到數(shù)據(jù)集:① 為方便DL模型處理,需要將復(fù)矩陣分成實(shí)部和虛部兩部分,再通過扁平化重組成一維向量;② 為使樣本向量在進(jìn)行點(diǎn)乘運(yùn)算或其他計(jì)算時(shí)擁有統(tǒng)一的標(biāo)準(zhǔn),進(jìn)行歸一化處理。采用監(jiān)督學(xué)習(xí)的方式訓(xùn)練模型,除對(duì)接收信號(hào)進(jìn)行上述處理得到的數(shù)據(jù)集外,還需要輸入與之對(duì)應(yīng)的LoS徑DoA角作為標(biāo)簽數(shù)據(jù)。
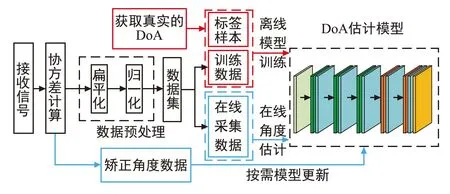
圖2 基于DL的DoA估計(jì)框架Fig.2 DL-based DoA estimation framework
3.2 數(shù)據(jù)集構(gòu)建
針對(duì)室內(nèi)環(huán)境DoA估計(jì)構(gòu)建數(shù)據(jù)集。DeepMIMO數(shù)據(jù)集[29]由Wireless Insite軟件生成,是一個(gè)面向MIMO系統(tǒng)的公開DL數(shù)據(jù)集,其基于精確的3D射線跟蹤方法生成,廣泛支持基于DL的通信和感知應(yīng)用。
依據(jù)DeepMIMO構(gòu)建室內(nèi)環(huán)境下DoA估計(jì)的數(shù)據(jù)集,選擇實(shí)驗(yàn)場(chǎng)景為室內(nèi)環(huán)境Indoor1。通過DeepMIMO數(shù)據(jù)生成器,依照?qǐng)鼍爸嘘P(guān)鍵參數(shù)設(shè)置生成DeepMIMO數(shù)據(jù)集;其中包含大量信息,需要對(duì)所需信息進(jìn)行提取,例如接收信號(hào),基站與目標(biāo)用戶的位置、角度關(guān)系等。進(jìn)一步,將該數(shù)據(jù)中的基站-用戶角度信息作為標(biāo)簽數(shù)據(jù)y,然后對(duì)接收信號(hào)數(shù)據(jù)按算 法1處理得到室內(nèi)目標(biāo)DoA估計(jì)數(shù)據(jù)集。以預(yù)測(cè)的DoA結(jié)果作為網(wǎng)絡(luò)的輸出Z,構(gòu)建網(wǎng)絡(luò)的輸入-輸出對(duì){d,Z}其中d∈M(M+1)×1、Z∈K×1分別表示網(wǎng)絡(luò)的輸入和輸出,最終數(shù)據(jù)集構(gòu)建方法如下。

算法1 數(shù)據(jù)集構(gòu)建輸入:數(shù)據(jù)集樣本總數(shù)U,接收信號(hào)X,Z輸出:數(shù)據(jù)集1:初始化u=1以及數(shù)據(jù)集長度U2:for 1≤u≤U do3:生成接收信號(hào)樣本X(u)4:利用式(4)計(jì)算X的協(xié)方差矩陣R(u)X 5:雙通道扁平化處理得到^d(u) = [Re(R(u)X ),Im(R(u)X )]T6:對(duì)^d(u)進(jìn)行歸一化處理得到d(u) =[cov(u)real,cov(u)Imag]T7:設(shè)計(jì)數(shù)據(jù)集輸入(u)in={d(u)} ,輸出(u)out={Z(u)} 8:構(gòu)建數(shù)據(jù)集(u)={(u)in,(u)out}9:u←u+110:end for u
3.3 模型設(shè)計(jì)和訓(xùn)練
構(gòu)建數(shù)據(jù)集之后,設(shè)計(jì)了DoA估計(jì)模型。該模型主要由卷積層和全連接層構(gòu)成,具體如圖3所示。將數(shù)據(jù)集饋送到神經(jīng)網(wǎng)絡(luò)中進(jìn)行訓(xùn)練,采用多層神經(jīng)網(wǎng)絡(luò)模型對(duì)訓(xùn)練集進(jìn)行求解,得到各神經(jīng)網(wǎng)絡(luò)節(jié)點(diǎn)的權(quán)值,根據(jù)最小化損失函數(shù)確定網(wǎng)絡(luò)節(jié)點(diǎn)的最優(yōu)權(quán)值。

圖3 基于DL的DoA估計(jì)之神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)Fig.3 Neural network structure of DoA estimation based on DL
本文采用了卷積層、池化層、整流線性單元(Rectified Linear Unit,ReLU)激活函數(shù)層、全連接層等結(jié)構(gòu)來設(shè)計(jì)深度卷積網(wǎng)絡(luò)模型。網(wǎng)絡(luò)模型的輸入為:
d=[covreal,covImag]T,
(5)

y=[θlabel(1),θlabel(2),…,θlabel(k)]。
(6)

(7)
式中:f1(·)表示輸入層,將輸入數(shù)據(jù)傳遞給隱藏層;{fi(·)}i={2,5,8}表示卷積層,通過卷積運(yùn)算提取數(shù)據(jù)中含有的DoA特征,尤其從多徑分量中學(xué)習(xí)LoS徑信號(hào)的特征;{fi(·)}i={3,6,9}、 {fi(·)}i={4,7,10,12,14}分別表示最大池化層、激活層,實(shí)現(xiàn)特征降維和非線性輸出以提高模型學(xué)習(xí)能力;{fi(·)}i={11,13}表示全連接層,實(shí)現(xiàn)由特征到目標(biāo)DoA的映射關(guān)系;f15(·)表示輸出層。使用ReLU作為激活函數(shù)提升模型的學(xué)習(xí)能力,其表示為ReLU(x)=max(0,x)。
為不失一般性,每次訓(xùn)練假設(shè)使用相同的隨機(jī)初始權(quán)重和偏置值。此外,為提高模型估計(jì)的準(zhǔn)確性,使用Adam優(yōu)化器[30]實(shí)現(xiàn)反向傳播(Back Propagation,BP)方法,對(duì)模型參數(shù)進(jìn)行調(diào)整。損失函數(shù)設(shè)計(jì)為當(dāng)輪訓(xùn)練輸出的DoA估計(jì)值和真實(shí)值的均方誤差(Mean Square Error,MSE):
(8)

3.4 DoA估計(jì)和模型更新
訓(xùn)練完成后各層網(wǎng)絡(luò)權(quán)重固定,輸入新采集的接收信號(hào)數(shù)據(jù)可實(shí)現(xiàn)DoA估計(jì)。為了使模型有效適應(yīng)所部署的場(chǎng)景,使用了一種小樣本增量[27-28]學(xué)習(xí)的策略,能夠有機(jī)結(jié)合完成訓(xùn)練的模型和在線采集的數(shù)據(jù),提升模型在實(shí)際部署中的準(zhǔn)確性。具體的方法執(zhí)行流程示意如圖4所示,基站交替執(zhí)行DoA估計(jì)和其他任務(wù)的同時(shí),對(duì)新的無線數(shù)據(jù)進(jìn)行采集,模型基于新的數(shù)據(jù)按需進(jìn)行更新。

圖4 方法執(zhí)行流程示意圖Fig.4 Schematic diagram of algorithm execution process
DoA估計(jì)階段,基站采集當(dāng)前場(chǎng)景下的陣列接收信號(hào),并計(jì)算得到協(xié)方差矩陣。為保證數(shù)據(jù)的一致性,這一階段使用與離線階段相同的數(shù)據(jù)預(yù)處理操作得到在線估計(jì)階段的數(shù)據(jù),隨后將在線估計(jì)階段陣列捕獲的數(shù)據(jù)輸入到模型中進(jìn)行估計(jì)。
執(zhí)行其他感知任務(wù)階段,基站基于已采集信號(hào)數(shù)據(jù)按需進(jìn)行模型更新。需要更新模型時(shí),基站根據(jù)所部署平臺(tái)的計(jì)算資源情況,在不影響DoA估計(jì)及其他感知任務(wù)運(yùn)行的前提下對(duì)少量接收信號(hào)數(shù)據(jù)執(zhí)行ML方法得到校準(zhǔn)的DoA,隨后利用這些接收信號(hào)數(shù)據(jù)及其校準(zhǔn)的DoA制作數(shù)據(jù)集作為模型更新階段的輸入。由于校準(zhǔn)的DoA獲取并行于持續(xù)運(yùn)行的DoA估計(jì)及其他感知,因而進(jìn)行所提方法DoA估計(jì)時(shí)間評(píng)估時(shí)忽略ML方法校準(zhǔn)帶來的高復(fù)雜度影響。
模型更新階段,基于FSL思想更新模型。通過少量的訓(xùn)練數(shù)據(jù)來訓(xùn)練模型[27],以學(xué)習(xí)和識(shí)別新的實(shí)例。采用基于模型微調(diào)的FSL方法,通過增加新的訓(xùn)練樣本,在已有描述舊數(shù)據(jù)的特征之上加入新數(shù)據(jù)的特征,不斷更新模型的參數(shù),使得模型能夠適應(yīng)新的類別[28]。這種學(xué)習(xí)方式可以使模型基于原有知識(shí)提高學(xué)習(xí)新知識(shí)的效率,而不會(huì)使新知識(shí)覆蓋舊知識(shí)。基于上述思想,設(shè)計(jì)更新方案:模型在已有訓(xùn)練的基礎(chǔ)上,僅依靠少量樣本學(xué)習(xí)新的特征,基于式(8)和BP方法快速完成參數(shù)的更新,提高模型對(duì)不同環(huán)境的適應(yīng)性。相比重新訓(xùn)練,在原有模型上進(jìn)行更新,可以減少訓(xùn)練輪次,降低訓(xùn)練時(shí)間。
模型更新如圖5所示,通過饋入少量新數(shù)據(jù),更新全連接層的權(quán)重參數(shù)實(shí)現(xiàn)在線估計(jì)階段模型快速更新。首先,根據(jù)實(shí)際部署的環(huán)境,當(dāng)采集到新的少量數(shù)據(jù)時(shí),對(duì)新數(shù)據(jù)進(jìn)行預(yù)處理得到新數(shù)據(jù)集;然后,加載預(yù)訓(xùn)練模型,凍結(jié)參數(shù)使得在BP過程中這些層的權(quán)重固定不變,因?yàn)樵摬糠纸Y(jié)構(gòu)具備了在多徑環(huán)境下提取DoA特征的能力而無需在某個(gè)特定場(chǎng)景下再針對(duì)這部分結(jié)構(gòu)進(jìn)行調(diào)整;最后,設(shè)置優(yōu)化器對(duì)全連接層進(jìn)行訓(xùn)練,優(yōu)化器的配置和離線階段訓(xùn)練整個(gè)模型時(shí)的配置保持一致。調(diào)整全連接層是因?yàn)檫@一部分結(jié)構(gòu)主要用于特征向估計(jì)角的映射,在不同環(huán)境下存在不同映射關(guān)系,針對(duì)特定環(huán)境進(jìn)行特定映射關(guān)系學(xué)習(xí)將有效提高估計(jì)精度[22]。在已有模型基礎(chǔ)上,這部分的更新僅需輸入少量數(shù)據(jù)就能達(dá)到良好的估計(jì)性能。

圖5 模型更新Fig.5 Model updating
3.5 時(shí)間復(fù)雜度分析
表1展示了各方法時(shí)間復(fù)雜度:ML方法首先需要計(jì)算協(xié)方差矩陣RX,然后基于交替投影方法搜索最優(yōu)解,ML方法復(fù)雜度為O(Kp(M3+M2K+2K2M+K3)),p為最優(yōu)解搜索次數(shù);MUSIC方法計(jì)算協(xié)方差矩陣RX后進(jìn)行特征值分解,最后譜峰搜索,因此MUSIC方法復(fù)雜度為O(s(M3+M2K+K2M)),s為譜峰搜索步數(shù);本文所提方法計(jì)算復(fù)雜度取決于神經(jīng)網(wǎng)絡(luò)計(jì)算復(fù)雜度,具體為O(aM2+bK),其中a和b是與網(wǎng)絡(luò)模型設(shè)置相關(guān)的常數(shù)。顯然,引入DL可以實(shí)現(xiàn)更低的時(shí)間開銷。

表1 時(shí)間復(fù)雜度對(duì)比Tab.1 Calculation complexity comparison
4 仿真結(jié)果與分析
4.1 仿真配置
本文仿真使用MIMO通信中具有代表性的DeepMIMO數(shù)據(jù)集[29]驗(yàn)證所提方法的可行性。設(shè)計(jì)場(chǎng)景為Indoor1生成的矩形房間,該室內(nèi)場(chǎng)景中放置4個(gè)基站,分別部署在房間的4個(gè)角落,仿真DoA估計(jì)時(shí)設(shè)置某個(gè)基站開啟工作。基站具有16陣元,場(chǎng)景信源數(shù)為2個(gè),載波信號(hào)頻率為2.5 GHz,信噪比(Signal to Noise Ratio,SNR)設(shè)為[-10∶5∶10] dB,多徑數(shù)L為3(信號(hào)能量主要集中在L個(gè)多徑分量上),快拍數(shù)Ns為512,譜峰搜索的間隔步長為0.1°。選擇80 600個(gè)樣本按8∶2比例劃分訓(xùn)練集和測(cè)試集。網(wǎng)絡(luò)訓(xùn)練具體超參數(shù)設(shè)置如表2所示。
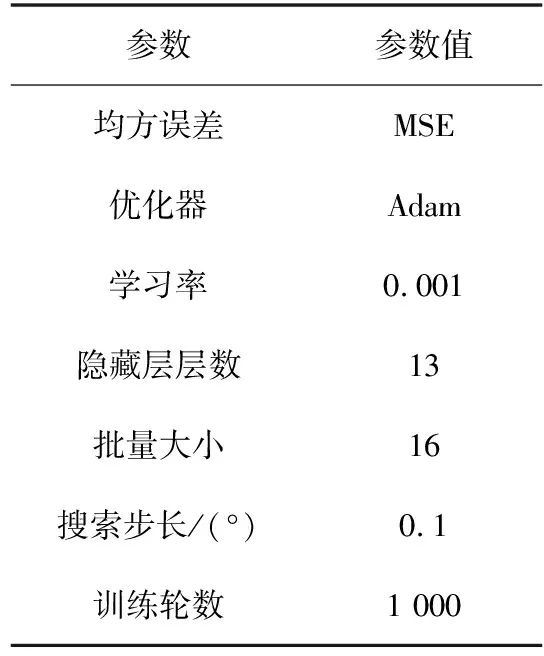
表2 超參數(shù)表Tab.2 Hyperparameter table
衡量DoA估計(jì)性能的指標(biāo)為均方根誤差(Root Mean Square Error,RMSE),表示為:
(9)
本部分仿真選擇如下DoA估計(jì)方法展開對(duì)比:所有方法在與所提方法相同的場(chǎng)景設(shè)置下對(duì)相同信源目標(biāo)進(jìn)行DoA估計(jì)。
① ML[10]:傳統(tǒng)方法,通過ML方法以及交替投影法來估計(jì)DoA。
② MUSIC[11]:傳統(tǒng)方法,利用子空間正交性進(jìn)行DoA估計(jì),并使用空間平滑方法實(shí)現(xiàn)解相干。
③ XGBoost[19]:基于梯度提升樹與集成學(xué)習(xí)原理求解分類問題對(duì)DoA進(jìn)行估計(jì)。
④ DNN[23]:DL方法,設(shè)計(jì)DNN輸入接收信號(hào)協(xié)方差矩陣輸出角度結(jié)果,對(duì)雙目標(biāo)信源進(jìn)行DoA估計(jì)。
⑤ DeepMUSIC-CNN[26]:DL方法,設(shè)計(jì)CNN輸入接收信號(hào)協(xié)方差矩陣輸出MUSIC譜函數(shù),通過CNN構(gòu)建譜函數(shù)以強(qiáng)化傳統(tǒng)MUSIC方法。
⑥ FSL-CNN:本文所提DL方法,輸入信號(hào)協(xié)方差矩陣預(yù)訓(xùn)練CNN。模型部署具體環(huán)境后基于FSL更新CNN并輸出目標(biāo)LoS徑角度估計(jì)結(jié)果。
4.2 DoA估計(jì)性能分析
圖6和圖7為在相同的室內(nèi)環(huán)境下不同估計(jì)方法在精度和估計(jì)時(shí)間方面的比較。估計(jì)時(shí)間比較的方式是在一次DoA估計(jì)階段內(nèi),以所提FSL-CNN方法估計(jì)時(shí)間為基準(zhǔn),比較其他方法估計(jì)時(shí)間與基準(zhǔn)方法估計(jì)時(shí)間的倍數(shù)。從圖6可知,FSL-CNN方法可以達(dá)到0.1°級(jí)別及以下的估計(jì)精度。相較于傳統(tǒng)的機(jī)器學(xué)習(xí)方法XGBoost,所提方法采用DL,可以達(dá)到更高的估計(jì)精度;相較DeepMUSIC-CNN和基于DNN的DoA估計(jì),所提方法具有性能優(yōu)勢(shì),因?yàn)镕SL-CNN考慮設(shè)計(jì)有監(jiān)督的CNN提升模型對(duì)抗未知多徑信號(hào)的能力,同時(shí)提高了分辨LoS信號(hào)的成功率。圖7表明,FSL-CNN方法實(shí)現(xiàn)了估計(jì)時(shí)間的大幅減少,僅稍慢于DNN方法。因?yàn)镈NN不涉及卷積結(jié)構(gòu),計(jì)算速度相對(duì)較快;除此以外所提方法均優(yōu)于其他對(duì)比方法,比如估計(jì)時(shí)間僅為ML與MUSIC方法的萬分之一,對(duì)比XGBoost、DeepMUSIC-CNN方法也是具有更低的時(shí)間開銷。由此可知,所提方法針對(duì)DoA估計(jì)具有良好的實(shí)時(shí)性。

圖6 不同方法性能對(duì)比圖Fig.6 Performance comparison chart of different methods

圖7 不同方法估計(jì)時(shí)間對(duì)比圖(以FSL-CNN 為基準(zhǔn))Fig.7 Estimation time comparison chart of different methods (based on FSL-CNN)
圖8為非多徑模型分別在多徑場(chǎng)景下從零開始重新訓(xùn)練以及基于所提FSL機(jī)制在線學(xué)習(xí)多徑場(chǎng)景特征的歸一化MSE收斂曲線對(duì)比圖。在非多徑環(huán)境下訓(xùn)練所提DoA估計(jì)模型,并使用該模型分別針對(duì)某一多徑環(huán)境進(jìn)行在線學(xué)習(xí)、重新訓(xùn)練。可以看出,所提方法可使模型快速適應(yīng)所部署的多徑場(chǎng)景。僅需要少量的訓(xùn)練輪次(50 epoch)便可基本修正模型的估計(jì)結(jié)果,收斂速度遠(yuǎn)快于從零開始直接訓(xùn)練(500 epoch)。

圖8 在線學(xué)習(xí)與從零開始直接學(xué)習(xí)曲線對(duì)比圖Fig.8 Comparison of online learning and learn from scratch
為驗(yàn)證在線學(xué)習(xí)機(jī)制具有提高模型快速環(huán)境適應(yīng)能力的作用,在非多徑環(huán)境下訓(xùn)練了所提的DoA估計(jì)模型。如圖9所示,當(dāng)模型不經(jīng)過任何額外訓(xùn)練而直接應(yīng)用到一個(gè)具有多徑的室內(nèi)環(huán)境時(shí),顯然其無法實(shí)現(xiàn)準(zhǔn)確的DoA估計(jì)。因此,為使原始模型適應(yīng)新環(huán)境,基于本文所提FSL機(jī)制對(duì)模型進(jìn)行在線學(xué)習(xí)和更新(CNN with FSL),同時(shí)以重新訓(xùn)練的模型(CNN with Retraining)作為對(duì)比。模型經(jīng)過在線學(xué)習(xí)后,可以快速適應(yīng)新場(chǎng)景,能達(dá)到至少 0.1°的分辨率,性能表現(xiàn)基本與重新訓(xùn)練相差無幾。

圖9 所提方法在遷移到不同場(chǎng)景下性能對(duì)比圖Fig.9 Performance comparison chart of proposed methods in migrating to different scenes
4.3 應(yīng)用案例——多站聯(lián)合定位性能分析
僅通過估計(jì)的DoA信息可以推廣到對(duì)目標(biāo)定位:由幾何關(guān)系可知,如果場(chǎng)景中存在至少兩個(gè)不共線的基站時(shí)可以確定一個(gè)位置坐標(biāo),因而聯(lián)合兩個(gè)基站的DoA信息可以實(shí)現(xiàn)對(duì)室內(nèi)目標(biāo)的定位。具體而言,由于基站位置先驗(yàn)已知,同時(shí)合理假設(shè)兩個(gè)基站分享各自的DoA估計(jì)信息,則如式(10)所示計(jì)算可得目標(biāo)位置坐標(biāo)。
(10)
式中:(x,y)、(xR1,yR1)、(xR2,yR2)分別表示目標(biāo)位置、基站1、基站2的坐標(biāo),{θR1,θR2}分別表示目標(biāo)相對(duì)基站1和2的角度,σ表示可能存在的角度測(cè)量誤差。
由于場(chǎng)景中存在許多障礙或目標(biāo)距離基站較遠(yuǎn)的情況,部分基站估計(jì)DoA精度不高,將導(dǎo)致定位不準(zhǔn),而部署多站可以有效增加覆蓋并提高定位精度。針對(duì)部署多站的場(chǎng)景,在兩站幾何式定位基礎(chǔ)上提出一種基于接收信號(hào)強(qiáng)度的最優(yōu)基站選擇機(jī)制,依據(jù)接收信號(hào)強(qiáng)度選擇最優(yōu)的兩個(gè)基站,并基于所選基站估計(jì)的DoA信息如式(10)所示計(jì)算目標(biāo)位置,完整的方法流程如算法2所示。

算法2 多站聯(lián)合目標(biāo)定位方法輸入:n個(gè)基站的接收信號(hào)Xki(t),i=1,2,…,n,k=1,2,…,K輸出:目標(biāo)位置估計(jì)(xk,yk),k=1,2,…,K1:for 1≤k≤K do2:對(duì)于第k個(gè)目標(biāo),根據(jù)接收信號(hào)強(qiáng)度Pr=Xk(t)22選擇強(qiáng)度最高的兩個(gè)基站Sa、Sb,位置分別記為(xa,ya)、(xb,yb)3:對(duì)所選基站Sa、Sb執(zhí)行DoA估計(jì)方法,獲得估計(jì)角度θka、θkb4:利用式(10)計(jì)算目標(biāo)位置(xk,yk)5:k←k+16:end for k
假設(shè)場(chǎng)景中4個(gè)不共線的基站開啟工作,為用戶提供定位服務(wù)。在這一場(chǎng)景下選取2 000組測(cè)試數(shù)據(jù)分別進(jìn)行仿真,每組數(shù)據(jù)僅包含一個(gè)目標(biāo),2 000組數(shù)據(jù)的單目標(biāo)均勻分布于水平面高度為1 m的場(chǎng)景中。對(duì)比兩種多站聯(lián)合定位方法:① 任選兩個(gè)基站執(zhí)行估計(jì)方法,得到兩個(gè)基站的DoA數(shù)據(jù),再進(jìn)行幾何定位;② 采用所提多站聯(lián)合目標(biāo)定位方法選擇連接質(zhì)量最好的兩個(gè)基站,再進(jìn)行幾何定位。結(jié)果如 圖10所示,x軸與y軸共同表示目標(biāo)在x-y平面上的位置,z軸為該目標(biāo)的定位誤差值,誤差值以歐氏距離表示。計(jì)算平均定位誤差可得:方法①為0.020 2 m,方法②為0.017 4 m。由于方法①隨機(jī)兩站定位方法可能使用了信號(hào)質(zhì)量較差的基站數(shù)據(jù),因而導(dǎo)致較高平均定位誤差;而方法②選取了質(zhì)量更佳的兩站執(zhí)行幾何定位方法,將平均定位誤差降低至0.017 4 m。

(a) 隨機(jī)兩站定位

(b) 選取最佳兩站定位
5 結(jié)束語
對(duì)基于DL的室內(nèi)目標(biāo)DoA估計(jì)進(jìn)行研究,提出了一種高效且環(huán)境適變的方法,解決了現(xiàn)有方法效能不佳的問題。所提FSL-CNN方法根據(jù)實(shí)際部署情況,在線學(xué)習(xí)快速更新模型,適應(yīng)復(fù)雜的室內(nèi)場(chǎng)景,有效提高估計(jì)的性能,進(jìn)一步基于估計(jì)的DoA信息提出了一種多站聯(lián)合定位方法。仿真結(jié)果表明,所提方法能達(dá)到0.1°及以下的估計(jì)精度,相對(duì)于大多機(jī)器學(xué)習(xí)方法以及傳統(tǒng)估計(jì)方法,可以實(shí)現(xiàn)更短的估計(jì)時(shí)間。在不同室內(nèi)環(huán)境下,模型通過在線FSL快速適應(yīng)新環(huán)境,仿真表明經(jīng)在線學(xué)習(xí)后的模型估計(jì)DoA能夠達(dá)到0.1°級(jí)別的分辨率。在推廣到多站聯(lián)合定位時(shí),可以達(dá)到0.017 4 m的平均定位誤差,實(shí)現(xiàn)高精度定位。所提方法為室內(nèi)DoA估計(jì)提供了一種方案,未來將對(duì)通感一體化場(chǎng)景下的高實(shí)時(shí)性、高魯棒性感知展開深入研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34